
Abstract
For the scaling process to be successful, it is important to first detect the loose rock. Even today, this task is mainly performed by experienced personnel. This leads to opportunities for increased potential to use sensor driven digital assistance systems. This paper presents a review and analysis of sensor-based loose rock detection methods considering the specific conditions of testing and use. The investigations can be classified into three categories based on their respective sensor technology approach. The opportunities for automating the scaling process highly depend on the method used. If scaling is conducted manually, the pre-entry examination could be automated. For the automation of the entire process, the use of machinery is more beneficial. Long wave infrared (LWIR) cameras or visual techniques have a great potential. However, in the case of LWIR, innovative methods for generating a sufficient heat flow between air and rock need to be developed in future.
Introduction
In conventional underground mining, the scaling process is an important task in the drill and blast cycle. Loose rock in the roof, that is generated by blasting, must be removed in a controlled manner in order to create a safe working environment for miners and that no equipment is damaged by rock fall (Safety Health and Environment Division 1997). An important prerequisite for successfully performing the scaling process is the detection of loose rock. To date, this task is mainly performed manually by experienced miners, because it requires a high degree of experience, awareness and knowledge about the conditions in a particular mine. Loose rock detection has therefore great potential to be enhanced by sensor technologies, which may first be implemented in the context of an assistance system, in order to support the miner in detecting loose rock. If successfully implemented, this can be an important step towards the automation of the scaling process for which the use of sensor-based loose rock detection is essential. The objective of this paper, through the various sections, is to provide background information about scaling and to review and analyse the existing literature on the sensor-based detection of loose rock studies regarding the potential for future automation processes. Consideration is given to the specific terms of testing and these are utilised to highlight possible reasons for differences and to show under which conditions they can be implemented. The paper concludes with recommendations for further research in the field of sensor-based loose rock detection methods.
Scaling in underground mines
This section aims to give a comprehensive overview about the scaling process in order to highlight the importance of detecting loose rock.
Scaling must be conducted after blasting, before resuming any further work, to ensure a safe working environment. As shown in Figure 1, the scaling process comprises a number of tasks that follow one another.
Main tasks commonly constituting the scaling process.
The first task – identification of areas with loose rock – will be discussed in the next section in detail. The identification task is followed by barring down the loose rock. The method of barring down has a significant impact on how loose rock can be detected properly and efficiently as part of the scaling process. Before performing the scaling process at a different location, it must be evaluated whether the loose rock has been fully removed. If not, the process must be continued, or, in the worst case, the area must be closed down (Safety Health and Environment Division 1997s). Scaling usually is followed by installing ground support via anchors, shotcrete, mesh or other support methods. However, a detailed description of ground support methods is beyond the scope of this paper. Moreover, scaling is not only performed immediately after blasting, but is rather a task that must be performed continuously to remove loose rock that is generated for example due to blast vibrations or mining induced stress (Szwedzicki 2005).
To date, scaling is mainly conducted manually. Miners remove the loose rock using a scaling bar. Even though this method is simple and cost efficient, it is dangerous as falling rock could lead to injury or even fatalities. From a risk management point of view, this is surely unacceptable. At heights greater than 3.5 m, it is difficult to perform the scaling process manually, as it is beyond the reach of the miner with the scaling bar. In this case, platforms are used to reduce the distance between the miner and the roof. Therefore, at great heights (> 3.5 m), the use of machinery is advantageous. Often, machines that are already present, such as drill jumbos, are used. However, since they are not designed for scaling, this can result in damage to the machine. The use of machinery specifically designed for the scaling process, such as a scaler, will be more suitable in this instance. This is because a scaler includes a larger range of motion for the boom. Furthermore, the machine can protect the operator from falling rock (Safety Health and Environment Division 1997). Furthermore, there have been investigations on using a high-pressure water jet for scaling. This method, called hydro-scaling, is considered to be effective to speed up the scaling process and can improve the adhesion of shotcrete if it is performed prior to the application of shotcrete. Compared to manual scaling, hydro-scaling offers the potential to remove the fines more effectively. Compared to a mechanical scaler, hydro-scaling can only be used to remove looser, blast fractured material while a mechanical scaler offers the potential to remove bigger blocks (Jenkins et al. 2005; Stewart et al. 2006).
Loose rock detection methods
As highlighted in the previous section, an important prerequisite to successfully barring down the loose rock is the detection of appropriate areas. Thus, the objective of this section is to provide an overview of existing work on loose rock detection. A literature search has identified eight different research studies. Three of the concepts presented in the studies were also patented (Hanson 1986; Pettigrew et al. 1991; van Zyl Brink and Teboho 2013).
