
Abstract
Mathematical modeling of soft robots is complicated by the description of the continuously deformable three-dimensional shape that they assume when subjected to external loads. In this article we present the deformation space formulation for soft robots dynamics, developed using a finite element approach. Starting from the Cosserat rod theory formulated on a Lie group, we derive a discrete model using a helicoidal shape function for the spatial discretization and a geometric scheme for the time integration of the robot shape configuration. The main motivation behind this work is the derivation of accurate and computational efficient models for soft robots. The model takes into account bending, torsion, shear, and axial deformations due to general external loading conditions. It is validated through analytic and experimental benchmark. The results demonstrate that the model matches experimental positions with errors <1% of the robot length. The computer implementation of the model results in SimSOFT, a dynamic simulation environment for design, analysis, and control of soft robots.
Introduction
Soft robots are autonomous systems with a continuously deformable mechanical structure, which provide them novel capabilities relative to traditional rigid robots. The configuration space of soft robots is (theoretically) infinite, meaning that, the robot tip can reach every point in its three-dimensional workspace with a (theoretically) infinite number of shape configurations. 1 Exploiting finite strain deformations, soft robots can adapt their shape to nonlinear paths, access difficult-to-reach remote environments, and squeeze through openings smaller than their nominal dimensions. 2 These features enable soft robots to perform delicate tasks in cluttered and/or unstructured environments, as well as to investigate novel grasping and manipulation possibilities. Furthermore, the compliance of their underlying material makes them ideal for applications that require a safer physical human–robot interaction.
As a matter of fact, soft continuum robots have proven their capabilities in several robotic fields, such as minimally invasive robotic surgery, 3 robotic rehabilitation,4,5 autonomous remote maintenance and inspection in industrial6,7 and space 8 environments, and physical human–robot interaction. 9
Besides the interesting applications, fundamental topics in robotics need to be revised and expanded with novel principle and methods to provide a solid theoretical foundation on soft mechanisms. In this respect, over the past few years, significant advancements have been done in design and fabrication,10–12 planning and control,13–19 grasping and manipulation,20–22 and robotic locomotion.23–25 This article focuses on modeling aspects. The considered problem statement and related work are introduced next, leading to the overall contributions made.
Problem statement
Real-time model-based analysis, simulation, planning, and control of soft robotic manipulators are complicated by the lack of dynamic models that are at the same time accurate and computationally efficient. Therefore, our overall goal is to derive a soft robots dynamic formulation able to handle geometric nonlinearities, which is:
accurate, using a geometrically exact approach for large deformations; computationally efficient, using a finite element spatial integration and a geometric time integration.
Review of relevant literature
Currently, the most adopted practice in the soft robotics community is to approximate the robot's shape as a series of mutually tangent circular arcs, which are described by only three parameters, namely the radius of curvature, angle of the arc, and bending plane. This is known as the constant curvature kinematic assumption. 26 This approximation has been verified experimentally in many continuum robots.27–29 However, when extreme loading conditions lead to complicated robot's shape, variable curvature kinematic frameworks combined with elasticity theories for slender objects are preferable. 30
The widely used approach in the past years was the classical Bernoulli–Euler beam theory, which makes the assumption of small deflections. The planar large-deflection Bernoulli–Euler elastica theory and its analytical solution in terms of elliptic functions were used to describe the exact mechanics of planar robotic arms. 31 Timoshenko beam models have also been investigated to include shear effects. 32
A promising approach for modeling soft continuum robots comes from the Cosserat rod theory and its particular case Kirchoff rod theory, which neglects shear and axial strains. This theory can be conveniently used to obtain general models of continuum robots.
Since the pioneering works of Simo and Vu–Quoc33,34 on geometrically exact beam theory in finite strains, several nonlinear models have been derived in continuum mechanics.35–39
Continuum models have been used for the first time in robotics by Chirikjian, 40 to approximate the shape of hyper-redundant or snake-like manipulators. Then, geometrically exact models based on Cosserat rod theory have been used for continuum manipulators. Boyer et al. 41 introduced for the first time the idea of using the internal strains to compute the three–dimensional movements of a swimming eel–like robot.
