
Abstract
Soft robots equipped with multifunctionalities have been increasingly needed for secure, adaptive, and autonomous functioning in unknown and unpredictable environments. Robotic stacking is a promising solution to increase the functional diversity of soft robots, which are required for safe human–machine interactions and adapting in unstructured environments. However, most existing multifunctional soft robots have a limited number of functions or have not fully shown the superiority of the robotic stacking method. In this study, we present a novel robotic stacking strategy, Netting–Rolling–Splicing (NRS) stacking, based on a dimensional raising method via 2D-to-3D rolling-and-splicing of netted stackable pneumatic artificial muscles to quickly and efficiently fabricate multifunctional soft robots based on the same, simple, and cost-effective elements. To demonstrate it, we developed a TriUnit robot that can crawl 0.46 ± 0.022 body length per second (BL/s) and climb 0.11 BL/s, and can carry a 3 kg payload while climbing. Also, the TriUnit can be used to achieve novel omnidirectional pipe climbing including rotating climbing, and conduct bionic swallowing-and-regurgitating, multi-degree-of-freedom manipulation based on their multimodal combinations. Apart from these, steady rolling, with a speed of 0.19 BL/s, can be achieved by using a pentagon unit. Furthermore, we applied the TriUnit pipe climbing robot in panoramic shooting and cargo transferring to demonstrate the robot's adaptability for different tasks. The NRS stacking-driven soft robot here has demonstrated the best overall performance among existing stackable soft robots, representing a new and effective way for building multifunctional and multimodal soft robots in a cost-effective and efficient way.
Introduction
Multifunction is an essential ability of robots so that they can complete tasks in different conditions and adapt in unstructured environments. Soft mobile robots, compared with their rigid counterparts, have better environmental adaptability, safer human–machine–environment interactions, and increased compliance, and are thus more suitable for multimodal locomotion and performing dexterous, delicate manipulation tasks. 1 Various engineering solutions to multifunctional soft mobile robots have been developed. For example, Hu et al. developed a magnetically driven soft mobile robot that can swim, climb, roll, walk, jump, crawl, and conduct material handling tasks, although a customized external magnetic field and specialized magnetization profiles are required. 2 Robotic stacking is an appealing solution to multifunctional robots. For instance, Robertson and Paik demonstrated a series of vacuum-driven soft modular robots that are capable of crawling, rolling, and climbing and can execute material handling and active stiffness tuning tasks. 3
Here, we categorize existing robotic stacking mechanisms into 0D, 1D, 2D, and 3D ones, as summarized in Table 1. 0D stacking relies on one connection joint to fix all actuators together with a hub-and-spoke arrangement.4–10 In 1D stacking, actuators are connected by joining ends in series11–15 or parallel. 16 In 2D stacking, actuators are connected to each other in planar structures.17–22 In 3D stacking, actuators are stacked into 3D structures such as brick piling,23,24 space frame, 25 and tensegrity 26 ones. Different stacking mechanisms can also be combined together to create robotic structures with more functions such as “1D+0D,”27,28 “2D+0D,” 29 “2D+1D.”3,30,31 However, most existing stacking strategies extended their capabilities by only increasing their stacking dimensions, which has limited the integration of some novel functions and cannot fully show the superiority of the robotic stacking method.
Summary of Common Robotic Stacking Mechanisms
Robertson and Paik also integrated crawling, climbing, rolling, and manipulation into a series of soft modular robots. 3 Here, in our study, not only the swallowing/storing/disgorging behaviors were realized, but also other locomotion forms were investigated such as mono-oscillation crawling, out-pipe/inner-pipe climbing, rotating–climbing, and swallowing–storing manipulation. Also, there is a lack of multifunctional soft robots that couple the swallowing/disgorging function, which is quite common in nature, to enhance their versatility, although there are several published studies on enveloping gripping32,33 and inner-though transporting.34–36 For example, Wang et al. showed the simulated swallowing and disgorging process using a hydraulic artificial muscle-driven manipulator for underwater applications based on three rigid linked planar linkages. 37 Zhang et al. proposed a swallowing robot actuated axially and sectionally based on Hoberman's linkages. 38 However, their limited flexibility may inhibit the adaptability and versatility of their robots.
