
Abstract
The advent of soft robots has solved many issues posed by their rigid counterparts, including safer interactions with humans and the capability to work in narrow and complex environments. While much work has been devoted to developing soft actuators and bioinspired mechatronic systems, comparatively little has been done to improve the methods of actuation. Hydraulically soft actuators (HSAs) are emerging candidates to control soft robots due to their fast responses, low noise, and low hysteresis compared to compressible pneumatic ones. Despite advances, current hydraulic sources for large HSAs are still bulky and require high power availability to drive the pumping plant. To overcome these challenges, this work presents a new bioinspired soft and high aspect ratio pumping element (Bio-SHARPE) for use in soft robotic and medical applications. This new soft pumping element can amplify its input volume to at least 8.6 times with a peak pressure of at least 40 kPa. The element can be integrated into existing hydraulic pumping systems like a hydraulic gearbox. Naturally, an amplification of fluid volume can only come at the sacrifice of pumping pressure, which was observed as a 19.1:1 reduction from input to output pressure. The new concept enables a large soft robotic body to be actuated by smaller fluid reservoirs and pumping plant, potentially reducing their power and weight, and thus facilitating drive source miniaturization. The high amplification ratio also makes soft robotic systems more applicable for human-centric applications such as rehabilitation aids, bioinspired untethered soft robots, medical devices, and soft artificial organs. Details of the fabrication and experimental characterization of the Bio-SHARPE and its associated components are given. A soft robotic squid and an artificial heart ventricle are introduced and experimentally validated.
Introduction
Soft robotics is an emerging field that is expected to bridge the gaps left by their hard predecessors.1–4 It is true that hard robots are poor at adapting to uncontrolled environments, and generally, the more complex the environment, the more complex the robot and its control method.2,5–11 However, while soft robotics carry added flexibility and compliance, this implies greater instability due to low stiffness and nonlinear deformation of the materials that cannot produce the same force as their hard counterparts.8,9 One rapidly evolving field of soft robotics is soft artificial muscles (SAMs), which aim to mimic biological muscles.
Currently, SAMs can be actuated through methods such as electric energy, thermal energy, magnetic energy, and pressure generation.12–15 Electrically driven SAMs have been implemented in the form of electroactive polymers,16,17 electromagnetic actuators,13,18 and dielectric elastomer actuators. 19 Thermally driven SAMs include shape memory alloys 20 and polymers. 21 However, their application in robotics is limited due to the use of high voltages (several kVs). The pressure driven SAMs, in contrast, typically use fluids as the pressurized medium (air, liquid), which offers cheap and high-powered actuation. Some of the common fluid-driven actuators include pneumatic artificial muscles (PAMs), inverse pneumatic artificial muscles (IPAMs), and fluidic elastomer actuators (FEAs).15,22–24
PAMs are a class of soft actuators that consists of an elastic tube or bag (silicone or latex) wrapped in a woven sheath. A classic example of a PAM is the McKibben muscle, which can operate at 40–50% strain. 25 IPAMs are another class of actuators where they lengthen under pressurization, storing elastic energy in the vessel, then upon depressurization the stored energy is used to contract the muscle. Such actuators have attained strains of up to 300% (under no load). 25 Other hydraulic filament artificial muscles (HFAMs) have been introduced in Thai et al., 10 Phan et al., 24 Thai et al., 26 and Davies et al., 27 whereby a steel spring restricts the radial expansion of the inner tube instead of a fabric sheath. These muscles generate more contractile force when elongated, combining the tube's elasticity and the spring's tensile force.
In addition, they could theoretically provide long muscle length (up to 5000 mm) and at small size (<1 mm in diameter), and could achieve 246.8% strains. 24 Zhu et al. 23 introduced a new fluidic fabric muscle sheet by stitching the silicone tubes into fabric sheets to achieve complex bending motions. FEAs are another class of fluid-driven actuator where its body consists of synthetic elastomer, restricted by a flexible but inextensible layer, with pockets that can be pressurized by any fluid, fed by embedded channels. 1 These actuators are also called pneumatic networks where robots built using this actuation method are light, strong for their weight, and impact and crush resistant.
Fluid choice is a key factor in the performance of any fluid-driven SAM, and typically this choice is between pneumatics and hydraulics. 28 For portable soft robotic systems, generally pneumatic pressure is produced by battery-powered microcompressors, which can be configured in series or parallel, or with compressed gas cylinders.28–30 However, there are several drawbacks to pneumatics that hydraulic pressure generation can solve. The compressibility of air has a severe hindrance on position control of soft robotic systems due to high nonlinear hysteresis. In contrast, hydraulic fluids are considered incompressible and therefore displacement can vary linearly with pressure.28,30–32
Focchi et al. 31 demonstrated that this incompressibility also lends itself to higher pressure or force capabilities, lower noise, and faster responses than its pneumatic counterparts.28,31,33 They can respond at 50 times higher than the speed of pneumatics. 34 Hydraulic actuation was able to produce over double the efficiency for energy conversion (53.3% compared to 19.1%) than pneumatic actuation.28,35
Existing hydraulic pressure is generally generated by mechanical pumps, including rotary pumps such as gear, vane, screw, and centrifugal pumps, and reciprocating pumps such as diaphragm, plunger, and piston pumps. Piston pumps or hydraulic syringes have some of the highest operating efficiencies, especially at high pressures. 36 They are often driven by linear motors in soft robotics, which can be controlled at high accuracy level.37–40 This control lends itself, naturally, to precise position control and therefore good modeling capabilities when they are integrated into robotic systems.
Despite advances, a hydraulically driven soft robotic system must carry a fluid reservoir with sufficient or even large volume to actuate soft robotic bodies. It follows that, the larger the robotic system, the larger the fluid reservoir required to supply it, coupled by the increase in the size of pumping equipment. This is a key concern in the design of wearable and implantable soft robotic devices as weight and bulk are prohibitive factors in some cases.
To address the need for small hydraulic driving sources that can be used to control large soft robotic bodies, this article presents a new concept of a bioinspired soft and high aspect ratio pumping element (Bio-SHARPE) capable of amplifying its small input hydraulic volume to produce a high output volume. This input-output volume amplification naturally comes at a sacrifice of input-output pressure reduction. While the pumping element still requires an additional upstream hydraulic pump, this new soft pumping element has the potential to solve this compounding scalability issue for a range of applications. We have used a syringe-based piston pump to drive the Bio-SHARPE to simplify its characterization. To validate the concepts, the Bio-SHARPE and its associated elements will be characterized in terms of its amplification ratio and peak pressure generation to assess its controllability.
