
Abstract
Surface reconstruction technology based on cloud data has broad prospects in the fields of reverse engineering, cultural heritage protection, and smart city construction. This article studies the surface reconstruction pattern recognition technology based on scattered point cloud data. The candidate feature points are extracted according to the surface variation, and the precise method of point cloud is used to fit the clustering plane, and the feature points are selected from the candidate feature points. Use the area increase method to construct the initial grid of the specific three-dimensional point group data. In the construction process, the normal vector of the point group data does not need to be separated, but defines the angle of the normal vector of the adjacent triangular grids, thereby separating relatively flat areas. Using the projection parameterization method, the scattering points in the domain are projected onto the curved surface, and the parameter values of the projection points are counted as the parameter values of the scattering points. All sampling points on the common boundary have tangent vectors along the two directions of the boundary. The direction of the bisector of the angle between the two tangent vectors is calculated as the direction of the connection vector outside the boundary of the sampling point. It can be seen from the experimental data that the search radius of the normal vector and feature descriptor when calculating the feature description operator is 0.01 and 0.02 m, instead of 0.005 and 0.006 m of the bunny data. Using the local feature size to refine the point cloud data can reduce the number of point clouds, remove redundant data in the point cloud, and realize dynamic adjustment and adaptive reconstruction of nonuniform point clouds.
Introduction
With the rapid development of modern information technology and graphics application technology, the commonly used two-dimensional (2D) data cannot meet the needs of modern scientific applications. The method of quickly extracting and using real-world three-dimensional (3D) information is a new development goal. The results of laser scanning are displayed in the form of point groups. Effective processing of point group data is the focus of current research. Point group data processing technology mainly includes point group data acquisition, point group data preprocessing, and point group data surface reconstruction. In recent years, a large number of light detection and ranging (LIDAR) measurement devices have appeared, and the amount of point cloud data has increased dramatically. The preprocessing of point group data is the basis of point group data processing, which mainly includes several basic steps such as data compilation, multisite switching, point group segmentation, compression and simplification, and noise reduction.
Noncontact measurement makes it easy and high speed to acquire point groups, but errors are inevitable. Since the point group data are very dense, it is necessary to preprocess the point group data before surface reconstruction. Point group data reconstruction refers to obtaining multiple high-density discrete geometric point sets on the surface of the object by measuring instruments to restore the geometric model of the surface of the measurement object. This plays an important role in the fields of reverse engineering, smart city construction, and digital protection of cultural heritage, and has a broad application prospect and great research value.
Scattered point cloud data play an important role in the surface reconstruction process. Xi believes that in recent years, 3D laser scanning technology has become a hot spot for the investigation. Due to the lack of a monotonous point cloud data compression method, he proposed to use a combined algorithm to simplify the point cloud data. Curvature is one of the important geometric characteristics of 3D surfaces. He believes that the point cloud data can be reduced by the curvature of the surface. If the amount of point cloud data is large, the speed of surface fitting will be slower and will consume more time. He combined the two algorithms. First, he uses the minimum distance method to reduce the amount of point cloud data. Then, he established k nearest neighbor point cloud data. After that, he fits the point cloud to a nearby quadric surface and calculates the average curvature. After he sets the angle threshold, he will reduce the point cloud data based on the adjacent normal angle value and the threshold. Although his research is relatively comprehensive, it is not precise enough. 1 Su believes that the use of automated and efficient algorithms to perform ground LiDAR data segmentation is essential for 3D point clouds, and the ultimate goal of 3D point clouds is to model the segmented data. He proposed a novel segmentation technique. First, the scene is recursively divided into eight points or voxels through octree decomposition, and then a new split and merge framework using graph theory and a series of connectivity analysis is used to intelligently merge components into larger connected components. Although his method is very novel, but there are some loopholes. 2 Jrvelinen believes that line-of-sight (LOS) probability is an integral part of the radio channel model used for cellular network design and evaluation. He believes that the cell coverage can be estimated by using the path loss model probability in LOS and non-LOS scenarios. He proposed a new method to evaluate the probability of LOS by using point cloud data obtained by laser scanning. The LOS probability is derived for two new situations, namely, city open squares and shopping malls and office environment. He also proposed a universal exponential LOS probability model. Although his research has a certain guiding role, it is not comprehensive enough. 3 Awrangjeb believes that three steps are usually required to generate a straight building outline from a set of building points. First determine the boundary line that constitutes the outline of the building. Then trace a series of points from the edge to define the building boundary. Finally, a line is generated from the sequence of points and adjusted to form a regular building outline. He proposed a new solution for these three steps. By using the maximum point-to-point distance in the input data, the solution of the recognition step can correctly detect the boundary edges of any type of shape and, respectively, identify the holes inside the shape. The tracking algorithm he proposed divides the boundary edge into multiple segments, accurately obtains the point sequence of each segment, and then merges them when necessary. Although his research improves performance, it reduces accuracy. 4
In this article, the Delaunay triangle block generation algorithm is implemented in the point group data of 3D space, which reduces the requirements of reconstruction algorithm for the quality of point group data, improves the ability of the reconstruction algorithm to maintain the object characteristics, improves the efficiency of the reconstruction algorithm, and expands its scope of application. In the process of region growing method, the local curvature of the surface is represented by adjacent triangles and the combination of Delaunay mapping method can ensure the quality of mesh and improve the reconstruction speed. By calculating the inner angles of normal vectors of adjacent triangular meshes to determine the patches that remove overlapping points and segmentation, the workload can be greatly reduced.
