
Abstract
Walking through cluttered environments is a requirement of everyday locomotion, and individuals will walk toward open space and adjust their actions in order to prevent injury. When walking in a confined space, individuals require a shoulder rotation to pass through apertures smaller than 1.3 times their shoulder widths. The current study aimed to identify the action strategies employed by young adults to avoid contacting two obstacles placed in the travel path when walking in a nonconfined space. Participants (N = 12) walked along a 10-m path towards a goal while avoiding two vertical obstacles specifically placed to create an aperture (of 0.6 to 1.8 times the participants' shoulder widths) on opposite sides of the travel path midline. Results showed that participants walked around obstacles that were separated by less than 1.4 times their shoulder width (i.e., critical point). When participants deviated from their initial travel path, they did so by maintaining a consistent protective zone, regardless of the aperture width. The protective zone had dimensions of 3.80 m in the plane of progression and of 0.30 m between themselves and the obstacles at the time of crossing. This study demonstrates that individuals use body-scaled information to control actions in nonconfined space similar to that used in confined space.
Goal-directed locomotion often requires individuals to walk along paths cluttered with obstacles. When faced with obstacles, individuals can choose to adjust limb height or position, modify body segment orientation, change travel path direction, or adjust walking speed. Gibson (1979) argued that actions within an environment are based on what the object being acted upon affords, and these affordances are based on a relationship between the dimensions of an individual's body and those of the obstacles. For example, a stair would afford stepping if its height is less than 0.88 times an individual's leg length, and stair heights larger than this proportion would cause the individual to choose a different action (Warren, 1984). The point at which the dimensions of an obstacle cause the individuals to change his or her actions is called the critical point (Warren & Whang, 1987). In order to assess the critical point for a task, researchers usually implement constraints to the task and measure consistencies in actions as well as the point at which actions change. Knowledge about critical point is important because it establishes control laws that govern action choices.
Warren and Whang (1987) examined whether a critical point exists during aperture crossing by measuring the action strategies of individuals passing through apertures. As participants passed through apertures ranging from 35 to 70 cm in 5-cm increments, it was found that aperture widths similar to an individual's shoulder width would elicit a shoulder rotation in order to safely pass through the aperture. More specifically, individuals consistently required a safety margin greater than 1.3 times their shoulder width (critical point) in order to walk through an aperture without rotating their shoulders (Warren & Whang, 1987). More recently, studies have confirmed the existence of a critical point and found that the angle of shoulder rotation produced at the time of crossing the aperture is proportional to the relative aperture width (Hackney & Cinelli, 2011; Wilmut & Barnett, 2010). As this ratio decreases, the shoulder angle at the time of crossing increases. This fine-tuning of shoulder rotation lends support to the hypothesis that individuals' actions are determined by the relationship between the perceived affordance of the aperture and a person's own action capabilities (Warren & Whang, 1987). Since the magnitude of shoulder rotation is modified to the aperture width/shoulder width ratio, this suggests that young adults use body-scaled information (i.e., shoulder width) to decide when to rotate their shoulders and, additionally, how much rotation is required for success.
In addition to shoulder rotations, research has demonstrated that during static aperture-crossing tasks, individuals make adjustments to walking speed prior to passing through a confined space (Wilmut & Barnett, 2010). The researchers found that the timing of the reduction in speed is tightly related to the relative aperture width such that the smallest aperture sizes produced the earliest reductions in speed. The fact that reductions in speed are also tailored to the size of the aperture suggests that body-scaled information is also used to adjust actions prior to passing through the confined space.
The ability to use body-scaled information to modify actions in confined spaces during static aperture crossings has been well documented in the literature, but research has also shown that individuals can successfully adapt to changes in action capabilities and body size to ensure success when passing through static apertures. Higuchi and colleagues (Higuchi, Cinelli, Greig, & Patla, 2006) demonstrated that when the dimensions of the body are altered horizontally (i.e., holding a bar), individuals adjust shoulder rotation magnitudes to account for this change. As well, when both a change to body dimensions and a constraint in action were imposed on the individuals, they modified their walking speed in order to successfully pass through the narrow apertures. These results suggest that individuals are able to modify their actions to include the artificial increase in body size or constraints placed upon their action capabilities. Therefore, in the absence of any constraints on action capabilities, body-scaled information plays a significant role in guiding actions.