To demonstrate the usefulness of the Bio-SHARPE and its versatility, the soft pumping element will be integrated into several soft robotic systems, including a soft robotic squid that can generate jet propulsion to perform locomotion within a water tank. In addition, it will be used to develop a unidirectional and pulsatile soft pump with integrated duckbill valves that can perform the pumping function analogous to a human heart ventricle. Some potential application areas of the Bio-SHARPE are illustrated in Figure 1.
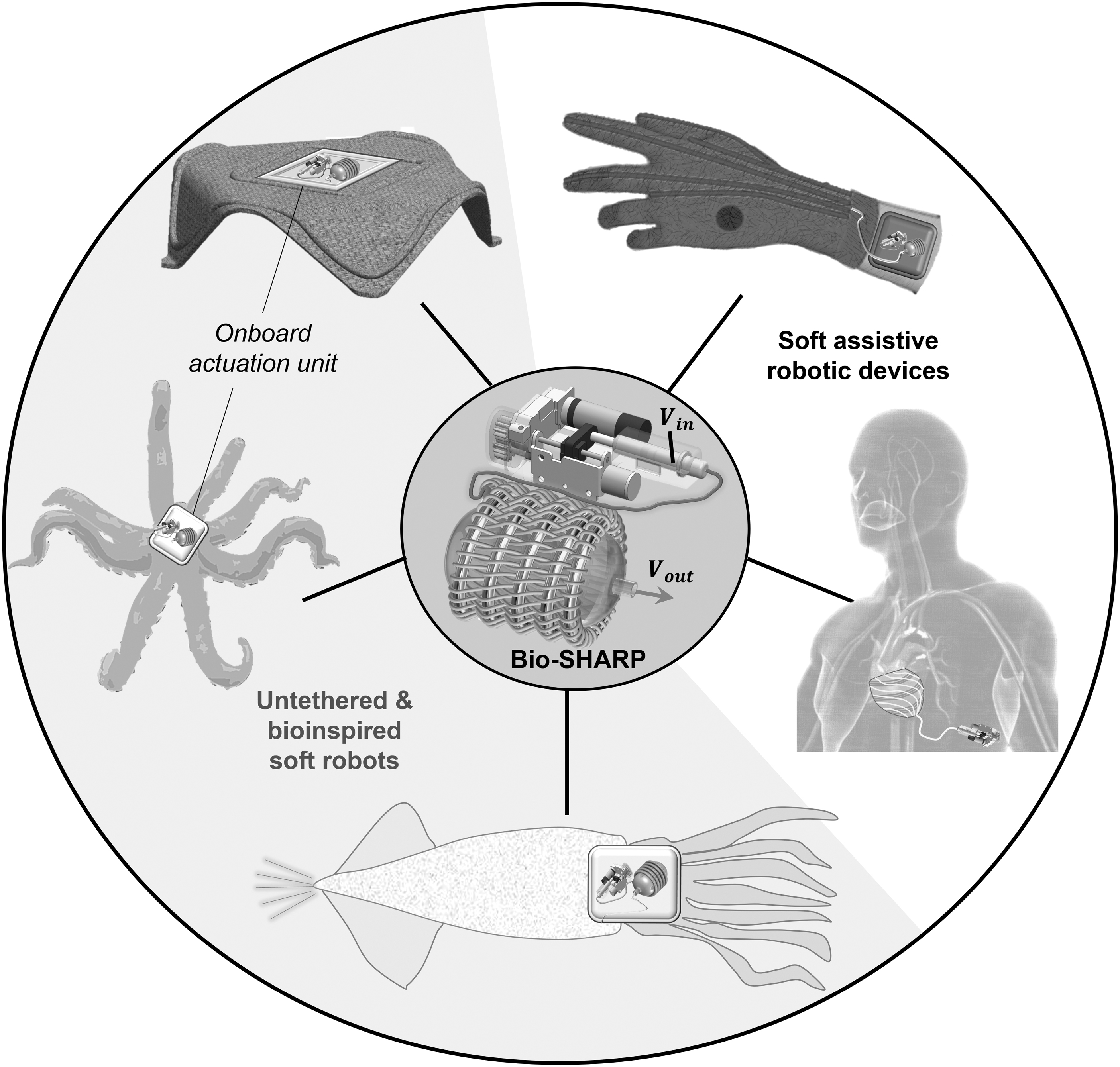
The high aspect ratio soft pump can be used as compact driving hydraulic source for untethered and bioinspired soft robots and assistive devices, which require high hydraulic volume to control their large body.