Trivedi et al. 42 developed a static model of the OctArm manipulator using Cosserat rod theory and a fiber-reinforced model of the air muscle actuators. Rucker et al. 43 for the first time modeled the static shape of an active cannula (a concentric tube robot) as a Cosserat rod under external loading. Afterward, they extended the theory to dynamic modeling of tendon-driven manipulator. 44 To numerically solve the dynamic equations, they used the Richtmyer's two-step variant of the Lax–Wendroff finite difference scheme implemented in a suite of MATLAB software written by Shampine. 45
The large-scale integrating European Project OCTOPUS has led to the manufacturing of a prototype arm inspired by the octopus vulgaris. 46 To model this robot, Renda et al. considered external dynamic loads in the Cosserat rod equations, derived using geometric notations. To numerically solve this model, they first involved an upwind finite difference method for hyperbolic equations, based on explicit time integration and a decentralized space differentiation. 47 More recently, they have proposed a dis-crete Cosserat approach involving piece–wise constant strains.47–49 They have extended to the robotics community the approach of using piece–wise helical arcs for discretization of Cosserat rod models, until now used (beyond computational mechanics) only for computer graphics applications.50,51 Despite their proven accuracy, these models are still computationally inefficient and, thus, difficult to use for real-time applications, when dynamics comes into play. 47 Furthermore, some of them are specifically derived for custom manipulators. In this paper we start from the idea of using deformations as degree–of–freedom for modeling chains of soft bodies.40,47,51 Our purpose is to extend the recent advancements in Cosserat rod modeling of soft robots to a general full geometric framework, involving both geometric spatial and geometric temporal integration techniques, in a finite element fashion. This framework outperforms previous studies by reaching a compromise between accuracy and computational efficiency which is promising towards the development of model–based, real–time applications of soft robots.
Contributions
We model a soft robotic arm as the continuous assembly of cross sections moving upon a three-dimensional curve according to infinite rigid body transformations that are defined by distributed laws of internal deformations. This means that we do not consider warping effects and area change of the cross sections. The kinematic assumption of considering rigid cross sections allows to describe mathematically the soft arm in terms of the Lie group structure of rigid body motions, and to use the powerful techniques of modern differential geometry. Our model is geometrically exact since it makes no approximation on kinematic variables, thus it can reproduce the exact nonlinearity in the deformations due to bending, torsion, shear, and extension.
To the best of authors' knowledge, the use of a formalism combining screw theory, Lie groups and Lie algebras, Cosserat rod models, and the finite element method, for modeling geometrically nonlinear arms, is considered here for the first time in the soft robotics community.
The contributions of this work are as follows.
Lie group formulation suitable for soft robots dynamics using the Hamilton's variational principle of mechanics.
Spatial integration using helical shape functions for the finite element. This leads to a simple description of the forward and inverse kinematics of the soft arm, using the exponential and logarithmic mappings. The model is valid for straight and curved initial configuration of the arm. Furthermore, a geometrical interpretation of the reference curve that interpolates the soft arm is provided.
Derivation of a finite element soft geometric Jacobian, which relates the velocity of the arm with the time derivative of the deformations. The soft geometric Jacobian constitutes an essential tool to describe the statics, using the principle of virtual work, and the dynamics, derived from the weak form of the dynamic equilibrium equations of the continuum formulation. The proof of the kinetostatic duality and the derivation of a dynamic model with the same structure of the serial rigid manipulators are observed.
Geometric time integration using the implicit generalized α Lie group scheme, and the computer implementation that results in SimSOFT, a physics engine for soft robots.
Analytically integrable models for soft robots, including one cantilever soft arm in pure bending and one soft arm in planar rotation. Even if simple, analytic models are useful to guide the intuition for developing manageable mathematical models for more complex situations.
Experimental validation of the discrete model with the Princeton benchmark, which involves in-plane and out-of-plane motions where bending, torsion, and shear are coupled.
Examples of dynamic simulations of soft robots with different settings and in different scenarios.
Outline
The remainder of the article is organized as follows. Continuum Formulation section formulates the continuum model of Cosserat rods on a Lie group. The derivation of the finite element-based deformation space formulation is presented in The Deformation Space Formulation section, whereas the geometrical interpretation of the interpolated reference curve together with a dynamic example is presented in Geometrical Interpretation section. Special Cases section reports special examples that are analytically integrable. The experimental validation of the model is presented in Experimental Validation section. Some application scenarios are discussed in Application Scenarios section, with conclusions given in Conclusion section. Finally, in Appendices A1 and A2, the basic concepts and notations for Lie groups are reported.
Continuum Formulation
Position field
The three-dimensional reference curve is parameterized by the material abscissa
Geometric description of the reference curve for the continuum arm.
Hence, the position field, which describes the configuration of the continuum arm, is represented by the mapping
Deformation field
The deformation field is obtained by taking the space derivatives of the position field. We introduce an element
where
where
Velocity field
The velocity field is obtained by taking the time derivatives of the position field. We can introduce the velocity variables as an element
which constitutes the velocity field along the continuum arm.
Compatibility equations
Compatibility conditions for finite strains in continuum mechanics are formulated such that the body is left without unphysical gaps or overlaps after a deformation. This translates into formulating compatibility conditions between the strain and the velocity of a continuum body. Since two different derivatives are involved to define the strain and the velocity, respectively, the space and time derivatives, the commutativity of the cross derivatives must hold from Eq. (120). Hence, this condition is used to formulate the compatibility equations as
Notice that similar compatibility equations, according to Eq. (119), can be formulated as
Strain energy
The internal strain energy of the continuum arm is defined as
where
The internal force
where
In general, these matrices are not diagonal. But, in the case of an initially straight configuration of the soft arm, they become diagonal when the reference curve is chosen to be the neutral axis of the arm, and
Using Eq. (8), Eq. (7) becomes
where the first term on the right-hand side recalls the well-known structure of the internal energy for a linear elastic material expressed as a quadratic form in
Static equilibrium equations
According to the principle of virtual work, the manipulator is in static equilibrium if and only if
where
where, recalling the commutativity of the Lie derivatives in Eq. (120), the variation of the strains is expressed as
in which we used
where the first term on the right-hand side is interpreted as a boundary condition.
