
Abstract
Pathological tremor is a kind of movement disorder that affects a wide range of patients with Parkinson's disease and essential tremor. Different from available clinical treatments for tremor, including drug and surgery therapy, a novel soft exoskeleton for tremor suppression (SETS) based on assistive technologies is proposed in this study. The SETS system is equipped with a controllable flexible semiactive actuator based on magnetorheological fluid. To overcome the drawbacks of traditional fluidic semiactive actuators, we devise a soft semiactive actuator that is a combination of cylinder-piston damper and elastic fluidic damper. The overall system is characterized with low mass, compact structure, comfortable wearability as well as real-time adjustability for tremor attenuation with varying intensity. The SETS can assist in suppressing tremor of wrist joint in three degrees of freedom. The prototype weighs about 255 g and can yield a maximum damping force of about 11 N. Simulation studies and experimental tests were carried out to evaluate the performance of the system. The results show that the SETS could reduce wrist tremor regarding magnitude of acceleration and angular velocity by 61.39% and 56.22%, respectively, which validate the manifest mechanical efficiency of this functional system.
Introduction
Pathological tremors are abnormal, involuntary, rhythmical, and oscillatory movements in human body, which are symptomatic of some complex neurodegenerative disorders, including essential tremor (ET) and Parkinson's disease (PD).1,2 Tremors can completely or partly impair the performance of natural motor tasks of the patients.3,4 Tremulous limb movement often led to serious disorder of activities of daily living (ADLs) that can contribute to depression and social isolation of patients. Of population more than the age of 65 years, tremors affect 5.6% with PD or ET.5–7 A longitudinal research shows 63.4% of ET patients reported worsening at their follow-up evaluations. 8
The treatments for PD or ET include medication, 9 traditional Chinese treatments, 10 neurosurgery, 11 and deep brain stimulation. 12 Although their effectiveness has been demonstrated, there are some limitations such as side effects and treatment costs. In addition, some invasive treatments can be accompanied by possible risks of paresthesia, permanent complication, dysarthria, speech impediments, as well as hemiparesis and stroke.5,13,14 As a feasible alternative, some assistive systems were developed using mechanical exoskeletons15–17 or functional electrical stimulation (FES).18–20
Previous studies have shown that FES can successfully attenuate tremors18,21; however, some shortcomings still exist and prevent the methodology from being applied in ADLs applications.20,22 The main drawbacks that affect patients' acceptance include the interference with patients' voluntary movements, the quick muscle fatigue during FES, and the inconvenience in wearing the device.5,19,23 In addition, it is a big problem for closed-loop control of FES in suppressing tremor in real time. 22 Mechanical exoskeletons are another option, and there are three categories: active methods using active actuators, passive methods using shock absorbers, and semiactive methods using magnetorheological (MR) fluid dampers. 5
Active methods for tremor attenuation require an exterior power supply to provide a resistance force against hand tremor movement. Therefore, active devices should be designed based on a good model of the human hand as well as enough knowledge of tremor amplitude and frequency.5,17 In addition, hand impedance and tremor frequency are different between individuals. These items significantly affect the efficiency of this strategy. The performance of active devices depends on sensors, human factors, and control strategies (active disturbance rejection control and impedance-admittance control).5,24 Control strategies must be able to recognize and attenuate hand tremors in real time with a minimum restriction on the voluntary motion.
The well-known representative of active devices is WOTAS. 17 It was developed under the framework of the DRIFTS project. 25 WOTAS was equipped with kinematic and kinetic sensors. A filtering algorithm (the weighted fourier linear combiner [WFLC] algorithm) was used to estimate the tremor amplitude, frequency, and phase. The result of this study showed a high performance (up to 90% of the tremor was suppressed). However, the WOTAS is actually a kind of rigid-body exoskeleton so it is bulky and heavy. It also restricted voluntary wrist movement during adduction/abduction. These drawbacks caused the exoskeleton impossible for long-term use. In another study, an active pneumatic actuator was proposed for tremor suppression. 16 The efficiency force was reported about 96.8–98.8%. However, the pneumatic system would make loud noises and the air compressor system might be too heavy to carry, both of which made the device difficult for practical application.
Passive methods for tremor suppression adopt shock absorbers that were attached to the tremulous limbs. Several studies have demonstrated the effectiveness of the passive devices.5,26,27 For instance, controlled energy dissipation orthosis was presented to be mounted on a wheelchair frame or a table. It could assist patients in daily activities such as eating and writing. 28 Tuned vibration absorber was proposed based on an empirical model of the human arm. 29 Viscous beam equipped with a low pass filter was used for suppressing tremor of the hand during flexion/extension. 26 Series elastic viscous damper was presented to suppress tremor in high-frequency level. 27 Nevertheless, an obvious shortcoming of this method is its inability to exert active force over the limbs. In addition, passive devices apply some resistances and limitations against the voluntary movement.
