
Abstract
Crawling animals with bendable soft bodies use the friction anisotropy of their asymmetric body structures to traverse various substrates efficiently. Although the effect of friction anisotropy has been investigated and applied to robot locomotion, the dynamic interactions between soft body bending at different frequencies (low and high), soft asymmetric surface structures at various aspect ratios (low, medium, and high), and different substrates (rough and smooth) have not been studied comprehensively. To address this lack, we developed a simple soft robot model with a bioinspired asymmetric structure (sawtooth) facing the ground. The robot uses only a single source of pressure for its pneumatic actuation. The frequency, teeth aspect ratio, and substrate parameters and the corresponding dynamic interactions were systematically investigated and analyzed. The study findings indicate that the anterior and posterior parts of the structure deform differently during the interaction, generating different frictional forces. In addition, these parts switched their roles dynamically from push to pull and vice versa in various states, resulting in the robot's emergent locomotion. Finally, autonomous adaptive crawling behavior of the robot was demonstrated using sensor-driven neural control with a miniature laser sensor installed in the anterior part of the robot. The robot successfully adapted its actuation frequency to reduce body bending and crawl through a narrow space, such as a tunnel. The study serves as a stepping stone for developing simple soft crawling robots capable of navigating cluttered and confined spaces autonomously.
Introduction
In nature, crawling animals utilize the dynamic interactions between their bendable soft bodies and surfaces to traverse various substrates. To achieve energy-efficient locomotion, they exploit the friction anisotropy of their asymmetrically structured skins. Biologists have investigated and discovered friction anisotropy on various biological surfaces, such as adhesive setae in reptiles, 1 arachnids, 2 and insects, 3 and the scale-like arrangement and micro-ornamentation of snake skins.4,5 Several attempts have been made to mimic the anisotropic friction properties of biological surfaces in artificial systems, including snake-inspired scales,6,7 gecko-inspired adhesive pads,8,9 and shark and plant-inspired asymmetrically structured surfaces.10,11 Although studies have focused on the effect of asymmetric structures on the friction properties in different profile orientations, only specific surface–substrate combinations have been investigated. However, the biomechanics of the bodies of animals significantly impact friction during motion. Owing to the softness, living beings can expand their body and dynamically transfer weight from one body part to another. Several researchers have used these properties to develop soft robots 12 that utilize soft materials, expandable bodies, and the anisotropic friction principle with a reduced number of actuators to avoid the coordination control problem of multiactuators. For instance, researchers combined high and low friction materials using a three-dimensional printer, 13 designed structures based on plastic materials that can be transformed, such as kirigami, 14 or introduced alterable angle scales. 15 Although most studies implement asymmetric structures with serpentine movements (as found in snakes), asymmetric structures with bendable movements (as those of an inchworm), as well as the effect of soft body bending, asymmetric surface structures, and substrate on soft robot behavior, have not been comprehensively studied.
Previously, we systematically investigated the anisotropic friction properties of a bioinspired sawtooth surface structure. 16 We varied sample/substrate stiffness ratios, sawtooth profiles with different aspect ratios, and used a simple peeling test setup. Our investigation of the bioinspired sawtooth-surface structure verified that the anisotropic friction properties are controlled by the aspect ratio of the asymmetric sawtooth profiles and substrate roughness. Based on previous studies, we here aim to apply the anisotropic friction properties to a soft crawling robot and analyze the dynamic interactions between the robot and substrate caused by soft robot body and surface structure bending. We developed a soft robot using a silicone elastomer and added an asymmetric surface structure at the abdomen of the robot. To demonstrate the effect of different asymmetric surface structures on friction properties during soft body bending, we considered seven types of tooth models, flat and rough substrates, and two body bending frequencies. These factors all impact the dynamic mechanical behavior of the robot. A benefit of using anisotropic friction for locomotion includes the potential of reducing energy consumption and the number of actuators needed. In this study, we demonstrate this potential by showing that soft robot locomotion can be realized with only a single source of pressure for pneumatic actuation, unlike multiple actuators generally required by existing soft robot systems.17,18 In addition, we implemented a control scheme, inspired by biological locomotion control systems, 19 with short-term memory. We developed this sensor-driven neural control for locomotion generation and adaptation. Owing to this control method, the soft robot can adapt its gait for efficient locomotion in a confined space, as depicted in Figure 1. To summarize, this study contributes to the current state of the art in terms of the following aspects:

Soft robot crawls on a rough substrate and adapts its movements to crawl in a narrow space or tunnel.