Materials and Methods
Design concept and working principle
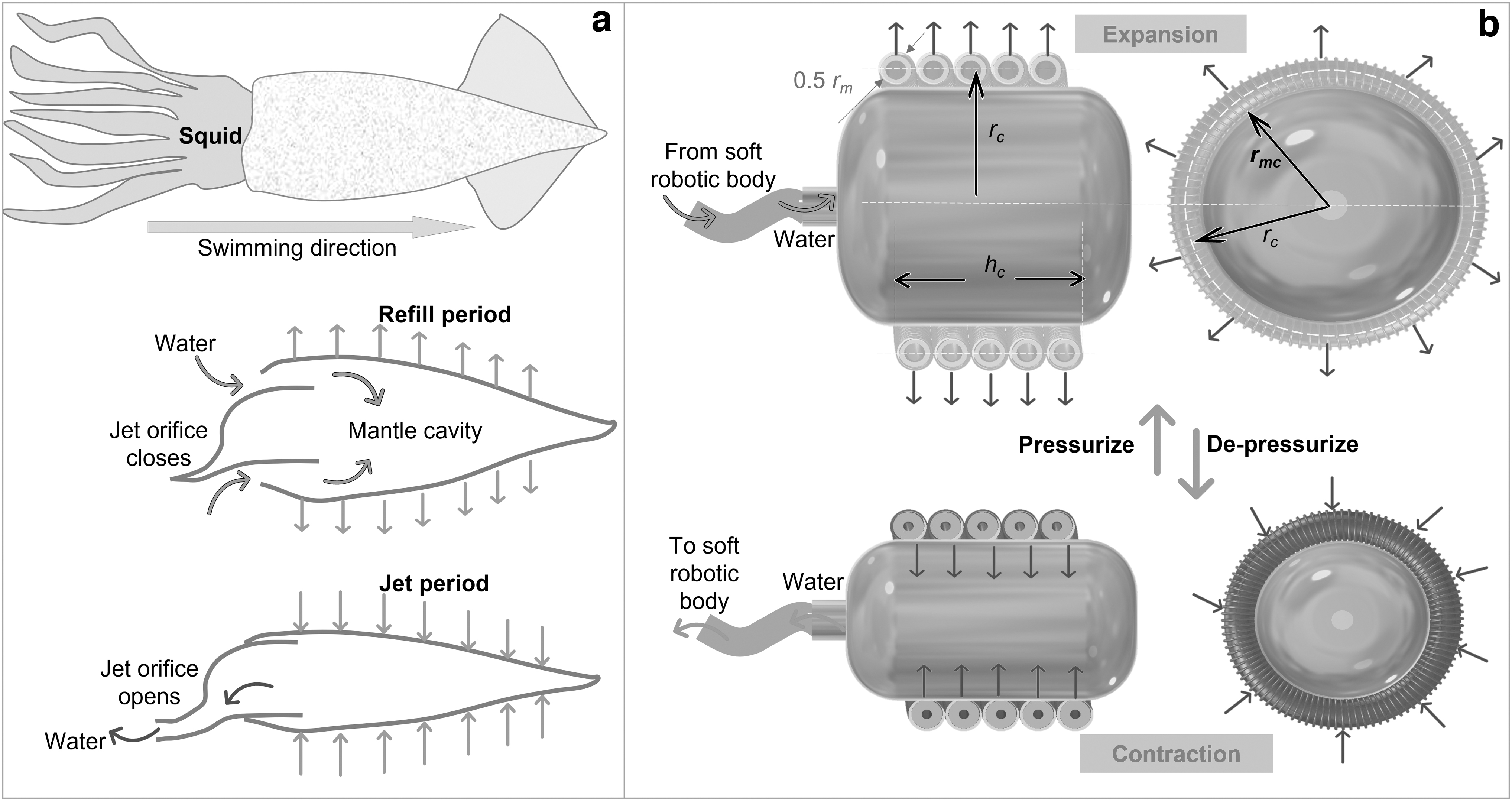
Inspired by the jet propulsion mechanism in cephalopods (sea-dwelling squids or octopuses) where rhythmical expansion and contraction of elastic cavity in their body generate the periodic formation of pulsed water jets, 41 we develop a bioinspired Bio-SHARPE that can amplify a small input hydraulic volume to produce a large output hydraulic volume at desired pressure for potential use in untethered soft robotic applications (Fig. 1). The fundamental component of the Bio-SHARPE is a soft tubular element (or soft pumping element), which is a type of spiral-shaped cavity (SSC) formed from weaving a long HFAM 26 with nonstretchable yarn, or alternatively could be created by three-dimensional (3D) printing technology using a rib structure. Justification for the use of a yarn supporting structure can be found in the Section 6 of Supplementary Data.
The main cores of the long HFAM are an elastomeric inner rubber tube, a radially constricting and axially outer helical coil, and a fluid transmission tube. To form a long soft muscle, we used an insertion method where the inner rubber tube was inserted into the channel of the helical coil, sealed at one end, with a fluid transmission tube connected to its other end. Compared to conventional approaches of manually wrapping nonstretchable fiber along the inner silicone body, the use of an insertion fabrication method can produce a long artificial muscle at any size down to 0.8 mm and also avoid nonuniform distribution of the fiber as an outer constrained layer.
The new SSC, under an applied hydraulic pressure, can induce radial expansion or contraction to change its inner cavity volume (Figs. 2 and 3). Detailed fabrication and working principle of the SSC and soft muscle is shown in Supplementary Data. The key advantage of the soft pumping element is that it can amplify its output volume or the volume within the SSC, with respect to its small input fluid volume, or the volume of liquid within the muscle forming the coil. By varying the contraction ratio for the SSC, the small input hydraulic volume

Fabrication process for the Bio-SHARP using a weaving design. A SSC formed from a long soft hydraulic fiber artificial muscle is weaved with commercial yarn to create the soft pumping element. An elastic mantle cavity which contains a hydraulic element (water) is inserted into the soft pumping element to form the Bio-SHARP, which can amplify m times of the input hydraulic volume
Working principle of the Bio-SHARP with its soft pumping element.
Analytical models for the volume amplification and compression force estimation
To describe the relationship between the input hydraulic volume supplied to the soft hydraulic muscle
Model Variables and Their Descriptions
The output fluid volume
Figure 4 shows the overview of the SSC structure and its configuration when wrapping around the elastic mantle cavity. The compression force

Elongation and force generation of the long, soft hydraulic muscle and its wrapping configuration around the elastic mantle cavity.
Experimental Characterization and Applications of the Bio-SHARPE
The performance of the Bio-SHARPE closely relies on the stability of the soft pumping element or the SSC, which is wrapped around the elastic mantle cavity. To stabilize the SSC, two methods have been used. The first method was to weave the SSC with commercial yarn to form a soft tubular muscle (Figs. 2 and 3). The weaving yarns mainly prevented the spiral structure of the soft hydraulic muscle from returning to its straight resting state. The predicted effect of the use of yarn to stabilize the coil has been discussed in the Supplementary Data (Supplementary Fig. S1). The second method was to use 3D printed elements or rib designs arranged in quadruple configuration where the long soft hydraulic muscle was inserted into the rib holes (Fig. 5c). To demonstrate the capability of the Bio-SHARPE, different prototypes and robots were created and experimentally validated.

Prototypes of the one-way duckbill valve and the Bio-SHARP.
Soft pumping element characterization
The amplification capability of the soft pumping element was examined in terms of its relationship between the hydraulic input and output volume as well as the input volume/pressure and output force/pressure, respectively. Although the amplification ratio of the input volume to the output volume is the key advantage of the Bio-SHARPE, it is also important to investigate the tradeoff of the ratio between the input and output pressure. Detailed experimental setup (Fig. 6) and experimental condition is shown in the Supplementary Data. Figure 7 shows the results for the input and output volume characterization where the experimental data are the average value of five trials.

