
Abstract
Objective:
We investigated whether intelligent advanced warnings of the end of green traffic signals help drivers negotiate the dilemma zone (DZ) at signalized intersections and sought to identify behavioral mechanisms for any warning-related benefits.
Background:
Prior research suggested that warnings of end of green can increase slowing and stopping frequency given the DZ, but drivers may sometimes respond to warnings by speeding up.
Method:
In two simulator studies, we compared six types of roadway or in-vehicle warnings with a no-warning control condition. Using multilevel modeling, we tested mediation models of the behavioral mechanisms underlying the effects of warnings.
Results:
In both studies, warnings led to more stopping at DZ intersections and milder decelerations when stopping compared with no warning. Drivers’ predominant response to warnings was anticipatory slowing on approaching the intersection, not speeding up. The increased stopping with warning was mediated by increased slowing. In Study 1, anticipatory slowing given warnings generalized to green-light intersections where no warning was given. In Study 2, we found that lane-specific warnings (e.g., LED lights embedded in each lane) sometimes led to fewer unsafe emergency stops than did non-lane-specific roadside warnings.
Conclusion:
End-of-green warnings led to safer behavior in the DZ and on the early approach to intersections. The main mechanism for the benefits of warnings was drivers’ increased anticipatory slowing on approaching an intersection. Lane-specific warnings may have some benefits over roadside warnings.
Application:
Applications include performance models of how drivers use end-of-green warnings, control algorithms and warning displays for intelligent intersections, and statistical methodology in human factors research.
Keywords
Introduction
In two driving simulator studies, we investigated the effectiveness of intelligent warnings for drivers negotiating high-speed signalized intersections. These roadside or in-vehicle displays provided advanced warning of the end of the green traffic signal phase to drivers faced with the “dilemma zone” (DZ). We define the DZ as a critical point on approach to an intersection where drivers face the “dilemma” of either stopping or proceeding through the intersection with roughly equal perceived risk (cf. Gazis, Herman, & Maradudin, 1960; U.S. Department of Transportation [USDOT] & Federal Highway Administration [FHWA], 2004; Wei, 2008). The location (in distance or time) at which 50% of drivers stop has been deemed the middle of the DZ.
Stopping at the intersection when in the DZ may require hard braking, thus exposing a driver to a rear-end collision, whereas proceeding through a DZ intersection may expose the driver to right-angle collisions with crossing traffic running a red light. In the United States in 2009, there were 1.2 million crashes at signalized intersections (FHWA, 2012). Of these, 372,000 involved fatalities or injuries; this figure was 24% of all crash-related fatalities or injuries. In a study of how to improve safety at signalized intersections in Texas, Messer, Sunkari, Charara, and Parker (2004) noted that many new signalized intersections are high speed due to population growth outside city centers.
In the current studies, we investigated one way to help drivers negotiate the DZ: providing an intelligent warning of the impending end of the green phase. This system is intelligent in the sense that it warns drivers who are predicted to be approaching the DZ based on sensed information about their speed and location. We tested a particular advanced warning system—the Detection, Control, and Warning System (Zimmerman, Tolani, Xu, Qian, & Huang, 2012)—which is designed to reduce the number of drivers exposed to the DZ by extending green lights. When extending the green phase is no longer possible, the system warns drivers that they are likely to experience a yellow onset in the DZ if they maintain speed.
To evaluate the effectiveness of these intelligent warnings, we used a simulator to compare driving behavior at high-speed intersections when drivers received or did not receive warning. In Study 1, we evaluated three methods of displaying warnings to drivers. The single-pole display had two vertically aligned flashing lights and a sign reading, “Green about to end when flashing.” This display was similar to the current sign, “Prepare to stop when flashing” (named W3-4 in FHWA, 2012). However, in the single-pole display, the flashers activated only for vehicles predicted to be in the DZ, whereas the W3-4 flashers activate whenever the traffic signal is yellow or red. The flexible-poles display was designed to be more conspicuous than the single-pole display by displaying advanced warnings farther from the intersection and using movement. It used a series of short poles with lights on top extending for 300 ft along the right shoulder. During a warning, the lights seemed to move along the series of poles ahead of the driver, as poles flashed farther from, then nearer to, the intersection.
The onboard equipment (OBE) display employed a dashboard LCD display. The warning involved the abrupt onset of a textual and graphic message accompanied by loud beeps. This display is an example of the newly developed connected-vehicles concept, in which vehicles communicate with other vehicles and traffic control systems electronically (USDOT, 2013). The control, no-warning condition used only a static warning sign with an appropriately colored traffic signal icon (W3-3) on the road shoulder. This is the standard sign currently used to warn of an intersection ahead. It provides no warning of end of green.
In Study 2, we compared lane-specific warnings (e.g., on an overhead bridge above each lane) to non-lane-specific roadside warnings and to a no-warning condition.
One purpose of these studies was to investigate the extent to which advanced warning displays affected safety-related driving outcomes (e.g., stopping frequency at DZ intersections). Additionally, we wanted to understand the driving behaviors that led up to these outcomes, that is, how drivers responded to or anticipated warnings as they approached intersections. Therefore, we developed a high-level description of the stages that decision-making drivers make on approaching signalized intersections. In the anticipation stage, on approaching any signalized intersection, drivers sometimes detect the presence of an upcoming traffic signal well before they need to make a stop-go decision. At this point, safety-conscious drivers may decide to slow down in order to negotiate the intersection safely (we called this anticipatory slowing). In the stop-go stage, nearer to the intersection, drivers perceive the traffic signal phase and make a stop-go decision. If the phase is red or green, this decision is relatively easy. If the phase is yellow, drivers base their decision on perceiving their time to arrival at the intersection (Lee, 1983) and comparing it to their expectation of the yellow-phase duration.
Drivers could respond to end-of-green warnings in various ways at each of these stages.
Warnings could induce drivers to slow in advance of an intersection (anticipation stage), which should lead to more frequent stopping at the intersection (stop-go stage). Two studies provided empirical support for this response pattern. Caird, Chisholm, and Lockhart (2008) used a simulator to study the effects of intelligent warnings on a head-up display 8 s to 12 s before end of green. Compared to no warning, warnings led to more slowing on approach to the intersection and more frequent stopping. Messer et al. (2004) conducted a before-after on-road study of the effect of intelligent warnings delivered by a roadside flasher 5 s to 6 s before end of green. At two high-speed signalized intersections, the warnings reduced red light running relative to no warning.
Drivers could refrain from slowing at the anticipation stage but, near the intersection (stop-go stage), stop if the warning display is activated and maintain or increase speed if it is inactivated. Pant and Huang (1992) and Pant and Xie (1995) provided evidence for this pattern in field studies of high-speed signalized intersections with warning flashers that always flashed 9 s before the end of green. These drivers sometimes sped up when warning displays were visible but inactivated.
Drivers could refrain from anticipatory slowing (as in Pattern 2) and then speed up in response to an activated warning to beat the light.
If they do not understand or trust warnings, drivers could ignore them.
