
Abstract
Objective
To investigate the effects of human force anticipation, we conducted an experimental load-pushing task with diverse combinations of informed and actual loading weights.
Background
Human motor control tends to rely upon the anticipated workload to plan the force to exert, particularly in fast tasks such as pushing objects in less than 1 s. The motion and force responses in such tasks may depend on the anticipated resistive forces, based on a learning process.
Method
Pushing performances of 135 trials were obtained from 9 participants. We varied the workload by changing the masses from 0.2 to 5 kg. To influence anticipation, participants were shown a display of the workload that was either correct or incorrect. We collected the motion and force data, as well as electromyography (EMG) signals from the actively used muscle groups.
Results
Overanticipation produced overshoot performances in more than 80% of trials. Lighter actual workloads were also associated with overshoot. Pushing behaviors with heavier workloads could be classified into feedforward-dominant and feedback-dominant responses based on the timing of force, motion, and EMG responses. In addition, we found that the preceding trial condition affected the performance of the subsequent trial.
Conclusion
Our results show that the first peak of the pushing force increases consistently with anticipatory workload.
Application
This study improves our understanding of human motion control and can be applied to situations such as simulating interactions between drivers and assistive systems in intelligent vehicles.
Keywords
Introduction
Human motor control studies suggest that humans utilize both anticipatory and compensatory strategies to achieve fast, adaptive, and stable motion in the presence of external disturbances (Woodworth, 1899). However, humans may utilize feedforward-dominant control more to achieve tasks with short time durations in urgent situations such as collision avoidance or acute decision making. To better understand acute human motions, previous research has demonstrated the existence of anticipatory behavior. For example, in hitting sports (e.g., tennis, baseball), expert players rely on accurate action timing and anticipation to reduce response delays, thereby enabling fast and agile maneuvers (Müller & Abernethy, 2012; Schmidt, 1968).
The need for evaluating ergonomics design necessitates an appropriate framework that integrates both feedforward and feedback controllers, to realistically simulate human force and motion response within a given environment. Humans have multiple sensory inputs. Proprioceptive senses can detect the position and movement of the limbs, as well as provide information regarding effort and force produced (Proske & Gandevia, 2012). Anticipatory strategies rely, in part, on internal models (Kawato, 1999; Wolpert et al., 1995) that are developed based on sensorimotor memory systems (Johansson & Cole, 1992). These internal models enable fast responses by reducing the effects of sensorimotor delays. In contrast, compensatory strategies operate using sensory feedback loops to enable corrective responses and adaptability to disturbances (Desmurget & Grafton, 2000). Human motion control is usually considered to be a feedforward controller that is developed as a result of iterative learning (Chen et al., 2019).
Feedback control strategies have been studied in many contexts. For example, in regular activities of daily living, such as object manipulation, humans generally adjust their grip force in anticipation of an external disturbance in order to prevent the object from slipping out of their hands (Johansson & Cole, 1992; Nowak et al., 2013). In reach-to-grasp motions, the hand posture is adjusted to the shape of the grasped object in anticipation of the grasping phase (Schettino et al., 2003). Size–weight illusion experiments are also well-recognized methods to understand the effect of conflicting visual and haptic information (Brayanov & Smith, 2010; Flanagan & Beltzner, 2000). Previous studies on force anticipation have been limited to grip-load or lifting force scenarios (Diedrichsen et al., 2003; Jenmalm et al., 2006; Nowak et al., 2013). While these studies have provided important information, they are not suitable to study feedforward-dominant motions, which include possible overshoot. This is because grasping manipulation requires a combination of acceleration and deceleration during a reaching task. In contrast, a pushing task does not necessarily require deceleration of the hand, prior to contacting the object. Force anticipation during pushing-only tasks may be more relevant to driving (e.g., pressing on the brake pedal) and many types of work environments.
The purpose of this study was to investigate the characteristics and effects of anticipatory behavior when humans interacted with objects under load uncertainty. We assumed that both feedforward and feedback control could alter the performance and accuracy of simple pushing tasks. To understand the effects of anticipatory behavior and feedforward-dominant controls, we developed a test instrument that allowed for performance overshoot. These results may provide a better understanding of how internal models influence human motion.
Related Work
Anticipation in Human Motor Control
The existence of anticipatory behavior in human motion suggests that predictive models play a crucial role in human motor control. Several studies have examined the nature and effects of this anticipatory behavior in a variety of scenarios. Serrien et al. (1999) recorded motion, grip, and load forces as subjects performed a task to pull open a drawer using precision grip on the handle. They observed a proactive increase in the grip force as the drawer approached the mechanical stop and concluded that this anticipatory behavior occurred to avoid slipping of the handle due to the emergent impact force. Other studies have also observed similar behavior (see Nowak et al., 2013, for a review).