Experimental setup to characterize the soft pumping element.
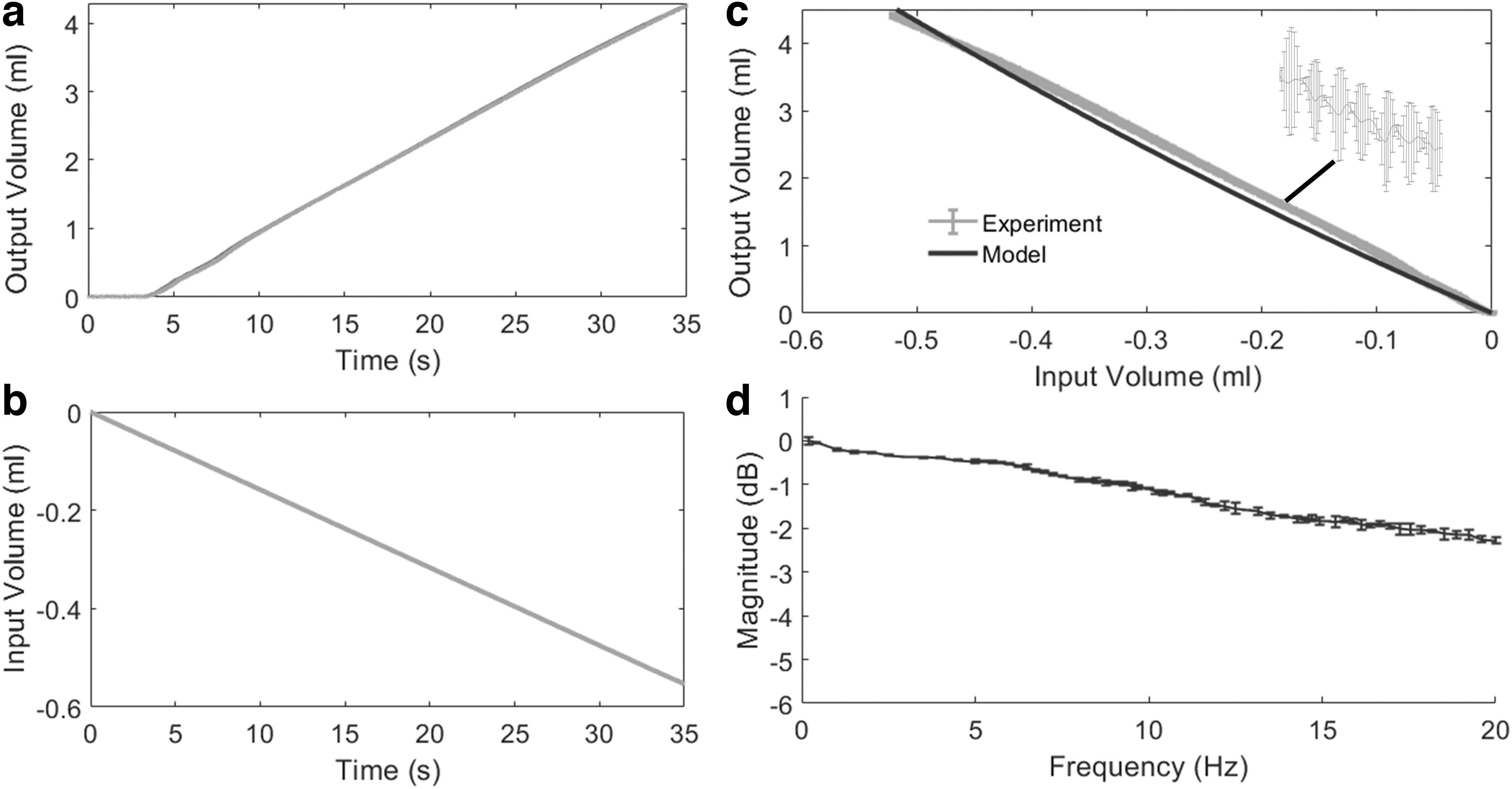
Experimental results for the input and output volume of the soft pumping element.
It is noted that there is a lag period between the beginning of the input volume decrease and the beginning of movement of the output syringe, which was converted into output volume. This lag can be explained by the static friction that existed in the output syringe and the deformation of the soft rubber cap of the plunger at the beginning of each test. Once the pressure in the elastic mantle cavity reaches a threshold, the static friction and elastic deformation of the rubber cap are eliminated where a linear relationship between the input and the output volume is achieved. We also validate the developed model given by Eq. (1) where the model parameters are
We performed curve fitting of the output and input volume relationship and the result revealed that the amplification ratio of output volume gain to input volume reduction was approximate
Experimental results (Fig. 7d) revealed that the soft hydraulic muscle responded to increasing frequencies with only a slight decline in gain (−2.2 dB at 20 Hz) with a bandwidth of at least 20 Hz (our mechanical testing system was limited to this upper frequency). This frequency response characterization was conducted on a straight soft hydraulic muscle, to give an indication of the bandwidth capabilities of the active component of the pumping element. Bandwidth characterization of the pumping element itself was not possible with our current testing systems. More details of this experiment can be found in the Supplementary Data.