Point Cloud Data and Surface Reconstruction
Scattered point cloud data
After the scattered point cloud is filtered and merged, the data points lose the relationship between the points in the first scan. These unorganized point sets only contain the 3D coordinate values of the object surface. If the corresponding topology information is not established, the efficiency of subsequent work will inevitably decrease. The basic task of 3D reconstruction based on point group is to reconstruct the point group data collected by the measuring instrument to generate a 3D solid-state model of the object. However, the measured point group data may be scattered or uniform, so there is no unified modeling process based on 3D reconstruction of point groups. 5
First, the measurement instrument is used to collect the point group data of the reconstructed object, and then the collected point group data are preprocessed. This includes deleting, simplifying noise points, and obtaining a point group model of the object. Finally, the texture is applied to the network to obtain a 3D solid model of the object. If the collected data points are not compressed, but used directly, the processing speed of the computer will decrease, the 3D reconstruction time will increase, and the computer resources will not be fully utilized. Therefore, under the condition that the main geometric feature information required by the measurement object on the subsequent processing link will not be destroyed, all the collected point group data are rationalized to effectively perform the subsequent point group processing work. 6
In the process of data acquisition, there are some unknown external noises, such as equipment interference, errors caused by staff errors in equipment operation, and rough surface of 3D laser scanning objects. To ensure the quality and efficiency of surface reconstruction, the noise of the point group must be removed before reconstruction. The 3D coordinates of the collected data can be expressed as follows:
Among them,
Surface reconstruction technology
The reconstruction of 3D laser point cloud data can be divided into three types according to different expressions: surface reconstruction by polygon mesh method, surface reconstruction by parameter, and surface reconstruction by negative function method. The surface reconstruction principle of the polygon mesh method is to use the geometric characteristics of the triangle segmentation mesh to express the surface information of the measurement object, and the triangle segmentation method is widely used. This algorithm can create topological connections on any surface, the surface performance is very intuitive and clear, and the efficiency of surface reconstruction is also very high, but the accuracy of surface reconstruction is very low, and the smoothness is not high. 8 The basic principle of parametric surface reconstruction is to create a specific function, map 2D parameters to 3D space, solve the function parameters, and make the approximate surface infinitely close to the original surface. The surface reconstruction principle of the negative function method is to use the construction of the negative function to adapt to the surface reconstruction. This algorithm is suitable for the smooth and closed surface of the model. The most commonly used algorithm is surface reconstruction based on the moving least-squares method. This algorithm has good fitting accuracy, a wide range of applications, and strong robustness. The negative function method is to reconstruct the overall surface of the mathematical model constructed from the 3D point group data, which can overcome the influence of noise, but the calculation amount of the fitting parameters is huge, and the requirements for the computer are also high.9,10
Although a large amount of high-precision point group data can be obtained through 3D laser scanning technology, due to the influence of various factors, deviation values and sparse large-scale noise data will inevitably be generated near the object point group. Not only does the amount of data increase, it also affects the calculation accuracy. Traditional point group noise removal methods are not suitable for large-scale noise removal, and so, methods to remove large-scale point group noise are being studied.11,12 When the uniform grid algorithm is used to simplify the point cloud, the details of the host point cloud will be lost. The curvature-based simplification algorithm can well retain the local feature points of the point cloud, but the disadvantage is that it simplifies the transition process in the continuous flat area and generates the area blank. Many simplification methods based on curvature use the average of all point curvatures as the lower limit of curvature, ignoring local differences in the point cloud. Second, we need to calculate the curvature of each point. This results in high time complexity and low efficiency. 13
Pattern recognition algorithm
Feature extraction is an important part of multisource feature pattern recognition, and the reliability of features is directly related to the performance of classifiers. According to different characteristics, the information of the research object can be provided from different angles. There are redundant and noisy data between features. If the features are directly connected into multisource features in series or parallel, the recognition accuracy is often not ideal. 14 Mutual information can describe the linear correlation and nonlinear correlation between variables, has strong resistance to noise, and retains the physical meaning of the feature itself. The evaluation of feature subsets not only includes the selection of features with high relevance to the target category, but also needs to meet the requirements of minimizing the redundancy between features, and select meaningful classification feature sets to improve classification performance.15,16
The initial sampling data obtained by the 3D scanning device only record the coordinates in the 3D space of each sampled data point, but do not record the connection relationship between the data points. Therefore, the first step in processing 3D point cloud data is to solve the normal vector. When determining the normal vector of sampled data points in the 3D processing software, it is usually necessary to establish a network model corresponding to the point cloud data. The normal vector of the vertex can be obtained by calculating the average value of the normal vector of all adjacent planes.
17
This method requires the input of the grid of the 3D point group first, and so, it is a global calculation method. However, due to the relatively rapid increase in data volume of currently available 3D point clouds, it is impossible to create a global grid. In addition, in many practical applications, grid generation is not necessary, and so, it is necessary to locally analyze the normal information corresponding to the sampling points. To ensure the accuracy of the subnodes, it is in general to perform cubic linear interpolation on the eight adjacent nodes around each sample point to define the vector field of the sample point.18,19 Therefore, the vector field defining the approximate indicator function is as follows:
In the formula,
Surface Reconstruction Experiment of Point Cloud Data
Experimental platform and data set
The experimental platform and data set built in this experiment are shown in Tables 1 and 2.