In general, the virtual work done by the external forces can be expressed as
where
Finally, the weak form of the static equilibrium equations is obtained by inserting Eqs. (15) and (14) into Eq. (11), which yields
Indeed, the strong form reads
Kinetic energy
The kinetic energy of the continuum arm is defined by
where
in which
Dynamic equilibrium equations
The dynamic equilibrium equations of the continuum arm can be obtained from Hamilton's principle, which states that the action integral over the time interval
where the variations are fixed at t0 and t1. In Eq. (20),
By recalling the commutativity of the Lie derivatives in Eq. (120), the variation of the velocity in terms of the variation of the configuration variables is expressed as
Inserting Eq. (22) into Eq. (21) and integrating by parts yield
Since the variations are fixed, the first term on the right hand side vanishes. Finally, by combining Eq. (23) and Eq. (16), Hamilton's principle in Eq. (20) yields the following weak form of the dynamic equilibrium equations
Indeed, the strong form of the dynamic equations of the continuum arm reads
The Finite Element Deformation Space Formulation
In this section, we derive the deformation space formulation for kinematics, statics, and dynamics of soft robots using a finite element approach.
The finite element approach
The finite element method is a spatial discretization technique for solving partial differential equations [as Eq. (25)]. This method schematically models a generic mechanical system with a finite set of nodes which are interpolated by proper shape functions. Therefore, the same approach can be used to simulate both serial and/or parallel chains of soft bodies. This could be of great advantage for the soft robotics community, due to the recent growing interests also in parallel continuum robots. Indeed, these systems might improve robot–assisted surgery by providing instruments easy to miniaturize, and which can achieve multi degrees–of–freedom motion in confined spaces.52,53 In the following we describe the dynamics of a single finite element which is used to simulate the behavior of a single–segment soft manipulator. This finite element is composed by two nodes which are interpolated by a helical shape function, and its behavior is described by the internal deformations. Multi–segments (even branched) soft manipulators, are simulated by considering a mesh composed by n finite elements, being n the number of segments of the soft arm.
Forward kinematics
The forward kinematics gives the mapping from the deformation field to the
where
The forward kinematics mapping in Eq. (26) has an analytic interpretation. As a matter of fact, Eq. (26) is the closed-form solution of Eq. (3), when
Let us introduce the relative configuration vector
Eq. (27) represents a formula for the interpolation of frames, which are elements belonging to SE(3), that is, a noncommutative and nonlinear space. In geometric terms, this equation can be interpreted as, starting from the nodal frame,

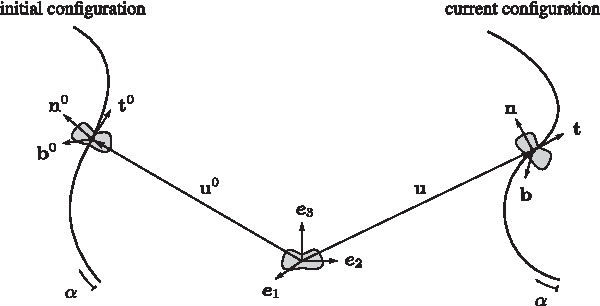
Soft arm in its initial and current configuration.
Eq. (27) represents the forward kinematics for soft robots using the exponential mapping.
Inverse kinematics
The inverse kinematics gives the mapping from the position and orientation fields to the deformation field of the soft arm. By considering the inversion of the exponential function in Eq. (27), we have
where
where
where
Differential kinematics
The differential kinematics aims at finding a mapping between the velocity vector along the arm and the time derivatives of the state of the soft manipulator, namely the internal deformation vector.
We start from computing the time derivative of Eq. (27), which can be conveniently achieved using the following two expressions:
In particular, Eq. (31) has been obtained according to the definition of the left invariant vector field for Lie derivatives in Eq. (113), whereas Eq. (32) has been obtained according to the definition of derivatives in general,
Premultiplication of Eq. (33) with the quantity
By considering the adjoint representation of a Lie algebra element in Eq. (117), we obtain
Eq. (35) can be written in terms of the axial vectors by using the tangent operator in Eq. (129) as
Eq. (36) relates the velocity along the arm with the initial velocity and the time derivative of the deformations, since it holds
and
Since
where
being
From Eq. (41), we have
where
Finally, by inserting Eq. (45) into Eq. (36), we obtain
where
is the
Statics
The static equilibrium equations are obtained by recalling the principle of virtual work in Eq. (11). To apply that principle, we need to compute the discretized variation of the expression of the internal energy in Eq. (12) and the discretized variation of the expression of the external energy in Eq. (15).