Semiactive methods were based on MR fluid. Good efficiency of suppressing tremor can be achieved within a limited scale. Besides, the damping force is real-time controllable.15,16,30 The main disadvantage of the method is that it also limits voluntary movements while suppressing tremor. In general, fluid semiactive actuators can be divided into two main classes: cylinder-piston damper 1 and elastic fluidic damper. 31 Cylinder-piston damper requires a relatively higher maintenance cost and needs seals for a good damping force and stroke length. Elastic fluidic damper generates lower damping force with a smaller displacement and a high back drivability. Inspired by previous research, we propose a new soft semiactive actuator that can overcome the limitations of the two common types of fluid semiactive actuators while preserving the major advantages of them.
It is known that soft robotic exoskeletons are becoming growingly popular in rehabilitation and medical applications. In many of these applications, soft wearable robotic systems assist in human rehabilitation and ensure safety and productivity.32,33 The development of soft actuators and soft semiactive actuators is one of the most challenges in technological barriers in robotics. 34 The difference between soft actuator and semiactive actuator depends basically on the kind of actuator in use. 35 The soft actuators are commonly used to generate force for providing movement and the semiactive actuators are usually performed to suppress external force.
In general, the soft wearable actuation systems include hydraulic soft actuator, 36 pneumatic soft actuator, 37 polymer soft wearable for tendon-driven actuation, 38 dielectric elastomer (DE) actuator, 39 soft fluidic elastomer actuator, 40 and fabric actuators. 41 Some pilot studies have proposed the idea to use DEs as soft actuators for pathological tremor suppression.39,42 DEs offer some potential advantages compared with conventional actuators, including lower weight, decreased rigidity, smaller profile, and better scalability. However, due to the restrictions to the viscoelastic and stiffness characteristics of the actuator, the design is very complex. There are no prototypes and only rudimental simulation results are available.
Different from previous studies, a novel system named as soft exoskeleton for tremor suppression (SETS) was developed in this study. In comparison with the other semiactive actuators, the SETS system has advantages of both cylinder-piston damper and elastic fluid damper. It is equipped with a controllable flexible semiactive actuator (FSAA) based on MR fluid, which is the highlight of the system. The system can suppress wrist tremor in flexion/extension, abduction/adduction, and rotation in a semiactive manner. In addition, it can also suppress wrist tremor with two integrated hyperplastic blades in a passive manner. The overall system is characterized with low mass, compact design, comfortable wearability, as well as real-time adjustability to tremor with varying intensity.
Materials and Methods
The SETS system is designed according to the following requirements.
Assisting independent ADLs
PD and ET patients face a lot of challenges in ADLs such as drinking, eating, and writing. People suffering from pathological tremor often have difficulty taking care of themselves. It is clear that many patients have poor functional ability, but they may still be interested in engaging life activities independently. It is highly desirable to preserve their capability in a manner as natural as possible. As a result, the functional target for the exoskeleton is to assist patients to perform ADLs smoothly.
Minimization of volume and mass
Since the purpose of this device is to suppress the wrist tremor, it is beneficial to produce a wearable system with minimal mass. To make patients as tolerant as possible to our device, we set a weight restriction of the whole device within 300 g. This mass includes all items located on the back of the hand as well as any electronics and additional batteries that may be placed on the forearm.
Soft and flexible structure
A functional wearable robot must provide an adequate range of actions and multiple degrees of freedom (DOFs) to facilitate ADLs. The wearable exoskeleton should be designed in such a soft and flexible structure that can suppress tremor during voluntary movement with the least restrictions in a safe manner.
Providing damping force with quick response
For the design of exoskeleton, there are two types of functional expectations: (1) the ability to suppress pathological tremor and (2) the capability of permitting the real-time adjustability on the damping force.
System description
The SETS aims to suppress tremor for wrist joint with three DoFs and work along with six different wrist movements (flexion/extension, abduction/adduction, pronation/supination) as shown in Figure 1. The advantages of the SETS include high mobility and good real-time performance. The SETS system contains two portions for wrist tremor suppression. The medial and lateral components of the system are shown in the transparent view in Figure 1a. The wrist tremors can be suppressed in all directions by the FSAA according to the semiactive method (i.e., soft MR damper). The FSAA is the main component of the SETS system. In addition, the wrist tremors attenuated during pronation/supination by two hyperelastic (HE) blades based on a passive method. The FSAA is capable of suppressing tremor with the least effect on voluntary motions. The inertial measurement unit (IMU) and control unit is fixed on the dorsal side of the palm to estimate tremor in real time. The soft MR damper and control unit will be discussed in detail in the next section. Given the approach mentioned earlier, it is possible to suppress wrist tremor in all directions by SETS system that has been equipped with FSAA and two HE blades.

The configuration of the SETS system:
The control framework of SETS system is shown in Figure 2. The operating condition of the system is in accordance with the semiactive control mode. Damping force can be controlled in real time according to the IMU feedback. The IMU can collect tremor data from subjects or users.
