
Abstract
For robot arms to perform everyday tasks in unstructured environments, these robots must be able to manipulate a diverse range of objects. Today’s robots often grasp objects with either soft grippers or rigid end-effectors. However, purely rigid or purely soft grippers have fundamental limitations as follows: soft grippers struggle with irregular heavy objects, whereas rigid grippers often cannot grasp small numerous items. In this article, we therefore introduce RISOs, a mechanics and controls approach for unifying traditional RIgid end-effectors with a novel class of SOft adhesives. When grasping an object, RISOs can use either the rigid end-effector (pinching the item between nondeformable fingers) and/or the soft materials (attaching and releasing items with switchable adhesives). This enhances manipulation capabilities by combining and decoupling rigid and soft mechanisms. With RISOs, robots can perform grasps along a spectrum from fully rigid, to fully soft, to rigid-soft, enabling real-time object manipulation across a 1.5 million times range in weight (from 2 mg to 2.9 kg). To develop RISOs, we first model and characterize the soft switchable adhesives. We then mount sheets of these soft adhesives on the surfaces of rigid end-effectors and develop control strategies that make it easier for robot arms and human operators to utilize RISOs. The resulting RISO grippers were able to pick up, carry, and release a larger set of objects than existing grippers, and participants also preferred using RISO. Overall, our experimental and user study results suggest that RISOs provide an exceptional gripper range in both capacity and object diversity.
Introduction
Across food processing, parts manufacturing, and assistive caregiving, there is a need for robot arms that can grasp and manipulate a diverse range of everyday objects.1–4 Industry-standard arms often use rigid grippers that pinch items between two or more nondeformable fingers.5–9 However, these rigid grippers are not able to pick up and hold objects that are small, numerous, or irregularly shaped (e.g., a pile of candy). To address these shortcomings, recent works have developed a variety of soft grippers using mechanisms such as gecko-inspired adhesives,10–14 granular jamming,15,16 electroadhesion,17–19 or responsive materials.20–26 But soft grippers have a separate grasping domain and are often unable to hold the large heavy items that rigid end-effectors are able to pick up and carry (e.g., a bottle of syrup). When a robot arm leverages grippers that are either purely rigid or purely soft, it fundamentally limits the types of objects that robot can manipulate.
We therefore seek to expand the range of graspable objects by combining rigid and compliant components within the robot’s gripper. Recent works have started to develop grippers that integrate both elements.27–35 However, within existing designs the rigid and soft capabilities are inherently coupled; for example, robotic fingers that alternate between rigid links and soft joints. By contrast, our core insight is that we can decouple and couple the rigid and soft mechanisms by combining traditional rigid end-effectors with soft adhesive sheets. This decoupling has the potential to fundamentally increase the range of robotic grasps as follows: from purely rigid (e.g., manipulating a bottle of syrup) to purely soft (e.g., picking up a pile of candy) to a combination of rigid and soft (e.g., holding beads of multiple sizes).