There is strong evidence to suggest that during aperture-crossing tasks individuals use body-scaled information to dictate changes in action (Cinelli & Patla, 2008b; Higuchi et al., 2006; Warren, 1984; Warren & Whang, 1987). Particularly, apertures that are greater than 1.3 times the individuals' shoulder width afford passage, and apertures smaller than this size require a shoulder rotation (Warren & Whang, 1987). These studies have documented strategies employed by individuals when they are forced to walk through a confined space; however, there is a lack of literature that outlines whether similar strategies exist when an individual is given a choice in path selection. The proposed study extends previous findings of action strategies in confined space (i.e., aperture crossing) by examining action strategies used during an obstacle avoidance task in nonconfined space.
The current study aimed to determine the critical point at which individuals choose to change their actions. It is hypothesized that a critical point similar to confined aperture crossing will be identified (i.e., 1.3 times shoulder width); however, the change in action will be the point at which individuals will choose to change travel paths and circumvent the obstacles, even though Gibson (1979) stated that individuals choose to walk towards areas of larger spaces (suggesting that in the current study participants will always choose to circumvent the obstacles because there is larger space on the sides of the obstacles). Fajen and Warren (2003) further demonstrated this by showing that individuals' actions during goal-directed locomotion follow a nonlinear dynamics model such that the individuals use the location of the goal to set up their locomotor axis (i.e., path between individual's current position and goal). While individuals walk towards the goal, obstacles will repel them toward the side that affords more space and produce a minimal deviation from their locomotor axis. We believe that individuals will choose to walk the straightest path towards the goal that will deviate them the least from their locomotor axis whenever possible. Path selection in this case will be guided by an attraction to the goal (Warren 2006) and a desire to maintain momentum along the locomotor axis.
When changes in travel path occur, it is hypothesized that people will scale their actions (such as the timing in path deviation) to the size of the relative aperture width. Specifically, changes in travel path will occur earlier at larger relative aperture widths. This hypothesis stems from previous research suggesting that adjustments to walking speed are tightly coupled to the relative aperture width because the smallest aperture widths produced the earliest reductions in speed (Wilmut & Barnett, 2011). Based on this finding, it is believed that the spatial and/or temporal aspect of a change in travel path will be dependent on the relative size of the aperture width such that of the aperture widths that elicit a change in travel path, the larger apertures would necessitate an earlier path deviation than smaller aperture widths to ensure that a large-enough protective zone is maintained to allow the individual more time to deviate around the obstacles (Gérin-Lajoie, Richards, & McFadyen, 2005).
In addition to an anterior dimension, the protective zone also extends in the medial–lateral direction such that individuals will maintain a safe distance between their bodies and the obstacles at the time of crossing. Cinelli and Patla (2007) showed that when avoiding an approaching obstacle, individuals will deviate to the same medial–lateral position at the time of crossing regardless of how fast the object is approaching. Gérin-Lajoie and colleagues (2005) also showed a constant medial–lateral clearance when circumventing around an object with uncertain movement characteristic. Therefore in the current study it is hypothesized that individuals will leave similar-sized safety margins (medial–lateral clearance at the time of crossing) regardless of the aperture width rather than scale these medial–lateral safety margins to the aperture width.
Method
Participants
Twelve young adults (age: 23.8 ± 1.1 years) volunteered for the study. All participants had normal or corrected-to-normal vision, were free of any physical limitations affecting limb movement, and were not high-level athletes. Testing procedures were approved by the Wilfrid Laurier University Research Ethics Board and the University of Guelph Research Ethics Services. All participants gave their informed consent.
Apparatus
The experiment was conducted within a 10 × 6-m space, and participants walked along the long axis towards a vertically oriented goal located at the end. Two identical pole obstacles (2.45 cm tall × 0.17 m wide) were placed along the path at 5 m from the start on either side of the midline. The obstacles created an aperture that ranged between 0.6 and 1.8 times (in seven increments of 0.2) each individual's shoulder width on any given trial. Participant's shoulder widths were recorded by measuring the widest horizontal distance across the shoulders with a tape measure.