In manipulation tasks involving lifting objects of different weights, several experiments have demonstrated that humans predictively scale their lift-grip force according to their expectation of the object’s weight (Jenmalm et al., 2006; Johansson & Flanagan, 2009; Johansson & Westling, 1988). The expected object weight may derive from internal models built for the object based on its mechanical properties or prior experience (Gordon et al., 1993).
Our research efforts extend this work to investigate the effect of force anticipation during manipulation scenarios during which subjects may incorrectly anticipate the required force to push loads of various weights.
Controllers for High-Fidelity Human Models
The development of motion controllers that enable the articulation of rich, complex, and versatile human-like motion in human models or humanoid robots is the focus of numerous research efforts (see Kulić et al., 2016, for a review). Such controllers are of interest to researchers in computer animation, biomechanics, robotics, and others.
Some studies have derived inspiration from our understanding of the human motor control system to design controllers such as central pattern generators for locomotion control (Taga et al., 1991) or muscle synergy-based control for complex manipulation (Todorov, 2009). Others have relied on control theory to achieve stable whole-body movement for locomotion based on zero-moment point (Vukobratović & Borovac, 2004), hybrid zero dynamics (Westervelt et al., 2003), and complex manipulation (Kimpara et al., 2019).
While the above examples have enabled the rendering of human-like motion in limited tasks, it is still unclear how to formulate control techniques that can stably render fast and agile motions, as is characteristic of human behavior. We believe that a better understanding of the feedforward and feedback control mechanisms in the human motor control system would facilitate controller designs for human-assistive devices. Specifically, understanding how force anticipation enables fast and prompt motion and force response in humans would inform the synthesis of fast response motion controllers.
Experiment
Ethical Approval
The experimental protocol was approved by the Worcester Polytechnic Institute Institutional Review Board. Experimenters who passed a training course on human subjects research completed this study in line with the Declaration of Helsinki. Written informed consent was obtained from each participant before the experiment.
Participants
Nine healthy males and one female participated in the study (age 25.8 ± 2.5 years; height 172.5 ± 5.3 cm; mass 70.6 ± 12.2 kg). Participants with limited upper limb function due to injury, preexisting condition, or disease were excluded from this experiment. Data from one male participant who did not perform the tasks within the specified time period (described next) were excluded from the analysis.
Experiment Setup and Task
Figure 1 illustrates our experimental setup, which was adjustable to participant’s size. Each participant was seated in front of a test-bench, and he/she performed the instructed pushing task using his/her dominant arm. The handling plate contacted the loading plate through a uniaxial load cell (LCM300; FUTEK, CA) that was attached to the loading plate. As the handling plate was pushed against the loading plate during the task, the pushing force was measured as the contact force by the load cell. During the task, the participant pushed the handling plate directly, to move both plates forward along low-friction linear sliders (SRS15GMU; THK, Japan) until it contacted rubber stoppers. The initial positions of the handling and loading plates were set with rubber stoppers on the test-bench. To set the workload of a given pushing trial, the loading plate was connected to various weights through a wire cable mounted on a fixed pulley. The workloads and corresponding weights were selected to be evenly distributed along a log10 scale and included Heavy (5 = 100.699 kg), Medium (1 = 100.0 kg), and Light (0.2 = 10−0.699 kg) masses. A black curtain was set up such that the participants could not see the weights attached to the loading plate. The low-friction linear sliders allowed the handling plate to slide freely. The handling plate was separated from the loading plate so that if a participant pushed too hard due to an anticipation of Heavy workload, the displacement overshoot of the loading plate could not be corrected. In other words, the loading plate could only be pushed, and the outcome of the loading plate displacement did not include the case of undershooting.
