
Abstract
Maintaining independent mobility is fundamental to independent living and to the quality of life of older people. Robotic and sensor technologies may offer a lot of potential and can make a significant difference in the lives of older people and to their primary caregivers. The aim of this study was to provide a presentation of the methods that are used up till now for analysis and evaluation of human mobility utilizing sensor technologies and to give the state of the art in robotic platforms for supporting older people with mobility limitations. The literature was reviewed and systematic reviews of cohort studies and other authoritative reports were identified. The selection criteria included (1) patients with age ≥60 years; (2) patients with unstable gait, with or without recurrent falls; (3) patients with slow movements, short strides, and little trunk movement; (4) sensor technologies that are currently used for mobility evaluation; and (5) robotic technologies that can serve as a supporting companion for older people with mobility limitations. One hundred eighty-one studies published up until February 2017 were identified, of which 36 were included. Two categories of research were identified from the review regarding the robot and sensor technologies: (1) sensor technologies for mobility analysis and (2) robots for supporting older people with mobility limitations. Potential for robotic and sensor technologies can be taken advantage of for evaluation and support at home for elder persons with mobility limitations in an automated way without the need of the physical presence of any medical personnel, reducing the stress of caregivers.
Introduction
P
Difficulties in mobility are often the first sign of functional decline 3 and their incidence is ∼35% of adults aged over 70 years and 72% of people aged over 80 years. 4,5 Mobility limitations are associated with loss of autonomy, reduced quality of life, increased fall risk, repeated hospitalizations, and premature death. 6 Furthermore, longitudinal predictors of mobility decline were shown and included increasing age, 7 reduced leg strength, 8 –10 obesity, 11 poor self-rated health, number of morbidities, and psychosocial factors. 12
Walking is the fundamental mobility task for human life and is a complex neuromotor activity. 13 Moreover, with advancing age, maintaining mobility and walking capability may be made vulnerable by the increasing risk of physical and sensory impairments. 14 It was shown that persons walking slower than 1 m/s are likely to be limited in energy needed for self-care, and persons walking faster than 1 m/s may be expected to have the capacity to perform household activities. 15 Mobility is widely measured through self-reports such as the ability to walk 400 m. 10,16 –18
Maintaining independent mobility is fundamental to independent living and to the quality of life of older people. 19
Robotic and sensor technologies may offer a lot of potential and can make a significant difference in the lives of older people and to their primary caregivers. Indeed, it has been noted that these technologies should be part of a home package and should be provided in a thoughtful, sensitive, and ethical way. 20
The objectives of this article were to provide a presentation of the methods that are used up till now for analysis and evaluation of human mobility utilizing sensor technologies and to give the state of the art in robotic platforms for supporting older people with mobility limitations.
Methods
The PRISMA guidelines for this systematic review were followed. 21 PubMed, Embase, CINAHL, ScienceDirect, and Scopus were searched up until February 2017.
The search queries included the following terms (Robotic technologies OR Robotics AND Sensor technologies OR Sensors AND older OR elderly) combined with terms to determine the outcomes of interest (mobility AND [disability OR decline OR disorders] OR Walking OR Gait) and were limited to human studies.
A single reviewer examined the abstracts retrieved by the electronic search to identify articles that met the inclusion criteria and have to be fully reviewed.
The inclusion criteria included research articles inclusive of (1) patients with age ≥60 years; (2) patients with unstable gait, with or without recurrent falls; (3) patients with slow movements, short strides, and little trunk movement according to the description given by Snijders et al. 22 ; (4) sensor technologies that are currently used for mobility evaluation; and (5) robotic technologies that can serve as supporting companion for older people with mobility limitations. Exclusion criteria were (1) no English language (as we lacked resources for translation) and (2) no mobility limitations.
As shown in Figure 1, a total of 181 articles were identified, of which 65 duplicates were deleted. After reviewing abstracts, 70 articles were excluded on the basis of the aforementioned exclusion criteria. Further 10 articles were excluded after more in-depth examination (on the basis of the same inclusion/exclusion criteria). Thus, 36 published studies were eligible for the current systematic review as shown in Tables 1 and 2.