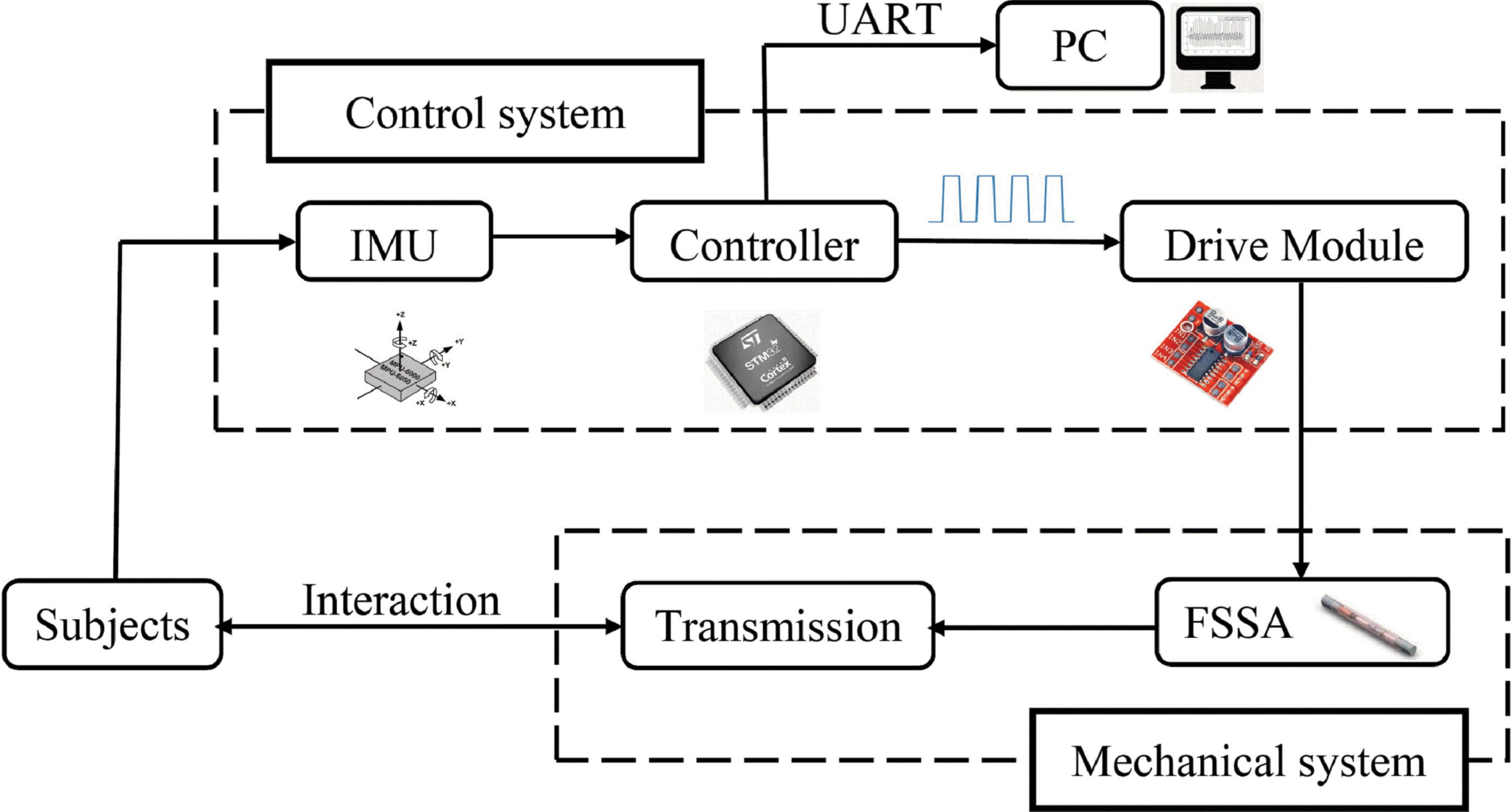
The control framework of the SETS system. Color images are available online.
MR damper design
MR fluid is a kind of smart fluid in carrier oil. Once exposed to a strong magnetic field, the fluid will become so viscous that it can turn into a viscoelastic rigid. Their fast and dynamic response makes them competitive to be used in the real-time active devices. In terms of the wrist, the minimum required force for wrist tremor suppression is about 8 N, and its frequency is between 3 and 12 Hz.1,43–45 Compared with the conventional dampers, resistance force of MR damper changes rapidly based on the current. The voltage sign and polarity of the electromagnet do not affect over the generated damping force. Furthermore, in contrast to active actuators that generate active force in the same orientation as the piston velocity, the semiactive actuator (MR fluid damper) generates resistance force that opposes the movement in all directions. Generally, the effect of MR fluid is described by the Bingham plastic model.43,45
The Bingham plastic model is known as one of the basic models assumed for non-Newtonian. It was suggested in 1985.