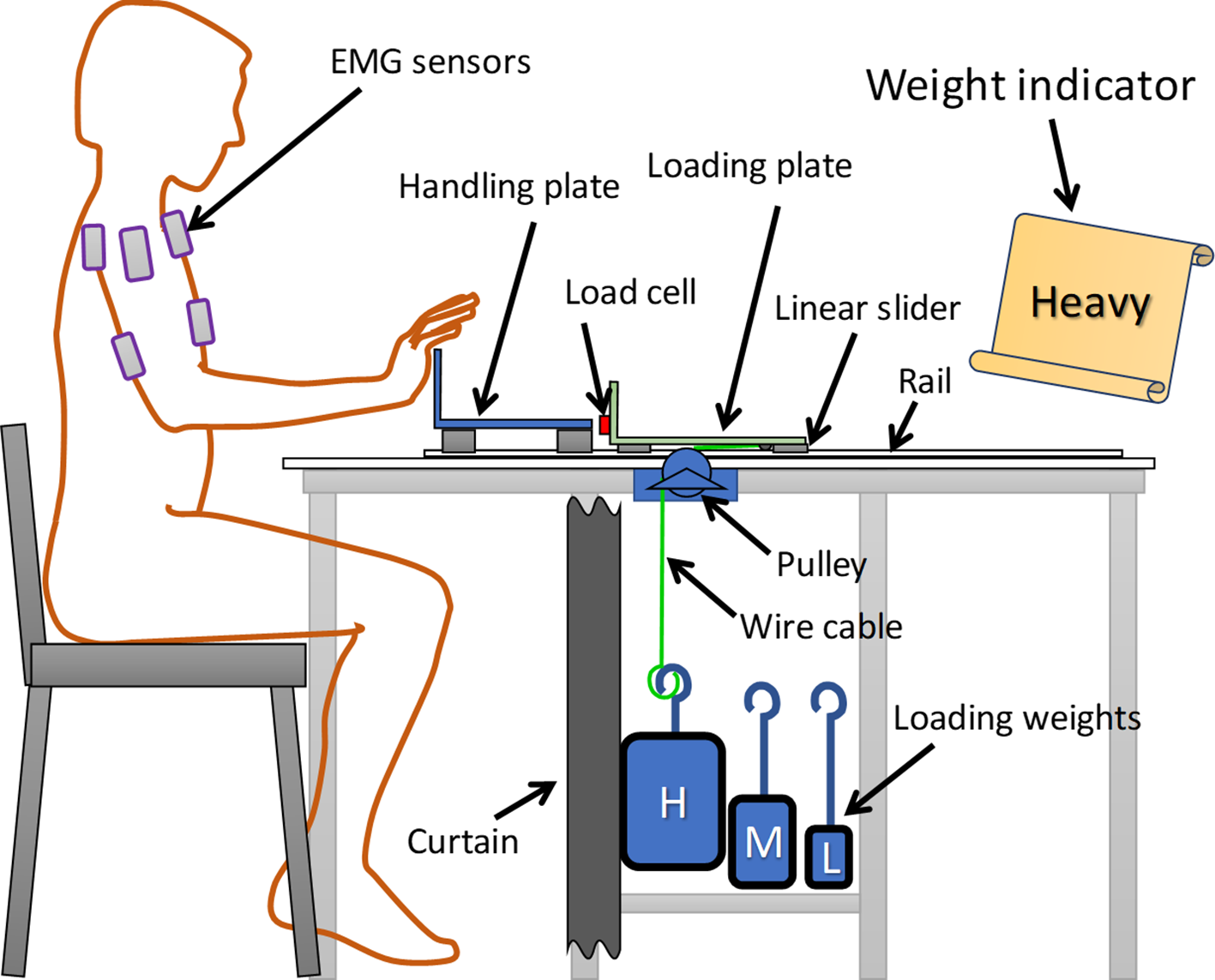
Experimental configurations of pushing task with a test-bench.
Procedure
Each participant performed the pushing task in one training session (14 trials × 3 workload conditions = 42 trials), one checking session (2 trials × 3 workload conditions = 6 trials), and one testing session (15 trials) in this order. Before each trial, the participant was informed of the workload as Heavy, Medium, or Light, from the board display by the experimenter. A 3-s countdown was provided leading up to each pushing task. When the countdown reached “start,” the participant was asked to immediately push the handling plate with his/her hand, both quickly and accurately. Instructions were to push the handling plate a distance of 10 cm in under 1 s, while keeping the hand in contact with the handling plate. Breaks of 3–5 min were provided to the participant between each session.
The training and checking sessions were designed to calibrate the workload anticipation of the participants. In the training session, a participant performed 14 trials of the pushing task with each workload setup and was informed of the correct workload before each trial. This was designed to familiarize participants with the workloads and to train their corresponding motion and force responses. Next, in the checking session, a participant performed six trials in which the informed workload matched the actual workload. The participant was considered to be “trained” if the task performance for the checking trials was static and consistent: four of six trials for each workload condition were completed within 1 s with errors less than 2 cm in displacement. Additionally, the participant also verbally expressed that they were familiar with each workload. If the participant was unable to complete the checking session with sufficient accuracy, additional training sessions were added until the participant achieved the requirement.