Considering a linear elastic material, Eq. (12) reads
where
For the discretized variation of the external energy, we need to compute the discretized variation of
Introducing Eq. (50) into Eq. (15), we obtain
where
According to the principle of virtual work, the manipulator is in static equilibrium if and only if
Hence, substituting Eq. (48) and Eq. (51) into Eq. (53) leads to the notable result
stating that the relationship between the external forces
Dynamics
From Eq. (46) we can compute the discrete model of acceleration as
Hence, using Eqs. (46), (55), and (50), the weak form of the discretized dynamic equilibrium equation in Eq. (24) for a constant deformation finite element becomes
Since Eq. (56) holds
Let us introduce the following matrices from Eq. (57):
Therefore, the dynamic model of the finite element for soft arm discretization becomes
and it has a similar shape to the piece–wise constant strain model. 47 The model recalls the dynamic model of a rigid arm, where the state of the manipulator is represented by the position and velocity of joints.
Time integration
When the dynamics of a mechanical system is formulated on a Lie group, geometric methods can be conveniently used to numerically solve the equations of motion. Geometric time integrators have the main advantage of not requiring a global parameterization of motion, in particular of rotation variables, meaning the motion variables are expressed in terms of specific coordinates with respect to the reference frame.
51
Thus, the original equations of motion do not suffer from any of the drawbacks inherent to the global parameterization process, that is, singularity, high nonlinearities, and dependency on the orientation of the body.
54
Among the geometric time integrators, we use the Lie group version of the generalized
SimSOFT
SimSOFT is our novel C++ physics engine for soft robots. It implements the geometrically exact finite element formulation discussed in this article. It allows modeling of soft robots that are made of continuously deformable bodies, but it also implements rigid bodies. The robots might be actuated by imposing predefined forces and torques laws, or by input of forces and torques from external .txt files. The automatic computation of sectional properties for common cross sections is available. A small library of material properties is included as well. The engine foresees some functions to display the manipulators during the simulation, and to plot meaningful data, as displacements and velocities of the body as well as forces and torques at boundaries. SimSOFT has been implemented on a Intel® Core™ i7-4910MQ CPU (quad-core 2.50 GHz, Turbo 3.50 GHz), 32 Gb RAM 1600 MHz DDR3L, NVIDIA Quadro K2100M w/2GB GDDR5 VGA machine, running Ubuntu 14 64 bits. It took an average computational time of 2 s for 1 s of dynamic simulation, with time step size of 0.01 s, which is far better than existing implementations, 47 which require minutes of computer calculation to compute 1 s of simulation.
Geometrical Interpretation
In this section, we provide an elegant geometric interpretation of the reference curve that interpolates the soft arm.
Recalling Figure 1, the elements of the local Frenet triad along the reference curve are given by the following expressions:
where
From the space derivative of Eq. (27), we obtain
such that, by using Eq. (59), the unit tangent to the reference curve is given by
where we used
so that, using Eq. (60), the unit normal vector is given by
where the curvature is computed according to Eq. (62) as
Since
The space derivative of Eq. (69) is given by
Therefore, using Eq. (63), the torsion is given by
Thus, the interpolated reference curve also presents a constant torsion along its axis. Developing Eqs. (68) and (71), we obtain
and the Gaussian curvature
is also constant along the constant deformation soft arm. Thus, the interpolated reference curve, from a geometric point of view, is represented by a helix, that is, a spatial curve with constant curvature and torsion. Its geometric interpretation is shown in Figure 3. As matter of fact, the abstract mathematical concept of exponential map on

Geometry of the interpolated reference curve.
Helical motion
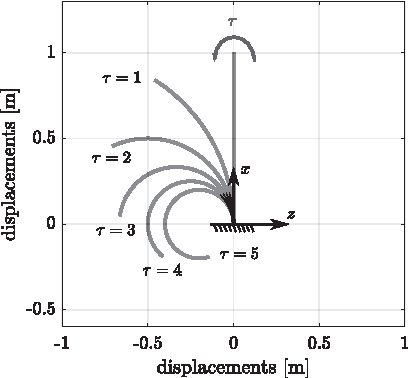
Here, as an illustrative example, we perform the dynamic simulation of a cantilever soft arm during a helical motion. This is possible by actuating the arm with a variable torque and a force as illustrated in Figure 4. The load conditions produce bending and torsion solicitations. The torque and force follow an

Cantilever soft arm subjected to variable end loads.

Snapshot of the soft arm in helical motion, at t = 3 s.

Displacements of free end of the soft arm in helical motion.
In the following we present two different examples of arms in helical motion, an elastic rod made of spring steel and a hyperelastic body made of silicone. The main objective of these examples is to demonstrate the capability of the model to handle geometric nonlinearities with different settings of materials and cross sections of the arms. The first example simulates the behavior of a microscale and highly flexible system that can be used for minimally invasive robotic surgery applications. Indeed, the second example simulates the behavior of hyperelastic soft materials usually used in soft robotics applications as in robotic rehabilitation.