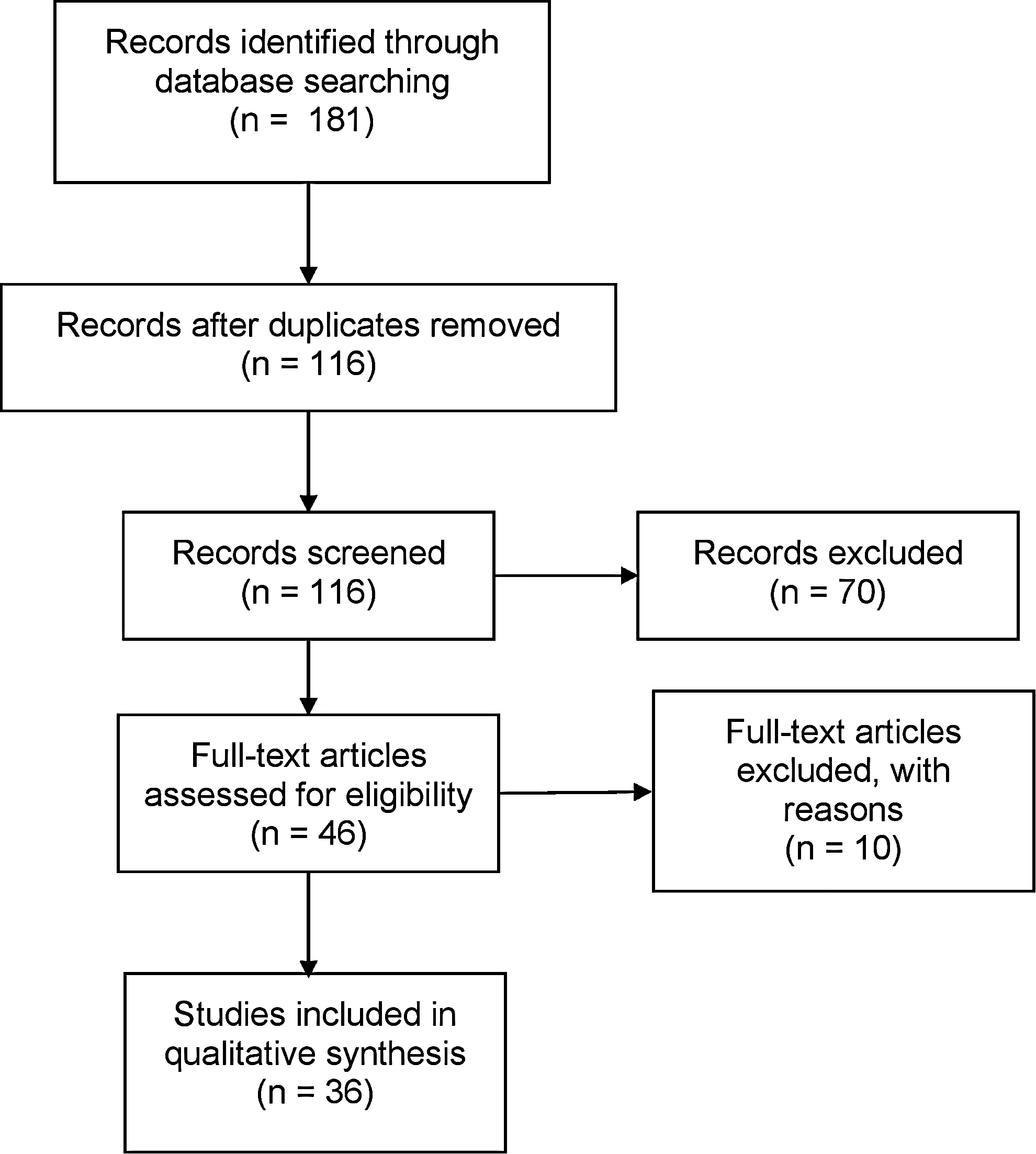
Flow diagram outlining the selection procedure to identify articles that were included in the state of the art sensor technologies for mobility analysis and robotic platforms for supporting older people with mobility limitations.