46
The shear flow constitutive relationship is used to analyze MR damper according to the Equation (1).47,48
where

The schematic representation of the concept design of the modular FSAA;
The FSAA was designed to match the motion of wrist joint. It can dynamically suppress unintentional motion related with pathological tremor. The FSAA mainly includes a silicone container, a flexible elliptic spring (piston rod), a piston head, a coil winding, a cylinder housing unit, and MR fluid (Fig. 3a). The FSAA is capable of suppressing wrist tremor with the least restrictions on the voluntary motion during flexion/extension, abduction/adduction, and rotation in a semiactive method. Moreover, the wrist tremor is also decreased during supination/pronation by two passive HE blades in passive method that is shown in Figure 3a.
In the MR damper, piston can press the MR fluid, while the piston moves in the cylinder housing (Fig. 3b). The pressure of the chamber will increase in one side of the cylinder housing. Therefore, the pressure difference will be generated between the two sides of the cylinder housing chamber. This process will cause fluid to flow. The schematic design and the simulation of MR fluid flow are shown in Figure 3c. The MR fluid's flow due to the pressure difference is called Poiseuille flow or differential pressure flow.
1
where
Therefore, the damping force by the piston is described as
where
The magnetic core is made from DT4E material (good demagnetization, low coactivity, and high permeability). The MR fluid is selected based on technical characteristics that have been presented in our previous article. 1 Generally, losing of the magnetic line takes place at the MR fluids area because the magnetic core permeability is more than that of the MR fluid. The magnetic line distribution was stimulated through the Ansoft Maxwell software. The simulation results are demonstrated in Figure 4.

FEM analysis of the MFD and flux lines distribution of the constructed MR damper model;
It should be noted that the initial damping force can be changed based on working gap adjustment. The FSAA includes a silicone cover with 0.5 mm thickness, a flexible rod with 40 mm stroke length, a piston with 6.2 mm rod diameter, and a cylinder with 20.65 mm bore diameter. A magnetic field in 1.6 mm annular gap is developed by means of a 480 turns copper. The diameter of the coil wire is 0.43 mm, which can keep the maximum current equal to 1000 mA. The impact of magnetic flux density (MFD) over the MR fluid is illustrated in Figure 4a and b while the thickness of the annular gap is changed from 3 to 1.5 mm, respectively. It shows that reducing the thickness of the working gap will cause an increasing damping force.
In addition, The J–A model is applied to demonstrate the magnetic properties of the core and magnetization curves. In J–A model, M(H) equation is given in the form of the following ordinary differential equation:
where k is the factor of proportionality and
where
The force and hysteresis curves for different currents/voltages.
In summary, the proposed FSAA is characterized with low mass, compact structure, soft and flexibility, high controllability, fast response, and low energy consumption.
Manufacturing of SETS System
Sensor and control module
For data collection of the wrist tremor motion, an IMU (STM32) sensor was used. The sensor and control modules were integrated into a 3 cm × 3 cm circuit board that can be placed on back side of palm. The sampling frequency is equal to 91 Hz. The acceleration range is equal to ±2 g and angular velocity range is ±1000°/s. The L298N is considered as a driving module of coil. A 3.7 V lithium battery powers the sensor and control module, and a 6 V lithium battery powers L298N. For analysis, a simple PC program was designed. The measurement data can be sent to the computer through the serial port, which can be shown in a real-time output curve. In this system, the original signal was filtered using a second-order band-pass Butterworth filter with a pass-band between 2 and 14 Hz. Before the analysis, the sensor data were de-averaged. The controller adopted the classic proportion-derivative control to deal with the angular acceleration and angular velocity of wrist joint. The time delay in the system is <0.1 s.
Soft flexible semiactive actuators
Some parts of SETS system, including wrist and palm brace, were three-dimensional-printed by means of stereo lithography appearance with a type of SOMOS8000 material. The material has high accuracy and good toughness characteristics. The manufacturing process of the exoskeleton is short and inexpensive. For the sealing and the flexibility of FSAA, a silicone cover and a flexible elliptic spring is used, respectively. The thickness of the silicone is important to the performance of the device. The silicone cover was made by the molding method. The thickness of silicone cover is 0.5 mm based on optimization. In addition, we use passive hyperplastic blades to suppress tremor during pronation/supination. These blades are located on the dorsal side of the hand and work based on passive methods. The prototype's total weight is ∼255 g.
Experimental Evaluation
For evaluation of the SETS system, the experimental tests are divided into three sections: (1) Demonstration of the mechanical characteristics of the system. (2) Verification of the capability of the system in signal acquisition and real-time response. (3) Verification of the capability of the system in suppressing tremor.
In Experiment I, we aimed to investigate the mechanical properties of the FSAA. To compare the performance of the SETS system in different situations (with/without MR fluid, with/without magnetic field effect, and with/without HE blade), Experiment II was carried out with a single subject. In addition, the signal acquisition capability of the system was investigated. Experiment III verified the device effectiveness, and five subjects participated in this experiment. All subjects signed the informed consent. The experiments were approved by the Ethics Committee of Shanghai Jiao Tong University. The experimental procedures conformed to the Declaration of Helsinki.