Kinematic data were collected using the OptoTrak camera system (Northern Digital Inc., Waterloo, ON, Canada) at a sampling frequency of 60 Hz. Participants were outfitted with two rigid bodies placed on the head and torso and had five digitized landmarks including: left and right ears, left and right acriomio-clavicular joints, and the 12th thoracic vertebrae.
Procedure
During the experimental trials, participants were instructed to approach the goal located at the end of the pathway at their normal pace and avoid colliding with the obstacles placed along the pathway (Figure 1). No direct instructions were provided as to how to avoid the obstacles. Participants began each trial in one of three randomly assigned starting locations (each location was separated by 20 cm in the anterior–posterior direction) to ensure that individuals were using visual information about the environment to control their actions and not simply relying on a consistent number of steps to initiate a change in action. Prior to the start of each trial, participants were instructed to face the wall behind them (opposite to the direction of travel) while the experimenter changed the position of the objects, creating a new medial–lateral distance between the obstacles. Each participant preformed four baseline trials (no obstacles present) and 28 randomized experimental trials (7 aperture widths × 4 trials). The baseline trials were used to determine each participant's straight walking path and to determine if and when a change in travel path occurred.
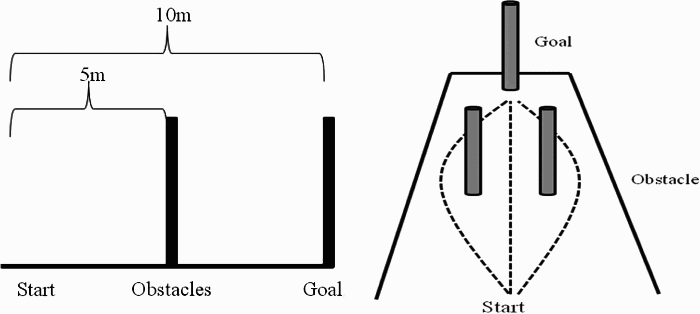
Ariel view of experimental set-up and the three path options.
Data analysis
The location of each participant's centre of mass (COM) was estimated using a similar approach to that of Winter, Patla, Prince, Ishac, & Gielo-Perczak (1998) where the three digitized points were located on the posterior aspect of the torso. The approach velocity was calculated using the change in displacement of the COM over a change in time for the first 1.5 m of each trial. The approach phase was defined as being from the start of movement to the position of path deviation or the first 1.5 m of walking data on trials in which no deviation was identified. A reduction in walking speed was said to have occurred if the approach velocity fell outside two standard deviations and remained outside the average velocity of the baseline trials.
The absolute medial–lateral (M-L) position of the COM at the time of crossing the obstacles was used to determine what path the individual took to get to the goal. Positions close to zero represented trials in which the individual walked through the aperture, and larger values were representative of deviation trials. The average M-L COM position at the time of crossing was calculated for each aperture width, and the critical point was defined as the aperture width that was statistically significant from aperture width 0.6 (where all individuals walked around the obstacles) and not significantly different than zero (compared to baseline trials). To determine whether a shoulder rotation was employed as a change in action, the shoulder rotation angle was calculated from the two infrared light emitting diodes on the left and right shoulders (by creating a virtual horizontal line between them) throughout the trial. A significant shoulder rotation was said to occur if the rotation magnitude fell outside two standard deviations of the average rotation during the baseline trials and remained outside for more than 0.1 s.
A change in travel path was confirmed when the medial–lateral COM fell outside two standard deviations and remained outside the average (±2 SDs) COM trajectory of the four baseline walking trials. A frequency count of the number of trials in which a change in travel path occurred was then calculated. Trials that produced a change in travel path were given a score of 1, and trials where participants walked straight through the aperture received a score of 0. At each aperture width, the proportion of deviation trials in which travel path deviations occurred was calculated and compared across aperture widths. The M-L safety margin (i.e., distance between outer edge of pole and individual's acromium at the time of crossing) was calculated only for the trials where participants chose to circumvent rather than walk through the obstacles. The anterior–posterior safety margin was determined by using the calculated anterior–posterior COM location. This value was calculated as the distance between the midpoint of the two obstacles to the participants' trunk anterior–posterior COM location at the point where the individual was no longer on a straight walking path.