3Ds, 3D sensor; AM, ambulatory monitoring; CA, clinical application; EMG, electromyography; ETS, electromagnetic tracking system; GA, gait analysis; HAR, home assistant robot; LDA, linear discrimination analysis; MS, motion sensors; NWS, necklace wearable sensor; PCA, principal component analysis; PD, Parkinson's disease; PoCM, point-of-care mobility monitoring; PT, postural transitions; RSAU, representative skeletal action unit; ST, sensor technology; TASS, temporal alignment spatial summarization; UO, user opinion; WS, wearable sensors.
APR, assistant personal robot; ARM7, advanced RISC machines 7; HAL, hybrid assistive limb; HSR, human support robot; IRT, information and robot technology; LED, light-emitting diode; LCD, liquid crystal display; OPPR, open platform for personal robotics; PAW, power-assisted wheelchair; ROS, robot operating system.
An inductive approach to the analysis was used.
23
The Results section was divided in two categories: (1) Sensor technologies for mobility analysis (2) Robots for supporting older people with mobility limitations.
Coauthors provided a detailed summary of each study, including its strengths and weaknesses, as well as an overall review of the category. 24,25 Through this process, the following items were systematically extracted from the articles: approach, methodology, transparency, strengths, and weaknesses. Then, these were organized according to theme to provide an overview of the state of the field as a whole.
Results
Sensor technologies for mobility analysis
The potential sensor technologies that assess the mobility of older people are shown in Table 1.
The methods used in recognition and analysis of human mobility follow three different approaches: image processing (IP), floor sensors (FS), and sensors placed on the body. Progress in new technologies has led to the development of a series of devices and techniques, which allow for objective evaluation, making measurements more efficient and effective and providing specialists with reliable information.
The technological devices used to study human mobility can be classified according to two different approaches: those based on nonwearable sensors (NWSs) and on wearable sensors (WSs). There is also a third group of hybrid systems that use a combination of both methods. 26,27 NWS systems can be classified into two subgroups: (1) IP and (2) FS. IP systems capture data on the subject's gait through one or more optic sensors and take objective measurements of the different parameters through digital IP. 28 Analog or digital cameras are the most commonly used devices. Other types of optic sensors such as laser range scanners, infrared sensors, and time-of-flight cameras are also used. There are two systems within this category: with and without markers. The FS systems are based on sensors located along the floor on the so-called force platforms where gait information is measured through pressure sensors and ground reaction force sensors, which measure the force exerted by the subject's feet on the floor when he/she walks.
The WS systems use sensors located on several parts of the body, such as feet, knees, thighs, or waist. Different types of sensors are used to capture various signals that characterize the human gait. These include accelerometers, gyroscopic sensors, magnetometers, force sensors, extensometers, goniometers, active markers, and electromyography, etc.
Several studies are related to the use of WS systems for human mobility detection and analysis while studies refer to the case where optic NWSs are used for that same purpose. 29 –34
In a study, a miniature hybrid sensor is used, which contains a 3D-MEMS accelerometer and a barometric pressure sensor, and is worn as a necklace by the elder person. 35 After passing the sensor signals though a low pass filter, the smoothed signals are fed to each of the movement and posture detection modules to detect activities such as (1) active period, (2) sit/stand transfer, (3) walking, and (4) lying.
On the other study,
34
the problem of automated quantitative evaluation of musculoskeletal disorders using a 3D optic sensor is addressed. This enables a noninvasive home monitoring system that extracts and analyzes the subject's motion symptoms and provides clinical feedback. In this research, the 3D sensing technology used was the Microsoft Kinect RGB-D sensor. Furthermore, spatiotemporal analysis of noisy, high-dimensional time series data was performed. The general pipeline of this method includes the following steps: Extract the high-dimensional skeleton data from the Kinect depth video stream. Temporal segmentation of time series data based on the intrinsic periodicity. Temporal alignment of all segmented time series sequences. Spatial summarization to generate the final consistent representation.