In Experiment I, the tensimeter and Tesla meter were used. In this experiment, initial damping force and MFD of FSAA were evaluated under varying voltages. The initial damping force is measured through a slow move of tensiometer whose accuracy is ±0.5%. The MFD of the core was also investigated in this experiment. The voltage of the DC voltage Regulator was generally and uniformly increased from 0 to 6V. The accuracy of the Tesla meter is
Regarding Experiment II, tremor was simulated by having one subject (male) swinging his wrist and the signal acquisition capability of the system was examined. The synthetic acceleration was calculated to be analyzed during the three different situations (with/without MR fluid, with/without power effect). The zero-mean method is also used to preprocess the data. The IMU sensor and control panel is located on the back side of the palm (Fig. 1a). To compare the results, we use the spectrum distribution, the mean absolute value (MAV), and the root mean square (RMS) values of the signals. The sampling frequency of system is 91 Hz and the measurement data are sent to the computer through serial port.
In Experiment III, five male healthy subjects, aged between 25 and 35 years, participated in the study, their hand length was in the range of 18–19 cm. The wrist motion is flexion/extension (Fig. 5). The participants were asked to wear blind folds during this experiment. The subjects swing their wrists at 2–8 Hz frequency and keep it constant as much as possible. For each subject, the experiment lasted for 10 s. Within the first 5 s, the exoskeleton was in monitoring mode, and the following 5 s it is in suppression mode. The monitoring mode was called the situation in which the control system was powered off and the suppression mode was named when the control system was switched on. During the experiment, the mode was switched without any notice. The performance of the mechanism was compared between the two modes.

The setup of Experiment III. Color images are available online.
Results
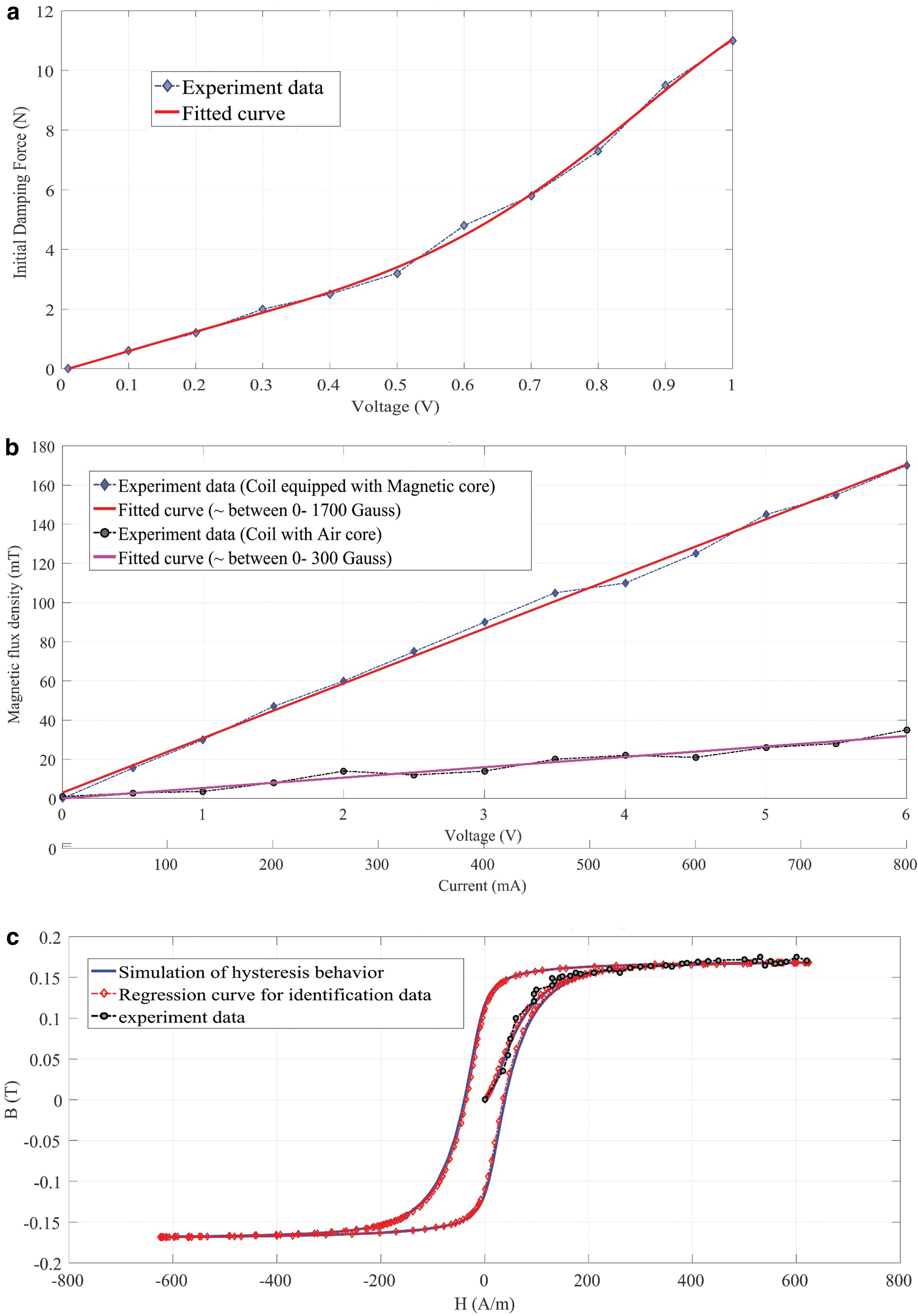
For Experiment I, the initial damping force of the system under varying voltages is illustrated in Figure 6a. As can be seen from the figure, the relationship between voltages and damping forces is nonlinear. The figure demonstrates a positive relationship between the two properties. The FSAA generates a damping force close to 0 N when the control voltage is low. It shows the impact of the system is at a minimum level on normal movement during ADLs. When the control voltage reaches 1 V, the provided damping force is about 11 N that is sufficient to achieve tremor suppression. In this experiment, the current was lower than the coil's safe load current. The results of Experiment I show that the SETS system can provide a small initial damping force at a low control voltage and that the range of the generated damping force is sufficiently broad for tremor suppression.