In order to determine how individuals avoided the obstacles, the stepping strategy was also examined by determining whether participants adjusted their base of support (BOS) at the time of path deviation. A score of 1 was given to trials in which a step-wide strategy (i.e., increase in BOS) was used and a score of 0 for those trials in which a step-narrow strategy (i.e., decrease BOS) was used. The percentage of step-wide strategies at each aperture width was then calculated.
Statistical analysis
The critical point was determined using a one-way repeated measures analysis of variance (ANOVA), and Tukey's honestly significant difference (HSD) post hoc analysis determined where a significant drop in position occurred. To confirm that the identified aperture width (from the ANOVA) was indeed the point at which individuals started to walk through the aperture, the identified aperture width was compared to the position of the M-L COM for the baseline trials using a paired t test.
In order to determine whether action strategies changed across aperture widths, one-way ANOVAs with repeated measures were used to determine whether the onset of path deviations, the medial/lateral deviation at time of crossing, and approach velocity were affected by aperture width. Tukey's HSD post hoc procedures were carried out for all significant main effects, and p-values less than .05 were accepted as significant.
Results
All participants successfully avoided the obstacles on every trial and chose to circumvent the obstacles at apertures smaller than the critical point. When deviations to the travel path were made, individuals used a step-wide approach 79% of the time.
Critical point
A one-way repeated measures ANOVA revealed a main effect of aperture width, F(6, 36) = 65.02, p < .001, where the M-L position at the time of crossing decreased as the relative aperture width increased (Figure 2). Tukey's HSD post hoc analysis determined that apertures 1.4–1.8 were significantly different from apertures 0.6–1.2. This determined that, on average, individuals walked through apertures 1.4 times their shoulder width and larger and changed their travel paths at apertures smaller than this value. A paired t test revealed that the M-L position of the COM at the time of crossing during aperture width 1.4 was not significantly different from the M-L COM position during the baseline trials, confirming that the critical point occurred at aperture width 1.4.
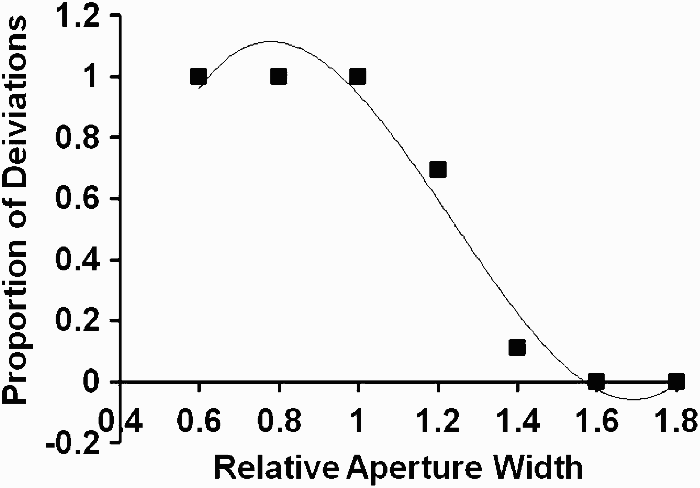
Post hoc analysis revealed that the individuals made a significant change in their travel path option at apertures 1.4–1.8 (p < .001). Therefore, the critical point at which individuals chose to walk through rather than around the aperture was at 1.4 times their shoulder width.
Action strategies
On trials where individuals walked around the obstacles, statistical analyses revealed no significant effect of aperture width on the point of path deviation. Participants consistently deviated from their normal walking path when they were 3.80 m from the obstacles regardless of aperture width and consistently maintained a safety margin of 0.30 m between the outer border of the participants' inside shoulder and the outer border of the obstacle closest to the side of avoidance at the time of crossing (Figure 3).