Investigation of dynamic interactions between asymmetric structure, soft body bending, substrate, and force directions that occur from the interactions.
Demonstration of emergent soft robot locomotion that exploits the dynamic asymmetric structure, soft body bending, and substrate interactions. In this approach, robot locomotion was achieved using a minimal actuator driven by neural control, which enabled the robot to crawl on different flat (glass/acrylic) and rough (sandpaper P60 with an average height of 64 μm) substrates.
Implementation of an exteroceptive sensor and neural sensory preprocessing with embedded short-term memory for robot behavioral adaptation to crawl through a narrow space.
Materials and Methods
Crawling principle of the soft robot
In this experimental study, we demonstrate the crawling principle of our soft robot with an asymmetric abdominal surface structure driven by a single actuator. Details on sample and substrate preparation can be found in Supplementary Data. In the following, we provide an overview of how our robot can crawl by macrodeformation, as there are various strategies for soft robot locomotion (e.g., body bending,20–23 body elongation, 24 their combination, 25 and body and leg bending, 26 see Supplementary Table S2), while the greater detail of microdeformation (abdominal surface structure [teeth/denticles] bending), as well as a step-by-step visualization of the robot movement, is described in the Results and Discussion section later. Figure 2 illustrates the locomotion strategy of our robot, which combines body bending and elongation (i.e., two working states of macrodeformation). Initially, air flows into the robot, which causes the robot to bend (body bending) approximately in the middle of the body. As the anterior part has higher friction than the posterior part due to different angles between the denticles and substrate in the anterior and posterior parts, this causes the anterior part to stick to the ground, whereas the posterior part moves inward in the direction of motion. Subsequently, the air is expunged from the robot, due to passive elastic contraction of the silicone material, which causes the robot to loosen or elongate its body as the anterior part has lower friction than the posterior part. This results in the posterior part sticking to the ground, while the anterior part moves in the direction of motion (body elongation). Under the locomotion strategy, friction mechanisms 27 between the soft robot abdomen with an asymmetric surface structure (soft material) and hard substrate (hard material) are complex 3 since they involve mechanical interlocking and contact area-mediated friction (adhesion-mediated friction). 