Experimental platform
Data set
Feature point extraction and screening
Extraction
Extract candidate feature points from surface changes. Because the threshold of the surface change is too small, the feature points and their nearby points are regarded as candidate feature points, and the candidate feature points are distributed in a narrow frequency band. The increase in the threshold of the surface change will cause a part of the feature points to be lost, and the extraction fails. The candidate feature points extracted in this article are all in the feature area of the point group, and the number is greatly reduced compared with the original point group, and so, the feature points can be screened correctly and efficiently. 20
Screening
Feature points and nonfeature points are mixed and distributed in the narrow area on both sides of the planning line. This article uses the normal clustering of the point group and the plane to fill in the blanks to select feature points from the candidate feature points.
Establish the kd tree structure of the point group data, and obtain each candidate feature point p in turn.
Cluster the points near k according to the correct normal vector. After the consistency adjustment of the method and accurate method calculation, the normal vectors on the same surface are almost parallel. Considering that the plane is a curved surface and the point cloud contains noise, set the angle threshold δn of the normal vector. If the angle of the two points near k is less than δn, then they will be clustered into the same category, otherwise they will not be classified as the same type.21,22
According to the principle of least squares, the plane is fitted to each type of point cloud generated by the cluster.
Set the distance threshold δd, calculate the distance d from the point p to the least-squares fitting plane, if d is less than the distance threshold, then the point p is considered to belong to the plane, otherwise it does not belong to the plane. 23
Point cloud data segmentation
In this experiment, the region growing method is used to segment the point cloud data. When a region growth strategy is formulated to grow the grid in a reliable way, and effective topology operations and triangulation standards are designed for each step of grid growth, the proposed algorithm has different sampling rates and various data storages of complex geometry can correspond to layout and/or topology. The region growing method is used to construct the initial mesh. In the construction process, it is not necessary to use the normal vector of point cloud data to separate, but to define the angle of normal vector of adjacent triangular mesh to constrain, and finally separate the relatively flat area.24,25
Surface reconstruction
Calculate the parameter value of the scattered point
Using the projection parameterization method, the scattering points in the domain are projected onto the surface. The parameter value of the projection point is regarded as the parameter value of the scattering point.
Surface fitting
In theory, the method of controlling the number of vertices is smaller than the number of scattered points contained in the area, and the matrix is correct. However, if the number of control points is too large, the fluctuation of the fitted surface will be larger, and the quality of the fitted surface will be worse. Too many control vertices will increase the fitting error. Therefore, the selection of the number of control vertices must follow the matrix rules to ensure that the surface does not produce excessive fluctuations. 26
The boundary is continuous
By resampling the boundary area and using a uniform node vector, it is ensured that adjacent surfaces have the same node vector as the same sampling point on the common boundary, so that the adjacent coboundary curves are equal, and the location continuity of adjacent patches is ensured. All sampling points on the common boundary have tangent vectors in two directions along the boundary. The direction of the bisector on both sides of the two tangent vectors is taken as the boundary tangent vector direction of the sampling point. The length of the pattern is the length of the node line.27,28
Analysis of the Effect of Surface Reconstruction Based on Scattered Point Cloud Data
Comparison of surface reconstruction effects
The initial registration time and accuracy of bunny data are shown in Table 3. The calculation result of the RANdom SAmple Consensus (RANSAC) algorithm mainly depends on the following two parameters. One is the distance threshold from the point to the model. The point whose distance to the model is greater than the threshold is regarded as an outlier point, otherwise it is an inside point. The threshold must be set artificially according to different data. This parameter directly determines the size of the model parameter set and affects the performance of the entire algorithm. The second is the number of calculation iterations, which is related to the proportion of internal and external sample points in the sample. This parameter affects the number of model checks for the remaining sample points, and directly affects the efficiency of the algorithm and the accuracy of the model parameters that can be determined. By using two feature description operators, point feature histograms (PFH) and fast point feature histograms (FPFH), the three sets of data are used for initial registration experiments, the same parameters are set for the algorithm, and the experimental results are compared. Experiments show that both types of algorithms can complete the initial registration of point cloud data, and the speed of initial registration using method two (FPFH operator) is significantly better than that of method one (PFH operator). After repeated experiments, the normal vector and the search radius of the feature descriptor are finally set to 0.01 and 0.02 m when calculating the feature descriptor, instead of 0.005 and 0.006 m of the bunny data. It can be seen from the final registration result that for the robot point cloud, the registration effect of the two operators is worse than that of the bunny data, and the registration accuracy of method one is higher than that of method two. Through the above three experiments, the efficiency of the FPFH operator in the initial point cloud registration is verified. At the same time, for the point cloud data with obvious curvature characteristics, the FPFH operator has a good description effect for the point cloud feature information, and can achieve high registration accuracy. However, in the actual registration work, the initial position of the point cloud to be registered, the proportion of the overlapping area of the point cloud, the geometric characteristics of the overlapping area of the point cloud, and the parameter setting will affect the registration results. Therefore, in the actual registration work, using the FPFH feature description operator for rough matching may not obtain more accurate registration results than the PFH operator.
Time and accuracy of initial registration of bunny data
FPFH, fast point feature histograms; PFH, point feature histograms.
