This article considers a classical optimal design problem of finding saturated D-optimal designs for the quartic polynomial model for mixture experiments. The necessary and sufficient conditions of the optimality criterion are confirmed by using the corresponding equivalence theorem.
Mixture experiments have been extensively used in different disciplines such as agriculture, pharmaceutical science, chemical science and nutritional science. For the components mixture system, the response is assumed to be a function of component proportions denoted by . Further, in a mixture experiment, it is also assumed that the response of interest does not depend upon the amount of the mixtures. For example, in the case of a gasoline blend, where the response of interest is the gasoline research octane number at 2.0 g, which depends only on the proportion of the ingredients present in the mixture, that is, butane, alkylate, light straight run, reformate, catalytically cracked and others (see Snee and Marquardt [1]). The set containing the mixture becomes a dimensional simplex and can be represented as:
In general, the construction of optimal designs aims at making the predicted response closer to the mean response over a particular region based on a specific criterion. In the literature, different optimality criteria have been discussed, such as D-optimality, A-optimality, E-optimality, R-optimality and V-optimality. The works of Kiefer and Wolfowitz[2] and Kiefer[3] are the pioneering contributions related to optimal designs for mixture experiments.
The research work on optimal designs for mixture experiments continues to attract the attention of many learned scholars to carry out their research work in this particular domain. Recently, many articles were published that discuss the construction of optimal designs for various models of mixture experiments, such as Pal and Mandal,[4] Panda and Sahoo[5–7] and Panda.[8, 9] For more detailed information on optimal designs for mixture experiments, readers may refer to the work of Sinha et al.[10]
The canonical polynomial models proposed by Scheffè[11] are widely used for analyzing mixture data, especially Scheffè’s quadratic model is quite useful for analyzing agricultural and industrial data. However, there are also higher-degree canonical polynomial models, such as cubic and quartic polynomial models, for mixture experiments defined in the literature. One should prefer cubic and quartic polynomial models in comparison to quadratic models if the interest is to model the curvature in the interior of a factor space. For more details, one can refer to the work of Cornell.[12]
Kiefer[3] obtained D-optimal designs for Scheffè’s models of degrees one, two and three. He proved that a saturated design that allocates equal weight to each vertex of the simplex region is the D-optimal design for the first-degree Scheffè’s polynomial model. Further, he also showed that the simplex-lattice design that allocates equal weight to each support point is D-optimal for the second-degree Scheffè’s polynomial model. For the three-component mixture, he also obtained saturated D-optimal designs for the full cubic model, the cubic model without a three-way effect, and the special cubic model. Subsequently, Farrell et al.[13] and Lim[14] derived the D-optimal designs for the general cubic polynomial model with two and three mixture components, respectively. Mikaeili[15, 16] obtained D-optimal designs for the cubic model without the three-way effect and the full cubic model, respectively, when the mixture contains q components. Recently, Panda[17] obtained saturated R-optimal designs for quadratic canonical polynomial for mixture components as well as for different forms of cubic polynomial mixture models, that is, full cubic, cubic without a three-way effect and special cubic mixture models in three mixture components.
Zhu and Hao[18] investigated A-optimal designs for the special cubic mixture model. Panda[9] found A-optimal designs for the cubic model without a three-way effect for -mixture components. The work on finding optimal designs for Scheffé’s canonical polynomial model is, at most, limited to the cubic model in the current literature, and to the best of the author’s knowledge, the problem of finding optimal designs for Scheffè’s quartic polynomial model is not yet discussed in the literature. In this article, we have attempted to find saturated D-optimal designs for the quartic canonical polynomial model when the mixture contains three and four mixture components. The advantage of using a saturated design lies in its ability to estimate the parameters of interest with the minimum number of experimental runs, while also simplifying the computational procedure.
The article is structured as follows. Section 2 discusses the D-optimal design and the corresponding equivalence theorem. In Section 3, we obtain D-optimal designs for the Scheffè’s quartic polynomial model. Finally, we conclude the article with some discussion and conclusions in Section 3.