3 The first one depends on the roughness of the substrate and interlocking between the tips of the robot denticles (teeth) and substrate asperities. The second one rather depends on the formation of strong real contact between flat parts of the deformable denticles and smooth islands of the substrate. 16 Since the denticle tips are rather flexible due to the softness of the silicone material, the soft structure cannot strongly interlock with the asperities of the rough substrate, but it can build strong adhesive contact with the flat islands of substrate; therefore, the adhesion-mediated friction contribution seems to dominate.
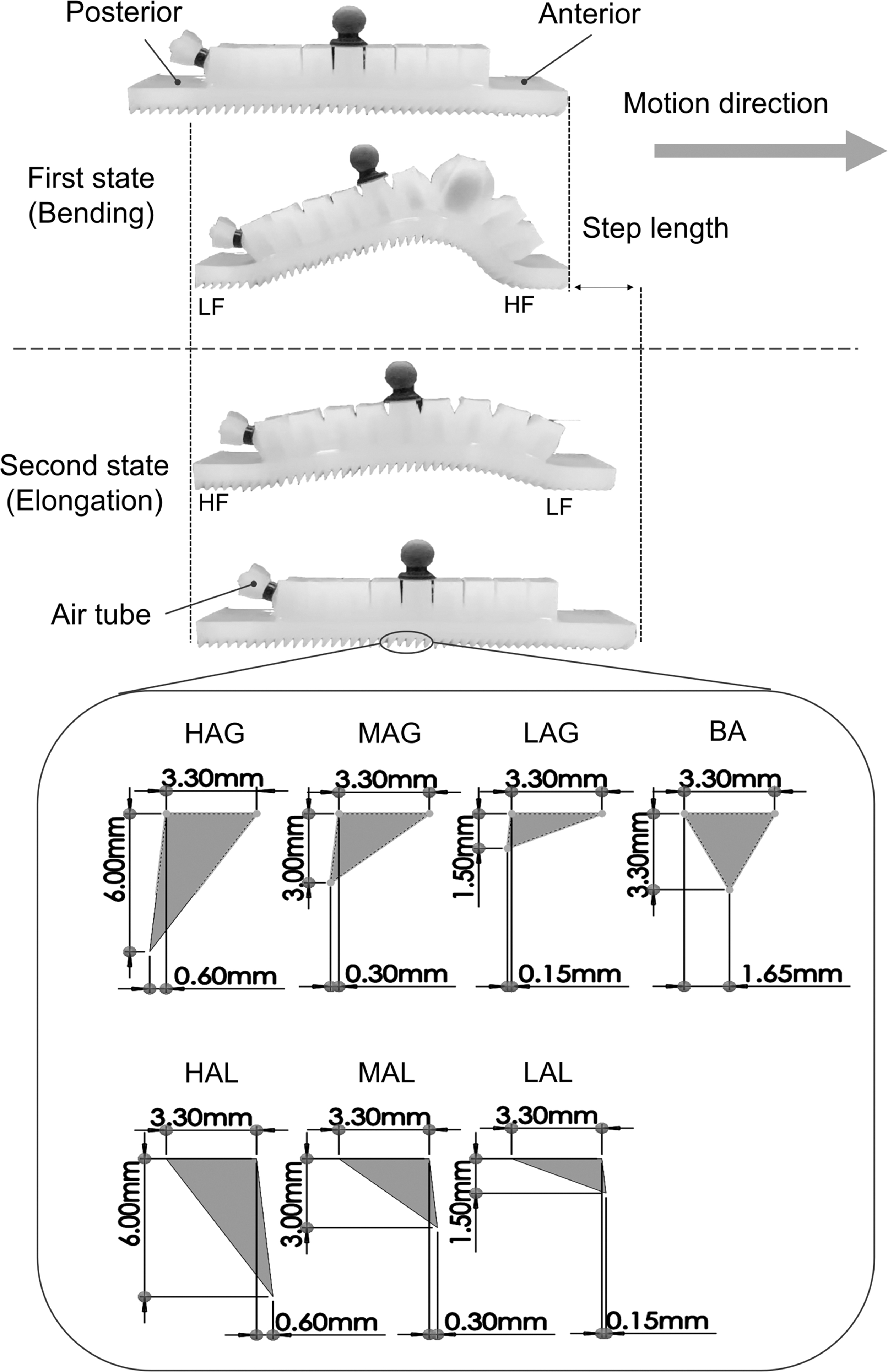
Emergent locomotion behavior resulting from the dynamic interactions of the asymmetric body surface structure (microdeformation), soft body bending (macrodeformation), and substrate (mechanical interlocking and contact area-mediated friction). Principle of the soft crawling robot movement considering the bending of one axis and dimensions of seven tooth models (HAG = against model with a high aspect ratio, MAG = against model with a medium aspect ratio, LAG = against model with a low aspect ratio, BA = balance model, HAL = along model with a high aspect ratio, MAL = along model with a medium aspect ratio, and LAL = along model with a low aspect ratio). The soft crawling movement (macrodeformation) comprises two states, namely bending and elongation, which cause linear robot motion.
Our previous study 16 showed that the aspect ratio of the asymmetric denticle structure is an important factor that defines the level of both mechanical interlocking and adhesion-mediated friction. Therefore, we used here seven different models of the robot to investigate this crawling principle, including three models with teeth pointing against the air tube with different aspect ratios (Fig. 2), referred to as the “against models,” three identical models but with the teeth pointing away from the tube, referred to as the “along models,” and one “balance” model with vertically symmetrical teeth. The three against models, named HAG, MAG, and LAG, have a high aspect ratio (HIGH), medium aspect ratio (MEDIUM), and low aspect ratio (LOW) of 1.82, 0.91, and 0.45, respectively. These aspect ratios are calculated based on the height divided by the length of the tooth structure. The three along models, named the HAL, MAL, and LAL, have the same aspect ratios as the against models. The aspect ratio of the balance model (BA) is 1. We analyzed the behaviors of seven different tooth types to explore the design space and versatility of a soft robot with a tooth-shaped skin (see the Results and Discussion section).