Elastic steel rod
The helical motion simulation is replicated here for an elastic rod made of spring steel. The torque and force follow a linear profile with

Displacements of free end of the elastic steel rod in helical motion.
Elastic silicone body
The helical motion simulation is replicated here for a silicone body. The force and torque follow a linear profile with
Displacements of free end of the hyperelastic silicone body in helical motion.
Special Cases
In this section, starting from the geometrically exact model, we present two special cases, namely the planar bending of a soft arm in static conditions and the planar rotation of a soft arm in dynamic conditions. For these special cases, analytical solutions exist (the static solutions can be found in Ref. 56 ); here, we show how the deformation space model fits to these solutions.
Planar bending
Let us consider a cantilever soft arm actuated by a constant end torque
where we consider the arm made of linear elastic material. We assume constant mass and stiffness cross section properties as well as constant initial curvature and torsion of the reference curve. Under these hypotheses,
Deformation field
The equilibrium equations in the static configuration expressed by Eq. (17) become
where we used the fact that the stiffness matrix is constant over the arm. In this case, the solution for the deformation field can be expressed in closed form and it is given by
where
with
therefore, the constant of integration
by introducing Eq. (79) in Eq. (76), the solution for the deformation field reads
In the special cases of pure bending/torsion solicitations, the external forces are given by
where
Thus, it results that
field
The position and orientation fields are obtained by solving the kinematic equations in Eq. (3). Since the deformation field obtained in Eq. (83) involves constant strains, Eq. (3) can be integrated analytically and the solution for the
which is equivalent to the forward kinematics mapping obtained in (26). Explicitly, Eq. (85) means
Since we are considering initially a straight arm, we have that
Let us consider a pure bending tip load as
where
which is the exact solution expected from the special Cosserat rod theory.
57
A similar solution has been derived in the constant curvature framework for continuum robots.
26
Notice that in this example, the constant strains are not an assumption, but it comes out from the external load and boundary conditions. Since the exact analytical solution for the position and orientation field of the arm in a pure bending configuration is a curve of constant curvature, and since the kinematics in Eq. (27) contains this exact solution, the deformation space model is exact in pure bending configurations. The same happens in pure torsion configurations, where the exact solution for the
Static configuration of a cantilever soft arm in pure bending.
Planar rotation
Let us consider the soft arm shown in Figure 10 that is free to rotate at a constant velocity

Schematic model of a free rotating soft arm.
Due to the centrifugal forces, it is expected that the arm is stretched. Accordingly, we have
Deformation and velocity fields
The deformation and velocity fields are obtained by solving the dynamics and compatibility equations. The dynamic equations in Eq. (25) become
while the compatibility equations in Eq. (6) become
Eq. (95) and Eq. (98) lead to
Deriving Eq. (93) with respect to α and replacing the expression of
The solution of Eq. (100), setting
where a and b are two constants of integration. By using the boundary conditions
Inserting the resulting expression of
Finally, the expressions for v3 and
Notice that
SE(3) field
Integration of Eq. (5) leads to
for the orientation part and
for the position part. Again, the integration of the kinematic equations is possible using the exponential operator.
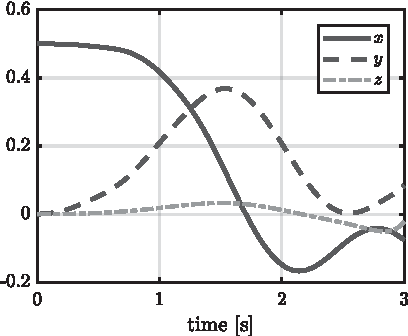
Let us consider the model in Figure 10 with

Displacements of node B of the free rotating soft arm. Color images are available online.
where
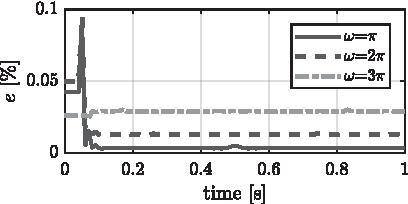
Errors of the free rotating soft arm.
Experimental Validation
Experimental setup
We replicate in simulation the Princeton experiment given in Ref.
58
The schematic model of the setup is shown in Figure 13. It comprises a cantilever arm subject to a tip load f, with variable lines of action according to the different values of the loading angle θ. Variation of the loading angle from 0 to 90 degrees yields out-of-plane motions with high nonlinear problems due to the fact that bending, torsion, and shear in two directions are coupled. The system is subject to gravity downward the z direction. The length of the arm is
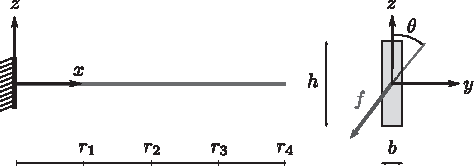
Schematic model of the Princeton experiment.