D-optimal Design and Equivalence Theorem
Let us consider a regression model of the form:
where denotes the expected response, is the input variable, and is the regression function. Further, we shall assume that all responses are independent of each other and have constant variance. A continuous design has the following form (see Kiefer [19]):
where are the different design points defined over . is the weight associated with the point , j = 1, 2, …, m. Here is defined as the set of all continuous designs. A non-singular information matrix for a design can be defined as:
over .
Throughout this article, we consider the design points of the form: and , by we shall mean that are in the ratio and by we shall mean that for some permutation of . For further details, refer to the article of Chan and Guan.[20]
Next, we define the D-optimal design and the equivalence theorem for the D-optimality criterion, which would be useful to derive the main result.
Definition 2.1. A design with an information matrix for model Equation (2.1) is called a D-optimal design if it minimizes over the set .
Kiefer and Wolfowitz[21] proposed an equivalence theorem, stated as Theorem 2.1, that is quite useful for examining the necessary and sufficient condition for the determination of D-optimal design over the simplex region.
Theorem 2.1.A continuous designis said to be a D-optimal design for the model Equation (2.1) if and only if
where and is the number of parameters involved in the model Equation (2.1). Furthermore, the supremum exists at the support point of.
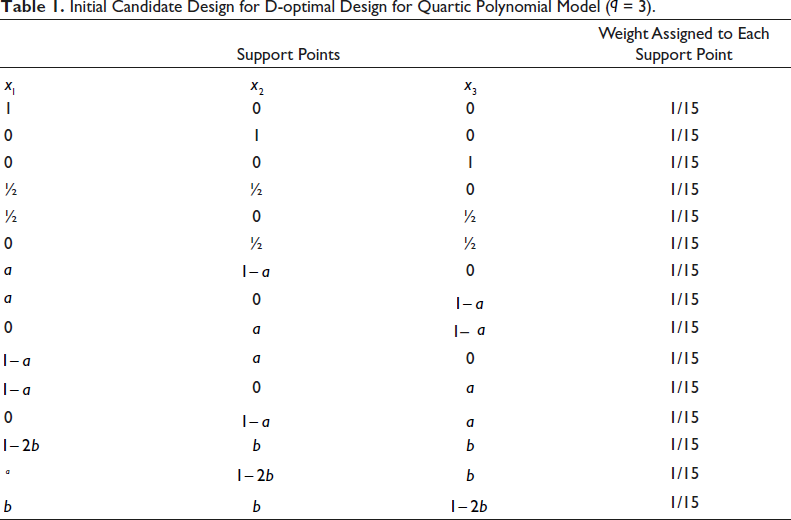
Initial candidate design: A saturated design having number of design points is D-optimal if the weight assigned to each design point is 1/ (see Silvey [22]). Based on this result, we consider the initial candidate design (as mentioned in Table 1) for finding the D-optimal design for the quartic polynomial model for the three-component mixture.
Initial Candidate Design for D-optimal Design for Quartic Polynomial Model ( = 3).
Support Points
Weight Assigned to Each Support Point
1
0
0
1/15
0
1
0
1/15
0
0
1
1/15
½
½
0
1/15
½
0
½
1/15
0
½
½
1/15
0
1/15
0
1/15
0
1/15
0
1/15
0
1/15
0
1/15
1/15
1/15
1/15
D-optimal Designs for Quartic Model
The quartic model can be expressed as follows:
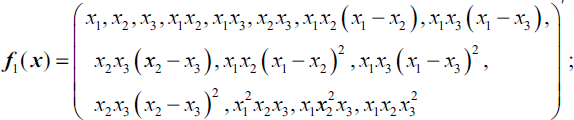
when (see Gorman and Hinman)[23]. In Equation (3.1), and are the column vectors of dimension each and are denoted by:
When , the quartic model can be represented as (see Gorman and Hinman)[23]:
Here and are column vectors of length and are denoted by:
In the next theorem, we obtain the D-optimal design for the model Equation (3.1).