Robots for supporting older people with mobility limitations
According to the previous sections, any robot that could somehow encapsulate one or more of the aforementioned sensor technologies could be used for evaluation of the mobility of a human subject, although some of those technologies are impossible to implement on a robotic technology, such as WS and FS. Therefore, we were focused here on robotic platforms that belong to the category of assistive robots to support older people with mobility limitations and at risk of exclusion 36 and of course have the necessary sensors for mobility evaluation (optic in these cases). We divided this wide category of robots to the following subcategories: 4 humanoid robots, 2 exoskeletons, 1 tool-like robot, 1 rehabilitation robot, 13 service robots, and 5 companion-type robots–pets (Table 2).
Humanoid robots
The main characteristic of humanoid robots is anthropomorphism and high mobility, with some of them being able to perform a variety of physical movements and most of them act as companions too. They not only belong to the wider category of social robots but could also fit in the companion-type category too. 37 Nowadays, humanoid robots are used as a research tool in several scientific areas. Although anthropomorphic features should be carefully designed, 38 anthropomorphism itself is considered a useful attribute in inclusion and interactive sessions as it facilitates easier interactions and better communication. 39
There is evidence that some advanced humanoid robots such as Partner Robots and the Bandit-II have been used to support the elderly care. 40,41
These are research robots that are expensive, not yet commercially available, and their development is still in progress. They all use Linux-based operating systems and most of them are compatible with Robot Operating System (ROS). Due to their characteristics as humanoid robots, they could be used to support the elderly and people at risk of exclusion.
Finally, there exist some humanoid robots such as NAO and Nimbro-OP. These are financially affordable and commercially available (from 7.000€ to 22.000€) anthropomorphic robots that are used mainly for research purposes. They are around 45–80 cm tall and weigh from 3 to 5 kg. They all use Linux-based operating system and are compatible with ROS. NAO has already been used to support autistic children 42 and has been used in an assistive living environment to support the elderly. 43 There is also recent study 44 that claims Nimbro-OP has been used as a companion robot to support the elderly. They all have optic sensors, so theoretically they can be used for human mobility and gait evaluation with the right software.
Exoskeletons
Several powered exoskeletons are currently available and in clinical use. Some evidence exists to support their utility for rehabilitation in stroke and other acquired brain injuries. 45 The current systems have many limitations and a myriad of differences exist in their engineering concept, design, control mechanism, and performance. Assistance of the exoskeleton is perceived to reduce less muscle fatigue compared with normal walking. 46 Studied exoskeletons for older people with reduced mobility are the following: Superflex 47 and Hybrid Assistive Limb (HAL). 48 Rather than imagining the humanoid robot as a plastic person that has two arms and two legs, the exoskeletons, as Superflex, propose that the robot could be built into everyday garments. Superflex's elastic muscle technology provides for the combination of a wetsuit and kinesio-tape. The suit's sensors are supposed to be able to track the posture and movement of the body, and rapidly process data to send a motor assist when the wearer is leaning forward in a chair, getting ready to stand up, or even starting to raise their arms above their head.
Regarding the HAL, studies have evaluated the ability of this exoskeleton to provide task-specific locomotor training in individuals poststroke as well as a clinical device to be used in therapy sessions for persons with limited mobility from stroke or other musculoskeletal diseases. 48,49 In these studies, data indicated that the HAL is capable of improving subjects' walking 49 and torso posture, as well as enhancing treadmill training, based on 10 m and 6-minute walk tests, lower extremity motor scores, and the timed up and go test. 48 The HAL was also reported safe when used alongside an inpatient rehabilitation program. 49
Exoskeletons appear to be a step in the right direction to allow patients to walk in various environments, on different surfaces, and in some cases under their own control (i.e., patient-controlled gait triggering). 45
Tool-like robot
Among the tool-like robots for human mobility, only the power-assisted wheelchair (PAW) is suitable for older people. Wheelchairs that have enhanced locomotion of people with muscular weakness or paralysis still can be improved using various assistive technologies, for example, electric wheelchairs have been developed and widely used for enhancement of the maneuverability and safety of people. The PAW 50 is a relatively new type of wheelchair, which is equipped with torsion sensors to measure force applied on rims by a human and provides the assistive torque based on the measured force. With this propelling process, the user still can involve with the propulsion of the wheelchair, while the assistive torque can relieve the user's propulsion effort. This PAW is a case of human–machine interface and requires an adequate control of assistive torques to interact with a human without confliction. 50
Rehabilitation robot
To regain normal mobility function as much as possible, gait rehabilitation such as locomotion training is commonly employed as therapy. In this view, the walking-aid robot is significantly useful. 51 It is an assistive device for enabling safe, stable, and efficient locomotion in elderly people. A study proposed a reinforcement learning-based shared control algorithm for intelligent walking-aid robot to address existing control problems in cooperative walking-aid robot system. 52 By dynamically adjusting user control weight according to different user control efficiencies and walking environments, the robot can improve the user's degree of comfort when using the device and automatically adapt to user's behavior.