Testing Session
During the testing session, each participant performed 15 trials of the pushing task, during which the informed workload may or may not have matched the actual workload. Although participants were informed that both correct and incorrect information would be provided during the test, they were asked to trust the displayed weight information. The sequence of the actual workload and its matching with the informed workload were both randomized. Overall, the 15 trials included 3 mismatching trials for overanticipation (i.e., the informed workload was heavier than the actual load), and 2 trials for underanticipation.
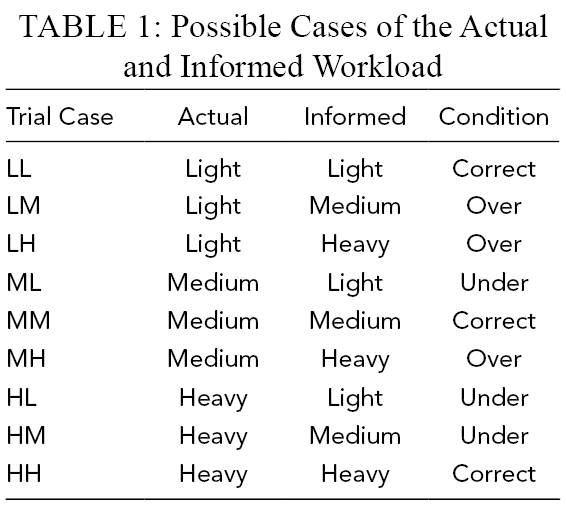
Table 1 displays the nine possible cases of the actual and informed workload setup a participant encountered in the testing session. The trials could be categorized into correct anticipation, underanticipation, and overanticipation. Our experiment required the handling plate displacement from the push to be 10 cm. With reference to this requirement, a trial may fall into the categories of “acceptable,” “overshoot,” and “undershoot.” Specifically, the “maximum displacement” of each trial was normalized with respect to the average displacement in the “MM” trials for each participant. The performance of a trial was “acceptable” if the normalized displacement was within the range of 80%–120%. Displacement above 120% and under 80% was considered to be “overshoot” and “undershoot,” respectively.
Possible Cases of the Actual and Informed Workload
Data Collection
We used wireless surface electromyography (sEMG) sensors to monitor the electrical activities of the relevant muscles. In our setup, 14 channels of Delsys Trigno Avanti EMG sensors (Delsys, MA) were attached to the anterior, middle, and posterior deltoid, biceps, triceps, brachioradialis, and trapezius muscles on both left and right upper extremities. Signals were sampled at 1,111 Hz using Delsys EMGWorks© Acquisition Software (Delsys, MA). The sEMG recordings were normalized by the peak contraction value for each muscle from the maximal voluntary contraction (MVC) test (Boettcher et al., 2008). MVC tests for biceps and triceps were tested with the examiner holding the participant’s wrist to provide resistance, based on methods described by Boettcher et al. (2008). We also used a motion capture system (Vicon Vero, 10 cameras) to track the arm and upper body motions of the participants at 100 Hz. The load cell data (1111 Hz) and sEMG data were synchronized with the motion tracking data.
Data Analysis
All recorded data were analyzed and processed using MATLAB (MathWorks, MA). Raw EMG signals were high-pass filtered at 35 Hz (second-order, zero-lag Butterworth filter), DC offset, rectified, and then low-pass filtered at 40 Hz (second-order, zero-lag Butterworth filter) and resampled at 1,000 Hz (Welch & Ting, 2009). The measured force and handling plate displacement data were resampled at 1,000 Hz and low-pass filtered at 40 Hz (second-order, zero-lag Butterworth filter). Figure 2 shows the synchronized displacement, force, and sEMG data for a single pushing trial from a representative participant. Shown in Figure 2, the anterior deltoid muscle, which is the dominant muscle involved in shoulder elevation motion, was the only muscle that demonstrated an initial burst in EMG signal before the force onset time in the pushing task. EMG signals from other muscles were therefore excluded from our data analysis.