Theorem 3.1.The designthat allocates weightto each of the support points, , andwith, is the D-optimal design for the model Equation (3.1).
Proof. Let be a saturated design that allocates weight to each of the support points , , and . For the design , the information matrix of the form Equation (2.2) is given by:
where the submatrices are given by:
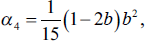
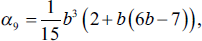
The involved coefficients in Equation (3.3) are given by:
Next, the function is obtained as:
Here, denotes a constant that remains unaffected by any design-related issues. The non-zero restriction of in Equation (3.4) leads to the following:
To maximize Equation (3.4), we derive the partial derivatives of it with respect to and and set them equal to 0. Thus, we get:
Similarly, in Equations (3.6) and (3.7), both and are constants that remain independent of any design-related factors. Now, solving the systems of Equations (3.6) and (3.7), we have the following cases:
(a) = 1, = ½;
(b) = 1/2, = 1/3;
(c) ;
(d) .
Out of the above cases, cases (a) and (b) are not feasible due to the restrictions mentioned in Equation (3.5). Further, cases (c) and (d) lead to the values and . Due to the constraints given by Equation (3.5), the values and are infeasible. Therefore, we consider the remaining feasible solutions of the system of Equations (3.6) and (3.7), which are as follows: and .
Replacing the values of and in the left hand side of Equation (2.3), we get the expression of . Due to its considerable length, the expression for has been omitted from this study; nevertheless, it can be provided by the authors upon request.
Next, using the ‘fminsearch’ command of MATLAB software, we find that This establishes the necessary and sufficient condition of the equivalence theorem. This proves the theorem.
Remark 2.1. We extend the findings presented in Theorem 3.1 to the case of four-component mixture experiments. Due to the high-dimensional structure of the associated information matrix and the complexity of the function the formal proof of this result is not included here. However, the proof is available from the authors upon request. In this extended setting, the D-optimal design consists of 35 distinct support points. These include the points , , , and where the constants and are defined as in Theorem 3.1.
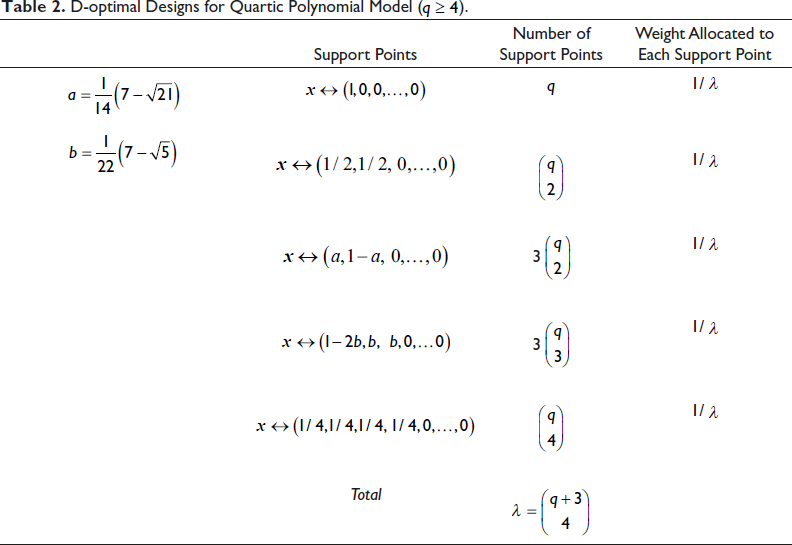
Remark 2.2. The computation of the inverse of the information matrix becomes a bulky task because the information matrices are of large dimensions, for example, it shall be a square matrix, when Also, the information matrix for model Equation (3.2) seems to be an unstructured one. Thus, we restrict ourselves to handling the problem up to . However, we firmly believe that the above-mentioned results can be generalized to the q-mixture components. Therefore, we conjecture the following result for Scheffè’s quartic canonical polynomial model given in the form of Table 2, when the mixture contains components.