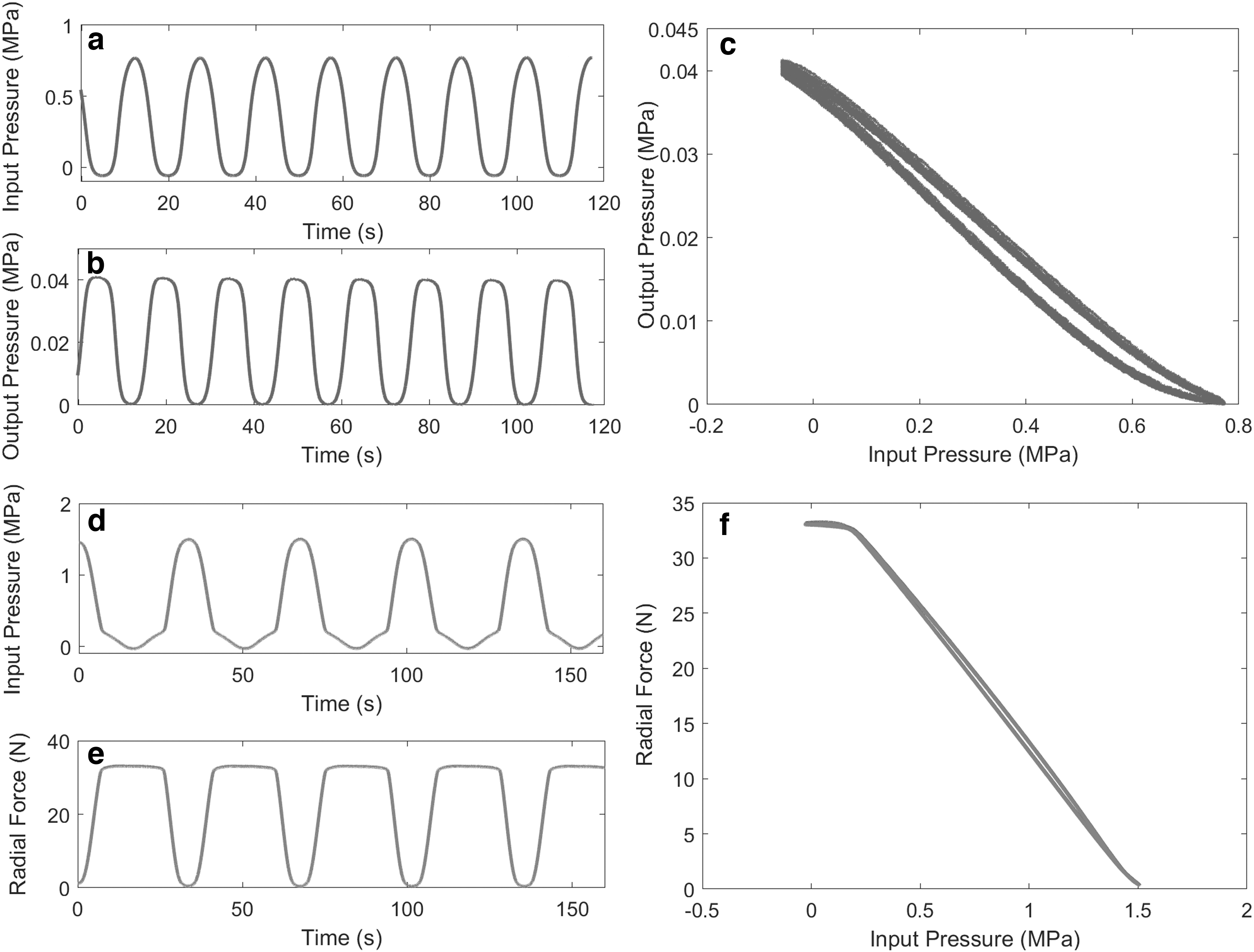
Another important characteristic of the soft pumping element is the input and output pressure relationship as well as the relationship between output force generated by the soft pumping element with respect to the applied input hydraulic volume and pressure from the miniature hydraulic syringe. With such a large amplification ratio, it was expected that there would be a trade-off in pressure generation. We also conducted experiments (setup is shown in Fig. 6; Supplementary Data). Figure 8a–c reveal the results for the input versus output pressure characterization, where the peak output pressure recorded was about 40 kPa from a drop of 0.765 MPa in input pressure of the miniature 1 mL syringe. During the experiment, the total input volume
Hydraulic pressure and compression force characterization for the soft pumping element.
Unlike the input versus output volume experiment, there was a hysteresis profile between the input pressure and the output pressure. This can be explained by incomplete removal of the compressible air bubbles within the soft hydraulic muscle and the elastic mantle cavity. These results are specific to the current design of the SSC, which was decided arbitrarily.
The experimental results (Fig. 8d–f) show that the soft pumping element could generate a compression force up to 34.2 N, which is equivalent to a negative change in the output pressure of 1.5 MPa generated by the miniature syringe. The results also reveal that there is a small hysteresis loop with an approximately linear trend between the measured radial force and the input pressure. However, there is a slightly nonlinear region at the beginning of constriction. This can be explained by a slight deformation of the soft pumping element when it tightly grips the cylindrical jig. To mitigate this nonlinear affect, the removal of any deformation materials is highly desired. Figure 8f also shows that there is a dead zone in the radial force at low input hydraulic pressures.
We hypothesized that this unexpected result was due to contact loss between the inner surface of the constrained coil element and the outer surface of the rubber tube of the soft hydraulic muscle. This can be explained by an initial pretension applied to the inner rubber tube at the time the soft hydraulic muscle was fabricated. In brief, when the pressure of the hydraulic element (water) inside the rubber tube approaches zero, the rubber tube's outer diameter becomes smaller than the constrained coil's inner diameter, making a loose contact between the rubber tube and the constrained coil. To overcome this effect, the initial pressure applied to the soft pumping element should be set to a predetermined greater than zero level.
In addition, preliminary investigations into the effect of mantle material have been undertaken and presented in the Supplementary Data (Supplementary Fig. S2). This preliminary work will serve to guide future works, but it is out of the scope of this article's main findings.
Analytical modeling predictions
Our developed analytical models are capable of predicting trends in input-output volume and pressure given changes to certain geometric and material parameters and will be used to inform future experimental work on this pumping element. Figure 9a shows the predicted effect of increasing the number of turns in a constant height and radius coil on volume amplification. By decreasing the number of turns, we are essentially shortening the initial length of the muscle fiber used to create the coil. By virtue of this alteration, a coil with fewer turns will change its internal volume more than a coil with more turns when the same change in input volume is applied. In this way, the amplification ratio of our pumping element increases with decreasing coil turns.

Modeling predictions from developed equations.
It should be noted that this modeling operates on the assumption that there are no external forces acting, and that the mantle cavity remains cylindrical throughout pumping cycles. Clearly, by decreasing the number of coil turns, while keeping the coil height and radius constant, the coil pitch height
Figure 9b shows the predicted effect of increasing the initial coil radius
Figure 9c reveals the predicted effect of increasing the number of turns in a constant height and radius coil on the input-output pressure relationship. This modeling represents the blocked-elongation force capabilities of our pumping element. That is to say that the muscle coil is pressurized to reach the right diameter to fit over the mantle cavity of a constant radius. Then the muscle is depressurized assuming the mantle is incompressible. The result is a representation of the minimum and maximum pressure that can be applied to the mantle, which is represented here as “Coil Pressure.” We can clearly see that the peak pressure our coil is capable of applying increases with the number of turns in the coil. This must be balanced against the increased input pressure required to bring the coil to the correct radius, which grows with the number of coil turns.