Which of these behavioral response patterns drivers engage in probably depends on a variety of factors, including how conspicuous and reliable the warnings are, how well drivers understand the warnings’ meaning and trust them, drivers’ long-term risk-taking tendencies, and their short-term incentives regarding safe versus time-efficient driving. It was beyond the scope of our research to ground these potential response patterns in a comprehensive theory encompassing all of these causal factors. However, the warning displays we tested were designed to be conspicuous, clear, and reliable, so we did not expect drivers to ignore them (Pattern 4). Drivers who are more cautious would be expected to exhibit anticipatory slowing (Pattern 1), whereas drivers who take more risks might slow less and use inactivated warnings to maintain speed or activated warnings to speed up (Patterns 2, 3). In the current simulator studies, we collected detailed behavioral data on drivers’ responses to warnings that are unavailable in field studies. These data allowed us to determine which of the aforementioned response patterns drivers exhibited.
Experimental Factors
In both studies, a main independent variable (between subjects) was the two levels of end-of-green warning (some vs. none); within this variable, there were three types of warning in each study. We presented all drivers with three DZ intervals. On-road studies have usually defined the DZ as occurring when the driver is 2.5 s to 5.5 s from the intersection at yellow onset (Bonneson, Middleton, Zimmerman, Charara, & Abbas, 2002). On the basis of our own pilot testing and research suggesting that drivers using simulators are more alert and therefore have their DZ shifted closer to the intersection (Caird, Chisholm, Edwards, & Creaser, 2007), we set our simulator DZ to range from 2.1 s to 3.4 s. Given the nature of the DZ, stopping should increase with longer DZ intervals.
The studies of end-of-green warning by Caird et al. (2008), Messer et al. (2004), and Pant and Huang (1992) all used warnings 5 s to 12 s before end of green. However, because the warning system we tested controls the traffic signal and warns of the DZ only when it cannot be prevented, the system is constrained to give DZ warnings only 1.5 s to 3 s before end of green. The current studies allowed us to test whether our shorter warning lead times are effective. We did not expect our two warning lead times to differentially affect performance.
Finally, we tested drivers from a wide age range and an approximately equal gender ratio in order to determine whether our findings applied to these groups. We also measured individual differences in our participants’ tendency for caution versus risk taking to see if they correlated with their behavioral response to warnings. We did not have hypotheses about the effects of these individual differences on driving behavior.
Study 1
In this experiment, each participant went through 36 high-speed intersections that included DZ yellow traffic signals and continuous green signals over a 45-min drive. We measured how the presence or absence of end-of-green warnings affected outcome variables and process variables describing how drivers responded to warnings.
Method
Design
The experiment used a between-subjects factor, warning group (flexible poles, single pole, OBE, no warning) and two within-subjects factors, intended DZ duration (2.1 s, 2.75 s, and 3.4 s) and intended advanced warning lead time (1.5 s and 3.0 s).
Participants
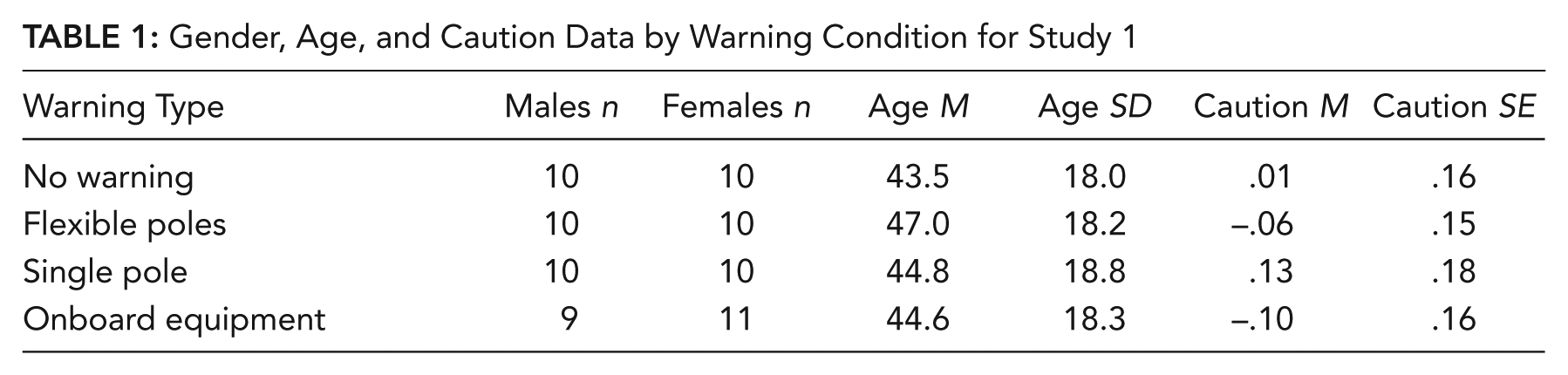
The 98 participants were recruited from the Clemson, South Carolina, area. Participants were prescreened for visual, driving, and motion sickness requirements. During the study, 15 participants were dropped because they exhibited high motion sickness scores; 3 were dropped because of errors in the simulator software or hardware. The 80 participants (41 female) were randomly assigned to the warning conditions, such that each condition had an approximately equal number of older and younger participants and males and females. For each warning condition, Table 1 shows gender, age, and caution versus risk-taking scores (higher scores mean more caution). The age and caution means did not differ across warning groups (F < 1). Participants were compensated $20 for completing the study.
Gender, Age, and Caution Data by Warning Condition for Study 1
Materials and tasks
A DriveSafety DS-600c Research Simulator was used for this study (Drive Safety, 2010). This is an immersive, full-cab, fixed-base simulator with eight visual display channels. Five projectors each display a 182 × 139 cm image (1,024 × 768 pixels) on panels to the front and side of the cab, which provides a 300° wraparound display. Three rear mirror displays are mounted on side and center locations.
Each 20-km scenario drive took about 15 min. The participants were instructed to stay in the right-hand lane and not make turns. The yellow phase interval was 5.1 s, and the all-red clearance interval was 1.3 s, based on the speed limit of 55 miles per hour (88 km/h) and formulas from the Institute of Transportation Engineers (2007). Each scenario included 12 intersections. The 36 intersections across the three scenarios included these types of intersections: 16 DZ intersections (five 2.1-s, six 2.75-s, and five 3.4-s DZ intervals); three very short yellow lights, with yellow onset 1 s before the stop line (outside the DZ); three very long yellow lights, with yellow onset 12 s before the stop line (outside the DZ); 13 continuous green lights; and one hazard intersection at the last intersection of the final scenario. These intersection types were approximately balanced across the three scenarios, and the order of intersection types within each scenario was approximately random. The scenario with the hazard always occurred last; the order of the other two scenarios was counterbalanced.
We informed drivers about the function of the advanced warning system using only roadside signs with textual messages, simulating on-road conditions. However, using the usual font size for roadside signs would have resulted in illegible text due to the lower simulator screen resolution. Therefore, for the two warning conditions that required roadside text signs, flexible poles and single pole, we used two versions of the signs: a more detailed message using a smaller font size that could be read only while the driver was stopped and a brief message using a larger font size that could be read while the driver was up to speed. The detailed sign was shown before each scenario with the driver stopped. The brief sign was shown at all other intersections. In order to increase font size, rectangular signs were used instead of the normal diamond-shaped warning signs.