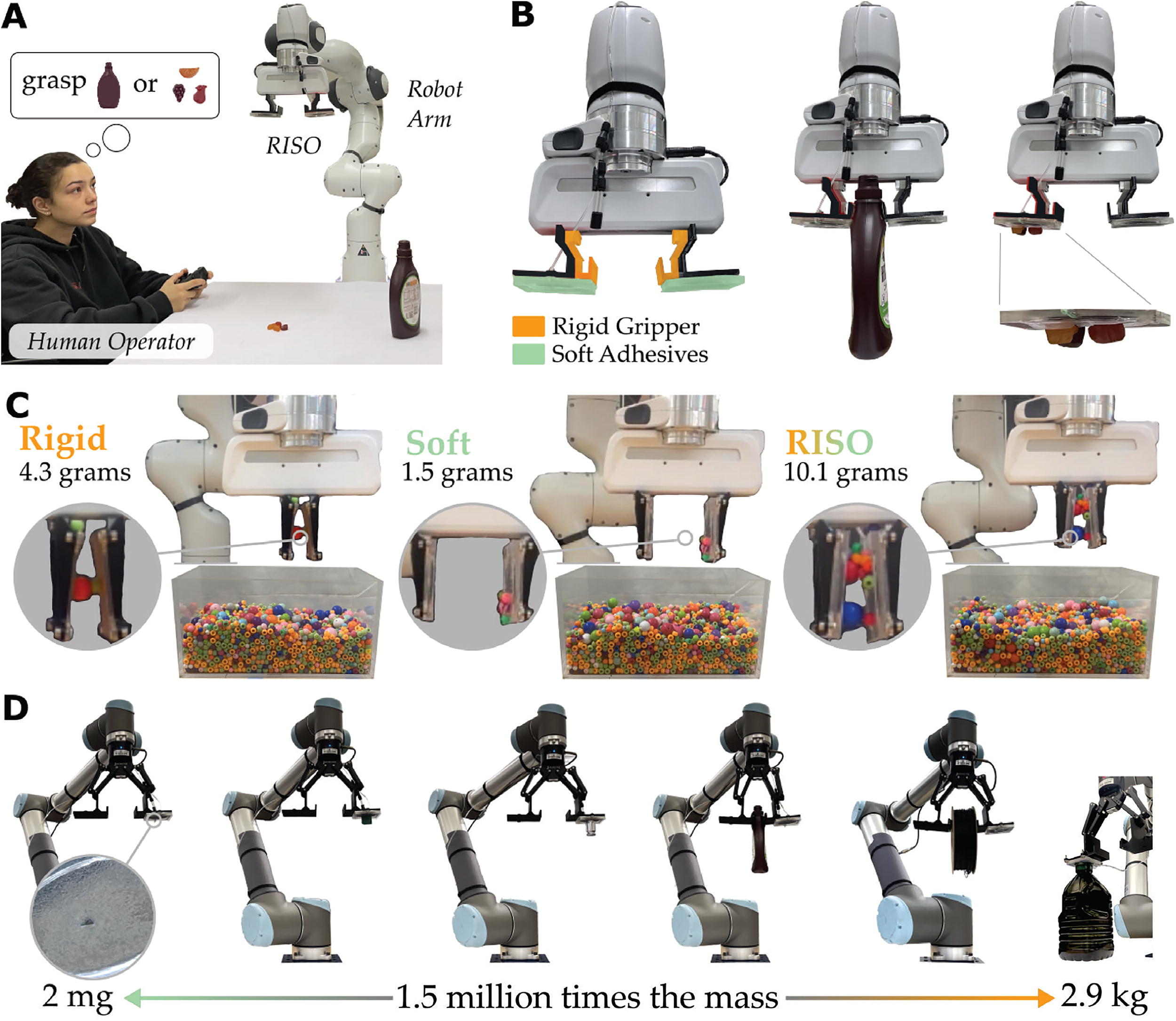
We leverage our insight to create RISOs, robotic grippers that unify RIgid end-effectors with SOft materials (see Fig. 1A, B). RISOs are formed by mounting sheets of switchable adhesives onto the surfaces of rigid robotic fingers and then controlling both the rigid and soft components during manipulation tasks. When the robot arm moves to pick up an item, it can (1) pinch the object between the fingers of the rigid gripper, (2) cause the object to stick to the soft surfaces, or (3) use a combination of the rigid pinch and soft adhesion to hold the object (see Fig. 1C). In practice, RISO advances the range of robotic grasping by combining and decoupling purely rigid and purely soft grippers. For example, RISOs can grasp objects in real time across a 1.5 million times range in mass—picking up, carrying, and releasing objects from 2 mg to 2.9 kg (see Fig. 1D, Supplementary Figs. S6 and S7).
RISO enhances grasping by combining and decoupling rigid and soft mechanisms.
We first explored the feasibility of RISO in preliminary work. 36 In this article, we now make the following contributions toward a unified framework for RISO grippers:
Characterizing gripper capabilities
Functionally, our soft materials take the form of flat silicone sheets that we can rapidly control to switch between grasping and releasing in less than 0.1 s. We characterize the gripping force applied by these structures as a function of the grasped object’s radius, curvature, roughness, and porosity. We find that the soft materials combine both adhesion (i.e., using surface forces to attach to the object) and wrapping (i.e., constricting around the object), achieving forces reaching 50 N in idealized testing conditions.
Integrating RISOs with robot arms and human users
We recognize that increased gripping capability is not meaningful if robot arms and human operators cannot harness RISOs. Accordingly, we develop control strategies with varying levels of autonomy to make it easier for robots and humans to utilize RISOs. In particular, we present a shared autonomy approach that (1) uses the human’s joystick inputs to infer their desired object and grasp type and then (b) autonomously aligns the RISO to complete the intended grasp. We show that this shared autonomy method reduces the number of human inputs needed to complete manipulation tasks.
Comparing to existing grippers
We perform grasping experiments with robot arms and human operators to compare RISOs, an industrial soft gripper, and a granular jamming gripper. Across both autonomous and human-controlled conditions, we observe that robots equipped with RISOs are able to pick up, hold, and release a more diverse range of everyday objects. User responses to Likert scale surveys indicate that our participants subjectively rated the RISO gripper as easier to user and more preferable than the tested state-of-the-art alternatives.