Pneumatic artificial muscles (PAMs) have excellent compliance and large output forces and displacements with decent robustness. They have, therefore, been commonly used in various bionic robots.13,39–41 In this work, via utilizing the inherent flexibility of PAMs, we introduce the Netting–Rolling–Splicing (NRS) stacking strategy to quickly and efficiently enable multifunctional soft robots based on the same, simple, and cost-effective structure, as shown in Figures 1 and 2. The NRS robotic stacking not only stacks actuators in 2D to build an actuator net but also involves a step of rolling–splicing to change the topology 42 and raise the soft actuator net from 2D to 3D, rather than directly increasing the stacking dimension to 3D, by which more functions can be achieved than current 2D structures or other 3D stacking strategies (Table 1).

Multifunctional soft bioinspired robots enabled by the NRS method. NRS, Netting–Rolling–Splicing.

The NRS design framework for designing soft robots with diverse functions and modalities.
We first employed two types of PAMs, that is, contractile PAMs (CPAM) and wrinkle PAMs (WPAM), as the input to build rectangular cells and 2D programmable cell arrays where mortise-and-tenon joints14,43 were used for convenient connections. Actuator nets can then be transformed into 3D robots with both sectional and axial “muscles” and inner “tract” in different unit types (including triangle, quadrilateral, and pentagon ones). The sectional “muscles” enable NRS robots to actuate their bodies not only axially but also sectionally, and the inner tract changes the topology of robots and provides an additional interaction surface. This endows them with multimodal interactions and multiple functions including mono-oscillation crawling, wave crawling, out-pipe/inner-pipe climbing, rotating–climbing, rolling, swallowing/storing/disgorging, and multi-degree-of-freedom (multi-DOF) manipulation, as shown in Figure 1.
To demonstrate the superiority of the NRS method, a TriUnit (the basic or the simplest NRS unit) robot with different WPAM and CPAM arrangements was developed. As a result, the TriUnit robot based on WPAMs can crawl 0.46 ± 0.022 body length per second (BL/s), climb 0.11 BL/s, carry a 3 kg payload while climbing, and achieve omnidirectional pipe crawling, panoramic shooting, and cargo transferring. Several TriUnits were stacked together to conduct bionic wave crawling, robotic swallowing/regurgitating, and multimodal manipulation. The 7-TriUnits robot manipulator with 28 DOFs was able to realize both multi-DOF manipulation and bionic swallowing. The manipulator can not only be used to pick-and-place a payload of 1 kg but also swallow and store objects in its body. A rolling robot based on pentagon unit was also built and able to roll steadily with a speed of 0.19 BL/s.
Main contributions of this work include: (1) the development and implementation of the NRS stacking concept, a new robotic stacking, or topological transformation method that can be used to raise 1D soft actuators to 3D flexible robots; (2) the development of a general analytical and numerical hybrid model, which is able o predict and evaluate the performance behaviors of both WPAMs and normal PAMs in terms of deformability and stiffness variation, thus guiding the programming/reconfiguration of the soft stackable robots; and (3) the design, fabrication, and demonstration of diverse locomotion modes (including crawling, climbing, swallowing, rolling, and manipulation) inspired by living creatures (including worms, monkeys, snakes, spiders, and elephant trunks), based on the same TriUnit. The NRS PAMs based soft stackable robot may bring a new and appealing approach for building multifunctional and multimodal soft robots in a cost-effective and efficient way.
Design and Fabrication
Modeling and characterization of CPAMs and WPAMs
WPAM is a type of extensile PAM (EPAM). The relationship between inner radius and extension ratio usually determines the output performance. The inner radius of WPAM, however, increases with the stretch ratio in the start, which is quite different from normal EPAM or CPAM without wrinkles, and can be used to strengthen the output extension force. The parameters of the CPAMs and WPAMs can be seen in Supplementary Table S1. From Figure 3a and Supplementary Figure S2a, contraction displacements of CPAM increased with increasing the pressure, but its contraction displacements and stroke decreased slightly while increasing the load.

Static and dynamic performance characterization of the CPAM and WPAM.