where
where
Experimental results consist of measurements of the two deflections of the cross section's dimensions of the arm (along y and z axes) at four radial stations
To achieve a synthetic index on the variations of the experimental measures, we calculate Eq. (111) for each radial station and loading condition, with fixed loading angle. Then, we compute their standard deviations: the result is the index
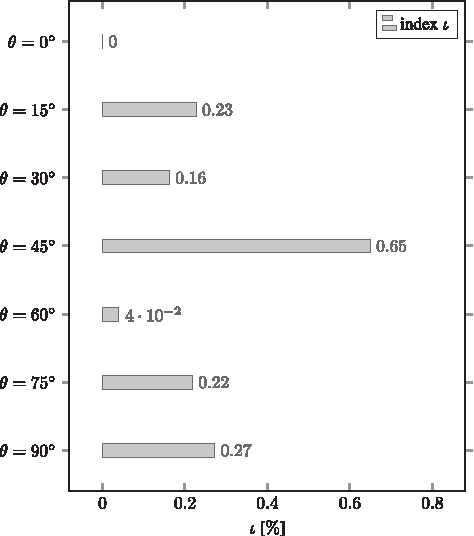
Variations of the experimental measurements.
Definition of the errors
The same external loading conditions of the experiments, including the applied forces and the gravity effects, were replicated in simulation. Then, the deflections of the cross section axes (along y and z) at
We define a percentage error
where
Results
A total of 25 simulations were conducted and the 100 comparisons with the experimental data give satisfactory results.
degree
In-plane motion in the plane xz (Fig. 15a). The errors defined in Eq. (112) are shown in Figure 16a.
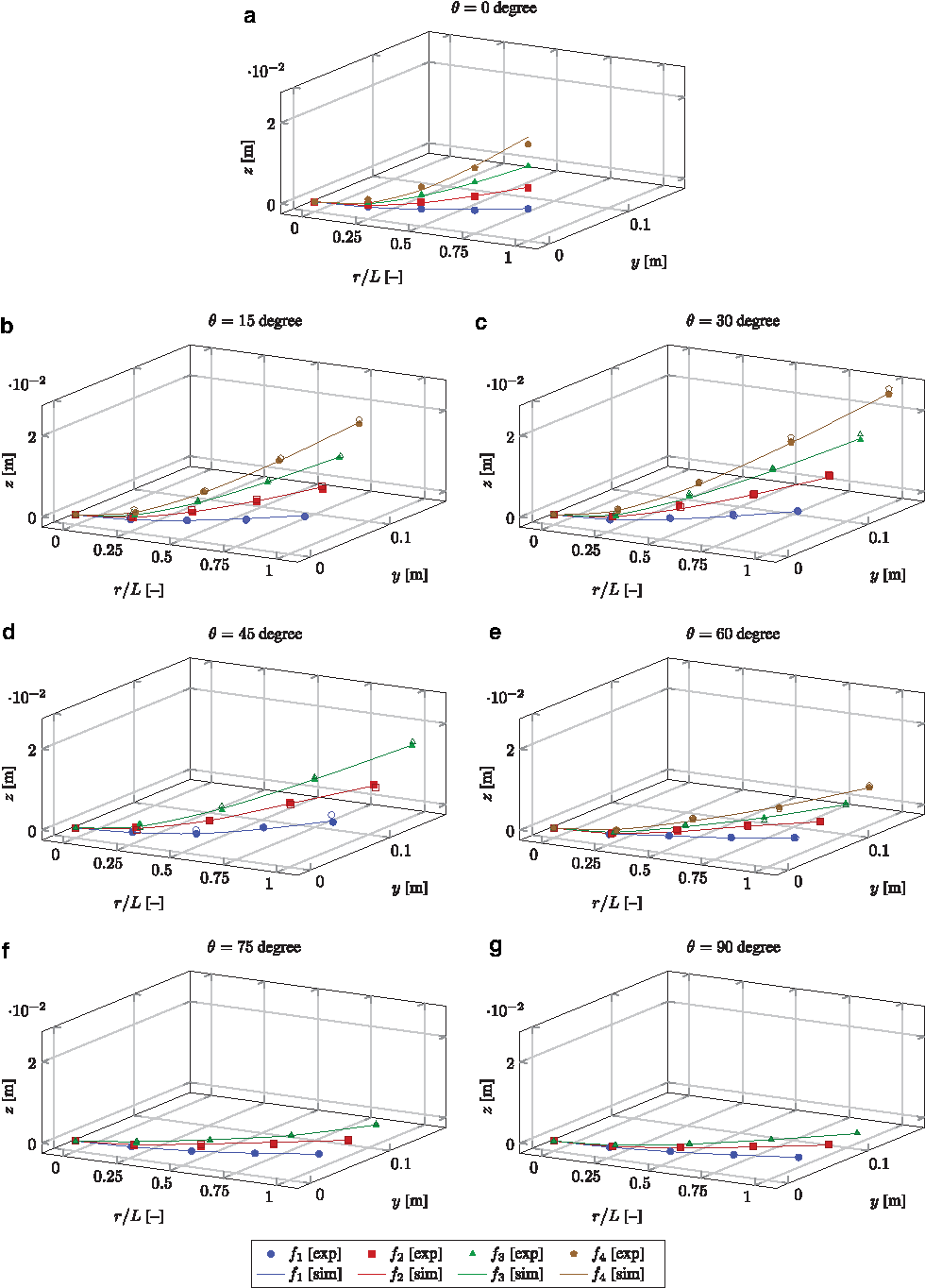
Deflections of the cross section dimensions for the Princeton experiment. Solid lines, simulated data; scattered lines, experimental data (filled, +θ; nonfilled, −θ). Color images are available online.