Demonstrating practical applications
We finally showcase our system’s practical abilities in assistive scenarios by controlling a robot arm and RISO gripper to make pizza. Here the human teleoperates the arm and RISO to manipulate larger food objects (e.g., placing the crust, spreading the sauce) and arrange smaller food items (e.g., pepperoni, pepper, and olive toppings). When viewed together, our results suggest that RISOs provide an exceptional gripping range in both capacity and object diversity, clearly distinguishing our framework from the baselines. These advances provide a path forward for robotic grippers, particularly within unstructured environments where manipulation of diverse and unexpected items is essential. See videos of our RISOs and experiments at https://youtu.be/du085R0gPFI.
Materials and Methods
Here we present our mechanics and control approach for RISO grippers. In the “Creating RISO grippers” section, we explain the physics behind the soft adhesives, as well as their fabrication process. We then form RISOs by mounting sheets of these pneumatically actuated soft materials onto the surfaces of rigid end-effectors. This combination of a rigid gripper and adhesive sheets introduces new control variables as follows: for example, deciding whether to use the soft adhesives or rigid grippers to pick up an object. In the “Controlling RISO grippers” section, we partially automate these decisions and make it easier for humans and robot to control RISOs by developing a share autonomy approach for RISO grippers.
Creating RISO grippers
To understand the adhesive capacity of the soft gripper, we start with the underlying physical relationship between adhesive force Fc, contact area, and gripper compliance as follows37,38:
Here A is the contact area between the soft gripper and the target object, C is the gripper’s compliance in the loading direction, and Gc captures the fracture energy of the interface. In practice, Gc can be treated as the energy per unit area that needs to be applied to separate the interface between gripper and object. In the case of reversible adhesives that do not rely on covalent chemical bonds,39–41 higher Gc can be achieved through viscoelastic dissipation or other lossy processes at the interface.
For object manipulation, it is essential to be able to pick up and then subsequently release diverse objects. One challenge with soft grippers that utilize adhesion is to make an adhesive strong enough to pick up an object but weak enough so that the object can be released. To pick up a wide range of objects, from small delicate items to large heavy objects, adhesives have to achieve strong and releasable adhesion within the same material. So the range of mass that a gripper can manipulate becomes a key metric. Therefore, of particular interest for adhesive-based object manipulation is the ability to dramatically increase Fc when gripping an object and then rapidly decrease Fc when releasing that object. To maximize Fc, Equation (1) demonstrates that A should be increased, C should be decreased, and Gc should be high. Typically, to achieve high contact area A between the gripper surface and the surface of the object, the gripper should be as soft as possible. However, to minimize compliance C, the gripper also needs to be as stiff as possible. To accommodate these contrasting design directions, we focus on the overall A/C ratio between contact area and compliance. We propose an adhesive design that is soft during initial contact between gripper and object (increasing contact area A) and then becomes rigid while maintaining that same contact area (decreasing the compliance C). Accordingly, to achieve a large A/C ratio, it is desirable for the adhesive to be tunable so that the compliance can be changed during contact to first increase A and then decrease C.
We apply these principles to create the soft adhesive for RISO grippers. This adhesive consists of a tunable elastomeric membrane on a foam foundation (see Supplementary Fig. S1 for fabrication details). We actively control the membrane through pneumatic pressure (see Supplementary Fig. S2), allowing for three primary states as follows: neutral pressure where the membrane is flat, positive pressure when the membrane inflates, and negative pressure where the membrane is constricted (decreased compliance). Grasping and releasing items is achieved by switching between these states.
Release
To release an item, we want to minimize Fc. Our soft adhesive achieves this by switching from negative pressure to positive pressure and inflating the membrane (Supplementary Fig. S3). This inflation causes the contact area to decrease, minimizing the ratio A/C.
Neutral to negative
To increase Fc and adhere to an object, our soft gripper can use two different processes. The first is neutral to negative, where the membrane is initially at atmospheric pressure. We start the grasp by bringing the membrane into contact with the object and then apply a negative pneumatic pressure to increase the stiffness of the membrane and foundation. This decreases C while having a negligible effect on contact area A, increasing gripper force Fc (see Fig. 2A).

Measuring the force capacity of RISO’s soft adhesives.
Positive to negative
To further increase the grasping force, we can alternatively start the membrane at a positive pressure (i.e., the membrane is initially inflated). Here the membrane is first inflated into a hemispherical shape and then pressed into the object to be grasped. This causes the object to embed into the inflated membrane and maximizes A by creating both side and normal contacts. The pressure inside the membrane is then decreased, causing the membrane to tightly constrict around the object. This minimizes C during the loading phase while also activating debonding mechanisms that can increase Gc (see Fig. 2B).