For example, under 0 g, the maximum contraction displacement and stroke were both 6.08 ± 0.01 mm under 400 kPa, whereas under 2000 g, they were 4.14 ± 0.02 and 5.60 ± 0.02 mm under 400 kPa, respectively. It should be noted that five tests were repeated here. Extension displacements of WPAM also increased with increasing the pressure (Fig. 3b and Supplementary Fig. S2b), while increasing the load (0–2000 g) increased the extension displacement (66.43–100.3 mm) but decreased the stroke (66.43–18.27 mm) significantly as shown in Figure 3b.
We developed a general analytical and numerical hybrid static model, which is applicable for WPAMs and normal PAMs including CPAMs. Considering the initial gap between the bladder and the braid sleeve, and involving the Neo-Hookean hyperelastic material model for the bladder material. The output force of the actuator can be expressed as:
where
According to the test results shown in Supplementary Figure S3c and d, the scale factor of output force to P after the contact,
Then, the section area of the bladder tube
Thus, the geometric relationship between the radius and the length can be defined with two geometric parameters
With this model, we can draw the output of the WPAM and CPAM with three parameters (
The relationship between pressure and response time was measured to characterize the dynamic performance using the setup shown in the Supplementary Data S3. Response behaviors of pressure and displacement curves under 100 to 400 kPa can be seen in Figure 3c and Supplementary Figure S12c, where similar hysteresis effects were observed at different pressures (Supplementary Fig. S12a, b). Inflation and deflation response times of the CPAM and WPAM from 10% to 90% pressures and displacements, under different target pressures, can be seen in Figure 3d and e, respectively. During deflation, the pressure and displacement response times of both CPAM and WPAM tend to increase with the target pressure, whereas their response times during inflation at lower target pressure (e.g., p = 100 kPa) tend to be higher than that at higher target pressures (e.g., p = 200 kPa), especially for the displacement. This may be due to the pressure deadband and the hysteresis effect of the actuator.
Design and fabrication of NRS stackable soft robots
To realize multifunctional and multimodal soft robots in a cost-effective and efficient way, we propose the NRS stacking concept and use it to transform 1D actuators to 3D robots, where the roles of “sectional” and “axial” actuators in the actuation of NRS robots were investigated to provide the basic principles for multimodal and multifunctional robot designs. WPAMs and CPAMs were normal McKibben actuators developed using bladders, braids, and end fittings. 13 In this work, their end fittings were modified by adding the mortise and tenon structures on each end (Fig. 2). Thus, these modular PAMs can be connected with each other via the cubic module with six-direction mortise-and-tenon connections to build 2D actuator nets or 3D robots. Details of the six-direction connection module are added in Figure 2 to better show the mechanisms of the mortise and tenon structure for the plug-and-play connection.
Here, the “Netting” was defined as connecting modular actuators to form a 2D actuator net based on rectangular cells in two perpendicular directions. The “Rolling” was defined as rolling the 2D actuator net in one direction based on the flexibility of PAMs. The “Splicing” was defined as splicing/linking the two end edges of the rolled 2D actuator net to build a 3D actuator structure, as shown in Figure 2. The configuration and function of NRS robots can be programmed in the step of “Netting” by inputting matched actuators, choosing different rectangular cells, and adjusting the cell array arrangement, as shown in Figure 2. By controlling the deformation and stiffness of implemented actuators, the robots can conduct different tasks. And these actuators can be classified into “sectional” and “axial” actuators, which have different roles in the actuation of the robots. For example, the sectional actuators can not only change the sectional scale but also change the cross profile, and the axial actuators can not only vary the axial length but also vary the curvature along the length (Fig. 4).

Sectional and axial actuation of NRS stackable robots based on large deformability and variable stiffness.
For sectional actuations, WPAMs have large extension ratios but less stiffness variations, so the sectional size can not only more than double the origin size (involved in crawling, climbing, and swallowing) but also be able to change its shape by inflating different actuators (involved in rotating–climbing), as shown in Figure 4a(i). However, due to less length changeability but higher stiffness range, even though the sectional CPAMs cannot scale down much and change the shape with triangle configuration, they still can change the sectional profile with variable stiffness (involved in rolling), as shown in Figure 4a(iii).