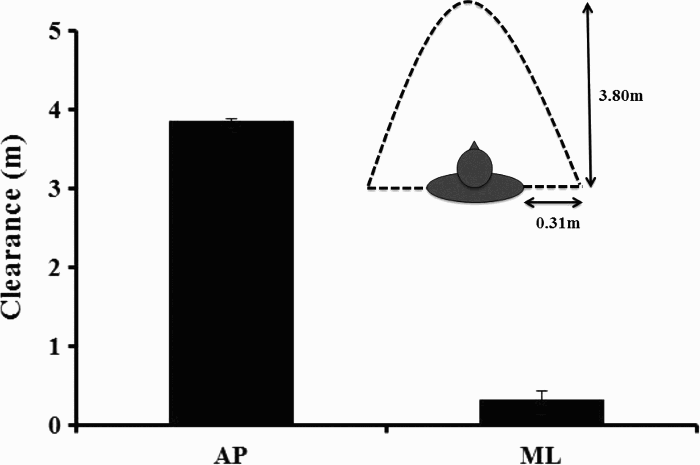
When circumventing the obstacles, individuals change their travel path when they are 3.80 m from the obstacles and leave a safety margin of 0.30 m between the obstacle and their shoulders at the time of crossing. The dimensions of the personal space are maintained regardless of the aperture width. AP = anterior-posterior direction; ML = medial-lateral direction.
On all trials, analyses revealed no significant difference in approach velocity and no significant reductions in walking speed prior to the obstacle approach at any aperture width. Participants approached the obstacles at speed of 1.50 m s−1 (±0.01 m) regardless of aperture width.
Discussion
The objective of the current study was to determine the critical point at which individuals change their actions and the action strategies employed when avoiding two stationary obstacles in unconfined space. The critical point can be thought of as the “when”, and the action strategies can be thought of as the “how” an avoidance will occur. We hypothesized that the critical point would occur at a similar point to that found in confined aperture crossing; however, we expected to observe a change in travel path. As well, we hypothesized that individuals would scale changes in their actions based on the relative aperture width because they use body-scaled information to control their movements (Hackney & Cinelli, 2011; Wilmut & Barnett, 2010).
Critical point (“when”)
Similar to confined aperture crossing, the current study found that individuals changed their actions (i.e., critical point) at apertures that were 1.4 times their shoulder width or smaller (Hackney & Cinelli, 2011; Warren & Whang, 1987; Wilmut & Barnett, 2010). This behaviour suggests that even when individuals are not confined to a particular path or action, they continue to use body-scaled information as the control parameter to determine whether or not an aperture is passable. Fath and Fajen (2011) confirmed that the passability of apertures is based on contributions from eye-height-scaled, dynamic-head-sway-scaled, and dynamic-stride-length-scaled information. These sources of information interact during locomotion and allow individuals to accurately scale apertures to the size of their body. Since the current study confirmed a body-scaled approach to aperture crossing, it can be assumed that the individuals continue to use information about eye height, head-sway, and stride length to judge the passability of apertures in nonconfined space and adjust their actions at apertures deemed too small for safe passage.
In confined aperture crossing, the change in action observed is a rotation of the shoulders to decrease the horizontal width of the individual and ensures successful passage (Warren & Whang, 1987). The current study shows that in unconfined space when the obstacles create an aperture that was less than the critical point, individuals choose to change their travel path and walk around the obstacles rather than walk through the aperture. This difference in strategy between confined and unconfined space may be due to a desire to maintain stability and/or momentum. Research has shown that when enough preparation time is available, changes in foot placement are the preferred strategy to control the centre of mass and maintain stability (Patla, Prentice, Robinson, & Neufeld, 1991). In our study, individuals employed a step-wide strategy (i.e., increase in base of support) at the point of path deviation on 79% of the avoidance trials. The high incidence of this strategy indicates a strong desire to maintain a stable action strategy. On the 21% of the trials when a step narrow (i.e., decreased base of support) was used, momentum was preserved because foot placement was still in line with current direction of travel (Patla, Adkin, & Ballard, 1999)
Regardless of whether individuals chose to maintain stability or momentum at the point of deviation, the establishment of a critical point suggests the existence of control laws to govern actions. Fajen and Warren (2003) determined control laws for steering behaviours, obstacle avoidance, and route selection and suggested that all are a function of the relative angles and distance between the individual's instantaneous position, the obstacles, and goal. Path selection is guided by the attraction of goals and the repulsion of obstacles, and individuals choose the most appropriate path that accounts for these dynamics. The behavioural dynamic model can accurately predict the path that individuals will take in simple environments where the choice of path is either to the left or to the right of a single obstacle. In the current study, each individual was confronted with two obstacles, which creates three possible paths. Based on the behavioural dynamic model (Fajen & Warren, 2003), the presence of two obstacles located side by side would create repulsion force not only between the individual and the obstacle, but also between the obstacles (i.e., the aperture). In situations where the aperture is larger than the critical point, it is likely that the obstacles were far enough apart that when the individuals were in close proximity to the obstacles, the attraction strength of the goal was greater than the repulsion forces between the obstacles, resulting in the individuals steering through the middle of the two obstacles. Likewise, it is possible that when apertures were less than the critical point, the repulsion of the obstacles converged and overrode the attraction of the goal, forcing individuals to change their path trajectory (i.e., walk around the obstacle rather than between them).