To create RISOs, these soft adhesive sheets are mounted onto the surfaces of rigid robotic grippers. Our approach is not tied to any specific rigid base; RISOs can be formed by attaching the adhesive sheets to a variety of commercially available robotic grippers. In our experiments, we test a rigid Robotiq gripper 7 as well as a Franka gripper. 42 The placement of the adhesive sheets is also modular as follows: They can be put on the base of the gripper (Fig. 1B) or parallel to the gripper fingers (Fig. 1C). This mechanical combination and decoupling provides the fundamental advantage of our design as follows: We can have purely rigid, purely soft, or combined rigid/soft grasps depending on where the soft adhesives are mounted. However, the combination also introduces control challenges as follows: Standard control schemes for the rigid gripper may not be sufficient when the robot needs to coordinate grasps using both the rigid and soft mechanisms.
Controlling RISO grippers
RISO has the potential to enhance grasping capabilities by combining and decoupling rigid and soft mechanisms. But to harness these capabilities, we must integrate RISOs with robot arms and human operators. The key challenge here is that RISOs introduce new low-level variables (e.g., the pressure of the soft adhesives) and high-level decisions (e.g., choosing to grasp an object with the soft materials, the rigid gripper, or both). Below we formulate this control problem for RISO grippers. We then introduce solutions with varying levels of automation: from fully automated, to fully human controlled, to a shared autonomy approach between the human and robot.
Formulating the control problem
We consider settings where an RISO gripper is the end-effector of a robot arm. Let
There are two inputs used to move the robot arm and actuate the RISO gripper. First, the robot can take autonomous actions
Shared autonomy for RISO grippers
We developed three control strategies for RISO grippers along a spectrum of autonomy. At one extreme is fully autonomous control: here the robot arm acts in isolation without any human guidance. The robot leverages its RGB-D camera to detect objects in the workspace and then autonomously moves the arm with actions
Between these robot and human extremes, we propose a shared autonomy framework for RISO grippers. This approach is designed to integrate the human, robot, and RISO while reducing the human’s workload. Intuitively, under our approach the robot (1) infers the desired object
In practice, Equation (3) causes the robot arm to autonomously move toward likely objects while aligning the RISO gripper for the human’s preferred grasp. This leads to a shared autonomy framework where the human is responsible for high-level decisions (e.g., which object to grasp) and the robot assists with the low-level variables (e.g., moving the robot arm directly above the object and automating the pressure changes for the soft adhesive). Our resulting shared autonomy approach is distinct from related works44–46 because we not only need to infer the human’s goal object but also how the human wants to use the RISO to grasp that object.
Results
In this section, we conduct experiments and user studies to explore the capabilities of RISO grippers. We start by exploring how adhesion and wrapping mechanisms contribute to the soft material’s overall gripping force (“Measuring the force capacity of RISO’s soft adhesives” section) and then characterize gripping forces as a function of the target object’s radius, curvature, roughness, and porosity (“Characterizing RISO’s soft adhesives across diverse objects” section). Equipped with this understanding of the soft components, we next apply RISOs in systems with robot arms and human operators. In the “Comparing RISOs to existing grippers” section, we compare the range of objects that robots can grasp when using RISO grippers, industrial soft grippers, and a granular jamming gripper. We also conduct user studies to assess how easy it is for robots and humans to utilize RISOs with autonomous control, human control, and shared autonomy (“Reducing effort with shared autonomy” section). Put together, these four experiments characterize the soft components of RISOs, compare RISOs to state-of-the-art alternatives, and demonstrate how our controllers improve gripper performance and ease of use.
Measuring the force capacity of RISO’s soft adhesives
We start by measuring the soft adhesive’s force capacity when grasping an indenter (e.g., a target object) under controlled conditions. Figure 2C and D shows the force profiles for a 12.5 mm smooth indenter. To conduct these tests, the soft membrane was first brought into contact with the indenter, and then the membrane state was switched to a negative pressure. We finally pulled the soft gripper and indenter apart from one another until the two separated, enabling us to measure the total adhesive force Fc (see Supplementary Fig. S4). Under the positive-to-negative condition, the membrane was initially inflated (Fig. 2B), whereas for the neutral-to-negative condition, the membrane started at atmospheric pressure (Fig. 2A).