In addition, the MFD of coil of FSAA is shown in Figure 6b under varying voltages. It shows a positive linear relationship between voltage and MFD. The MFD output for magnetic core, under low voltage, is close to 0 mT. If the voltage reaches 6 V, MFD output can reach ∼170 mT. In similar conditions, MFD with air core changed from 0 V to 35 mT.
The results of this experiment confirm an acceptably small MFD for the coil under the low voltage/current and that the range of the MFD for the coil is sufficiently broad for tremor suppression. In addition, the J–A model was applied to demonstrate the magnetic properties of the core and magnetization curves. The magnetization curve is a diagram representing changes in the situation of a magnetizable material with magnetizing H and magnetization induction B. A magnetization curve plots the correlation between the MFD (B) and the magnetic field strength (H).49,50
In Experiment II, there was only one test subject. The findings are provided in Table 1. For the subject wearing SETS, the MAV and RMS values of acceleration in the three different situations are measured: without MR fluid, with MR fluid (off), and with MR fluid (on). Note that “on” and “off” indicate the magnetic field is “applied” and “not applied,” respectively. Experiment II illustrated the performance of the system in the three different situations. Figure 7a and b presents the original signal and the spectrogram of sensor of the system for three situations. In Figure 7b, it can be seen that the tremor signal is mostly concentrated within the range between 5 and 8 Hz. The maximum value is ∼7.2 Hz. In addition, wrist tremor also diminished during pronation/supination by two hyperplastic blades in passive method. The blades are located on the dorsal side of the hand. Figure 7c and d shows the original signal and spectrogram with/without hyperplastic blades. The size of the blades that were used in this experiment is 15 × 5 × 0.5 mm.

The original signal and the spectrogram during flexion/extension;
The Acceleration Data for Three Different Situations
MAV, mean absolute value; MR, magnetorheological; RMS, root mean square; SETS, soft exoskeleton for tremor suppression.
In Experiment III, the data of the three-axis acceleration were collected by the IMU sensor that was mounted on the back side of the hand. We chose only the channel with the largest averaged RMS value to analyze. The results of Experiment III are illustrated in Figure 8. It can be concluded that the acceleration and the angular velocity of wrist joint decrease significantly while the device switched from the monitoring mode to the suppression mode. Tables 2 and 3 present the comparisons in detail. The results show the MAV acceleration reduces by 61.82% and that the absolute average angular velocity reduces by 58.85%. The RMS value of the acceleration decreases by 61.89% and the RMS value of the angular velocity decreases by almost 56.22%. The findings show that tremor can be suppressed significantly with the SETS system. The time-domain and the frequency-domain distribution of acceleration and angular velocity are shown in Figure 9a and b, respectively.