To verify the effectiveness and stability of the algorithm, this article tests the sculpture point cloud data model, and the effect comparison before and after filtering is shown in Figure 1. It can be observed from the figure that the point cloud simplification filtering by this algorithm can effectively guarantee the shape characteristics of the point cloud, and has a good effect on the reduction operation of large-scale point cloud data. After filtering, the amount of point cloud data is significantly reduced, and the processing time for 100,000 level point cloud data is basically completed in about 3S, and the processing efficiency is very efficient.

Comparison of the effect before and after filtering of sculpture point cloud data model.
Table 4 shows the comparison of time consumption of point cloud model reconstruction methods. It can be seen from the table that the reconstruction time increases as the number of data points increases. Compared with the traditional algorithm, although there is no advantage in the calculation speed, the classification of the data enables the algorithm to efficiently and accurately reconstruct the triangular mesh of the point cloud, which has certain engineering significance. Compared with the Poisson algorithm, when the number of point clouds is small, the efficiency of this algorithm is slightly lower, but as the number of point clouds increases, the time consumption of the Poisson algorithm increases sharply, and the time consumption of this algorithm is less than that of the Poisson algorithm. Compared with the micro processor unit algorithm, the algorithm in this article consumes the same time. The time-consuming algorithm in this article consists of three parts: normal calculation, feature reconstruction, and surface reconstruction. Because the nonfeature surface is reconstructed by crust algorithm and there are a lot of Delaunay subdivision calculations, the reconstruction time of this part is the most time-consuming, accounting for about half of the total algorithm time. However, the efficiency of normal calculation and feature reconstruction is higher, and if combined with a more efficient reconstruction algorithm, the total time consumption of this algorithm can be further reduced.
Comparison of time consumption of point cloud model reconstruction methods
Influence of scattered point cloud data on surface reconstruction
At present, there are many ways of mesh division, but the basic idea of division is the same. The key is to obtain the coordinates of regular grid points, construct regular section point set sequence, and then construct B-spline surface by skin method. The traditional fitting method can be used to fit the grid value point set. First, a group of section curves are fitted or interpolated in the U direction, and then, the spline surface is generated by fitting or interpolating in the V direction. In this article, the mesh value points of the surface are obtained by quadric surface fitting, which is close to the original scattered point cloud data. The fitting surface approximates the original model and meets the experimental requirements. If it is necessary to make more accurate approximation to scattered data, the surface obtained by fitting can be used as the datum plane, and further least-squares surface fitting can obtain more accurate results. An algorithm that can quickly extract the edge of scattered point cloud data is used to extract the edge of surface. First, the algorithm establishes the grid topology structure for scattered point cloud data, which makes it possible to quickly exclude nonedge meshes, thus reducing the number of judgments and saving a lot of alpha shape judgment time. Through in-depth theoretical research on the least-squares fitting method, the scattered data are transformed into regular surface mesh value points. Then, the interpolation method of B-spline curve and surface is discussed in detail. The steps of surface interpolation are similar to those of curve interpolation, and they also need to go through the parameterization of shape value points and inverse seeking of control points, but the parameter direction should be determined first in B-spline surface interpolation, so that the interpolation process of B-spline surface can be divided into two stages. The interpolation reconstruction of B-spline surface can be completed by interpolating two-direction B-spline curves. By using the fast algorithm of solving linear equations of cyclic coefficient matrix, the control points of interpolation equation are inversely solved in algebraic form, which greatly improves the efficiency of surface reconstruction in this article.
The 3D reconstruction data of different models are shown in Figure 2. It can be seen that the algorithm in this article has a relatively long time in segmentation and optimization, and has a more obvious reduction in the internalization time. The main reason is that in the process of segmentation and optimization, the point cloud data should be traversed circularly, while in the process of triangulation, the main triangulation work is completed in 2D space through the 2D mapping method, which greatly reduces the time of internalization. In plane triangulation, the triangular mesh is mainly used to triangulate 2D interior point set, while in spatial triangulation, spatial tetrahedron is used to triangulate point cloud data in 3D world. In addition, computational geometry algorithms library (CGAL) has also withdrawn from 2D triangulation, which can return planar data to 3D space and can be calculated together with spatial triangulation. From the mathematical point of view, the triangulation algorithm proposed by the CGAL algorithm library can be regarded as a subset of convex set covering point cloud data, which also shows that the triangulation method provided by CGAL geometry library can deal with the related areas covered by the point cloud data set, not only limited to the inner region but also can expand all the vertex sets of the knife. Therefore, CGAL can often provide faster methods and higher quality operation results for point cloud data sets and fast search and location operations.