In the original method for detecting loose rock, the miner conducts the inspection and evaluation of the roof independently without using any sensors and supporting data processing methods. The first task is to visually search for possible weak points, cracks and discontinuities. If the scaling process is performed manually, the miner uses the scaling bar to tap the roof and, based on the resulting sound, it is possible to detect loose rock. While the resulting sound of solid rock is described as a clear ping or click noise, the sound of loose rock is more dump and drumming (Summerfield 1956). If the scaling process is performed using machinery, an experienced miner is able to detect loose rock based on the sound and vibrations of the machine.
Based on discussions with mines and OEMs (personal communication) it becomes clear that the loose rock detection is still widely detected manually, however, challenges and risks arise, for example, resulting from the miner's lack of experience and physical constraints in fully investigating and evaluating the roof. This could be because of dust, limiting the visibility, or because of acoustic limitations, due to ambient noise or due to health related reasons, such as a lack of hearing (Hanson 1985). Since this method for loose rock detection is a subjective procedure, the evaluation can only have a subjective result but loose rock cannot be detected based on predefined parameters, according to Summerfield (1956).
Therefore, assisting this process with suitable sensor technologies can be advantageous. As a first step, sensor technologies can be part of a system designed to assist the miner in the loose rock detection. This means to get further evaluation based on objective criteria, i.e. characteristic values obtained from the sensor data. Furthermore, the use of sensor technologies, if successfully implemented, offers the potential for remote applications and future automation of the scaling process so that the miner no longer has to enter potentially hazardous areas. The investigated technologies aim to imitate or enhance the miners’ senses for detecting loose rock, which means to hear, feel or see it.
In the 1940s, various investigations on using geophones for loose rock detection were conducted. However, the geophones did not give an accurate reproduction of the rock vibrations (Summerfield 1956).
In the 1950s, Summerfield (1956) investigated the feasibility of sensor-based detection of loose rock in shale and sandstone. Experts identified areas of loose and solid rock to be investigated. A velocity and an acceleration sensor were attached to the rock, either by using a mounting plate or by cementing them directly on the rock. Furthermore, a microphone was set up to record the air vibrations. Using different types of scaling bars, impulses were generated at a distance of about  . Summerfield (1956) showed that all three sensors are feasible for loose rock detection. However, the use of microphones seems most advantageous, since they are easy to apply.
. Summerfield (1956) showed that all three sensors are feasible for loose rock detection. However, the use of microphones seems most advantageous, since they are easy to apply.
Further investigations were conducted by Allison and Lama (1979). The hypothesis of their work is that every physical element stores potential energy when it is undergoing deformation. If discontinuities are formed, there is a shift of the frequencies of the rock into lower frequencies. Therefore, low-frequency sound-based techniques are especially suitable for loose rock detection.
A first device for loose rock detection was presented and patented by Hanson (1985, 1986), whose research was based on the hypothesis that a decreasing stiffness of rock, which is an indicator for the formation of loose rock, results in decreasing resonant frequencies. Even though absolute numbers for the frequencies and the amplitudes in the signal depend on individual conditions, this phenomenon can be generally observed. Based on this theoretical background, Hanson (1985) started practical investigations in which one acceleration sensor was attached to the rock, while a second one was mounted on the scaling bar. Impulses were then generated in varying distances from the sensor. Since the use of the sensor mounted on the rock resulted in better distinction between loose and solid rock, this setup was patented as Detached Rock Evaluation Device (Hanson 1986). The signal, which is generated by tapping on the roof and detected by the sensor, is pre-amplified and then divided into a low-frequency band of  and a higher frequency band of
and a higher frequency band of  . Loose rock is then detected by comparing the measured signal gain of the frequency band pass filters. Pettigrew et al. (1991) patented a loose rock detector that comprises of an impact tool for hitting the rock surface, sensors for detecting acoustic features, the rock motion and the impact force, a data processor and a display unit. The device was developed for hardrock mines and can, in addition, determine the degree of rock looseness. Pettigrew et al. (1991) propose different criteria by which loose rock can be identified. Based on the acoustic features, according to Equation (1), loose rock is characterised by metric
. Loose rock is then detected by comparing the measured signal gain of the frequency band pass filters. Pettigrew et al. (1991) patented a loose rock detector that comprises of an impact tool for hitting the rock surface, sensors for detecting acoustic features, the rock motion and the impact force, a data processor and a display unit. The device was developed for hardrock mines and can, in addition, determine the degree of rock looseness. Pettigrew et al. (1991) propose different criteria by which loose rock can be identified. Based on the acoustic features, according to Equation (1), loose rock is characterised by metric  while solid rock is characterised by metric
while solid rock is characterised by metric  . In tests conducted in a mining environment this was found to be a good criterion. However, there is no information regarding the evaluation for
. In tests conducted in a mining environment this was found to be a good criterion. However, there is no information regarding the evaluation for  .