Figure 9d and e reveal the predicted effects of increasing the muscle fiber's inner tube elastic modulus and outer coil spring constant, respectively, on the input-output pressure relationship. This modeling relies in the same blocked-elongation assumptions as mentioned before, while keeping all other model parameters constant. Clearly, increasing the elastic modulus or the spring constant will increase the peak pressure that our pumping element can output. However, as before, this will increase the input pressure required to reach a certain constant mantle diameter.
Finally, Figure 9f shows the predicted effect of decreasing the muscle's initial inner tube radius
Bio-SHARPE driven soft robotic squid
Recent works on soft robots have been mostly inspired from biology to mimic the softness and flexibility of soft creatures such as cephalopods (octopus or squid) or jellyfish to adapt to complex and unstructured environments while avoiding the use of rigid skeleton.2,3,9,41–43 To demonstrate the capability of the new Bio-SHARPE, we developed a bioinspired soft robotic squid that can perform locomotion through jet propulsion (Supplementary Video S1). An overview of the soft robotic squid is shown in Figure 10a. Detailed fabrication is shown in the Supplementary Data. Similar to the jet propulsion of the natural squid (Fig. 3a), when contracted, the SSC crushes the bladder and forces the internal water out of the jet nozzle, propelling the soft robotic squid forward.

Working principle and component diagram of the soft robotic squid.
When the SSC expanded, the bladder reformed to its original shape using the restorative elasticity of the thermoplastic polyurethane (TPU), which sucks the water into the valved inlet and the jet nozzle, filling the bladder for its next contraction. The duckbill valve was integrated at the head of the squid to ensure that it would not be pulled backwards on each expansion phase and to increase the rate at which the bladder was filled during this phase, while forcing all ejection volume out of the jet nozzle. To reiterate, the purpose of fabricating this bioinspired soft robotic squid was to provide proof of concept for the application of the Bio-SHARPE into representative robotic systems. Therefore, the soft robotic squid was not tested rigorously nor was optimally designed. The testing and optimization of these robotic systems may be warranted in future work, but it is out of scope of this article.
In terms of experimentation, the squid was demonstrated to swim horizontally in a water tank, with video recording used to determine the distance travelled in one contraction phase. Its jet propulsion was also visualized through the video recording where blue food die was ejected from its compression chamber. Figure 10b shows the results of the frame-by-frame analysis of the squid's position in the water with a single contraction of the soft pumping element. These results reveal that the squid in its current or unoptimized form could travel about 1.3 body lengths (55 mm) in 1 s powered by a single muscular contraction. At the start of the contraction, the squid accelerates before decelerating at the end of the motion as one might expect. In fact, the squid had moved nearly an entire body length by around 500 ms.
This indicates that if the contractions could be timed correctly, a new contraction could begin before the squid's speed had decreased significantly, which would help to maintain a near constant speed through the water. The water jet from one contraction was also visualized using blue food die. Figure 10c shows a clear and defined jet propulsion where the water was ejected from the soft robotic squid nozzle with no perceived leakage from any other part of the squid, thanks to the one-way duckbill valve at the front. During the experiment, the fluid transmission tube was held at the furthest point away from the soft robotic squid toward the input syringe. This was done to avoid the tube affecting the motion of the squid as much as possible.
Soft pumping element-driven artificial heart ventricle
Recent reports show that heart failure (HF) will afflict ∼90 million people worldwide. 44 For the development of intracardiac devices in industry, in vivo animal heart models are commonly used to test mechanical performance of the devices. However, they suffer from experimental complexity and cost.45–49 There is an unmet clinical need for an artificial heart that can support HF patients or can be used as a reliable platform for testing medical devices, training, and procedure demonstration. To demonstrate the capability of our Bio-SHARPE, we fabricated a new soft artificial pump or a soft artificial heart ventricle (SAHV) that mimics the function of the human heart ventricle (Fig. 11). The main idea is to combine the two SAHVs to form a total artificial heart.
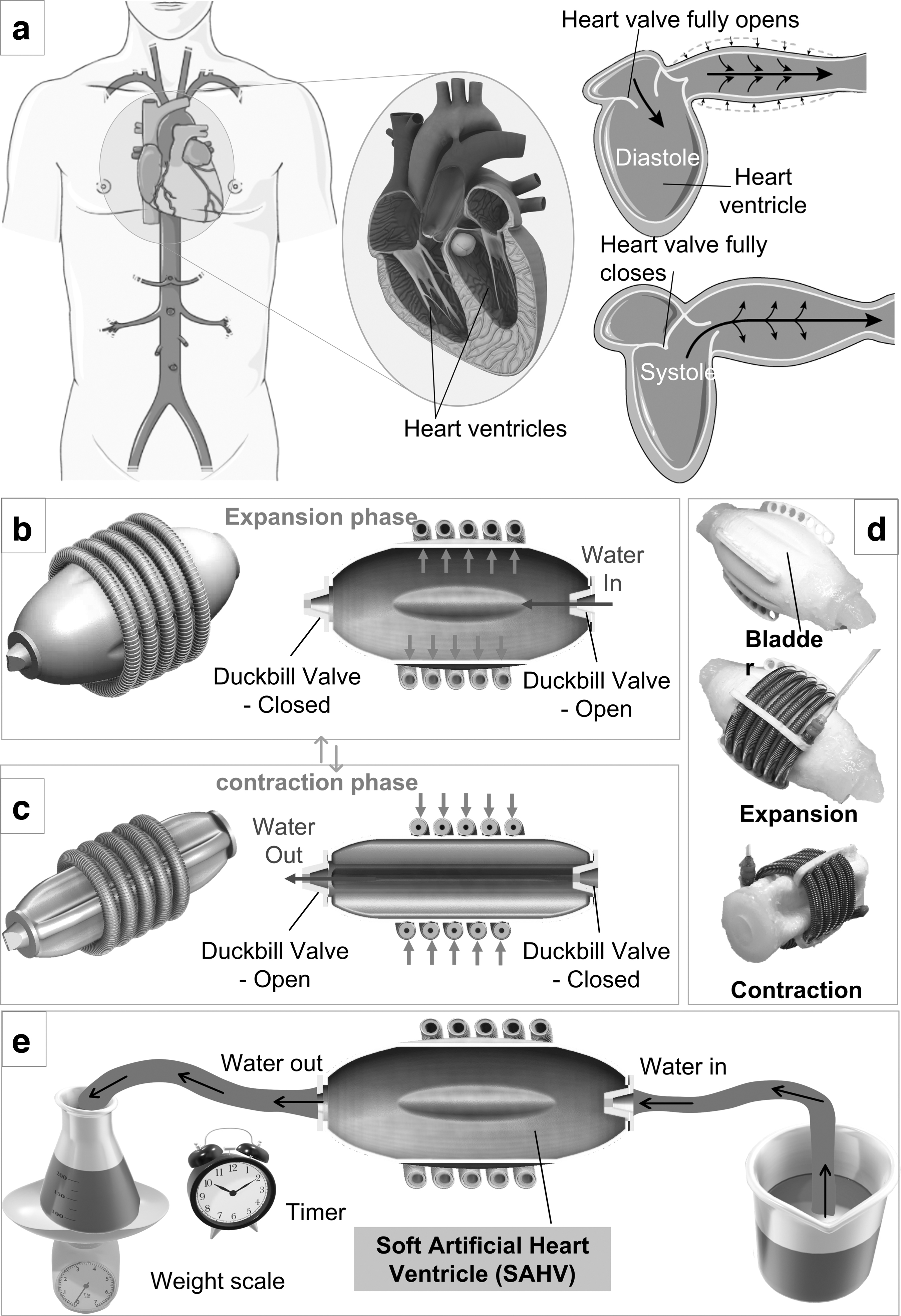
The SAHV, which will be potentially used to create a total artificial heart.