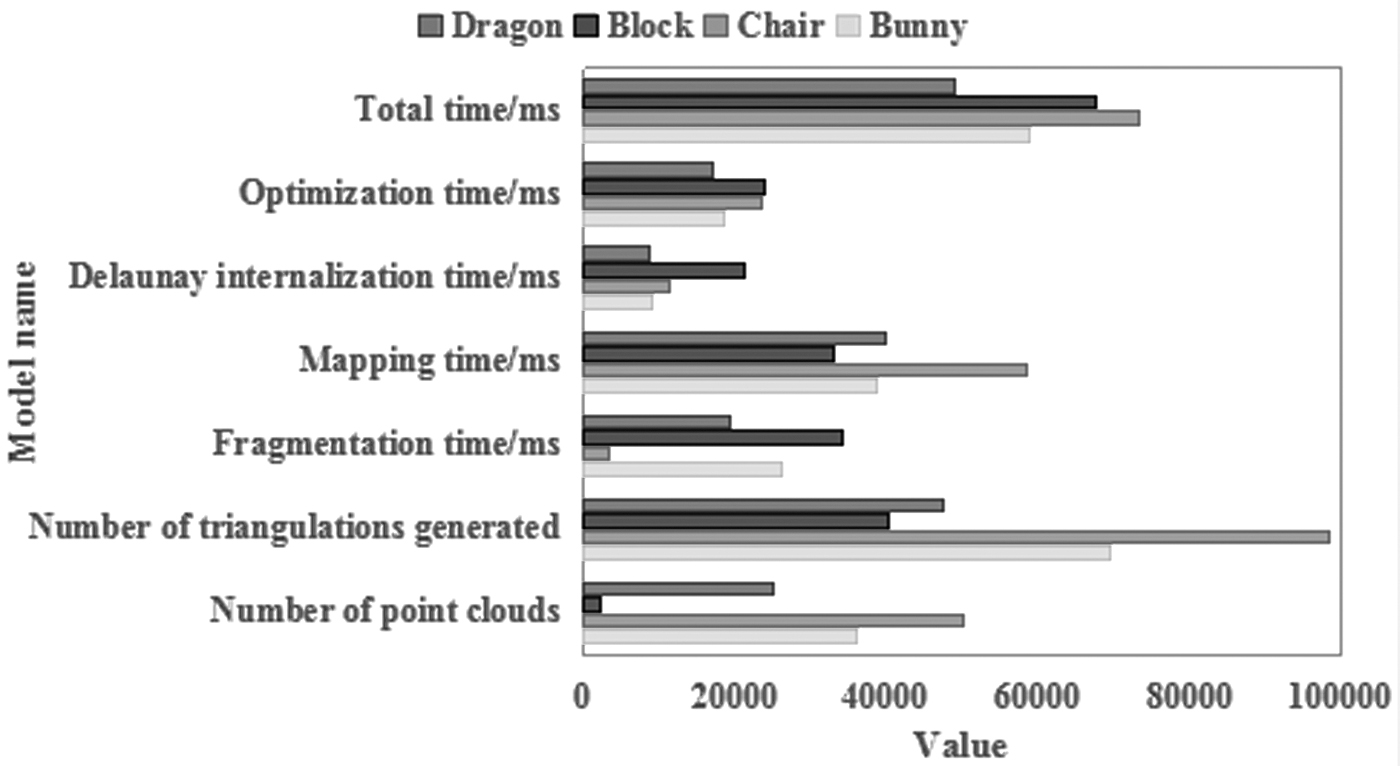
Three-dimensional reconstruction data of different models.
Error analysis
The prediction error is shown in Figure 3. It can be seen very intuitively from the figure that there are certain differences between the two surface models. By comparison with each other, the improved B-spline reconstruction surface smoothness is not ideal and time-consuming, while the improved back propagation (BP) neural network algorithm has better surface smoothness, faster speed, and higher accuracy. For the B-spline reconstruction surface in this article, it is found through repeated experiments that to meet the accuracy of the reconstructed surface to meet the application requirements, it is necessary to repeat the meshing and the least-squares solution will increase, which makes the calculation efficiency low. Therefore, the B-spline surface reconstruction algorithm based on the least-squares method can only use a small amount of point data for surface fitting, but this will cause more detailed information of the target to be measured to be missing; and for the improved BP neural network point proposed in this article. In the cloud surface algorithm, the amount of point cloud data has a lower impact on the computing process. When the amount of point cloud data is larger, the accuracy of the implicit surface obtained is higher. The accuracy of the two methods meets the required application requirements, and their accuracy ranges can be controlled in millimeters. The implicit surface reconstruction based on the moving least-squares method has good fitting accuracy, wide application range, good local processing, but complex and inefficient global processing, and so, many improved methods, such as robust multiple listing system, greatly improve the processing effect; the implicit surface reconstruction based on radial basis function has a better global smooth processing effect. In particular, the hole repair also has a good effect, but it is difficult to take into account the topological relationship of the object; the implicit surface reconstruction based on Poisson function has a good global smoothing effect, which is easy to denoise and repair holes, but it is easy to be affected by the normal vector of point cloud data.