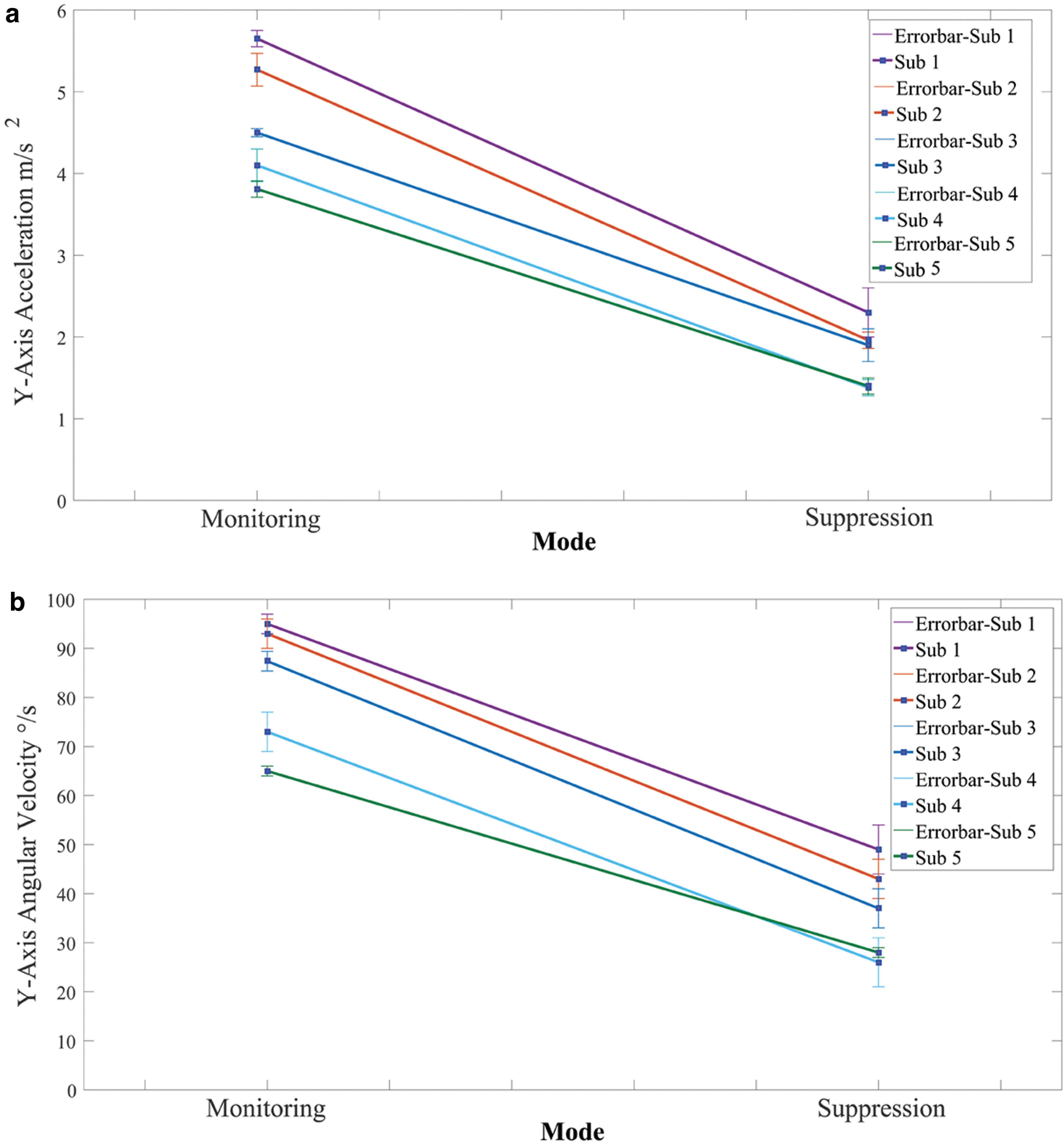
The acceleration and angular velocity of wrist joints from five subjects in monitoring mode and suppression mode;

The time-domain and frequency-domain distribution of data measured in monitoring mode and suppression mode;
The Acceleration Data of Five Subjects
The Angular Velocity Data of Five Subjects
Tremor attenuation can be observed from the spectrogram. The performance of the system can be later optimized by designing the working gap of the MR damper through the process improvement methods. In the future, more experiments on patients will be performed. Finally, it is concluded that SETS system equipped with FSAA can remarkably suppress wrist tremor.
Discussion
Semiactive method for tremor suppression
In this study, a soft exoskeleton for tremor suppression called SETS system for wrist joint is developed. The SETS system is equipped with a real-time controllable FSAA based on MR fluid, which is the highlight of the system. The SETS system is a combination system based on the previous major classes of the fluid semiactive actuators (both cylinder-piston damper and elastic fluidic damper). The aim of the new system is to overcome the drawback of previous study while preserving the major advantages of the fluid damper approach. Wrist tremor can be suppressed by the SETS system in flexion/extension, abduction/adduction, and rotation in semiactive method. As the main component of the SETS system, the FSAA has some particular advantages over the other traditional classes of semiactive actuators.1,5,15 These advantages include its flexibility, light weight, and real-time adjustability. Simulation studies and experimental tests were carried out to prove and validate the design. The advantage of the SETS system is its possibility to safely and actively interact with voluntary motion of users compared with the previous rigid-body exoskeletons. It does not affect voluntary movements. The system is designed based on compliant user–robot interaction that we think is very important in wearable human–machine systems.
Passive method for tremor suppression
The SETS system is integrated with the passive mechanism that includes two hyperplastic blades and a sliding (prismatic) joint. The results show that the HE blades assist the SETS system in wrist tremor suppression during pronation/supination in passive methods, (Fig. 7c, d). This is another highlight of the design. The blades provide hand movement during flexion/extension, abduction/adduction by 65° and 25°, respectively, with the least restrictions in the voluntary motion. The blade movement direction is shown in Figure 10.