For the axial actuators, we here show the TriUnit as an example, which has omnidirectional bending and variable stiffness capabilities (involved in manipulation). High stiffness (load bearing of 6 kg) can be achieved using CPAMs, and large bending angles (86°) can be achieved using WPAMs (Fig. 4b and Supplementary Movie S1). Meanwhile, the sectional and axial actuators have some coupled effects on the bending deformation and load-bearing capability.
As can be seen from Figure 4c and d, CPAM and WPAM TriUnit bending angles increased with increasing the axial PAM pressures from 100 to 400 kPa. CPAM TriUnit bending angles increased with the increasing sectional PAM pressures, whereas WPAM TriUnit bending angles decreased with the sectional PAM pressures due to the fact that contraction of the sectional CPAM and extension of the sectional WPAM would decrease/increase the cross-sectional size. The bending angle of the TriUnit is limited to under 90° due to the bucking effect under higher compressing forces when the activated PAMs is further extended. This is because only two ends of each actuator are fastened on the sectional bases. To increase the bending angle range, flexible structures (such as flexible frames or shell sleeves) can be combined with these actuators not only on their ends but also along their lengths.46,47
Under low pressures such as 0 and 100 kPa, axial CPAMs of the CPAM TriUnit buckled at certain loads. For example, under 100 kPa, axial CPAMs buckled at 19.2 ± 1.0 N (Fig. 4e). Under higher pressures from 200 to 400 kPa, no buckling was observed due to the increased load capability achieved by the enhanced stiffness under higher pressure. On the contrary, for the WPAM TriUnit, the load capability decreased with increasing the pressure, mainly due to decreased structural stiffness resulting from the increased length–diameter ratio (Fig. 4f). Sectional PAMs also have a large effect on the load capability, as can be seen in Figure 4g, where the inflation of sectional CPAMs increased the structural stiffness and load capability significantly when the axial PAM pressure was at 200 or 400 kPa (involved in manipulation). This was because the torsion stiffness of sectional CPAMs increased with the pressure significantly (Supplementary Fig. S10b), which changed the boundary conditions of the vertical CPAMs from hinge support to fixed support.
Results
In this section, five locomotion modes (crawling, climbing, swallowing, rolling, and manipulation) of NRS-based robots were achieved with different programmed configurations based on the actuation principles described in the Design and Fabrication section. For each locomotion mode, these actuators were divided into several groups according to their actuation roles in bioinspired locomotions and controlled by periodic sequence signals provided by a specific rhythm generator. Thus, by tuning the oscillation period, amplitude, and phase difference, different robot locomotion speeds, strides, and patterns can be achieved to perform different tasks.
Mono-oscillation and wave crawling of the TriUnit
Crawling is a basic locomotion function of mobile robots. The TriUnit can also be used for a simple unidirectional crawling inspired by earthworms. 48 The TriUnit crawler (equipped with one-way wheels) with three axial WPAMs crawled much quicker than the TriUnit with three axial CPAMs due to the larger inflation stroke that can be achieved by WPAMs (Fig. 5a, b and Supplementary Movie S2). The control strategy of the CPAM and WPAM crawler is inspired by the body creeping and feet locating of caterpillar, as shown in Figure 5c, where only the axial actuators were used for crawling.

Crawling performance characterization of the TriUnit.
Crawling speeds of the CPAM TriUnit increased with increasing inflation time and decreased after reaching the maximum speed of 0.038 ± 0.00017 BL/s (inflation time around 0.35 s), when fixing the deflation time of 1 s (Fig. 5d). It also increased with increasing deflation time and decreased after reaching the maximum speed of 0.045 ± 0.0021 BL/s (deflation time around 0.5 s) when fixing the inflation time of 0.5 s. Crawling speeds of the WPAM TriUnit also reached its maximum speed of 0.46 ± 0.022 BL/s with inflation time around 0.50 s when fixing the deflation time of 1.0 s (Fig. 5e). And it reached the maximum speed of 0.42 ± 0.010 BL/s with the deflation time around 1.0 s when fixing the inflation time of 0.5 s (Fig. 5e).
The inflation/deflation times of the maximum speed states for both the CPAM and WPAM TriUnits meet well with the dynamic response time of the actuators as shown in Figure 3d and e, which reveals that dynamic responsive behaviors are non-negligible to obtain the ideal performance of PAM-based soft robots. Larger deviations shown in the crawling with the TriUnit with WPAMs were due to the decreased stability resulted by the reduced structural stiffness of the TriUnit with increase in the length of the axial actuators.