The four warning conditions were as follows:
Flexible poles (Figure 1): Twelve poles, each 4 ft (1.2 m) high with a simulated light source on top, were located on the right side of the road, spaced 50 ft (15.2 m) apart beginning 50 ft from the intersection stop line. During a warning presentation, three adjacent poles approximately 150 ft (45 m) ahead of the driver flashed on for 0.66 s and off for 0.33 s. This flash cycle was displayed twice for a 1.5-s warning lead time and four times for a 3.0-s lead time. For the 3.0-s lead time, the location of the flashing poles advanced to move with the driver so that the last two flashes appeared on three poles closer to the intersection. A sign preceded these poles at 1,000 ft (305 m) from the stop line reading, “GREEN ENDING IF FLASHING.” The initial practice sign read, “GREEN ABOUT TO END WHEN PYLONS FLASHING.”
Single pole (Figure 2): There was a sign mounted on a single pole at 131.2 ft (40 m) from the stop line reading, “GREEN ENDING IF FLASHING.” The initial practice sign read, “GREEN ABOUT TO END WHEN FLASHING.” The sign had two yellow lights, one directly above and one below the sign. In a warning presentation, the lights flashed alternating from top to bottom, with each light on for 0.5 s and then off for 0.5 s. Three flashes (top-bottom-top) were visible for the 1.5-s warning lead time and six for the 3.0-s lead time.
OBE: In a warning presentation, an in-vehicle LCD monitor 7 in. wide by 4 in. (17.8 × 10.2 cm) located on the center console displayed a sign reading, “Green about to end when flashing” next to an appropriately colored traffic signal icon (like the roadside W3-3 sign) while three loud rapid tones sounded. The display and tones would begin either 1.5 s or 3.0 s before the end of green and terminate 1.5 s after onset. The only roadside sign was the same as in the no-warning condition.
No warning: A sign showing an appropriately colored static traffic signal icon was located 1,000 ft (305 m) from the stop line.

Flexible poles flashing an advanced warning (actual display was in color).

Single pole sign flashing an advanced warning (actual display was in color).
The Bailey-Lovie acuity test (Bailey & Lovie, 1980), the Pelli-Robson contrast sensitivity test (Pelli, Robson, & Wilkins, 1988), and the Ishihara Test for Color Blindness (Ishihara, 1979) were administered. Simulator sickness was measured using the Motion Sickness Assessment Questionnaire (MSAQ; Gianaros, Muth, Mordkoff, Levine, & Stern, 2001). To assess caution versus risk taking, two eight-item subscales of the Driving Stress Inventory (Matthews, Desmond, Joyner, Carcary, & Gilliland, 1997), Hazard Monitoring and Thrill Seeking, were administered. A sign comprehension survey assessed participants’ understanding of the meaning of the warning displays.
Procedure
Participants were prescreened by a phone interview and excluded if they had abnormal vision, were susceptible to motion sickness, or were not an active licensed driver. After informed consent, participants completed the initial MSAQ and the vision tests (all participants met our acuity criteria of better than 20/50). Then, participants were told their goals for the drive (stay in right lane, follow speed limit, drive normally but get to your destination in a reasonable amount of time). Next, participants completed two drives to practice controlling the vehicle, left the simulator, and completed a demographic survey and the second MSAQ. For this and all other MSAQ administrations, participants were stopped if they recorded a 5 or higher on any item or their scores on multiple items increased markedly from the previous administration.
Before each scenario, participants entered the simulator and were prompted by the experimenter to repeat their driving goals. During each scenario, if participants entered the left lane, the experimenter asked them to return to the right lane. After each scenario, participants exited the simulator, completed the MSAQ, and took a 10-min break. After the final scenario, participants completed the sign comprehension survey (except in the no-warning condition) and the Driving Stress Inventory and were compensated. The session took around 1 hr and 45 min.
Results and Discussion
Measurement and statistical plan
Predictor variables included warning versus no warning, anticipatory slowing, DZ length, the lead time between warning and end of green, and (to control for effects of individual differences) gender, age, and caution. Caution was a composite based on two subscales of the Driving Stress Inventory, Hazard Monitoring and Thrill Seeking. Higher scores indicated more caution. The dependent measures were stopping frequency at DZ intersections and mean deceleration rates during stopping. The data for the final hazard event and the sign comprehension test were not included due to lack of space.
The 80 participants experienced 2,320 total intersections that were used in our data analyses. Of these, 6 intersections were dropped due to anomalies: 1 because the participant violated instructions and went in the left lane, 3 because the experimenter gave the participant incorrect verbal instructions during the drive, and 2 because the experimenter stopped the scenario too soon. Eighteen intersections had problems, including participants going into the left lane, the audio going out, and incorrect experimenter instructions, but these intersections were kept because they were deemed not to affect the behavior we measured.
Multilevel modeling (MLM, also known as hierarchical linear modeling) was used for data analyses (Tabachnik & Fidell, 2007). Driving behavior at individual intersections was the unit of analysis (cases). Behavior at intersections was represented by the binary stop-go variable and continuous variables (e.g., deceleration rate). For the stop-go variable, the method of generalized estimating equations was used (Ballinger, 2004); this method specifies a dependent variable with a binomial distribution and a logit link function (as in logistic regression). Continuous predictor and outcome variables were assessed for normality, and some variables with excessive skew were transformed. Outlier values greater than 3 standard deviations from the mean were set to be 3 standard deviations from the mean. Continuous predictor variables were mean centered. Contrasts comparing two conditions were tested with one-tailed tests if hypothesized and two-tailed tests otherwise.
Factors predicting stopping frequency at DZ intersections
Figure 3 shows the expected behavior given the first hypothesized driver response pattern to warnings, in which warned drivers show increased anticipatory slowing relative to no warning, and this greater early slowing leads to increased stopping relative to no warning. Stating this pattern statistically, anticipatory slowing mediates the effect of warnings on stopping (Links a and b), so that the direct effect of warnings on stopping (Link c) is negligible. The analysis of stopping frequency was done on the 14 noncurve DZ intersections each participant experienced, since curves were a confounding factor possibly affecting slowing and stopping. The cases in these models were 1,120 intersections (80 × 14) minus 3 intersections excluded due to missing data.
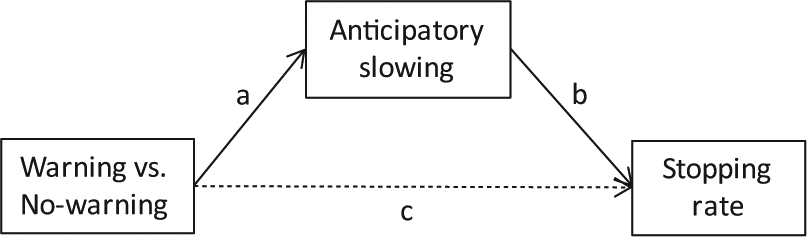
Mediation model of factors affecting stopping rate at dilemma zone intersections.
Anticipatory slowing was measured as follows. For all DZ intersections, when drivers passed the sensor (305 m from the stop line), the traffic control system measured their speed and calculated the distance from the stop line that would yield the intended DZ length, assuming drivers maintained this speed. The green phase ended when drivers reached this distance from the stop line. (This procedure mimicked how the control system we tested predicts DZ exposure.) However, drivers who slowed after passing the sensor would experience a longer-than-intended DZ. Since drivers often slowed near the sensor, and slowed by varying amounts, they experienced a variety of actual DZs. Thus, the actual DZ interval experienced by drivers had two components: the intended DZ set by the experimental design and the change in the DZ (usually an increase) due to the drivers’ changing speed on approaching intersections. We defined a new variable using the formula Actual DZ = intended DZ + DZ extension (all in seconds). DZ extension indicated slowing between the sensor and the end-of-green location if positive and speeding up if negative and was used as our variable measuring anticipatory slowing.