Service robots
A service robot is a robot that performs useful tasks for humans or equipment excluding industrial automation application. 53 There exists a plethora of service robots, some actively used in research and some employed in environments where their utilization targets are hotels, hospitals, geriatric centers, or even homes. 54,55 Amigo, 56 ASTROmobile, 57 Care-o-bot, 58 Enon, 59 Carebot, 60 Human Support Robot (HSR), 61 IRT 55 home assistant, REEM H1, 62 PR2, 63 SmartPal V, 64 Twenty One, 65 UFES Smart Walker, 66 and Assistant Personal Robot (APR) 67 are all service robots used to support older people. While their use could see various different employment scenarios, their main purpose revolves around servicing human users, disabled or not. Some of those are commercially available, some are not, some are financially affordable (e.g., Carebot), and some are prohibitively expensive (e.g., PR2, Care-o-bot).
Due to their nature and their role, service robots could potentially see some benefits in inclusion as they can offer both a supportive role for physical needs and cognitively and educationally challenge their user or users. Where they lack in mobility (due to using tracks or a platform with wheels rather than legs as most humanoids do), they make up with their wide range of operations, long battery life, computational power, and long research history. Technically, most of the service robots mentioned above operate on a Linux operating system and are compatible with ROS. They all have optic sensors, so theoretically they can be used for human mobility and gait evaluation with the right software.
Companion-type robots: pets
A different type of robot, therapeutic pet and social assistant in some form or another, aims to provide companionship and assist their user. Most are normally simulated animals and their assistance is emotional or cognitive to their user rather than physical (in which case, please refer to service robotics). Such robots are Paro 68 Pleo, 69 Buddy, 70 PaPeRo Petit, 71 and iCat 72 and can be used for inclusion purposes. They mostly rely on communication, interactions, and emotional responses from their user. However, their embodiment is usually restricted due to being represented as animals or pets. These robots are usually cheaper. They all have optic sensors (cameras), so theoretically they can be used for human mobility and gait evaluation with the right software. Finally, there are evidences that they can improve the quality of life of the elderly. 73
Conclusion
As the older population expands, technology applications have the potential to support aging in place for elderly, improving quality of life and reducing healthcare costs.
With advancing technology, sensors and robots may have the capabilities to support older adults in gait measures and mobility. The purpose of this article provides the state of the art of the area of robotic and sensor technologies that could be used for evaluation of the mobility and gait of an elder human.
From our search, we identified 35 studies regarding sensors and robots that assist with some aspect of mobility and gait in elderly people.
A great number of sensor and robotic technologies exist and can be used for gait and mobility evaluation of an elder person at home in an automated way without the need of the physical presence of any medical personnel.
Eventually, the potential for these technologies to support dementia care at home can reduce healthcare expenditure secondary to formal care needs and premature institutional care. 74
Comprehensive mobility assessments should include capacity measures as well as measures of real-life out-of-home mobility.
However, exploiting the potential for technology to meet care for elderly patients' needs depends on a number of factors, including raising awareness of available technologies and their utility, promoting accessibility and affordability, and overcoming challenges to acceptance and use.
Future research, rigorous clinical trials, and continuous sensor and robotic developments are required to improve the use of advanced technologies to be integrated with current care of aging.
Footnotes
Acknowledgment
The research leading to these results has received funding from the European Union Horizons 2020—the Framework Programme for Research and Innovation (2014–2020) under grant agreement 643808 Project MARIO “Managing active and healthy aging with use of caring service robots.”
Author Disclosure Statement
No competing financial interests exist.