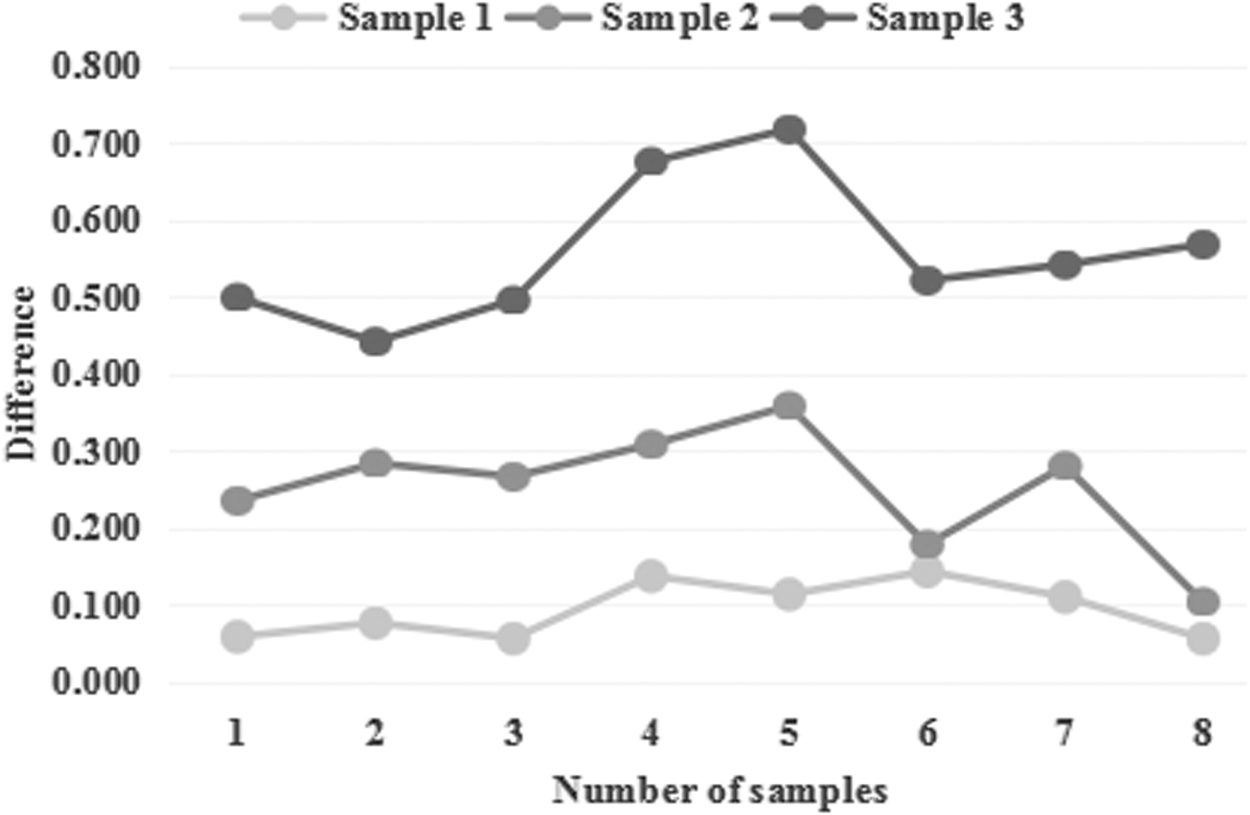
Forecast error.
The physical sample has been digitized, and a series of sampling points are used to describe the physical sample. Therefore, the error between the physical sample and the surface model is the error between the sampling point and the surface model. The error between a point and a surface can be described by the shortest distance from a point to the surface in the same coordinate system. Therefore, to measure the error between the physical sample and the surface model, it is enough to calculate the shortest distance from all sampling points to the surface model. Of course, when the distance between all sampling points and the surface is less than the given allowable error, the reconstructed surface can be considered qualified, otherwise, the surface model cannot accurately describe the actual sample. The surface area change rate caused by the random simplification method is the highest, followed by the curvature simplification method. The regional simplification method used in this article has the lowest rate of change of the model surface area after simplification, with a change rate of 0.43%, indicating that this method hardly changes the original model surface information. The constructed model is closer to the original model, and the point cloud simplification effect is better. In summary, this article evaluates the quality of the simplification of the regional point cloud from three aspects. Compared with the curvature method and the random method, the regional simplification method proposed in this article retains as much as possible the characteristic information in the original point cloud. Points: eliminating a large number of points in the flat area, the simplification effect is obvious, and the simplification rate is high. The model established by the simplified point cloud describes the original terrain more accurately, and the surface area difference is smaller, which is almost indistinguishable from the original model. It proves that the regional simplification method proposed in this article can be used to simplify the 3D laser point cloud data, and the simplification effect better.
Data analysis before and after surface reconstruction
The comparison of model parameters before and after surface reconstruction is shown in Figure 4. It can be seen from the figure that the algorithm has a good overall reconstruction effect on the point cloud model, and there is no phenomenon such as fracture or folding. For standard Bunny point cloud data, both methods show good reconstruction results. The Crust algorithm is used to achieve a good reconstruction effect on the three sets of experimental data, and the triangle meshes generated are uniform in size. In terms of reconstruction efficiency, this algorithm is higher than that of Geomagic Studio. In addition, the Crust algorithm can avoid the operation of repairing holes. Since most of the time of the traditional internet content provider (ICP) algorithm is wasted on querying corresponding points, the efficiency of the improved ICP algorithm is higher than that of the traditional ICP algorithm, and the normal vector threshold condition is added to eliminate the wrong point pair, which improves the accuracy of the algorithm. The Crust algorithm has low requirements for the quality and shape of the point cloud, including point cloud density (point spacing), dispersion (uniformity), and whether the surface is complete, and the degree of automation is relatively high, without excessive manual intervention, avoiding many similar types of algorithms or related software to fill holes or process intersecting patches and other operations.