Soft crawling robot based on a pneumatic actuator
Based on the robot crawling principle (described in the Crawling principle of the soft robot section above), we determined that controlling the airflow into the robot is critical for generating a range of behaviors and enabling efficient travel of the robot. Thus, we developed a pneumatic control system and sensor-driven neural control. The pneumatic control system comprises electrical components that regulate the airflow into the robot based on a command generated by the sensor-driven neural control. This sensor-driven neural control is used to control the actuation frequency of the robot based on sensory feedback and embedded short-term memory to achieve adaptive robot body bending for passing the robot through a tunnel.
Pneumatic control system
Figure 3a depicts the low-level pneumatic control system used for the soft crawling robot. It comprises a power supply (DC 12 V), an air pump (5 L/min), a solenoid valve (12 V), a relay (5 V), a protoboard, a miniature laser sensor (GY-530 VL53L0X), and an Arduino board. The Arduino board was the primary processor used to generate signals to control the operating frequency of the relay using a digital output pin. The different frequencies of the output result in different body bending angles of the soft crawling robot. For instance, when the neural control was transmitted at a high frequency (2 Hz), the robot exhibited a low degree of bending (Fig. 3a). Conversely, when the frequency decreased to 0.5 Hz, the bending angle was large (Fig. 3a). A video showing the robot body bending at the low and high frequencies can be seen in Supplementary Movie S1 or http://www.manoonpong.com/SCR/SupplementaryVideo.mp4 The laser sensor was installed at the anterior part of the soft crawling robot at an angle of 45° to the horizontal surface to sense an obstacle. We received raw data from the laser sensor using an analog input pin of the Arduino board. The laser sensor signal can detect an obstacle in a range of up to 2 m away. In this study, we used it in a range between 300 and 0 mm where we normalized the sensor signal to a range of [0, 1] before sending it to sensory preprocessing. The value 0.0 means that no obstacle is detected (i.e., the distance between the robot and obstacle is equal or greater than 300 mm), and the value 1.0 means that a very near obstacle is detected (i.e., no distance between the robot and obstacle). The other values between 0.0 and 1.0 mean that the obstacle is a range between 300 and 0 mm, the closer the obstacle, the higher the sensor signal (Supplementary Fig. S2).

Soft crawling robot with a pneumatic actuator controlled by sensor-driven neural control.
Sensor-driven neural control
The sensor-driven neural control generates a solenoid command to drive the robot through three submodules, namely sensory preprocessing, central pattern generator (CPG)-based neural control, and CPG postprocessing. Sensory preprocessing is used to prolong the temporal response and filter the noise from the laser sensor signal. The CPG-based neural control generates rhythmic signals, and CPG postprocessing converts the CPG signal into a signal that can operate the solenoid. With this simple control strategy, the neural control acts as a closed-loop system to drive and adapt the robot locomotion (Fig. 3b). The approach of sensory preprocessing and CPG-based neural control utilizes the neurodynamics of recurrent neural networks. The standard additive neuron model with time-discrete dynamics was developed using Equation (1).

where n denotes the number of neurons, ai indicates their activities, Bi represents a constant internal bias term, and Wi j denotes the synaptic strength of the connection from neurons j to i. The output of each neuron in the sensory preprocessing unit was calculated using standard sigmoid transfer function,
Sensory preprocessing
Sensory preprocessing includes several groups of recurrent neurons that are used to reduce noise and prolong the duration of signal activity. 31 Each group comprises two single recurrent neurons, HNp1,2, with a sigmoid transfer function and one output neuron, ONp, with a hyperbolic tangent transfer function that combines each neuron (Fig. 3b). We used 500 groups of recurrent neurons in this study; the number of neurons can be set to define the prolongation of the sensory signal. To generate a short-term memory for the signal prolongation using groups of recurrent neurons,29,30 we configured the network based on the hysteresis effect of a recurrent neuron. The network parameters were set to constant values, as follows. The signal input at HNp1 was amplified by setting the synaptic weight as a positive value, 4.3. To shift the hysteresis, the neuron HNp1 was set to a negative bias term, −5.5. In addition, we introduced a self-connection term for neuron HNp1 as 7.5. This term affects the width of the hysteresis loop. The hysteresis shows the activation period between high (≈1.0) and low (≈0.0) at different points (Fig. 3c, d). We set the network parameters of the neuron HNp2 to perform a hysteresis loop larger than the neuron HNp1 which will extend the duration of response or sensory feedback. The neuron HNp1 used this hysteresis effect to perform as a low-pass filter, which can eliminate unwanted noise introduced by the shaking of the laser sensor. The output of HNp1 (filtered signal) was transmitted to the neuron HNp2, which has the same structure as HNp1 with different parameter values. Therefore, the weights of the connections between neurons, bias term, and self connect were empirically set to 3.0, −5.15, and 8.0, respectively. Finally, the output signals from the neurons HNp1 and HNp2 were amplified and combined through the weights (each of which has a value of 8.0) at the output neuron ONp. The output of ONp(n) was transmitted as the input signal to the subsequent network group, HNp1(n + 1). Eventually, the final output signal of the sensory preprocessing unit was transmitted to the CPG-based neural control.