Testing for mediation
Baron and Kenny (1986) have described the conditions under which a mediating variable (e.g., anticipatory slowing) can mediate the causal effects of another variable (warning vs. no warning) on a dependent variable (stopping frequency). For this example, Step 1, warning level must have an effect on slowing (Figure 3, Link a); Step 2, warning level must have a direct effect on stopping when slowing is not included as a predictor (Link c); and Step 3, when slowing (Link b) and warning level predict stopping in the same model, the effect of warning level is much reduced compared to when warning type is the only predictor (Step 2). We tested these predictions using models in which stopping was predicted by warning group, DZ extension, intended DZ, gender, age, and caution. Since the caution predictor was not significant in early models, we eliminated it in later models but kept gender and age. Caution, gender, and age effects are not reported because we had no hypotheses about those variables, and they had no major effects on performance.
Direct effects on anticipatory slowing (Step 1)
For the model with DZ extension (anticipatory slowing) as the dependent variable, warning group was a significant predictor, F(3, 74) = 7.04, p < .001, but intended DZ was not. The estimated marginal mean DZ extension for the OBE, single-pole, flexible-poles, and no-warning groups was 0.54 s, 0.51 s, 0.43 s, and 0.10 s, respectively. Each of the three advanced warning means for DZ extension was significantly greater than the no-warning mean, as predicted; but the means for the three warning types did not differ significantly from each other (p > .35). Thus, warnings led to about 0.5 s of anticipatory slowing that gave these groups 0.4-s-longer DZs than the no-warning group. Also, warned drivers seemed less likely to speed up on approaching the intersection—they had negative DZ extension values for 11% of intersections—compared to unwarned drivers, who sped up at 26% of intersections.
These findings support the hypothesis that drivers use warnings to increase their anticipatory slowing when approaching an intersection (Response Pattern 1) and argue against the hypotheses that drivers avoid early slowing (Patterns 2 and 3) and frequently speed up in response to activated warnings (Pattern 3). Importantly, for the no-warning group, DZ extension time was positive for 74% of intersections. Thus, even without warning, drivers usually slowed down on approaching an intersection. Warnings only increased this tendency.
Direct effects on stopping (Step 2)
For the model with stopping frequency as the dependent variable, warning group and intended DZ were significant predictors. The estimated marginal mean stopping percentages for the OBE, single-pole, flexible-poles, and no-warning groups were 86%, 77%, 75%, and 42%, respectively. Each of these stopping percentages with warning was significantly greater than with no warning. The 2.1-s, 2.75-s and 3.4-s intended DZs had stopping percentages of 33%, 53%, and 73%, respectively. Thus, receiving a warning (vs. none) and receiving the longest intended DZ (vs. the shortest) both increased stopping by a large amount.
Mediated effects on stopping (Step 3)
To test whether anticipatory slowing mediated these large effects on stopping behavior, we simply added DZ extension (the mediator) as a predictor to the Step 2 model. According to Baron and Kenney (1986), if slowing mediates the effects of warning type on stopping, then when slowing is added to the direct Step 2 model, the size of the warning effect will diminish greatly. In the mediation model, DZ extension, χ2(1) = 76.5, p < .001, and intended DZ, χ2(1) = 60.1, p < .001, were significant predictors of stopping; but, importantly, warning group was not significant, χ2(3) = 5.59, p = .13. Furthermore, the size of the warning effect was much reduced relative to the Step 2 model without DZ extension. For the model with DZ extension, estimated marginal mean stopping percentages for the OBE, single-pole, flexible-poles, and no-warning groups were 97%, 94%, 92%, and 88%, respectively; that is, warnings had a relatively small effect on stopping. In contrast, in the model without DZ extension, adding warnings increased stopping by about 40 percentage points over no warning. The mediation explanation for this pattern is that the warning effect diminished so much (and became nonsignificant) when DZ extension was added to the model because anticipatory slowing was the main variable directly affecting stopping, and warnings affected stopping only indirectly by their effect on slowing. A Sobel mediation test confirmed that the indirect effect of warning group on stopping, mediated by DZ extension, was significant (z = 4.04, p < .001).
We also predicted that stopping would increase with DZ length. Figure 4 shows the significant effects of DZ extension and intended DZ on stopping rate in the mediation model. For the 0.10 s in DZ extension experienced by the no-warning group, stopping percentages ranged from 30% to 81% depending on intended DZ. For the average 0.49 s of DZ extension with advanced warning groups, stopping percentage ranged from 91% to 99% depending on intended DZ. Thus, the extra 0.4 s of anticipatory slowing provided by advanced warning had a large effect on stopping.
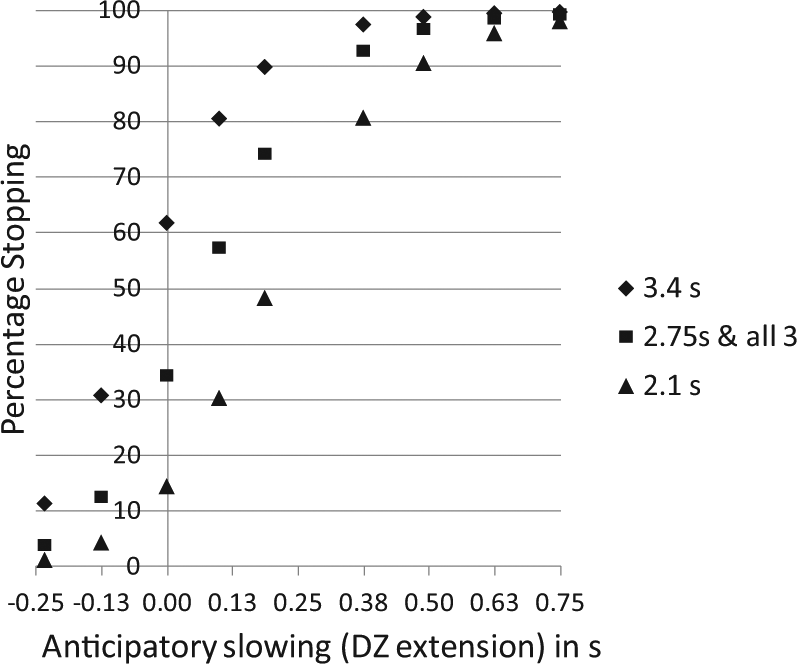
Effect of anticipatory slowing (dilemma zone extension) and intended dilemma zone interval on stopping percentage.
Summary of factors affecting stopping
Figure 5 summarizes the significant mediated and direct effects on stopping percentage along with effect sizes. The effects of intended DZ and DZ extension in the figure are based on the mediation model in which these effects, along with warning group, gender, and age, were tested as predictors of stopping. Thus, these effect sizes are controlled for the other predictors in the model. Warning led to a 0.4-s extension of the DZ relative to no warning due to greater anticipatory slowing, which in turn led to a large increase in stopping of 40 percentage points. A 0.4-s increase in intended DZ led to a 13 percentage point increase in stopping.