The structure of the passive mechanism:
Significant factors influencing system performance
As mentioned earlier, the functional wrist exoskeleton for tremor suppression must provide an adequate range of different DOFs to facilitate ADLs. Although some previous designs can provide acceptable functionality, they are bulky and heavy, which limits their portability and application in practice. The SETS system equipped with FSAA is devised to overcome such drawbacks. Three experiments were carried out to evaluate the performance of the system.
Experiment I demonstrated a small initial damping force at the low-level voltage and a broad adjustable range of damping force. Experiment I included two sections. In the first section the output damping force could reach nearly 11 N that was efficient to suppress wrist tremor. As expected, the magnetic field modification of the coil can significantly alter the damping force of the FSAA. A good agreement can be observed between the quantity predicted by theoretical simulation and the measured damping force when the losses and the friction in the magnetic field of the coil were considered. The simulation results show the working gap has a good potential for losing the magnetic field at a high level. The evidence highlights the importance of optimizing the coil size. The optimal working gap found in our setup is about 1.6 mm. It should be noted that the initial damping force can be adjusted with the working gap. Since the working gap may affect the voluntary movements due to high initial damping forces, the working gap must be >1 mm. In our research, we also find the thickness of the silicone to be important to the performance of the SETS system. It was chosen to be 0.5 mm in our design. A thickness of >0.5 mm may increase the initial damping force, which may lead to an opposite force against the voluntary movements. The effect of different thickness (0.1, 0.3, and 0.5 mm) of HE blades has also been examined during pronation/supination of wrist joint. The results demonstrate the higher thickness of the blades can improve the performance of SETS on suppressing tremor. In the second section of Experiment I, the changes of the MFD of the coil in FSAA was investigated under varying voltages. The results show a positive linear relationship between the voltage and the MFD. Results also show the MFD has a strong effect over the MR dampers with small working gap. However, the effect of the MFD over the performance of the SETS system also depends on several other factors, including the MR fluid material, the influence of the electromagnet on materials (including nonlinear saturation and permeability), and the cylinder-piston size. These factors play an important role in affecting the tremor-suppressing force generated by the system. The results of the second section of Experiment I verified an acceptable MFD of the coil under low voltage/current and a broad adjustable range of the MFD. In addition, the hysteresis behavior of the coil validates the second section of Experiment I.
The signal acquisition capability of the system was investigated in Experiment II. It demonstrates the capability of the system to acquire data. Experiment III verifies the device effectiveness in suppressing tremor.
The results demonstrate the effectiveness of the SETS system in suppressing tremor in three DOFs with few restrictions in voluntary movements. In future, we will consider optimizing the system with the Taguchi method. The functional performance of SETS is only validated on healthy subjects at present, and the clinical experiments on patients will be conducted in near future.
Comparison to existing commercial products
Despite a lot of research on active and semiactive methods to tremor suppression, there are very few commercial devices available at the markets. The GyroGlove is a commercial wearable technology currently in development to increase hand stability. Gyroscopes within the glove are used to counteract hand tremors to restore the confidence and ease of daily tasks. However, it severely slows down the voluntary motion. Also, the mechanism of the GyroGear is completely different from the MR damper mechanism and the proposed model in this article. The Liftware Company has a product, Liftware Steady. It is an electronic stabilizing handle and a selection of attachments that include a soup spoon, everyday spoon, fork, and spork. Liftware Steady is designed to help people with hand tremor, which may be related to Parkinson's disease or ET, eat more easily. However, Liftware Steady is only suitable for feeding tasks, and it is incompetent to other hand-related functions in daily life. There are some other products that can suppress tremors through passive methods, including Readi-Steadi and Tremolo. Readi-Steadi is a glove with the extra weight (inertial load) added to the top of the hands, some devices with energy absorption. Tremolo is a sleeve with two to four vibration absorption panels (tuned mass dampers) fitted around a patient's wrist. Tremelo is only effective with ET, but not PD. It is well known that passive methods may affect voluntary motion, and it cannot adapt to the changing tremors.
The SETS system in this study is expected to become commercial products in future because of the light weight, compact design, comfortable wearability, as well as real-time adjustability to tremors with varying intensity. Moreover, it does not interfere with the voluntary movements during tremor suppression.
Conclusion
In this study, we developed the SETS system characterized with low mass, compact design, comfortable wearability, as well as real-time adjustability to tremor attenuation with varying intensity. A novel FSAA is designed, which combined the two traditional types of semiactive actuators (cylinder-piston actuator and elastic fluid actuator). The overall system weighs ∼255 g and can yield a maximum damping force of about 11 N. Simulation and experimental tests were carried out to evaluate the performance of the system. The key results show that the magnitude of acceleration and angular velocity of wrist tremor could be reduced by 61.39% and 56.22%, respectively, which validate the good function of SETS on tremor suppression.
Footnotes
Acknowledgments
The author thanks all the subjects for participating in the experiments.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Key R&D Program of China (2018YFB1307301), the National Natural Science Foundation of China (No. 61761166006, No. 91848112), and the Shanghai Municipal Commission of Health and Family Planning (No. 2017ZZ01006).