CPG-based neural control
The CPG-based neural control (Fig. 3b) can generate different periodic output signals.
32
Its CPG network comprises two recurrent neurons with full connections.
33
The network can generate various periodic outputs based on the weights of the CPG network. Therefore, we applied the CPG network to control the locomotion of the soft robot and adjusted its weights to alter the locomotion behavior of the soft robot. The activity ai of each neuron Ni develops according to Equation (1). In this case, the number of neurons was two (n = 2), the modulatory input (MI) was set to 0.5 (high frequency) or 0.15 (low frequency) based on the processed laser sensor signal, Wij was determined as W12 = 0.18 + MI, W21 = −W12, and W11 and W22 were set to 1.4. This parameter setup was based on our previous study.
33
The output of neuron oi was computed using a hyperbolic tangent transfer function,
CPG postprocessing
CPG postprocessing was used to convert the periodic CPG signal to the solenoid valve command. We computed the signal using a Heaviside step transfer function,
Results and Discussion
Dynamic interactions of asymmetric structure, body bending, and substrate
To understand the emergent crawling behavior, we performed a visual inspection by recording the movement of the robot using a camera, as depicted in Figure 4a. The images illustrate the robot behavior of the HAG model when the robot moves on a rough substrate at a low frequency. The HAG model can propel the robot to crawl forward and exhibits the best performance on a rough substrate (Fig. 4c). Conversely, the LAG model with a high frequency exhibits the best forward crawling performance on the flat substrate (Fig. 4b). Interestingly, we observed backward crawling on the flat and rough substrates for the three models (LAL, MAL, HAL, Fig. 4b, c).

The dynamic body movement of the robot (macrodeformation) driven by pressure generates a force that causes the microdeformation of teeth. A positive force pulls (pushes) the anterior (posterior) part of the robot forward. Conversely, a negative force pushes/pulls these parts of the robot backward. The following is a detailed description of the sequential steps of the dynamic robot movement, with a step-by-step visualization of each movement depicted in Figure 4a. We identified sequential steps and time (T) of the movement as follows.
First (T = 0 s), the robot begins in its deflated resting state without any force being exerted. In the resting state, the teeth do not deform (number 1 in Fig. 4a). Second (T = 0.25 s), the robot begins to elongate when pressure is applied (body elongation state 24 ); the teeth push out with positive and negative forces at the anterior and posterior parts of the robot, respectively (number 2 in Fig. 4a). Due to the asymmetric sawtooth structure and profile arrangement of the model, the anterior part deforms along the positive force, whereas the posterior part deforms against the negative force. The adhesion-mediated friction (one type of friction mechanism from the interaction between the soft robotic structure and hard substrate3,16) mainly contributes to the anterior deformation, while the mechanical interlocking contribution dominates for the posterior deformation (another type of friction mechanism from the interactions between denticle tips of the robotic structure and substrate asperities). Third (T = 0.5 s), the robot begins to contract/bend, with the posterior part contracting more rapidly than the anterior part (body bending state), generating a positive force at both ends of the robot (number 3 in Fig. 4a). In this situation, both anterior and posterior deformations are primarily influenced by the adhesion-mediated friction. In addition, considering the posterior part of the second and third steps, rapid stretching and contraction of the body result in rapid elastic movement in the teeth that generates the force to push the robot forward. Subsequently at T = 0.75 s, both parts of the robot bend (intermediate body bending state), generating negative and positive forces at the anterior and posterior parts of the robot that pull the robot's teeth toward the middle (number 4 in Fig. 4a). According to the forces at T = 0.75 s, the anterior part deforms due to mechanical