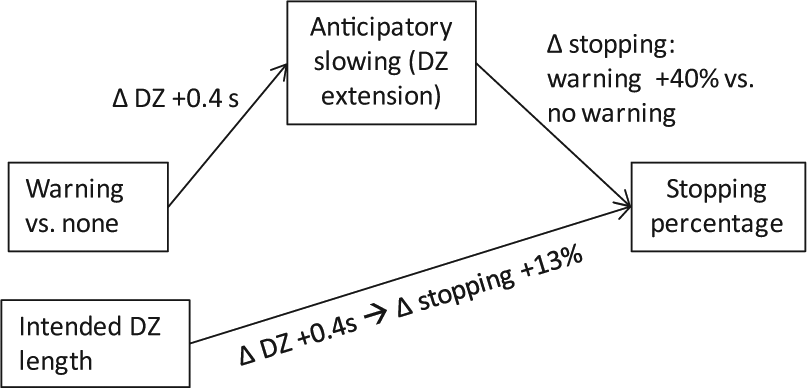
Mediated and unmediated effects on stopping percentage in Study 1.
Predicting stopping with warning lead time
There were two intended warning lead times, 1.5 s and 3.0 s before end of green. As with the intended DZ times, drivers’ anticipatory slowing could extend the intended warning lead times. Since the distribution of actual warning lead times was bimodal and positively skewed, we created a binary variable for warning lead time and set it to have two levels based on the medians of the two actual lead time distributions (1.55 s and 3.15 s for the 1.5 s and 3.0 s intended times, respectively).
In a model with warning lead time (binary), warning group, actual DZ interval, gender, and age as predictors of stopping percentage, warning lead time, χ2(1) = 1.11, p = .29, and warning group, χ2(2) = 1.38, p = .50, were not significant. Actual DZ interval was significant, with the same effects as in previous models. The main conclusion from this and previous models is that warning lead time had little or no effect on stopping percentage; instead, stopping percentage was affected much more by whether or not an advanced warning was used than by the lead time or type of the warning.
Factors predicting deceleration rate
We measured the mean deceleration rate (in m/s2) from the first time drivers depressed the brake more than 5% until velocity reached 0 (Caird et al., 2007) for the 718 noncurve DZ intersections where drivers stopped. Under the assumption that drivers receiving warnings would engage in greater anticipatory slowing, we predicted that warned drivers would exhibit lower deceleration rates than would unwarned drivers. Warning group, F(3, 65) = 29.7, p < .001, and actual DZ, F(1, 700) = 227.9, p < .001, were significant predictors of deceleration rate. The mean deceleration rate for the OBE, single-pole, flexible-poles, and no-warning groups was 2.69 m/s2 (SE = 0.12), 2.66 m/s2 (SE = 0.13), 2.42 m/s2 (SE = 0.13), and 4.16 m/s2 (SE = 0.15), respectively. For each type of warning, deceleration rate was significantly less than with no warning, and the effect sizes for these differences were all large (d > 0.84). None of the three advanced warnings differed significantly from each other (p > .13). Finally, the Warning Group × Actual DZ interaction was significant when added to the model, F(3, 653) = 17.3, p < .001. As Figure 6 shows,as the DZ interval decreased, deceleration rate increased slightly with advanced warning but increased much more in the no-warning group. These rates can be compared to the maximum comfortable deceleration rate of 3.6 m/s2 recommended by the American Association of State Highway and Transportation Officials (Transportation Research Institute of Oregon State University, 1997). For most DZ intervals, the deceleration rates with warning are below the maximum, whereas the rates without warning are above it.
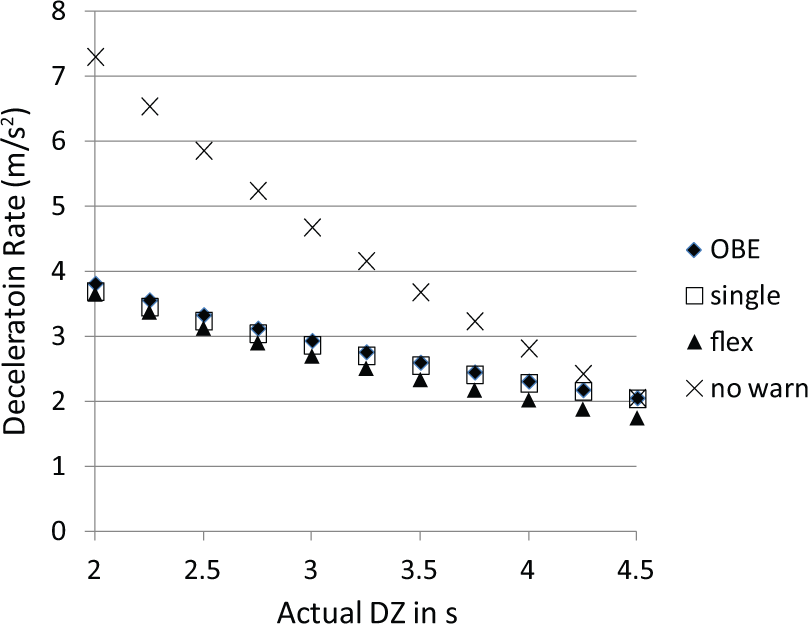
Effect of actual dilemma zone (DZ) and warning group on deceleration rate. At the mean actual DZ of 3.4 s, the deceleration rate standard error was 0.12 m/s2, 0.19 m/s2, 0.12 m/s2, and 0.23 m/s2 for the onboard equipment, single-pole, flexible-poles, and no-warning conditions, respectively.
Speed profiles
The preceding analyses focused on how activated warnings affected drivers inthe DZ. However, warnings could also affect drivers far from the intersection, before they are activated. We tested this possibility by looking at drivers’ speed at three locations: the segment from just past the previous intersection to the speed sensor at 305 m from the stop line, the sensor, and 204 m from the stop line (which was before any warnings occurred). This test was done for 29 noncurve intersections per driver: DZ intersections, green intersections, and intersections with yellow onsets very near the intersection (1.0 s). At these three locations, all 29 intersections showed a green traffic signal, and warnings, if visible, were inactivated.
The dependent variable was velocity. A model using predictors of warning group, road location, gender, and age showed an effect of location, F(1, 6866) = 368.0, p < .001, and a Warning Group × Location interaction, F(3, 6866) = 2.73, p = .04. The estimated marginal means for this interaction are shown in Figure 7. Drivers in all groups (including no warning) slowed across these locations, but the flexible-poles and single-pole groups slowed more across the locations than did the unwarned group. Contrasts showed that the flexible-poles group was slower than the unwarned group at the first location and over all three locations. Thus, some of the warnings, particularly, flexible poles and single pole, caused drivers to slow more than unwarned drivers and to do so well in advance of an intersection, before any warning was visible. Thus they further support the hypothesis that drivers respond to warnings with early anticipatory slowing (Response Pattern 1) and argue against the hypotheses that drivers avoid early slowing (Pattern 2, 3) or ignore warnings altogether (Pattern 4).