As a proof-of-concept, this article will focus only on the development of a single SAHV. The integration of two SAHV to form the artificial heart will be carried out in the future. The SAHV consists of a 3D printed TPU bladder, which was made using the same methods as the soft robotic squid, except with another duckbill valve aperture instead of a jet nozzle. In this new structure, the two on-way valves located at each end of the bladder are oriented in the same direction to create a unidirectional flow via contraction and expansion phases. As a contraction begins, the rear valve closes due to the increase in the hydraulic pressure and the front valve opens, pumping fluid out. Upon expansion, the front valve closes due to the vacuum created in the bladder and the rear vacuum opens, drawing fluid into the bladder ready for the next contraction.
Method to measure the SAHV stroke volume (SV) is shown in the Supplementary Data. The measured input volume applied to the soft pumping element was 0.94 mL and the maximum flow rate calculated was 174 mL/min with a SV of 8.66 mL which is an amplification volume ratio of 9.2 times. Assuming that the average heart's end-diastolic volume (EDV) is 89 mL, and its average SV is 57 mL, 50 the ratio of SV/EDV, also known as the ejection fraction is ∼0.64. The initial internal volume of water in the bladder of the SAHV after its expansion was around 15.0 mL, which can be considered as the equivalent EDV of the SAHV. The calculated ejection fraction of the SAHV was 8.66/15.0–0.58.
Although the SAHV used in this experiment has a small size compared to the real heart ventricle, it is noted that the two ratio values are quite close (0.58 vs. 0.64) and with the variability in “normal” heart function, the SAHV's SV to its initial internal volume ratio falls within the bounds of possible heart function. The observed 9.2 times amplification of input volume to SV means that a scaled version of this SAHV could provide the 57 mL SV of an average heart with about a 5.7 mL fluid reservoir. It should also be mentioned that the SAHV was actuated by a five-turn muscle coil, which has been observed to generate pressures of around 40 kPa in previous experiments, which is around 2.5 times higher than that of the peak pressure of the normal heart (120 mmHg or 16 kPa), 51
However, this analysis does not intend to propose a finalized design of an artificial heart ventricle, but rather, to demonstrate the potential capability of the Bio-SHARPE for the future development of a total artificial heart and to encourage further investigation into the possibility of the soft pump's suitability for artificial organs. Regardless of future applications, the results of these experiments have shown that the SAHV can be implemented into a unidirectional pumping system and that the materials and parameters of this pump, which were chosen arbitrarily, can be altered to tailor its performance to requirements.
Discussion
In this work, a new Bio-SHARPE capable of amplifying its actuation fluid volume to produce a larger output volume has been presented and characterized. The experimental results of the soft pumping elements, their associated components, and analytical models demonstrate the usefulness and reliability of the proposed methods. The SSC that forms the basic novel soft pumping element was characterized to examine its generated pressure and volume amplification capabilities as well as to assess its controllability. The amplification ratio observed in the results was at least 8.6 times, meaning for every change of 1 mL of input volume, a change of 8.6 mL would be ejected from the elastic mantle cavity. The generated pressure could achieve up to 40 kPa.
The soft pumping element itself can be tuned to fit specifications of volumetric change and pressure by changing its physical parameters such as the spring constant of the constrained outer coil, the Young's modulus of the inner tube from the soft hydraulic muscle, and the number of turns used to obtain the SSC. The characterization was undertaken using a five-turn soft pumping element and a plastic bag as the output chamber. The input pressure versus output pressure characterization produced more hysteresis than the volume versus volume characterization. This was explained by the fact that there was incomplete removal of the air bubbles inside the soft hydraulic muscle and the elastic deformation of the inner rubber tube. We also plotted input pressure versus compression force of the soft pumping element applied to a rigid cylinder.
Results from Figure 8f revealed that there was a highly linear relationship between output and input pressure with very little hysteresis. The pressure characteristics of this pumping element can be fine-tuned to achieve a more linear curve by completely removing the air bubbles within the soft hydraulic muscle and the mantle cavity. The use of an additional number of coil turns or increasing the spring constant and the elastic modulus of the rubber tube could assist to reduce the hysteresis nonlinearity. This experiment also hinges on the assumption that the elastic mantle cavity was inextensible where all energy from the constricting SSC would be directly translated into the output pressure. However, slight stretching of the bag due to high pressures could contribute to the hysteresis profile.