Figure 2E extends our results across indenters of different radii. To provide a baseline for these results, we included a positive-to-positive condition where the membrane was always inflated. As expected, in this positive-to-positive case, the adhesion was very low for all indenter radii; because the membrane never decreased its compliance, it was unable to achieve higher Fc values. Next, we increased the adhesion force by switching between neutral and negative states. Here we observed higher Fc as the indenter radii increased (i.e., as the contact area increased), and the soft gripper was able to reach a grasping force of 18 N for the 12.5 mm indenter. We finally repeated these same tests with the positive-to-negative condition. As before, the force capacity Fc increased with the radius of the target object, but now the grasping forces were larger because of the combination of adhesive and wrapping mechanisms (Fig. 2B). In the positive-to-negative condition, the soft adhesive reached a maximum gripping force of 50 N for an indenter radius of 12.5 mm.
Based on the adhesive scaling analysis from Equation (1), we plot Fc vs.
Another important parameter for manipulation is the adhesion switching ratio,
Characterizing RISO’s soft adhesives across diverse objects
In the “Measuring the force capacity of RISO’s soft adhesives” section, we focused on idealized objects to explore the mechanics behind the soft adhesives. We next move toward diverse objects and characterize how RISO’s soft adhesive can grasp items as a function of their curvature, roughness, and surface porosity (see Fig. 3). For each type of object, we measured the gripper’s force capacity when using the neutral-to-negative grasp (i.e., adhesion dominated), as well as the positive-to-negative grasp (i.e., combined adhesion and wrapping).
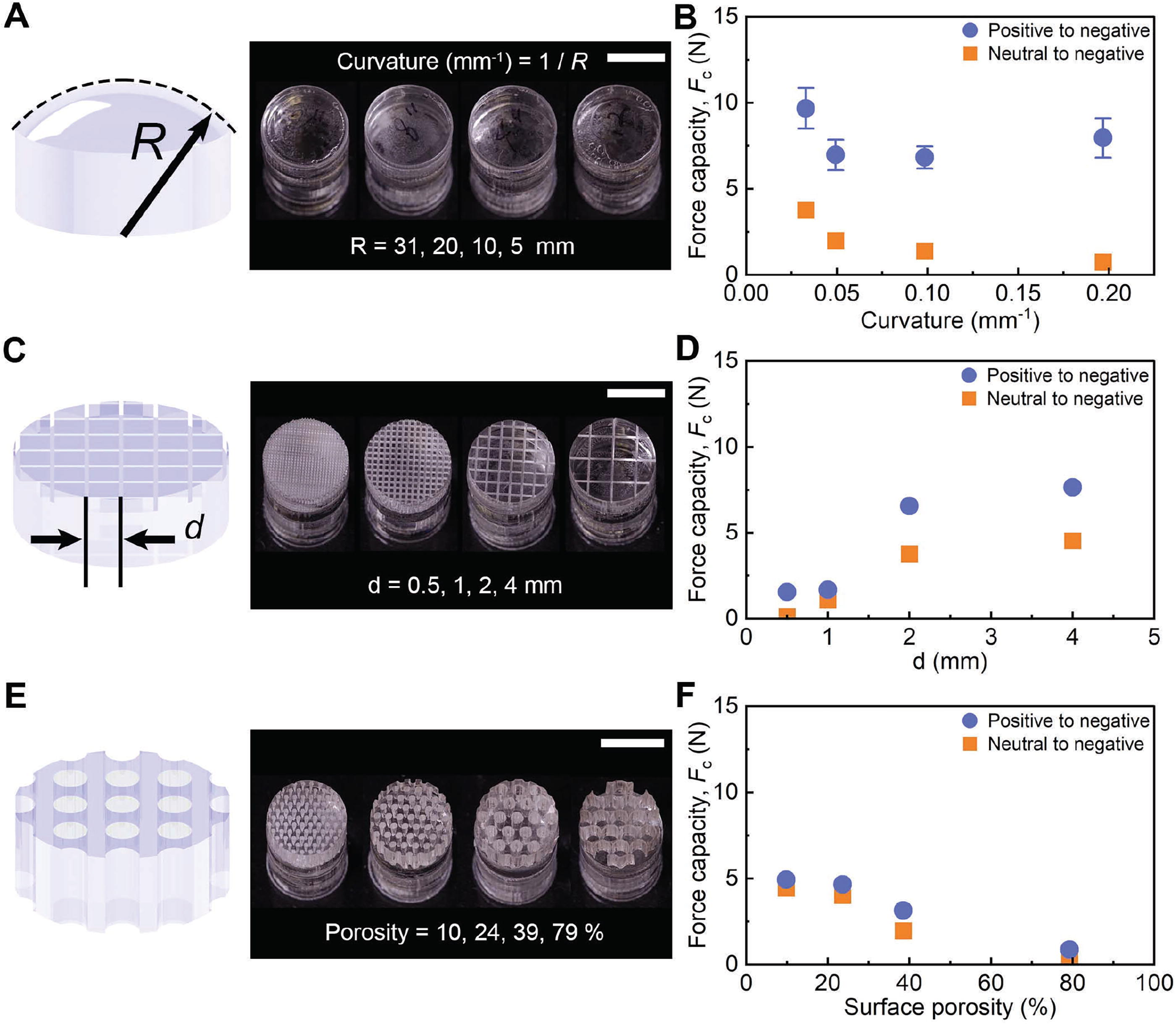
Characterizing RISO’s soft adhesives across diverse objects.