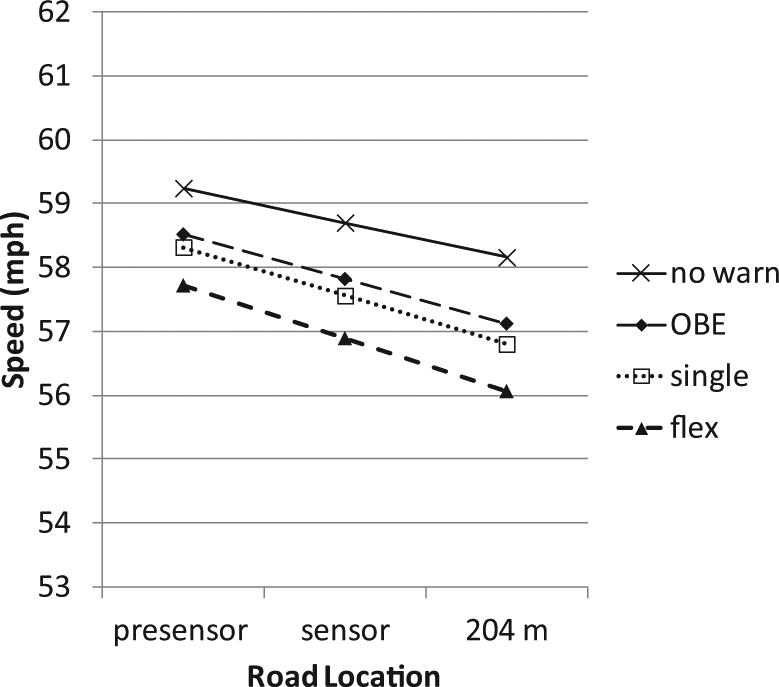
Estimated marginal means showing change in speed across road locations for each warning type at green and yellow intersections. At the sensor location, the speed standard error was 0.63, 0.86, 0.77, and 0.74 mph for the onboard equipment, single-pole, flexible-poles, and no-warning conditions, respectively.
Study 2
In Study 2, we tested three new methods of displaying end-of-green warnings: two warning signs with flashers on the right shoulder, a series of LEDs embedded in the pavement in the center of each lane, and signs with flashing lights above each lane on an overhead bridge. The latter two displays provide lane-specific warnings; for example, if a warning is intended only for a driver in the left lane, only the left-lane warning flashes. In contrast, the right-shoulder warning display is not lane specific; for example, warnings will flash when intended only for a left-lane driver, but this warning might be misinterpreted by nearby right-lane drivers as intended for them. Comparing these warning displays allowed us to investigate the main question of Study 2: whether lane-specific warnings led to safer driving behavior than non-lane-specific warnings. If lane-specific warnings communicate clearer information about the intended target of a warning than non-lane-specific warnings, then the former warnings should lead to safer behavior in situations when the target vehicle of a warning message is in doubt. Another aim of Study 2 was to attempt to replicate the findings of Study 1 regarding factors affecting driver behavior in the DZ.
In Study 1, drivers were required to stay in the right lane, all the end-of-green warnings were intended for the driver, and there were no traffic cars nearby in either lane during warnings. These constraints made it easy for drivers to understand that any warnings were intended for them. In Study 2, drivers were also required to stay in the right lane. However, we included situations in which a traffic car behind the driver and in the left lane was in the DZ and received a warning that was visible to the driver. These left-lane warnings were not intended for the driver. They were given when the driver was past the DZ and very close to the intersection, so the safest behavior was to pass through the intersection.
Our hypothesis was that lane-specific warnings would make it easier for drivers to understand that these left-lane warnings were not intended for them and thus pass through these intersections. In contrast, we expected that drivers receiving non-lane-specific warnings would stop more frequently for the left-lane warnings. Also, given the drivers’ proximity to the intersection for the left-lane events, any stopping at left-lane warning events was expected to show a high deceleration rate. Other than the left-lane events, the overall design of Study 2 was similar to Study 1.
Method
Design
This experiment had a between-subjects factor, advanced warning group (double pole, pavement, overhead, no warning), and two within-subjects factors, intended DZ duration (2.1 s, 2.75 s, or 3.4 s) and intended advanced warning lead time (1.5 s or 3.0 s).
Participants
The 83 participants were recruited from the Clemson, South Carolina, area and were prescreened as in Study 1. During the study, 12 participants were dropped because they exhibited high motion sickness scores and 3 because of experimenter or simulator errors. The remaining 68 participants were randomly assigned to each of the four warning conditions, such that each condition had an approximately equal number of older and younger participants and males and females. Table 2 shows gender, age, and caution data for each warning type. Age and caution did not differ significantly by warning type (Fs < 1). However, because of the slight imbalance in gender and caution across warning conditions, gender and caution, as well as age, were used as predictors in all models. Participants were compensated $20 for completing the study.
Gender, Age, and Caution Data by Warning Condition for Study 2
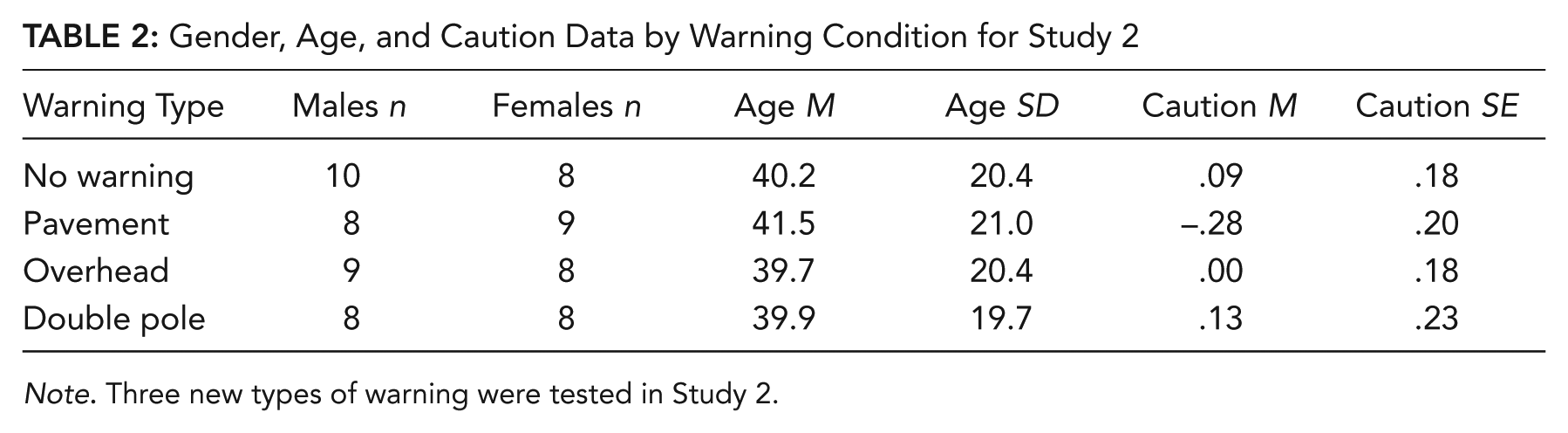
Note. Three new types of warning were tested in Study 2.