It is worth noting that the wave crawling locomotion inspired by the earthworm can also be realized by stacking multiple TriUnits with no need for one-way structures such as the one-way wheels (Fig. 5f and Supplementary Movie S2), even its speed (1.44 BL/min) was much lower than these crawlers with one-way wheels. This means that the robot can achieve not only forward motions but also backward motions.
Omnidirectional pipe climbing of the TriUnit
Climbing is an unusual locomotion ability of mobile robots so that they move on various 3D wall surfaces to conduct given tasks. The TriUnit can further be used for both out-pipe and in-pipe climbing (with foot pads shown in Fig. 6a, b and g and see Supplementary Fig. S14 and Supplementary Movie S3). The TriUnit with three axial CPAMs (Fig. 6a) climbed much slower than the TriUnit with three axial WPAMs (Fig. 6b). The locomotion of the CPAM and WPAM climbers is based on the movement of releasing, contraction/extension, and embracing, inspired by arm or leg clamping-and-releasing motion of monkeys and can be seen in Figure 6c and d, respectively. The strategy shown in Figure 6c can also be used for the downward climbing of the WPAM climber, and the strategy shown in Figure 6d is also valid for downward climbing of the CPAM climber.

Climbing performance characterization of the TriUnit.
Climbing speeds of the CPAM and WPAM TriUnits increased with increasing the pressure, as shown in Figure 6e, which corresponds to the increasing displacement with the pressure in Figure 3a and b. Climbing speeds of the WPAM TriUnit, however, decreased with increasing carrying loads as shown in Figure 6f, which agrees well with the decreasing stroke under increasing loads as shown in Figure 3b. The maximum payload of the WPAM climber was around 3 kg, even though there was a slight slipping during climbing (Supplementary Movie S3), which was 36 times of its self-weight (83.1 g).
Besides, more locomotion modes can be realized by changing the control strategies. Owing to the compliant body, both TriUnits can be used to achieve in-pipe climbing as shown in Supplementary Figure S14c and d and Supplementary Movie S3. The TriUnit with axial WPAMs can also achieve clockwise and anticlockwise rotation with a speed of 1.6°/s while climbing out of the pipe, as shown in Figure 6g and Figure S14a and b and Supplementary Movie S3. Its rotation motion depends on the independent control of all nine actuators and their unsymmetrical locomotion, inspired by the cooperation of monkey limbs and spine during lateral arboreal movements (Fig. 6h). It is worth mentioning that the TriUnit with axial CPAMs can be used to conduct rotating movements while climbing in the pipe, even though it was owed to the asymmetric huddling under the constraint of the pipe, as shown in Supplementary Movie S3.
Bionic swallowing and regurgitating based on stacked TriUnits
Swallowing is an essential capability of many living creatures for them to take food. Robotic swallowers can be used for useful grasping32,33 and transporting34–36 applications. In this work, robotic swallowers based on TriUnits were developed for both enveloping gripping and inner-through transporting. Thus, the robotic swallower can not only achieve swallowing and storing but also for animal-like regurgitating and inner material transportation. For better visualization, we stacked three TriUnits together to form a vertical robotic swallower, where two TriUnits were based on both WPAMs and CPAMs, and one TriUnit was based on WPAMs. A 3D printed ball with a diameter of 120 mm and weight of 89 g was vertically swallowed by the robotic swallower (Fig. 7a and Supplementary Movie S4). The swallowing behaviors were realized by the continuous squeezing and pushing of the sectional and axial PAMs, inspired by the snake swallowing and achieved by sequential inflation and deflation of PAM groups 1–6, as shown in Figure 7c.