We start with curved indenters in Figure 3A, B. Here the soft adhesive’s performance depended on the actuation strategy as follows: in the neutral-to-negative case, Fc decreased as the curvature increased, whereas with the positive-to-negative pressure change, Fc was roughly constant. Intuitively, we might expect the force capacity to be lower for more curved items because of a decreased surface area (i.e., the soft adhesive was only making contact with the tip of the indenter). The wrapping effect within the positive-to-negative condition mitigated this issue and enhanced the force capacity across all curvature values. We next tested target objects with engraved surfaces to create effective controlled roughness (see Fig. 3C, D). When the engraved lines were closer together, the surface was more rough—leading to lower contact area A and smaller Fc values. Conversely, when the lines were far apart, the surface was more smooth, resulting in a larger contact area and gripper forces. Here we observed a small improvement of the positive-to-negative over the neutral-to-negative condition. Finally, we measured the adhesive force when grasping objects of different surface porosity (see Fig. 3E, F). As the porosity increased the surface area decreased—this led to lower force capacity across both gripper conditions. Nonetheless, even with a surface porosity of nearly 80%, RISO’s soft gripper was able to generate adhesion forces of up to 0.9 N. RISO’s ability to grasp porous objects, as well as discrete objects of different sizes as seen in Figure 1C, contrasts with vacuum grippers. Vacuum gripper struggles to grasp and hold porous and discrete objects because they cannot maintain an airtight seal; by contrast, RISO takes advantage of its dynamic surface adhesion to grasp and release these challenging objects.
Comparing RISOs to existing grippers
Over the previous two experiments, we isolated the soft component of RISO grippers under idealized conditions. Moving forward, we will unify these soft materials with rigid end-effectors to form RISO grippers. Our core insight is that RISOs combine and decouple the rigid and soft gripper mechanisms, enabling grasps along a spectrum from purely rigid, to purely soft, to rigid–soft. We hypothesize that this decoupling will fundamentally increase the range of objects that RISOs can pick up, hold, and release. To test this hypothesis, here we explore the range of objects that robot arms and human operators can grasp with RISO grippers and state-of-the-art alternatives.
Independent variables
We compared three different grippers as follows: RISO, an industrial SoftGripper, 48 and a granular jamming gripper 15 (see Fig. 4B and Supplementary Fig. S5A). Each of these grippers was mounted at the end-effector of a 7-DoF FrankaEmika robot arm. 49

Comparing RISOs to existing grippers.
To understand how these different grippers performed in isolation—without any human guidance—we applied our autonomous controller from the “Controlling RISO grippers” section. Here the robot arm identified objects with a camera and then autonomously moved its gripper to align with the detected object. Next, to test how the grippers performed with a human-in-the-loop, we applied the human controller from the “Controlling RISO grippers” section. Under this approach, humans operated a joystick to remotely control the robot arm and attached grippers without any autonomous assistance. We recruited 12 participants (4 females, average age 22.9 ± 2.73) from the Virginia Tech community to take part in this study. All participants provided informed written consent following university guidelines (IRB #22-308). The order in which participants used the grippers was randomized as follows: some started with RISO, others started with a SoftGripper, and others started with the granular jamming gripper.
Dependent variables
The gripper, robot arm, and human operator collaborated to pick up, carry, and then drop a dataset of 15 household objects (see Fig. 4A and Supplementary S5B). During each interaction, the system manipulated one item as follows: The interaction was considered a success if the gripper picked up an object, carried it across the table, and dropped it in the bin. To measure the user’s perception of each gripper, we also conducted a 7-point Likert scale survey within the human-in-the-loop condition. Our questions focused on how easy it was to use the gripper and whether participants preferred one gripper over the alternatives (see Fig. 4E and Supplementary Table S1).