Materials and tasks
The materials and driving tasks were the same as in Study 1, except that instead of the 16 DZ intersections in Study 1, Study 2 had 10 DZ intersections and six left-lane events. In the left-lane events, the yellow phase onset began when the driver was 1.45 s from the stop line (past the driver’s DZ) and a traffic car in the left lane was about 0.65 s behind the driver (in its DZ), a warning was activated 1.5 s before end of green for the warning groups, and the pavement and overhead warnings were given only in the left lane because the driver (in the right lane) was past the DZ. This design simulated a situation in which the warning is intended for the left-lane car, not the driver. However, all three warning types activated when the drivers were still able to see the start of the warning.
Pavement (Figure 8): This system simulated a series of 12 LED displays (yellow when activated) embedded in the pavement in the center of each lane. The spacing and timing of these displays was the same as for the flexible-poles warnings in Study 1.
Overhead (Figure 9): An overhead bridge spanning both lanes was located 131.2 ft (40 m) from the stop line. Centered above each lane, at a height of 20.5 ft (6.3 m), was a sign reading “GREEN ENDING IF FLASHING.” Each sign had yellow lights to its right and left. When activated, these lights flashed with the same timing as the single-pole warnings of Study 1.
Double pole: This warning used the same pole-mounted sign and flashing lights as in the single-pole warnings of Study 1 (Figure 2). One pole was located 131.2 ft (40.0 m) from the stop line, as in Study 1. The second pole was located 300.0 ft (91.4 m) from the stop line. During a warning, the pole farthest from the intersection flashed if that pole was visible ahead of the driver; otherwise the pole nearest to the intersection flashed.

Pavement lights flashing an advanced warning in right lane (actual display was in color).

Overhead sign flashing an advanced warning in right lane (actual display was in color).
Procedure
The procedure was the same as Study 1.
Results and Discussion
Effects of lane-specific versus right-shoulder warnings
For the left-lane events, the driver was about 1.5 s from the stop line when the traffic signal changed to yellow (see Table 3). This location is past the DZ, so the safe behavior was to go through the intersection. Table 3 shows that drivers in the no-warning condition never stopped in this situation, as expected. However, since drivers in the three warning groups saw a warning about 1.5 s before the yellow onset (about 3 s from the stop line), some of them stopped. Drivers in the two lane-specific warning conditions stopped infrequently, 4% for pavement and 7% for overhead; but drivers receiving the non-lane-specific double-pole warning stopped more often, 18% of the time. A model predicting stopping percentage with warning type (three levels), gender, age, and caution tested the hypothesis that lane-specific warnings (pavement or overhead) would lead to less stopping than right-shoulder warnings (double pole). Pavement warnings had significantly less stopping than double pole, χ2(1) = 4.77, p = .03, but overhead warnings were not significantly different from double pole, χ2(1) = 2.22, p = .14.
Actual Dilemma Zone (DZ) and Driving Behavior at the Left-Lane Intersections
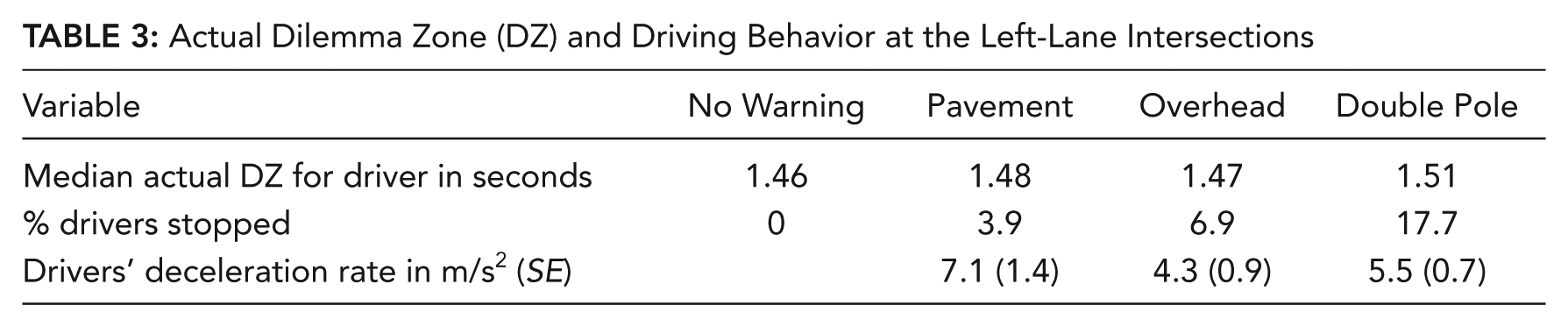
Table 3 shows that when drivers did stop at these left-lane events, their deceleration rates were above the 3.6 m/s2 maximum deceleration recommended by safety officials. Thus, these were sudden decelerations, as expected given the proximity to the intersection. These findings supported the conclusion that non-lane-specific warnings intended for other vehicles may be misinterpreted by drivers as intended for them, thus leading to excessive numbers of sudden stops, whereas lane-specific warnings (especially the pavement condition) reduced the number of sudden stops.
Effects of warnings at DZ intersections
In these analyses, we attempted to replicate the finding from Study 1 regarding driver behavior at DZ intersections; thus, they excluded the left-lane intersections where the driver was not in the DZ. We ran the same three models (Step 1, 2, 3) as in Study 1, always including age, gender, and caution as predictors. The effect sizes and significance levels for warning group, DZ extension, and intended DZ replicated Study 1 closely, and Study 2 replicated the finding that anticipatory slowing mediated the effects of warning on stopping (Figure 10).
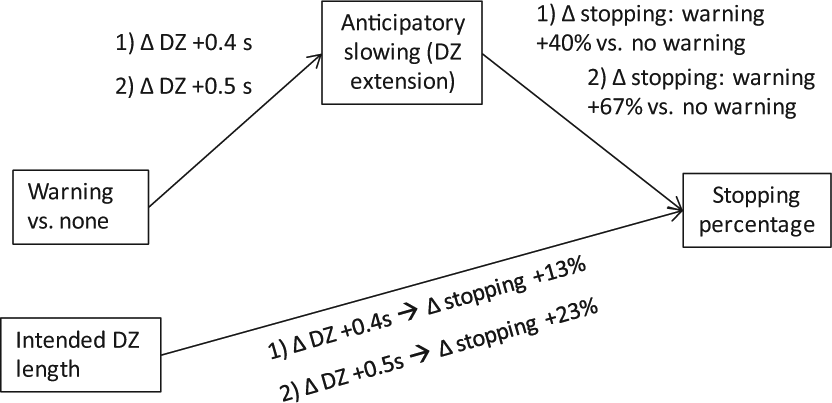
Mediated and unmediated effects on stopping percentage in Study 1 and 2.
Study 2 also replicated the Study 1 findings regarding deceleration rate when drivers stopped at DZ intersections. For each warning system, deceleration rate was significantly less than with no warning. The mean deceleration rate for the pavement, overhead, double-pole, and no-warning groups was 2.77 m/s2 (SE = 0.22), 2.46 m/s2 (SE = 0.20), 2.63 m/s2 (SE = 0.21), and 3.85 m/s2 (SE = 0.26), respectively.
Final Discussion
A major factor making driving difficult is hazards that are sudden and hard to predict, for example, a potential collision or a DZ signal change. Automation may help drivers handle these hazards by predicting their occurrence and providing advanced warning to the driver. The goal of the current studies was to determine whether advanced warnings of the end of the green traffic signal phase help drivers handle the DZ more safely. These studies may provide guidance to human factors researchers regarding performance models of how drivers use end-of-green (and perhaps other) warnings, control algorithms and warning displays for intelligent intersections, and statistical methodology in human factors research.