Normalized Euclidean errors between the averaged experimental data and simulated data for the different load conditions. Color images are available online.
degree
Out-of-plane three-dimensional motion (Fig. 15b). The errors defined in Eq. (112) are shown in Figure 16b.
degree
Out-of-plane three-dimensional motion (Fig. 15c). The errors defined in Eq. (112) are shown in Figure 16c.
degree
Out-of-plane three-dimensional motion (Fig. 15d). Notice that the experiment with
degree
Out-of-plane three-dimensional motion (Fig. 15e). Notice that the four loading conditions are with half of the intensity with this loading angle, according to Experimental Setup section, in order to avoid physical damages on the experimental apparatus. The errors defined in Eq. (112) are shown in Figure 16e.
degree
Out-of-plane three-dimensional motion (Fig. 15f). In this study, the experiment with
degree
In-plane motion in the plane xy (Fig. 15g). In this study, again the experiment with
Discussion
Figure 15 shows the shapes of the arm under the applied loads, for all loading angles. The solid lines indicate the simulated responses, whereas the scattered lines indicate the experimental responses, for loading angles
As we can expect, for each loading angle, the general trend is a slight increase of the errors when the intensity of the load increases.
However, if we compare the two extreme cases, that is,
From the available measurements, we can observe higher errors when the load increases, and when the loading conditions produce the majority of motion in the more compliant directions. But, since in the latter cases the experiments were performed with forces of lower intensity so as to not compromise the experimental apparatus, all the errors in this set of experiments span in the small range 0–0.6%.
It is interesting to notice than the tip errors (corresponding to
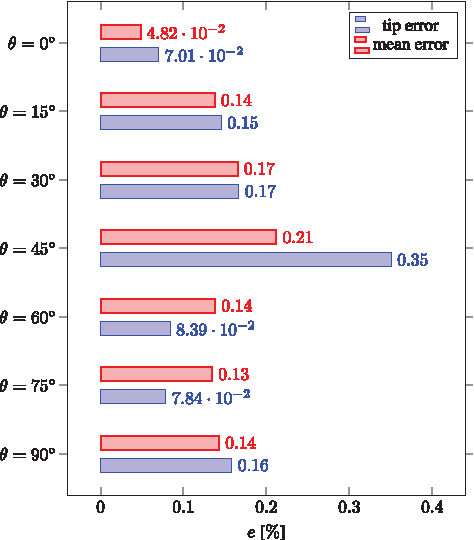
Experimental validation results (errors). Color images are available online.

Experimental validation results (standard deviations of the errors). Color images are available online.
Notice that the standard deviations of these errors (reported with respect to the averaged experimental deflections) are the same order of magnitude of the
The tip errors were calculated to provide a more common accuracy index for the robotic community, even if in the case of soft robots we are interested in all the points along the configuration of the manipulator.
Application Scenarios
The main advantages that historically have motivated the development of soft and continuum robots are their ability to 61 :
access remotely in complex environments: this ability is appealing in maintenance, inspection, and repair operations, and in minimally invasive surgery;
adapt their shape to perform whole-limb manipulation: soft robots might help in applications that require a safe physical human–robot interaction, as in industry or in rehabilitation.
Therefore, we select two scenarios in which the use of such robotic systems is of current interest: surgical and rehabilitation. For these applications, we just set up the model and perform simulations that reflect typical motions of these systems.
Surgical
The Magellan™ Robotic Catheter 10Fr has been selected for this analysis (www.hansenmedical.com). This is a robotic catheter used for intravascular shaping operations, and it is composed of a guide and a robotically steerable inner leader. Both the guide and the leader have the possibility to bend. In the case of minimal extension of the leader, the catheter is composed of two consecutive elements (1–2, the guide and 2–3, the leader) as we can see from the schematic representation of Figure 19. The guide and the leader are made of spring steel, with density
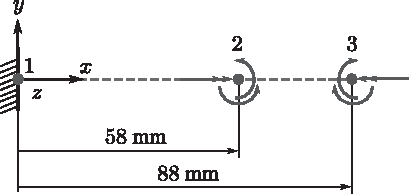
Magellan Robotic Catheter 10Fr in the configuration of minimum extension of the leader (only flexible parts shown). Schematic model.