Autonomous results
Figure 4C shows the results of the autonomous test. This experiment compared the performance of RISO, the SoftGripper, and a granular jamming gripper when the robot’s behavior was fully automated. Across all objects and 10 autonomous trials, the manipulation success rates were SoftGripper: 56%, Granular: 51%, and RISO: 93% (see Supplementary Table S2). These differences in performance were statistically significant. A repeated measures ANOVA revealed that the gripper type had a significant effect on the overall success rate across 10 trials [
Human-in-the-loop results
Figure 4D summarizes our results across 12 human participants. This experiment compared the performance of RISO to state-of-the-art alternatives when the system was fully controlled by human operators. We again found that the gripper type had a significant effect on the grasping success rate [
Comparing grippers
Whether the grippers were controlled directly by humans or autonomously by the robot arm, RISO was able to grasp, carry, and drop a more diverse range of items than the SoftGripper or Granular jamming gripper. In Figure 4F, we break down these results for some sample objects in the dataset (see all object success rates in Supplementary Table S2). Across both human and autonomous control, the pneumatic SoftGripper failed to pick up small numerous items (e.g., the nuts) or items that slip through the soft fingers (e.g., the quarter). Similarly, the granular jamming gripper struggles to grasp flat objects that the gripper cannot wrap around (e.g., the plate). RISO is able to overcome these limitations through its decoupled design as follows: We can use the soft adhesive sheets to pick up small numerous items and the rigid end-effector to grasp large heavy objects.
Reducing effort with shared autonomy
When comparing RISO to state-of-the-art grippers in the “Comparing RISOs to existing grippers” section, we tested the extremes of our controls spectrum as follows: fully autonomous or fully human controlled. Both of these control modes have advantages. On the one hand, an autonomous robot can optimize the low-level variables introduced by RISO grippers (e.g., the normal force and pneumatic pressure). On the other hand, a human can specify high-level targets and grasps (e.g., selecting whether to use the rigid, soft, or rigid–soft gripping mechanism). In the “Controlling RISO grippers” section, we combined the benefits of both approaches under a shared autonomy method for RISO grippers. This method integrates the human, robot arm, and RISO gripper as follows: Based on the human’s joystick inputs, the robot and RISO infer the human’s desired object and then automate the arm and gripper behavior to help complete the task.
Independent variables
We compared our proposed shared autonomy method to systems completely controlled by the human. Twelve new participants from the Virginia Tech community (2 females, average age 24.1 ± 4.5 years) provided informed consent and took part in this user study (IRB
Dependent variables
Participants operated the robot and RISO to pick up, carry, and then drop the same 15 household items as in the “Comparing RISOs to existing grippers” section (also see Supplementary Fig. S5B). Our underlying hypothesis was that shared autonomy would make it easier for humans to leverage the RISO gripper. To measure changes in efficiency, we recorded the amount of time users actively controlled the robot with joystick inputs and the total length of the robot’s trajectory. Grippers that are easier to use should complete manipulation tasks with as little human guidance as necessary (e.g., fewer joystick inputs and shorter trajectory length). We also administered a 7-point Likert scale survey to assess the participants’ subjective outcomes. Our questions are listed in Supplementary Table S3 and ask about how helpful, easy to use, and intuitive the system was.
Shared autonomy results
In Figure 5B and C, we present the results of this user study. Paired t-tests revealed that the overall grasping success rates were not significantly different for either human control or shared autonomy (

Making it easier for humans to utilize RISOs.
Discussion and Conclusion
In this work, we covered the surfaces of rigid end-effectors with a novel class of soft adhesives to form RISOs: RIgid–SOft grippers. Our underlying hypothesis was that RISOs would enhance grasping capabilities by both combining and decoupling rigid and soft mechanisms. Because the rigid and soft components were combined, RISO could perform rigid–soft manipulation, and because the components were decoupled, RISO could also perform purely rigid or purely soft grasps. We experimentally found that this combination enabled robots to overcome the fundamental limitations of each individual component. In our user studies, robot arms and human operators successfully utilized RISOs to pick up, move, and release a wide range of objects as follows: from flat items to 3D objects, from single items to multiple objects, and from small items to large objects. These enhanced grasping capabilities are practically useful in settings such as food processing, parts manufacturing, and assistive caregiving. We demonstrate one practical application in Figure 6, where a human operator utilized our RISO gripper to assemble a pizza. This required grasping large flat objects (the crust), manipulating tools (spreading the sauce and cheese), and picking up, transporting, and releasing small irregular food items (the pepperoni, peppers, and olives). Because RISO can perform grasps along a spectrum from purely rigid to purely soft, the robot completed each of these diverse manipulation tasks with a single gripper. Moreover, we have grasped a 2.9 kg plastic cooking oil bottle with the soft adhesive (Supplementary Fig. S7). Overall, we have demonstrated that RISOs provide exceptional gripping range to rapidly manipulate small lightweight objects (2 mg) to heavy complex items (2.9 kg) (over a 1.5 million times range in mass) and that robots and humans can effectively utilize these grippers in unstructured environments (with higher grasping success and user ratings compared with state-of-the-art alternatives).