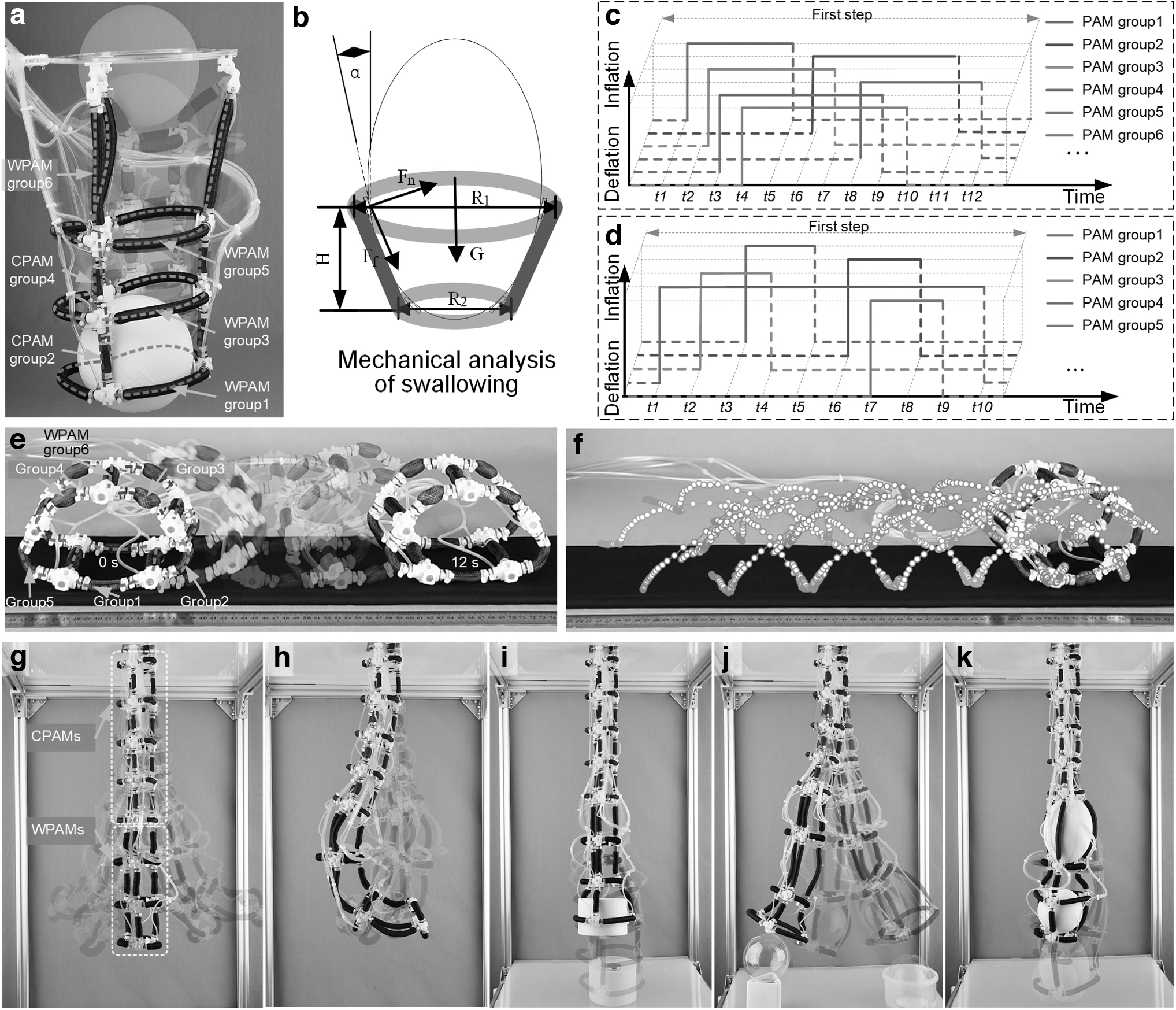
Demonstration of robotic swallowing, rolling, and multimodal bending and manipulation.
We also tested a robotic swallower with three TriUnits based on all WPAMs. With WPAMs as axial PAMs instead of CPAMs, the swallower achieved larger work spaces as shown in Supplementary Movie S4, but due to the larger minimum distance between the two adjacent sections, the swallower with all WPAMs can only swallow and transport the oval ball with larger heights. This was because sectional size and length between each TriUnit are two dominant factors influencing the swallowing performance. From Figure 7b, the condition under which objects can be swallowed and transmitted successfully can be written as below:
This means that when
where
It can be concluded that (1) the minimum distance between each TriUnit should be at least less than half the height of the objects, and (2) both ends of the objects need to be as rounded as possible.