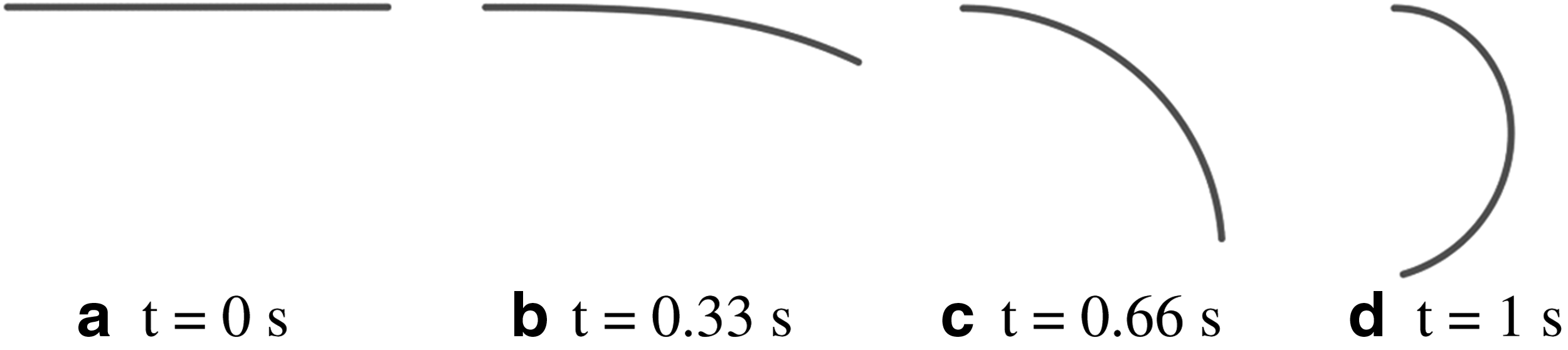
The actuation load induces an out-of-plane motion of the robotic catheter, which is typical in robotic steerable shaping operations, resulting in both bending and torsion. Some snapshots of the model in SimSOFT during the simulation are shown in Figure 20a–d.

Magellan Robotic Catheter 10Fr in the configuration of minimum extension of the leader (only flexible parts shown). Snapshots of the simulation in SimSOFT.
Rehabilitation
A soft body subjected to bending and made of elastomeric material has been selected for this analysis. This can approximate the soft bending actuators that are used in the development of soft orthotics and/or prosthetics for rehabilitation purposes. The schematic representation of the system is shown in Figure 21. The length of the body is

Schematic model of the soft silicone body with applied torque.
Snapshots of the soft silicone body with applied torque in SimSOFT.
Conclusion
In this article, geometrically exact models for the kinematics, statics, and dynamics of soft robots have been derived. They account for the large deformations due to bending, torsion, shear, and extension. The models build on top of the theory of continuum Cosserat rods, whose partial differential dynamic equations are formulated on a Lie group. The spatial discretization was achieved, in a finite element manner, using helical shape functions that mathematically are represented by the exponential mapping. From this, the forward and inverse kinematics of the arm were derived, accounting for robot with straight or curve initial configuration. The subsequent derivation of the soft geometric Jacobian allowed the description of the differential kinematics of the robot. Then, the statics was derived using the principle of virtual work, whereas the dynamics was derived from the Hamilton's principle. Finally, the equations of motion were numerically solved using a geometric time integration scheme, the Lie group version of the generalized
We validated the discrete model with two analytic examples, namely the pure bending of a cantilever soft arm and the pure rotation of a soft arm in the plane, with varying external conditions. We performed an experimental validation with respect to the Princeton arm, which represents an excellent benchmark for testing models where bending, torsion, and shear are coupled. A total of 25 simulations corresponding to 100 averaged experimental positions were replicated. The results show an average tip distance between the real and simulated robot of 1.32 mm, whereas the errors in all the performed simulations are far <
The models derived in this article, for the first time in the soft robotics community, combine a geometric spatial integration with a geometric time integration. Thus, they can effectively be considered full geometric models. Furthermore, the finite element method allows a straightforward implementation of concatenated elements.
The average computational time required for solving 1 s of simulation, with time step size of 0.01 s, is 2 s. This significantly improves previous results in the field, and it is promising toward a real-time model-based reconstruction of the robot shape in dynamic conditions. Furthermore, the full geometric models discussed in this article might pave the way for model-based controllers, enabling the shape control of this class of robotic manipulators.
Finally, the computer implementation of the models described in this work has led to SimSOFT, a software library for soft robot modeling, which is in continuous development by the authors.
Footnotes
Acknowledgments
This work was partially supported by the FlexARM project, which has received funding from the European Commission's Euratom Research and Training Programme 2014–2018 under the EUROfusion Engineering Grant EEG-2015/21 and partially by the RoDyMan project, which has received funding from the European Research Council under Advanced Grant 320992.
Author Disclosure Statement
No competing financial interests exist.
Appendix A1: Nomenclature
(
(.)′ derivative with respect to space
(., .)
t
α
Appendix A2: Lie Group Framework
This Appendix reports some basic operations on a Lie group.