These benefits depend on overcoming some of the limitations of these simulator experiments. Simulator studies do not recreate the physical risks of on-road driving. In experiments, participants may not feel the time incentives of on-road driving, may drive more safely because of being observed, and may be more attentive because of the novelty of the safety intervention or because hazards occur relatively often. However, the fact that our unwarned drivers responded to the DZ like on-road drivers (i.e., near 50% stopping at the center of the DZ) suggests that our drivers may have responded similarly to when they are on the road. Nevertheless, the results of the current studies are applicable only to drivers’ initial, short-term exposure to end-of-green warnings. Further research is needed before generalizing beyond this. Also, simulator experiments should be compared with the results of field studies before drawing firm conclusions. Some evidence for generalizing from simulator experiments comes from a study by Reed and Green (1999). They compared drivers who drove the same scenario in a simulator versus on road and found the same pattern of significant effects in both settings.
Performance Models for End-of-Green Warnings
Research suggests that when drivers experience a new safety intervention, they sometimes respond to and use this intervention in ways that increase their safety (McKenna, 1988) and sometimes respond with behavioral adaptations that tend to undo the safety benefits of the intervention. For example, drivers using adaptive cruise control and antilock brakes exhibited shorter following distances and higher speeds than those without the safety intervention (Hoedemaeker & Brookhuis, 1998; Sagberg, Fosser, & Saetermo, 1997). Prior research suggested a number of possible safe and unsafe ways that drivers could respond to end-of-green warnings. Drivers could slow well in advance of the intersection, even before a warning, that is, they could engage in anticipatory slowing (Pattern 1). Alternatively, they could not do anticipatory slowing and wait until they were nearer the intersection, where they could either maintain speed after seeing an inactivated warning (Pattern 2) or speed up after seeing an activated warning (Pattern 3). Finally, drivers could ignore warnings altogether (Pattern 4).
Studies 1 and 2, which used two independent samples totaling 148 participants representing both genders and a wide age range, provided evidence that for drivers facing the DZ, increased anticipatory slowing mediated the effect of warnings on stopping. Increased anticipatory slowing by warned drivers extended their DZ by about 0.4 s relative to unwarned drivers, which caused warned drivers to stop much more frequently than unwarned drivers. Thus, the primary behavioral mechanism by which warnings affected stopping was drivers’ anticipatory slowing (Pattern 1). Furthermore, the more frequent stops with warning were also safer, as warned drivers had significantly lower deceleration rates when stopping than unwarned drivers. These findings are inconsistent with the other hypothesized patterns of responding to warnings (maintaining or increasing speed after warnings, ignoring warnings).
The speed profile data in Study 1 showed that warnings did not just affect driver behavior at intersections where activated. Instead, warnings led to a general pattern of slowing far (300 m) from the intersection where the signal remained green and warning displays were not visible. This finding provides further evidence that drivers responded to warnings by anticipatory slowing and not by maintaining or increasing speed. It also suggests that warnings created a more cautious mental set that lasted beyond single intersections. This possibility is important as it means that end-of-green warnings (and perhaps other warnings) may affect driver behavior beyond the time when the warning is visible.
Our findings are consistent with the findings of safer driver behavior with intelligent end-of-green warnings in the Caird et al. (2008) simulator study and, importantly, the Messer et al. (2004) field study from two high-speed intersections. Furthermore, some of our warning effects are similar to effects found in a simulator experiment investigating collision warnings. Lee, McGehee, Brown, and Reyes (2002) found that drivers who were warned about a lead car deceleration began slowing more quickly and had more gradual decelerations and fewer collisions than unwarned drivers. This parallels our findings that warned drivers showed more anticipatory slowing, more gradual decelerations, and more stopping than did unwarned drivers. In both of these studies, warnings led drivers to give a quicker but lower-magnitude slowing response. These similarities suggest that researchers may begin to find general patterns by which different types of advanced warnings affect driving behavior.
Improving Displays and Control Systems for Intelligent Intersections
The current studies documented large effects of warnings given much shorter lead times, 1.5 to 3 s before end of green, than in prior research, that is, the 5- to 12-s lead times in Caird et al. (2008), Messer et al. (2004), and Pant and Huang (1992). Designers of control systems for intelligent intersections may benefit from knowing that warnings presented only 1.5 s before end of green seem to improve driving safety. Also, designers may benefit from knowing that the very different displays in Study 1—a single tall pole, a series of short poles, in-vehicle display—all led to large and approximately equal safety benefits, whereas the lane-specific warnings in Study 2 showed some safety benefits compared to non-lane-specific warnings on the right shoulder.
Methodological Benefits
The mediation analysis used here offers the potential for human factors researchers to provide a clearer and richer understanding of the causal relationships among interventions, intermediary process variables, and outcome variables. This research may lead to more accurate and useful performance models.
Conclusion
When faced with yellow traffic signal onsets in the DZ, drivers who had received advanced warnings rarely exhibited unsafe behavior, such as speeding up. Instead, warned drivers exhibited greater anticipatory slowing well before the intersection and the warning, when compared with unwarned drivers. This greater slowing caused warned drivers to stop more frequently and more safely than unwarned drivers. These warning benefits were shown for a variety of warning displays; although in one situation, lane-specific displays showed an advantage over roadside displays.
Key Points
We tested intelligent advanced warnings to help drivers negotiate the dilemma zone.
Warnings increased anticipatory slowing on intersection approach, which then increased stopping at the intersection.
Warnings decreased deceleration rates when stopping.
Warning effects on slowing generalized to intersections where no warnings were given.
Lane-specific warnings may have some benefits over roadside warnings.
Footnotes
Acknowledgements
Work presented in this paper was supported by DOT Phase II SBIR Contract No. DTRT57-10-C-10073 awarded to Intelligent Automation, Inc. We thank Michael Adams, Natalee Cartee, Rebecca Cook, John Jay Jacobs, and Sarah Reddy for assistance in data collection and analysis.
Author(s) Note:
The author(s) of this article are U.S. government employees and created the article within the scope of their employment. As a work of the U.S. federal government, the content of the article is in the public domain.
Leo Gugerty is a professor of psychology at Clemson University. He obtained his PhD in experimental psychology from the University of Michigan in 1989.
Scott E. McIntyre is a senior lecturer at Arizona State University, Lake Havasu City. He obtained his PhD in human factors psychology from Clemson University in 2012.
Drew Link is a PhD student in human factors psychology at Clemson University. He obtained his MS in human factors psychology from Clemson University in 2013.
Karl Zimmerman was an associate professor of civil engineering at Valparaiso University during this study. He obtained his PhD in civil engineering from Texas A&M University in 2003.
Devendra Tolani is a program manager/lead scientist at Intelligent Automation, Inc. He obtained his PhD in mechanical engineering from Penn State University in 2005.
Peter Huang is a highway research engineer at the Federal Highway Administration. He obtained his PhD in transportation engineering in 1993.
Robert A. Pokorny is a principal scientist at Intelligent Automation, Inc. He obtained his PhD in experimental psychology from University of Oregon in 1985.