.

 and
and  . The impact tool of the loose rock detector can be mounted on the boom of a mechanical scaler. It is also possible to use it with a manually operated tool.
. The impact tool of the loose rock detector can be mounted on the boom of a mechanical scaler. It is also possible to use it with a manually operated tool.
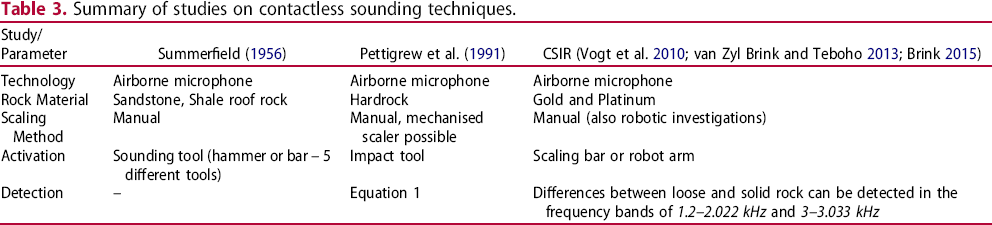
The Electronic Sounding Device (ESD), developed by the Council for Scientific and Industrial Research (CSIR), is an apparatus that aims to imitate the miner's acoustic investigations for detecting loose rock. The ESD includes a microphone for detecting the sound resulting from tapping on the roof, an on-board Linux system for processing and analysing the signal, coloured LEDs for giving a visual feedback and headphones for giving an acoustic feedback (Vogt et al. 2010). Based on investigations in South African mines and tests in a controlled laboratory environment, it was found that the differences between loose and solid rock can be detected in the frequency bands of  and
and  respectively (Brink 2015). The purpose of the ESD is to enable an objective evaluation of areas where loose rock might be present. It was also patented in 2013 as Method and Apparatus for Assessing the Integrity of Rockmass (van Zyl Brink and Teboho 2013).
respectively (Brink 2015). The purpose of the ESD is to enable an objective evaluation of areas where loose rock might be present. It was also patented in 2013 as Method and Apparatus for Assessing the Integrity of Rockmass (van Zyl Brink and Teboho 2013).
In addition to using sound-based techniques for detecting loose rock, the use of thermal infrared cameras as a visual method has also been investigated. Compared to sound-based techniques, this method is advantageous, because a continuous-spaced localisation of loose rock also becomes possible (Allison and Lama 1979).
The concept of using infrared thermography – also called Long Wave Infrared Radiation (LWIR) – was described by Stateham (1976). It is based on the hypothesis, that the heat flow in the rock is interrupted if loose rock is present. In this case, loose rock is more responsive to the temperature of the mine air. This results in temperature differences of loose and solid rock which makes it possible to detect the loose rock. However, this method can be limited by factors such as the environmental conditions or the heat conductivity of the material. When the surface temperature and the air temperature reach an equilibrium, there is no heat flow between the air and the rock and therefore no differences between loose and solid rock are visible.
Further investigations on using LWIR cameras have been conducted by Yu et al. (1990) who stated that there is a temperature difference between loose and solid rock if the air temperature and the temperature of the rock differ, so that there is a heat flow. In addition to this, Yu et al. (1990) also investigated methods on how to increase this temperature difference and presented the use of diesel exhaust gases as the most promising method.
The use of LWIR cameras was also investigated by the CSIR. In 2000, Kononov (2000) presented the results of a pre-feasibility study on the application of thermal infrared for the loose rock detection in hardrock mines. Kononov (2000) theoretically estimated the heat transfer between the air, the surface of a tunnel and the virgin rock. These investigations were evaluated by experiments in two gold and platinum mines in South Africa considering the ventilation air velocity, the rock and air temperature, the age of mining and the geometrical shape and size of loose rock. Within these experiments, only loose rocks with regular shapes were considered. Kononov (2000) concluded that the application of LWIR could be used for the detection of loose rock and recommended that an IR-radiometer be developed which is portable and can be used for roof and wall scanning. This research was also done at CSIR, where researchers hypothesised that the detection of loose rock is possible with sufficient ventilation because loose rock is cooled more than the surrounding rock. Challenges due to a limited field of view can be addressed using image stitching (Vogt et al. 2010; Green et al. 2011).