Wheel rolling of the PenUnit from lateral stacking
Rolling is a scarce locomotion ability in animals. Stacking multiple omnidirectional bending units (e.g., TriUnits) can be used for vertical rolling gait. 3 But with only one unit, rolling would become much more challenging as the robot needs a large change of gravity center. To achieve that, lateral stacking of the initial 2D actuator net was involved in the design of the unit, instead of axial stacking. First, the NRS unit based on the quadrilateral cell (abbreviated as QuadUnit) was tested. The QuadUnit has one shape degree of freedom, and the changing range of the center of gravity can meet the requirement of rolling. But its symmetrical structure makes the rolling behavior more random, which limits the controllability of the rolling (Supplementary Movie S5) and makes it only applicable for dynamic rolling49,50 instead of a static rolling.
The pentagon cell based on an NRS unit (abbreviated as PenUnit) was adopted here for robotic rolling as it has two shape degrees of freedom, which is more complex but has higher controllability. Static stable rolling with a speed of 0.28 BL/s was achieved by the PenUnit as shown in Figure 7e and f, where five sectional CPAM groups were used. The rolling locomotion was inspired by the wheel spider and depended on the sectional profile transforming, and as realized by the sequential stiffness changing of five CPAM groups inflated and deflated in sequence, as shown in Figure 7d. Trajectories of the five connection joints, measured by OpenCV with five color marks, can be seen in Figure 7f. It should be noted that the roll speed is limited by the static gait used in the paper and the response ability of the actuator. To increase the rolling speed, dynamic gaits can be applied to reduce the step time and more efficiently utilize the input energy, and higher air pressures can be used to provide higher flow capacities.
Multi-DOF and multimodal manipulation based on stacked TriUnits
Inspired by the dexterous manipulation capability of elephant trunks and swallowing ability of snakes, we stacked four TriUnits based on CPAMs (to enable large enough bending angle range and load carrying capability) and three TriUnits based on WPAMs (to enable decent swallowing and gripping) together. As a result, the NRS soft robotic manipulator has a high flexibility of manipulation and owes 28 DOFs (21 degrees for axial PAMs and 7 degrees for sectional PAM groups). Thus, the manipulator can not only achieve simple omnidirectional curvature bending (Fig. 7g) and complex trajectory bending (Fig. 7h) but also be able to realize that multimodal manipulation includes gripping, transporting, swallowing, and storing, as shown in Figure 7i–k.
The NRS soft robotic manipulator was shown to grip a payload of 1 kg placed in a 3D printed hollowed cylinder (82 g, outer diameter of 130 mm, and height of 90 mm), as shown in Figure 7i. The manipulator was also demonstrated to complete pick-and-place of a transparent plastic ball (70 g, diameter of 120 mm), as shown in Figure 7j and Supplementary Movie S6. Moreover, simultaneous swallowing, transporting, and storing materials can also be achieved like snakes. For instance, a 3D printed sphere ball (125 g, 130 × 180 mm) was swallowed, transported, and stored inside the body, and then, a 3D printed ball (89 g, diameter of 120 mm) was gripped and swallowed continuously (Fig. 7k and Supplementary Movie S6).
Demonstration of panoramic shooting and cargo transferring
Here, we present two task scenarios using the TriUnit robots to demonstrate their potential uses. In the first scenario, we presented an omnidirectional pipe climbing robot carrying a camera (40 g) to explore the surroundings around the pipe. For normal pipe climbing robots, multiple cameras or other structures would be required to cover the view of all angles. Our design can rotate (clockwise/anticlockwise) and climb (up/down) easily to cover the view in every angle and height, as shown in Figure 8a–c and Supplementary Movie S7. In the second task, we present a climbing robot transferring cargos by attaching helical WPAMs as the tentacles. The robot hooked the cargo (153 g) actively, climbed up to lift the cargo, rotated to the other direction, climbed down, and released the cargo on a higher platform. Owe to the omnidirectional pipe climbing and the soft “tentacles,” the pipe climber can transfer cargo in any height and direction around the pipe (Fig. 8d and Supplementary Movie S8).

Demonstration of panoramic shooting and cargo transferring with TriUnit robots.