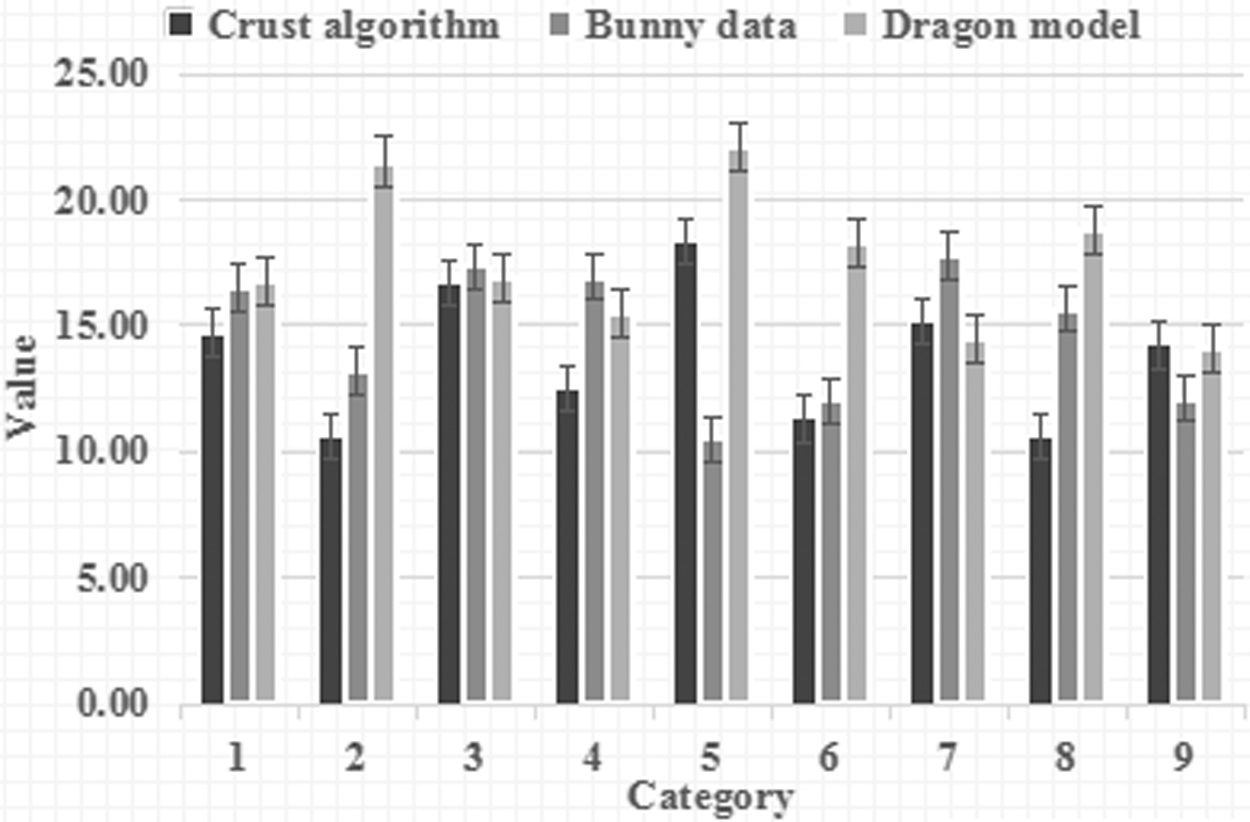
Comparison of model parameters before and after surface reconstruction.
By adjusting the parameters according to the characteristics of the point cloud model, the ideal reconstruction effect can be achieved. The maximum inner angle threshold and the minimum inner angle threshold are used to grow qualified triangles; the number and range of the nearest neighbor points that can be searched ensure that the nearest neighbor search range is a local neighborhood. The larger the two parameters are set, the longer the search time is; the edge length threshold is to ensure the growth of small triangles, which is not recommended to be set too large, because large triangles or holes will appear; the dihedral angle threshold ensures that the optimal triangle is selected. The larger the threshold value, the smoother the triangular mesh will be. It can be clearly seen from the figure that the results of mesh reconstruction can maintain the basic shape of table model. The triangular mesh grows evenly, and there are no more holes, and there are basically no disordered triangles. In the sharp feature areas such as the edges and corners of the table, the excellent triangles can still be grown, which directly reflects the detailed features of the model. For dense original point cloud model, first simplify it and then reconstruct the mesh, which can speed up the reconstruction speed, and the reconstruction effect of this algorithm is better. Compared with the original table model, the number of point clouds of the simplified table model is greatly reduced, and the reconstruction time is also reduced. Moreover, the reconstruction quality of the simplified table model is close to that of the original table model, which achieves a better reconstruction effect.
The comparison of wind turbine blade bias between two different reconstruction systems is shown in Figure 5. The maximum deviation of the wind turbine blade model reconstructed by ImageWare software is 4.9996 mm, which is higher than the maximum deviation of 3.8856 mm of the wind turbine blade model reconstructed by the system in this article, and the positive and negative average deviations of the reconstruction system in this article are within 1 mm, which shows that the reconstruction software system in this article has a better reconstruction performance and can reconstruct better surface quality, proving the effectiveness of the system in this article. Although the bilateral filtering algorithm can make the point cloud model retain certain geometric features, it will produce an over smoothing phenomenon. In contrast, trilateral filtering has a good smoothing effect on noise. The trilateral filtering algorithm based on normal vector correction is adopted in this article. On the basis of modifying the normal vector, the position of the noise is adjusted, and more geometric features are retained while denoising. Using the bilateral filtering method to denoise point cloud is a simple idea and has a high processing efficiency. It can keep the surface features of point cloud appropriately. However, if there are large-scale noise points in the point cloud, using this method will produce over smoothing, which cannot effectively maintain the surface details of the target, thus affecting the denoising effect. In outliers, the drift points are first processed, that is, the sparse and scattered points floating above the point cloud, which are far away from the main body of the point cloud. This kind of outlier is relatively sparse, and the method similar to radius filtering can be used, that is, in the process of point cloud denoising, the number of adjacent points within a fixed range of each point can be limited to be greater than the minimum threshold.