Action strategies (“how”)
When circumventing an obstacle, individuals made a change in travel path when they were a consistent distance from the obstacles regardless of the relative aperture width (Figure 3). We hypothesized that changes in travel path would be scaled to the size of the aperture such that larger apertures would be avoided earlier in order to maintain similar path deviation angles. In contrast, our findings suggest that individuals use a consistent optical expansion threshold to determine when an avoidance should occur (Cinelli & Patla, 2007). Therefore, obstacle avoidance actions are based on time-to-contact information (i.e., consistent distance of avoidance) and not on dynamic stability (i.e., constant angle of deviation).
In addition to a change in travel path it was also hypothesized that reductions in walking speed would be scaled to the size of the aperture. Previous research has demonstrated that reductions in walking speed are greater at smaller aperture widths than larger ones (Wilmut & Barnett, 2011). However, the current study showed that individuals do not adjust their walking speed prior to crossing the obstacles. It is possible that reductions in speed are linked to tasks where a shoulder rotation is necessary (confined versus nonconfined aperture crossing). Since individuals chose to circumvent the obstacles rather than produce a rotation, a reduction in speed may not have been deemed necessary for successful avoidance because the individuals may have wanted to maintain forward momentum. It is also possible that the early path deviations reduced the length of the approach phase enough that individuals did not reach a fast-enough walking speed to warrant a reduction before making a deviation to their travel path.
Our results demonstrate that individuals use an elliptical protective zone to control actions when avoiding obstacles (Figure 3), which is in line with previous research examining locomotor adjustments in obstacle avoidance (Gérin-Lajoie, Richards, Fung, & McFadyen, 2008). However, Gérin-Lajoie and colleagues (2005) found that path deviations were initiated 4.5 m prior to a stationary or moving obstacle whereas the current study found the distance to be 3.8 m. An avoidance distance similar to that observed by Fajen and Warren (2003) was identified. The discrepancy in distance of avoidance is likely a result of the differences in the properties of the obstacle. Gérin-Lajoie et al. (2008) used a single object with unpredictable movements whereas Fajen and Warren (2003) and the current study used obstacles that were stationary throughout the experiment, and knowledge about their movement capabilities were known. It is likely that the predictability of an object's movement plays a large role in the timing of path deviations. Regardless of the dimensions, the current study supports the existence of a protective elliptical zone, and the dimensions of the zone are dependent on properties of objects with the environment. Since path deviations appear to be environment specific, this study supports the idea that obstacle avoidance is visually controlled (Cinelli & Patla, 2008a).
Once a change in travel path was made, individuals allotted a consistent medial–lateral displacement (i.e., safety margin) at the time of crossing between the obstacle and the outer border of the shoulder closest to the obstacle regardless of the relative aperture width. This finding is consistent with previous research demonstrating that when individuals are avoiding an approaching obstacle, the magnitude of deviation at the time of passing the obstacle remained constant regardless of the approach velocity (Cinelli & Patla, 2007). The fact that individuals in the current study changed travel paths at a consistent distance from the obstacles and maintained a consistent safety margin for all aperture widths suggests that individuals use online visual control to make changes to action. These changes to action are visually driven and emerge from information obtained as the individuals approach the obstacles.
Conclusion
Overall, the results of the current study demonstrate that regardless of whether individuals are given a choice in path selection or forced to walk through an aperture, the passability of the aperture is based on body-scaled information. Apertures smaller than 1.4 (i.e., the critical point) require an individual to change their actions. However, the change in action is task specific and may include a change in body position or orientation, a change in velocity, or a change in travel path. When changes in travel path are made, individuals maintain a protective zone around their bodies that is scaled to the relative aperture width. This protective zone appears to be environment specific but is consistent regardless of the aperture width.