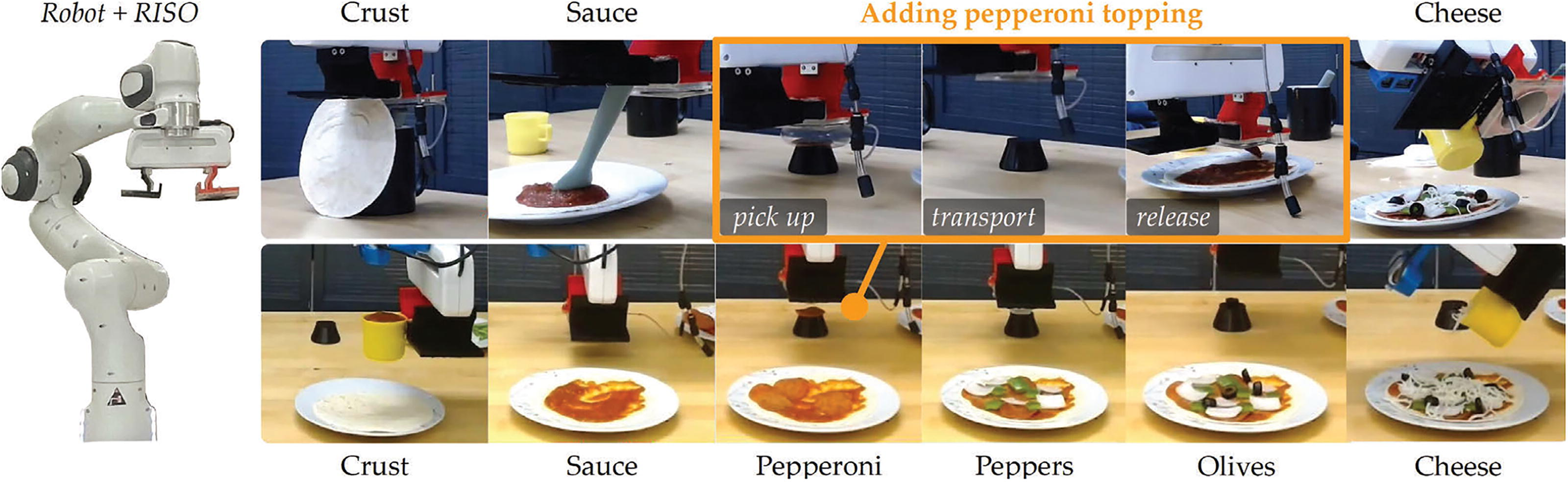
RISO grasps and manipulates multiple food items to assemble a pizza. A human teleoperated the robot arm and attached RISO gripper. Here we show snapshots of the resulting task from a side view (top row) and an overhead view (bottom row). The RISO used purely rigid grasps to manipulate the crust, spread the sauce, and pour the cheese. For small and numerous toppings, the RISO used purely soft grasps: picking up, transporting, and releasing the pepperoni, peppers, and olives with the soft materials. See Supplementary Video for the overall task.
Another outcome of our studies was that the control scheme impacts the objective and subjective performance of the RISO gripper. This demonstrates that the way the human and robot are integrated with the gripper can have an effect on gripper outcomes. In particular, adhesion effectiveness is often characterized in controlled environments (i.e., static loading with precisely controlled alignment on testing machines) and considered to be a function of the adhesive alone.38,50,51 However, when the adhesive or gripper is integrated with a robot arm and human user, this system now experiences variable inputs and motions that can significantly impact the functional adhesion capabilities. From the soft material viewpoint, this signifies the importance of designing in tolerance to misalignment and applied forces, consideration of adhesion switching speed and the ability to maintain high forces during the full object manipulation process, and integration of soft adhesives into larger robotic systems.
Footnotes
Data Availability
Authors’ Contributions
Conceptualization: D.P.L. and M.D.B. Data curation: M.K. and Y.K. Formal analysis: M.K., Y.K., S.A.M., J.H., R.R.S., E.P., and C.M. Funding Acquisition: D.P.L. and M.D.B. Supervision: D.P.L. and M.D.B. Visualization: M.K., Y.K., S.A.M., J.H., R.R.S., E.P., C.M., D.P.L., and M.D.B. Writing—draft/review/editing: M.K., Y.K., S.A.M., J.H., R.R.S., C.M., D.P.L., and M.D.B.
Author Disclosure Statement
All authors declare that they have no competing interests.
Funding Information
This work was supported, in part, by the National Science Foundation (Grant #2205241).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.