Another source of error could have been introduced by the fact that the elastic mantle cavity was not fully fixed to the inner surface of the SSC, allowing for relative movement between the two. This might help to explain the slight drift in results from cycle to cycle, which manifests itself as a thickened line. Addressing these concerns would help to support the validity of the results. The results of the compression force experiment and the volume experiment did reveal an unexpected or previously undocumented dead-zone behavior for fluid-driven SAMs. It was discovered that at high enough elongations and low enough muscle pressures, the inner rubber tube's outer diameter would decrease below that of the inner diameter of the constrained helical spring, which would result in a loss of contact.
This loss caused the force generation of the muscle to plateau irrespective of changes in muscle pressure. This phenomenon was observed in both experiments where elongation was held constant and pressure changes were decreased and when pressure changes were constant and elongation was increased. Therefore, more investigation into this phenomenon needs to be undertaken in future work. The developed analytical models to estimate the output volume given by Eqs. (S1) to (S11) in Supplementary Data have been experimentally validated.
Although we performed the characterization of the soft pumping element, there are some characteristics that could not be investigated experimentally. Some such characteristics were the effect of reducing or increasing the number of coil turns used in the soft pumping element, the diameter of the SSC, and different sizes of the soft hydraulic muscle on its pressure generation and amplification capabilities. We did, however, use our developed modeling to predict the effects of changing geometric and material parameters on the volume and pressure consumption and generation. Further investigation would be a worthwhile endeavor to better understand the muscle coil's behavior. For example, an optimization of output volume and generated pressure could be achieved if a simulation-based technique was used (via Abaqus or COMSOL). However, it is out of the scope of this article. Further investigation into the effects of mantle material and morphology should also be carried out in future work.
In addition, although we measured the frequency response of a single hydraulic muscle up to 20 Hz, we have not conducted experiments for higher frequency responses due to the limitation of our mechanical testing system. This was based on the fact that the required operating bandwidth for the soft robotic squid and the artificial heart ventricle was low and therefore the threshold of 20 Hz was sufficient for these applications. However, investigation of the upper limit for the higher frequency responses for the Bio-SHARPE and its associated elements should be carried out in future work.
It is also worth highlighting that the current Bio-SHARPE does not possess any sensors to monitor its elongation state, which can prevent precise motion control to achieve desired output. We therefore suggest that further work should integrate on-board sensing elements such as the use of liquid metal52–55 as the driving fluid element applied to the inner channel of the soft hydraulic muscle where we can monitor the change of resistance, which can then be converted to muscle strain. We also observed that the used soft hydraulic muscles still exhibit a nonlinear hysteresis profile between the input (pressure, volume) and the output (volume, pressure, force). To achieve precision control of the motion or force for several applications such as the soft artificial heart, a hysteresis model-based feedforward or nonlinear adaptive controller with real-time position feedback56–60 should be integrated.
We also used the novel soft pump element to develop two soft robotic applications, including a soft robotic squid powered through water jet actuation and a SAHV. Soft duckbill valves have been successfully designed and fabricated. These one-way soft valves were then integrated in the developed soft robotic bodies. Experimental results show that the soft robotic squid could travel a distance around 1.3 times its body length (55 mm) in 1 s from just one contraction. However, there are also many conceivable design additions that could be made to improve the capabilities of the soft robotic squid.
For example, a simple swim bladder could be integrated into the squid body in the form of an elastic bladder such as a balloon. This bladder would be filled with air via a transmission tube which would inflate/deflate the bladder to control the depth of the squid in its liquid environment. Stabilization elements such as fins on its body or flexible tentacles trailing behind the jet nozzle could be added to improve its trajectory upon contraction. In addition, a steering system could be added in the form of linear muscle actuated fins or even muscle actuated jet nozzle directing. This method of directing the jet nozzle would require a flexible nozzle body lined with three equally spaced muscles fixed to the nozzle body, similar to the work done by Zhang et al. 42
Contraction of either muscle would bend the nozzle in the direction of the muscle, and when the three muscles work together, they would be able to bend the nozzle in any direction. In any case, these results prove that the novel pumping element can in fact be implemented into the actuation method of a soft robotic system. Industry examples of squid-inspired vehicles similar in design to the one presented here can achieve speeds between 0.15 and 0.8 body lengths per second.61,62 Even squid-like robots powered by explosive energy can only achieve 2.25 body lengths per second, 63 only fractionally more than recorded speeds of real squids (2 body lengths per second 64 ).
We also developed a one-way soft pump inspired by the design of the human heart's ventricles. This soft pump was observed to produce a 174 mL/min flow rate and an 8.66 mL SV from a change in input volume of 0.94 mL, which is an amplification ratio in hydraulic volume of 9.2 times. Compared to the average heart's 57 mL SV and resting flow rate of 5 L/min, the new soft pump has a higher efficiency in terms of SV to flow rate ratio. This same five-turn muscle coil used in the pump was observed to generate a peak pressure of 40 kPa, which is just shy of three times higher than the heart's 15.7 kPa peak pressure. Naturally, scaling the new pump up to the scale of the heart would decrease the pressure generation of the pump in its current form, but its component specifications can be altered to mitigate such losses.
The superficial evidence presented in this article warrant future investigation on the integration of this novel pumping element into health care applications such as artificial hearts and urinary bladders. Despite advances, our current soft robots have not integrated any untethered actuation source to drive the soft pumping element. However, the use of small fluid volume (8 mL) to operate enables a promising approach toward miniature driving sources that can be directly integrated into the soft robotic bodies.
Conclusion
We developed bioinspired soft and high aspect ratio pumps that can be used in robotic and medical applications. Our soft pumping element could amplify a high input hydraulic volume to at least 8.6 times to achieve 40 kPa output pressure. The soft pumping elements have been successfully integrated into elastic mantle cavity to form a bioinspired soft robotic squid and SAHV. The initial evidence presented in this article warrant future investigation on the integration of the novel pumping element into health care robotic applications such as artificial hearts, colon, stomach, and urinary bladders. We believe that our Bio-SHARPE and its potential application areas will expand knowledge and significantly benefit the robotic community.
Footnotes
Authors' Contributions
All the authors earn their authorship by contributing their work to construct the study.
Author Disclosure Statement
All the authors have no conflict of interests.
Funding Information
The authors acknowledge support from the UNSW Start-Up Grant (PS58173), the UNSW Scientia Fellowship Grant (PS46197), and the Vanguard Grant from National Heart Foundation of Australia (RG204224).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.