Instead of using a single sensor system, the CSIR additionally investigated into combining LWIR cameras with a variation of the ESD. This increases the overall probability of detecting the loose rock (Green et al. 2011). The system can also be mounted on a robot to increase the automation of the pre-entry investigation, so no miner has to enter the potentially hazardous areas for investigation.
Iverson and Signer (2014) investigated the application of LWIR for loose rock detection in six different underground metal mines. Within these investigations, images of the loose and surrounding rock before and after manual scaling were taken. Furthermore, a detailed documentation including the ventilation air temperature, the solid rock surface temperature, the site type, etc. was presented. In accordance with previous studies, Iverson and Signer (2014) concluded that with larger difference between the temperature of the solid rock and the ventilation air it becomes easier to detect loose rock and recommended to use this method to detect loose rock between bolts and in old areas where meshes and shotcrete for ground support are not used.
Analysis and evaluation of existing loose rock detection approaches
In this section, the presented studies on the sensor-based loose rock detection are compared and analysed. For this purpose, the studies are first classified into different categories based on their respective sensor technology approach. Next, the parameters, to compare the presented research studies, are introduced. The identification of these parameters is followed by a qualitative analysis that serves to identify the strengths and limitations of these studies regarding their use for a possible future process automation and to identify the needs for further research.
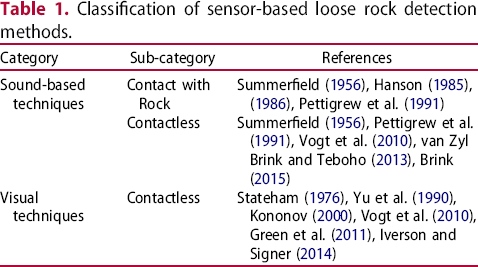
As presented in Table 1 the studies and methods introduced in the previous section can be classified into three categories. A distinction between Sound-based Techniques and Visual Techniques is first made, followed by a distinction between techniques that have direct contact with the rock and contactless techniques. Generally, the studies can be classified into the following categories:
Sound-based Techniques – Contact with Rock utilising acceleration sensors. Sound-based Techniques – Contactless utilising airborne microphones to detect the resulting sound when a miner strikes the roof with the scaling bar. Visual Techniques – Contactless includes studies on the use of LWIR for loose rock detection. Classification of sensor-based loose rock detection methods.
In addition to these already tested technologies, the application of further technologies is also conceivable in the future.
Within this section, only experimental studies are considered. Therefore, the studies of Allison and Lama (1979)will be excluded since they are only theoretical investigations.
To compare the studies, the testing conditions must first be elaborated in order to highlight possible reasons for differences and to show under which conditions they can be implemented.
The first factor considered is the rock material in which the tests were conducted. Whether the method works contactless or requires direct contact with the rock material was already considered in Table 1. Furthermore, when comparing the different studies, the method of scaling as well as the possible need for generating a signal, which is summarised as Activation, is considered. Finally, a parameter regarding the detection criteria of loose rock summarises the method of data analysis to highlight how loose rock is defined and evaluated in the respective studies.
Summary of studies on sounding techniques with direct contact to the rock surface.
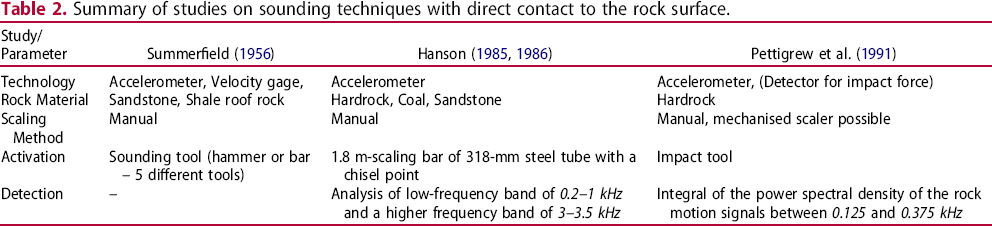
The studies presented were mainly conducted in the context of manual scaling to detect loose rock using a scaling bar. The material of the scaling bar, as well as the intensity of the pushing force applied to it, can have an influence on the amplitude of the signal but not on the frequencies. Only Pettigrew et al. (1991) present a technique that can possibly be attached to a mechanised scaler.