The two task scenarios not only show the potential applications of the TriUnit robots but also demonstrate that these stackable robots based on PAMs are adjustable for different tasks owing to its modular and soft design. For the demonstration of panoramic shooting and cargo transferring, we aimed to only show the applications of our NRS PAM concept, instead of demonstrating the load bearing or gripping capability of the TriUnit (as showcased in Fig. 7(i) and Supplementary Movies S3 and S6). Nevertheless, greater load capability and gripping forces of both the TriUnit and “tentacle” can be achieved by adopting larger actuator diameters.
Discussion
Soft robots equipped with multiple functionalities have been increasingly needed for various tasks in unknown and unpredictable environments. In this work, we have proposed an enabling robotic stacking methodology, NRS, to design and fabricate modular soft robots with various functions by stacking via convenient plug-and-play mortise and tenon joints. We have introduced the concept of actuator input, cell, cell array, dimension raising, and robotic unit output to assist the design of diverse robots with different features.
With the 2D programming and dimension raising process, the input of only two types of actuators was able to produce 3D robots with diverse functions including mono-oscillation crawling, wave crawling, out-pipe/inner-pipe climbing, rotating–climbing, rolling, swallowing/storing/disgorging, and multi-DOF manipulation. Furthermore, we have developed a general analytical and numerical hybrid model to depict behaviors of both WPAMs and normal CPAMs, including their stretching, bending, shear, and torsion stiffness properties. We have found that the stiffness properties of the input actuators have a significant effect on the performance of the output robots, thus providing useful insights for designing multifunctional soft pneumatic robots.
In Table 1, we have shown that the NRS enabled soft robot, to the best of the authors' knowledge, has the most comprehensive functions, compared with existing stackable soft robots. We have quantitatively compared these robots, as shown in Figure 9, in terms of crawling speed, climbing speed, climbing load capability, rolling speed, bending angle, bending dimension index, inner-through transportation, and enveloping gripping. It is clear that the proposed robot has the best overall robotic performance, which demonstrates the superiority of the NRS method. In addition, panoramic shooting and cargo transferring using the TriUnit robot have further demonstrate the excellent adjustability that is needed for tasks that may find their uses in unstructured and unknown environments.

Quantitative comparison of different multifunctional soft robots with this work, where for enveloping gripping and inner-through transportation, 0 represents unavailable and 1 represents available, and for the bending dimension index, 1 denotes unidirectional, 2 denotes bidirectional, and 3 denotes omnidirectional.
Deformability and variable stiffness are two intrinsic properties of soft tissues, which endow living creatures with excellent adaptability. Our WPAMs and CPAMs own large deformability and have variable stiffness capabilities that can match the actuation requirement of bioinspired robots. To get better performance, these actuators can be fabricated with select parameters based on the proposed general model for WPAM and CPAM to meet the requirement of deformability or stiffness. According Equations (1), (3) and (4),
According to Equation S(46), the bending stiffness of the actuator without bladder effect is also related to the axial force output,
Future work may include but not limited to the following aspects: (1) the inclusion of skeletons and variable stiffness structures to further enhance the loading capability of the aforesaid soft robots; (2) the investigation into other cell types such as hexagon ones and dimension raising methods such as multidirection rolling, staggered stacking, and their combinations, to create more complex robotic configurations; (3) the exploration of other locomotion modes such as swimming in water, burrowing in sands, and sliding on the snow; (4) soft sensors can be integrated onto to the robot to bring proprioceptive and exteroceptive capabilities, and central pattern generators and model-based control methods can be involved with these soft sensors to bring more autonomous and adaptive robots.
Footnotes
Authors' Contributions
J.L. conceived the research. Q.G., L.L., and J.S. designed and fabricated the PAM actuators, modularized robots, and the pneumatic control system. Q.G. and J.W. designed and performed all the experiments, and processed and analyzed the data. Q.G., Y.L., and J.L. interpreted the data and discussed the results. Q.G. and J.G. wrote the article. Q.G. and J.G. jointly proposed the robotic stacking and NRS concept. Y.L. and J.L. directed the research and fully revised the article.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Natural Science Foundation of China, under grant no. 11632005. J.S. was supported by the National Natural Science Foundation of China, under grant no. 12072093.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.