D-optimal Designs for Quartic Polynomial Model ().
Support Points
Number of Support Points
Weight Allocated to Each Support Point
1/
1/
3
1/
3
1/
1/
Total
Discussion and Conclusions
The present article obtains saturated D-optimal designs for Scheffè’s quartic polynomial model. To the best of our knowledge, this article is the first of its kind that obtains the optimal designs for the quartic canonical polynomial model.
The consideration of finding A-optimal, V-optimal and R-optimal designs for a quartic polynomial model can be interesting for future studies.
Footnotes
Acknowledgement
The authors would like to express their thanks to the referees and the Editor for their valuable suggestions that significantly improved the quality and readability of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The authors received no financial support for the research, authorship and/or publication of this article.
ORCID iD
Mahesh Kumar Panda
References
1.
SneeRD and MarquardtDW.Extreme vertices designs for linear mixture models. Technometrics1974; 16(3): 399–408.
2.
KieferJ and WolfowitzJ.Optimum designs in regression problems. Ann Math Stat1959; 30(2): 271–294.
3.
KieferJ.Optimum designs in regression problems, II. Ann Math Stat1961; 32(1): 298–325.
4.
PalM and MandalNK.Optimum designs for parameter estimation in mixture experiments with group synergism. Commun Stat Theory Methods2021; 50(9): 2001–2014.
5.
PandaMK and SahooRP.D-optimal designs for Scheffé’s quadratic mixture model with spline involving two insensitive components. Int J Stat Reliab Eng2022; 9(1): 108–117.
6.
PandaMK and SahooRP.A-optimal designs for cubic polynomial models with mixture experiments in three components. Stat Appl2022; 20(2): 41–55.
7.
PandaMK and SahooRP.R-optimal designs for linear log contrast model with mixture experiments. Commun Stat Theory Meth2024; 53(7): 2355–2368.
8.
PandaMK.Model robust optimal designs for Kronecker model for mixture experiments. Int J Stat Sci2024; 24(1): 31–48.
9.
PandaMK.A-optimal designs for cubic model without a 3-way effect for mixture experiment. Hacet J Math Stat2024; 53(6): 1759–1773.
SchefféH.Experiments with mixtures. J R Stat Soc Ser B1958; 20(2): 344–360.
12.
CornellJA.Experiments with mixtures. New York: John Wiley & Sons Inc.; 2002.
13.
FarrellRH, KieferJ, and WalbranA.Optimum multivariate designs. In: Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, Volume 1: Statistics; 1967Jan1. Vol. 5. Berkeley, CA: University of California Press; pp. 113–139.
14.
LimYB.D-optimal design for cubic polynomial regression on the q-simplex. J Stat Plan Inference1990; 25(2): 141–152.
15.
MikaeiliF.D-optimum design for cubic without 3-way effect on the simplex. J Stat Plan Inference1989; 21(1): 107–115.
16.
MikaeiliF.D-optimum design for full cubic on q-simplex. J Stat Plan Inference1993; 35(1): 121–130.
17.
PandaMK.R-optimal designs for canonical polynomial models with mixture experiments. Calcutta Stat Assoc Bull2021; 73(2): 146–161.
18.
ZhuX and HaoH.A-optimal design for the special cubic mixture model. Commun Stat Theory Methods2024; 53(3): 1081–1090.
19.
KieferJ.General equivalence theory for optimum designs (approximate theory). Ann Stat1974; 2(5): 849–879.
20.
ChanLY and GuanYN.A- and D-optimal designs for a log contrast model for experiments with mixtures. J Appl Stat2001; 28(5): 537–546.
21.
KieferJ and WolfowitzJ.The equivalence of two extremum problems. Can J Math1960; 12: 363–366.
22.
SilveySD.Optimal design. London: Chapman and Hall; 1980.
23.
GormanJW and HinmanJE.Simplex lattice designs for multicomponent systems. Technomet1962; 4(4): 463–487.