Even though a couple of studies on using sound-based techniques with a direct contact to the rock surface were conducted and reported to be useful for loose rock detection (Summerfield 1956; Hanson 1985, 1986; Pettigrew et al. 1991), there are some disadvantages, especially in the context of a possible future automation of the scaling process. If the goal is to increase safety in underground mines by optimising the detection of loose rock, achieving this goal is limited by the fact that someone must first go into the potentially hazardous area in order to attach the sensor to the rock. Furthermore, using acoustic sound-based techniques does not allow the localisation of loose rock.
Summary of studies on contactless sounding techniques.
Summary of studies on contactless visual techniques.
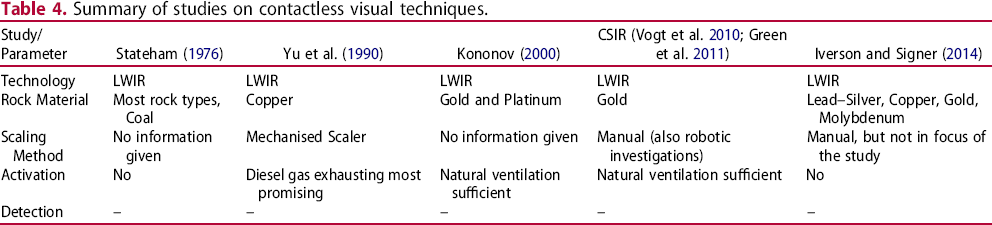
The advantage of using visual techniques is that they also allow localisation of the loose rock. Furthermore, they can be used in the context of manual scaling as well when using a mechanised scaler. However, it becomes clear that, additionally, a method for generating sufficient heat flow may need to be considered. Yu et al. (1990) suggest using the diesel exhaust of the mechanised scaler. This method is critical with regard to the health of the workers, among others, so further research needs to be conducted on how to quickly generate the heat flow needs.
Discussion
In mining, there is a growing shift towards automated or remote-controlled processes (Clausen et al. 2020). However, scaling and with this loose rock detection is widely still performed manually which might be due to the complexity of the process. Nevertheless, it is also a highly dangerous process and therefore offers great potential for future automation. The opportunities for automating the scaling process highly depend on the method of scaling. If scaling is conducted manually, the pre-entry examination could be automated as described by the CSIR (Green et al. 2011). However, the miner still must enter the potentially hazardous area to remove the loose rock.
Therefore, the application of machinery offers greater potential to fully automate the scaling process. In this context, the integration of suitable sensor technologies for the loose rock detection is of great importance in order to reduce the risk of uncontrolled rockfall. The future potential of using sound-based techniques with direct contact to the rock for being used in this context is considered to be low as long as there is no possibility to adequately attach the sensor to the rock without human assistance on-site. Instead the need for a person to attach the sensor to the rock could raise the risk for accidents. Airborne microphones, which are used as contactless sound-based techniques, have a greater potential within the context of a possible process automation. However, data analysis is highly challenging because the impact of ambient noise needs to be considered. Furthermore, additional methods for locating loose rock are needed. LWIR cameras or contactless visual techniques have a great potential as they could be used without any human assistance on-site and allow the localisation of loose rock. However, in the case of LWIR, innovative methods for generating a sufficient heat flow between air and rock need to be developed in future.
In the context of the automation and digitalisation of mining machinery and processes, sensor-based loose rock detection will become more important and is therefore part of the research at the Institute for Advanced Mining Technologies (AMT) at RWTH Aachen University in Germany. The AMT's research focusses on the automation and digitalisation of mining machinery and processes by including suitable sensor technologies in the mining environment. Within this research, the institute has already gained experience in related activities such as the crack detection using LWIR.
Conclusion and recommendations
In conventional underground mining, scaling must be conducted to remove loose rock that has been generated by the blasting process in order to create a safe working environment. An important prerequisite for removing the loose rock is its detection. To date, this task is mainly performed by an experienced miner and requires a high degree of experience and awareness. Therefore, the use of suitable sensor technologies for supporting the miner in detecting loose rock will be of great advantage.
In this paper, previous investigations on the sensor-based detection of loose rock were reviewed and analysed considering selected parameters. Despite the fact that different studies on the sensor-based loose rock detection have been conducted, to date, the authors are not aware of any research where sensors for the detection of loose rock are in use.
In order to gain more experience on the issues and challenges of this research topic, one could first implement one of the technologies that seem to be promising within a scaling system to assist the miner in detecting loose rock. If successfully implemented, the scaling process could be performed remotely before it will be automated. Besides the implementation of technologies presented in this paper, implementing novel technologies might also be possible.
Footnotes
Disclosure statement
No potential conflict of interest was reported by the author(s).