interlocking, while the posterior part deforms due to the adhesion-mediated friction. When maximum contraction (maximum body bending state) is reached at T = 1 s, before the release of air is initiated, the highest negative and positive forces are observed at the anterior and posterior parts of the robot, respectively. At the anterior part, the soft teeth highly deform in the opposite direction to their profile (against the negative force) and strongly interlock with asperities of the substrate (mechanical interlocking) resulting in a strong grip between the teeth and substrate (number 5 in Fig. 4a). Even when the robot begins to release air at T = 1.25 s, pulling forces will remain (number 6 in Fig. 4a). The forces are similar to those observed in number 4 (Fig. 4a). Afterward at T = 1.5 s, the pulling forces are no longer exerted, and the robot pushes the teeth out in two directions (body elongation), generating positive and negative forces at the anterior and posterior parts of the robot, respectively (number 7 in Fig. 4a). At T = 1.75 s, the robot continues to elongate the body and pushes with the maximum amount of force, generating the highest positive and negative forces at the anterior and posterior parts of the robot, respectively (number 8 in Fig. 4a). As the robot approaches its resting state at T = 1.9 s, a force reduction is observed in both ends (number 9 in Fig. 4a). In the subsequent states (numbers 7–9), the adhesion-mediated friction and mechanical interlocking contributions for anterior and posterior microdeformations are similar to the state depicted as number 2. Finally, at T = 2 s, the robot returns to its initial shape (resting state), devoid of any force effects (number 10 in Fig. 4a).
At a high frequency, the dynamic movement of the robot follows a shorter sequence with 5 observable steps instead of 10. Initially (T = 0 s), the robot is in its resting state, free of any force effects (number 1 in Appendix Fig. A1). When the robot begins to elongate at T = 0.1–0.2 s (numbers 2 and 3 in Appendix Fig. A1, elongation state), positive and negative forces are generated at the anterior and posterior parts of the robot, respectively. Before releasing the air from the robot at T = 0.3 s (number 4 in Appendix Fig. A1), positive force is generated at both the anterior and posterior parts during the maximum body bending of the robot. Finally, at T = 0.4 s, the robot returns to its original shape (resting state, number 5 in Appendix Fig. A1). The adhesion-mediated friction and mechanical interlocking contributions for anterior and posterior tooth bending during dynamic robot and substrate interactions are comparable to those observed in the low frequency but overall macro- and microdeformations here are lesser expressed.
According to the results and analysis, the emergent robot crawling behavior under dynamic soft robot and substrate interactions is realized by macrodeformation (body bending and elongation*) driven by pressure, microdeformation (tooth bending) generated by positive and negative frictional forces, and friction mechanisms derived from mechanical interlocking and adhesion-mediated friction. In addition to these factors, different crawling frequencies lead to different time spans in each state. At the low frequency (Fig. 4a), the robot exhibits three observable states: first body elongation (0.25 s), then body bending (1 s), and finally second body elongation (0.5 s). The total body elongation period (0.75 s) is less than the body bending period (1 s). In contrast, the robot exhibits two observable states at the high frequency: body elongation (0.2 s) and then body bending (0.1 s). The total body elongation period (0.2 s) is greater than the body bending period (0.1 s). When comparing the low and high frequencies (Fig. 4a and Appendix Fig. A1), it can be seen that the teeth deform more at the low frequency. The low frequency anterior teeth also display rapid bending direction change (see numbers 3 and 4 in Fig. 4a), which is not seen at the high frequency. This demonstrates that the frequency at which the robot is driven influences the deformation of teeth. The teeth of the LAG and MAG models are not as easily distinguishable as the HAG model in video recordings but appear to exhibit a similar pattern.