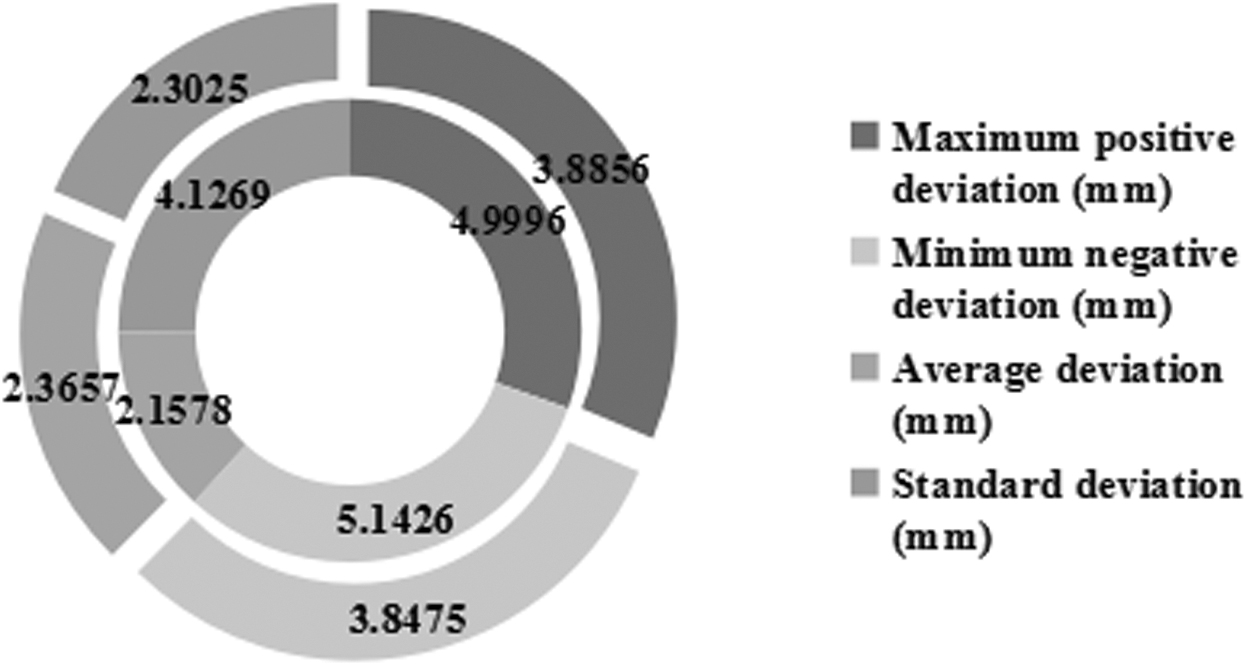
Comparison of wind turbine blade deviations of two different reconstruction systems.
Conclusions
This article mainly studies the surface reconstruction pattern recognition technology based on scattered point group data. Combining the point group data simplification method of curvature and normal vector direction, first, the simplification of the global point group data is converted to the local simplification of the intraclass point group through the point group clustering, and the calculation amount of the algorithm is greatly reduced. To simplify the point group data in the class, a feature factor to evaluate whether the points in the class are feature points is proposed, which can keep the detailed features and geometric shapes of the point groups more appropriately. Based on the geometric characteristics of the point cloud data, the concept of curvature is introduced, the Gaussian curvature and the average curvature of the point cloud data are calculated, and the curvature shortest distance algorithm based on the curvature estimation and the shortest distance algorithm is proposed. According to the curvature, the point cloud data are divided into high curvature part and low curvature part, and the point cloud data are simplified by different distance thresholds.
In this article, we study the block technology of scattered point group data. First, the scattered point groups are classified and identified according to the combination of the mean curvature and Gaussian curvature symbols, and the surface type to which each point belongs is determined. The feature points are extracted by the adjacency angle and curvature extreme method, and the region growing method based on feature constraints is used to complete the block segmentation of the point cloud data. The results of the block segmentation basically conform to the structural characteristics of the model. First, use the RANSAC method to filter the deviation value, then use the simplified method in this article to make the simplified remaining points fit to the sphere, and finally use the Delaunay precision method to extract the reconstructed surface in the form of a curved triangular mesh. The results show that the method used in the experiment can effectively remove the deviation and noise, so as to complete the surface reconstruction.
The simplified point group data set completely retains the sharp edge data and the shape of the smooth area. This algorithm does not simplify all the point group data, but preserves the edge points, focuses on the simplification of the points in the smooth area, improves the efficiency of simplification, and completely maintains the geometric characteristics of the simplified object. In the area growth algorithm proposed in this article, all free points from the 3D search area to the current front end are filtered by triangulation, and are not limited to points with a fixed distance from the current boundary. Then, the algorithm can use a series of optimization measures to restore the high-quality reconstruction model under different sampling ratios. These optimization measures can eliminate some bad data points and the trihedron of the reconstruction model.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the Natural Science Foundation of Guangdong Province #2014A030307038.