To determine and compare the locomotion performance of the different models, we conducted a series of further experiments. Initially, we measured the performance considering the travel distance of the seven robots on flat and rough substrates at a high frequency for 5 min; we used two types of robots with different tooth directions, along and against, as illustrated in Figure 4b. Within the two groups, the models with the shortest teeth, LAL and LAG, were the ones that travelled the furthest on a flat substrate with distances of −110 mm (backward) and 70 mm (forward), respectively. In contrast, the robots with the longest teeth, HAL and HAG, travelled the furthest on a rough substrate, approximately ∼−90 mm (backward) and 20 mm (forward), respectively. All in all, the performance trends were as follows. The LOW models (LAL and LAG) performed the best when the robot moved on a flat substrate, followed by the MEDIUM (MAL and MAG) and HIGH models (HAL and HAG). Conversely, the HIGH models (HAL and HAG) performed the best on a rough substrate, followed by the MEDIUM models (MAL and MAG) and LOW models (LAL and LAG). Furthermore, we repeated the same experiments with a low frequency (Fig. 4c). We observed that all three along models (LAL, MAL, and HAL) moved only slightly. The robot with the HAG model was determined to be the best at the low frequency and moved ∼60 mm (forward) on a rough substrate. The experiments also suggest that the profile orientation (AL, AG) has an impact on robot locomotion behavior (see, LAL vs. LAG, MAL vs. MAG, HAL vs. HAG in Fig. 4b). For example, at the high frequency movement, the robot crawling direction can be changed from crawling forward to backward just by reversing the profile orientation from the AG to AL and vice versa. Since we are interested in forward locomotion here, which will be used for our demonstration of navigating through a tunnel with body bending adaptation, we also examined the energy efficiency of the robots with the models that generated significant forward locomotion (i.e., LAG, MAG, and HAG models). Energy efficiency is indicated by the cost of transport (Supplementary Data).22,35 As tooth microbending behavior (microdeformation) influences locomotion performance, we used finite element analysis to further investigate the microbending behavior of all models (LAG, MAG, HAG, LAL, MAL, HAL, BA) under positive and negative forces. We also compared the bending behavior of the models to two standard symmetric structures (half-circle and square) to highlight the advantage of the asymmetric structure. The results and analysis are shown in Supplementary Data.
Based on the crawling principle and dynamic interactions, the friction force between the abdomen and substrate is an essential factor that makes the robot crawl forward (positive direction). Therefore, we hypothesized that static friction can explain the locomotion performance of our soft crawling robots. This implies that the tooth models with a high difference in the friction coefficient between the two directions can perform with higher performance than other models (i.e., more energy-efficient locomotion). From this point of view, we measured the static friction coefficients for the tooth models in both directions. The results and analysis can be seen at Supplementary Data.
Soft robot locomotion and adaptation
To demonstrate the potential of a soft crawling robot that uses friction anisotropic locomotion, we conducted an experiment using the HAG model on rough terrain as this robot model moved the best at both frequencies on this terrain (Fig. 4b, c). The robot was operated using a sensor-driven neural control, which comprises a neural oscillator that serves as a CPG 19 and postprocessing and neural sensory preprocessing with embedded short-term memory. In the experiment, the robot began moving at a low frequency, resulting in high bending, as this is the frequency that results in the most efficient locomotion (Fig. 4c). Subsequently, when the robot encountered an impassable tunnel, the neural control switched to a high frequency to reduce the bending of the robot so that it was able to pass through the tunnel. Having passed the tunnel, the robot resumed moving at its original low frequency (Fig. 5).

Experiment performed to verify the automatic adaptation of locomotion frequency by passing the robot through a tunnel.
A miniature laser sensor was used to detect the tunnel. The raw sensor signal was preprocessed to extend the time response and filter noise to facilitate successful maneuvering of the tunnel at a high frequency and subsequent return to the original low frequency. The short-term memory, realized by neural preprocessing, was implemented to prolong the sensory signal when the front part of the robot had passed through the tunnel and the laser did not detect an obstacle, to delay switching back to the original frequency. The CPG-based neural control received the preprocessed sensory signal and generated an appropriate periodic signal. The CPG signal was then postprocessed at the CPG postprocessing unit. The final output from the postprocessing unit was used to directly control the solenoid valve by turning it on and off to release the pressure and drive the robot (Fig. 5b). The experimental results show that the robot automatically adapted its motion when it detected an obstacle and adjusted itself to pass through the space below the obstacle. We also encourage readers to see a video showing the locomotion of the soft crawling robot with the miniature laser sensor and sensor-driven neural control in Supplementary Movie S1 or http://www.manoonpong.com/SCR/SupplementaryVideo.mp4
In comparison to related state-of-art soft robots22–26 (Supplementary Table S2), the existing robots can only move on either flat or rough terrain while our soft robot with the bioinspired asymmetrically structured surface (sawtooth) can move on both flat and rough terrains. In addition, due to the asymmetric structure, our robot can perform locomotion driven by a single actuator. Furthermore, the robot can detect a tunnel/obstacle using a laser sensor (placed in the anterior part of the robot body) and automatically adapt its crawling behavior to pass through in a tunnel with a long length of up to 133% of robot body length. The tunnel has a small crawling gap of about 147% of robot body thickness. In contrast, the other works22–25 did not demonstrate robot locomotion in a confined space except Shepherd et al 26 demonstrating that their robot could move underneath an obstacle (an acrylic plate with a large gap of about 317% of robot body thickness above the ground). The acrylic plate had a short length of about 4% of robot body length. Finally, our robot uses sensor-driven (closed-loop) neural control with short-term memory for locomotion and stable behavioral adaptation, while the other robots22–26 used open loop (manual) control. Overall, our study shows not only new features of the robot but also contributes characterization of soft frictional surfaces, which provides a solid scientific background for their further applications in various other kinds of walking and climbing robots. 12
Conclusions
Typically, soft crawling robots require multiple actuators36–40 or intricate mechanical designs that use multiple materials 14 to generate friction for their movement (Supplementary Table S2). Multiple actuators complicate the process of controlling the robot and increase the cost of building the system. To reduce the number of actuators and simplify the control of the robot, we applied an asymmetric sawtooth structure to a soft robot for locomotion using only one air tube connected to an actuator. With different teeth designs and ratios, we can obtain multiple crawling directions on flat and rough substrates. Furthermore, we demonstrated the crawling principle of the soft robot with an asymmetric surface structure and analyzed the dynamic interactions between the asymmetric structure, soft body bending, and substrate that affect the locomotion efficiency of the robot. The findings of the study show that rapid stretching and contraction of the body create rapid elastic movement in the teeth, which is an important factor in the soft crawling robot's movement. Based on the experimental results, we recommend using a soft crawling robot with the LAG model at a high frequency and the HAG model at a low frequency to facilitate the forward movement of the robot on flat and rough substrates, respectively. In addition, the results verify that the generated static friction coefficient affects the performance of the robot significantly. Surprisingly, a robot with a low difference in friction coefficient can move better than other robots on both flat and rough substrates (see the static friction coefficient test in Supplementary Data). Finally, we used sensor-driven neural control to make the robot adapt its body bending and speed to pass through a tunnel. Therefore, unlike existing studies, we demonstrated the prospect of a simple soft crawling robot with sensor-driven body adaptation.
Overall, our study represents the fundamental steps in soft robotics, using a soft material, asymmetric structure, and neural control, which are necessary for efficient soft robotic movement in various environments. We performed empirical investigations of the dynamic interactions to understand the behavior of soft crawling robots equipped with sawtooth surface structures. We also analyzed the tooth microbending behavior of all models (LAG, MAG, HAG, LAL, MAL, HAL, BA) when positive and negative forces are applied and compared the bending behavior of the models to two standard symmetric structures (half-circle and square). In comparison to the other models, the HIGH models (HAL, HAG) exhibit the greatest tooth displacement. This results in the greatest restoring force which can generate rapid elastic tooth movement for locomotion enhancement (as observed in locomotion on a rough substrate). In the future, we will explore mathematical models that can explain the behavior of soft crawling robots in detail and improve their control models for robot–robot interaction and collaboration. We will also explore and apply neural learning methods41–44 to the neural control framework for automatic neural parameter tuning and online adaptation to deal with an unknown environment and an unexpected robot morphological change.
Footnotes
Authors' Contributions
N.A., S.N.G., J.J., and P.M. worked out the conception of the study, as well as conceived and designed the experiments. N.A. developed the physical robot models and the robot control system, as well as carried out the robot experiments. P.M. provided the general direction of the study, obtained the funding, and supervised the development of the robot and neural control systems. N.A. and P.M. analyzed the robot experimental results. J.J. contributed to the development of physical robot models. F.H., A.K., and S.N.G. performed the static friction tests and analyzed the results. The article was written by N.A. and P.M. All authors edited and reviewed the article.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This research was supported by the BrainBot project (I22POM-INT010) and the IST Bio-inspired Robotics research grants (grant numbers: 300/111100/171111100005 and 300/111500/221111500203) of Vidyasirimedhi Institute of Science and Technology (VISTEC).
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.