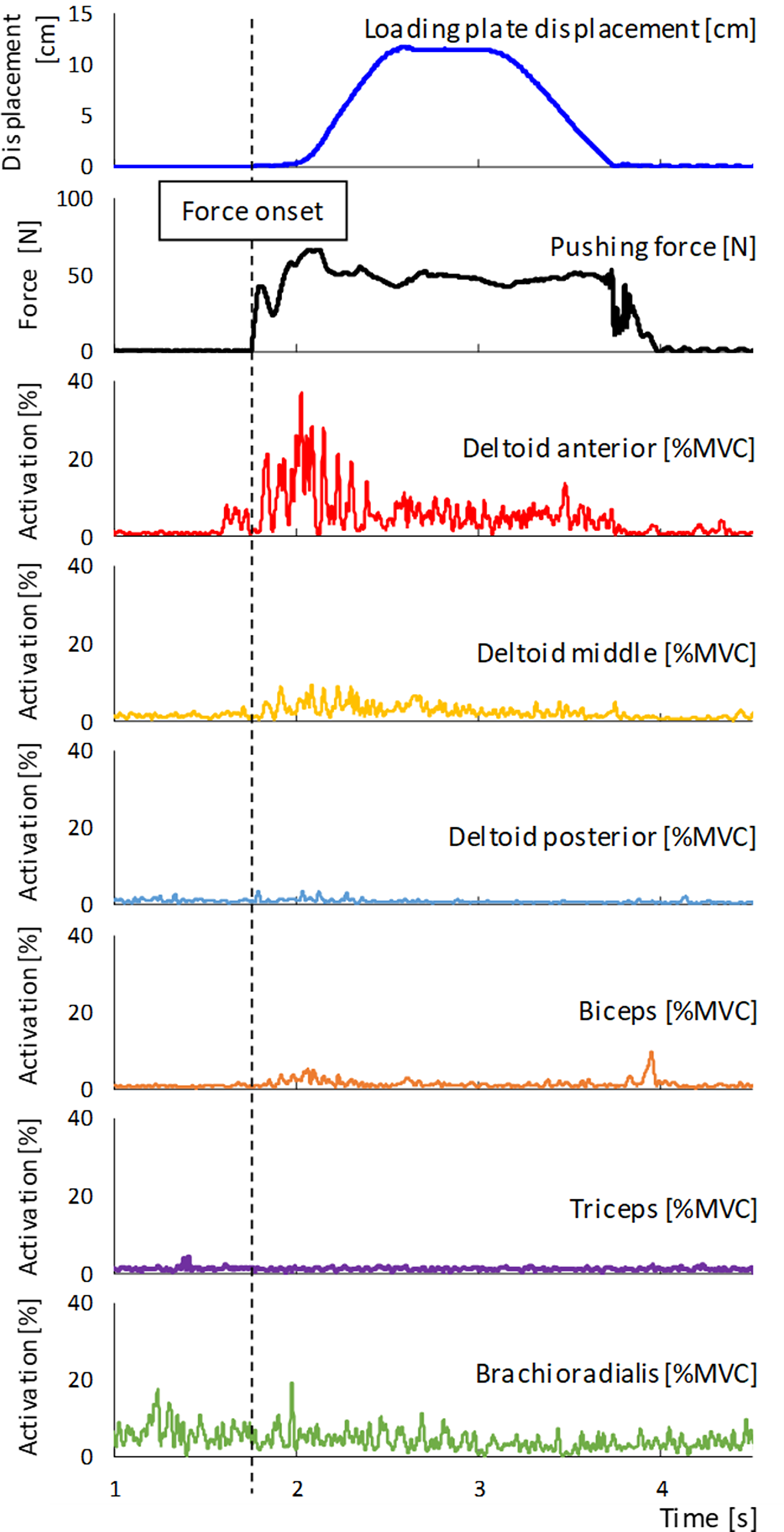
Recorded displacement and force data along with EMG signals from the deltoid (anterior, middle, and posterior), biceps, triceps, and brachioradialis muscles for a single pushing trial.
Figure 3 shows a composite plot of force, displacement, and EMG for a single trial of the pushing task. We determined seven landmark points to identify the features for force anticipation analysis, such as EMG onset, force onset, displacement onset, the first force peak, the minimal point of the first force peak, maximum force, and maximum displacement. Since the EMG onset can be interpreted as the start of actuation, the lead time is expressed as the time interval between EMG onset and displacement onset. Also, the pushing task is completed when the loading plate reaches the maximum displacement. Therefore, task duration is defined as the time interval from EMG onset to the instant of maximum displacement. The force onset time was defined as the first instant the force exceeded 3 N and continuously increased. The first and second peak forces were measured as local maxima occurring after onset. Displacement onset time was defined as the time after force onset, at which the loading plate displaced more than 5 mm from its initial position. To identify EMG onset time, a threshold was set equal to 1.2 times the maximum resting EMG value (from the beginning to 0.3 s prior to the instant of force onset). The EMG onset time was defined as the first instant the EMG signal exceeded this value. Initial velocity of the handling plate was calculated as the average velocity obtained from a displacement between the 5 and 10 mm marks. Our data preprocessing first normalized the EMG signals of a participant with respect to the MVC and the EMG magnitudes recorded in the “MM” trial of each participant (Table 1).
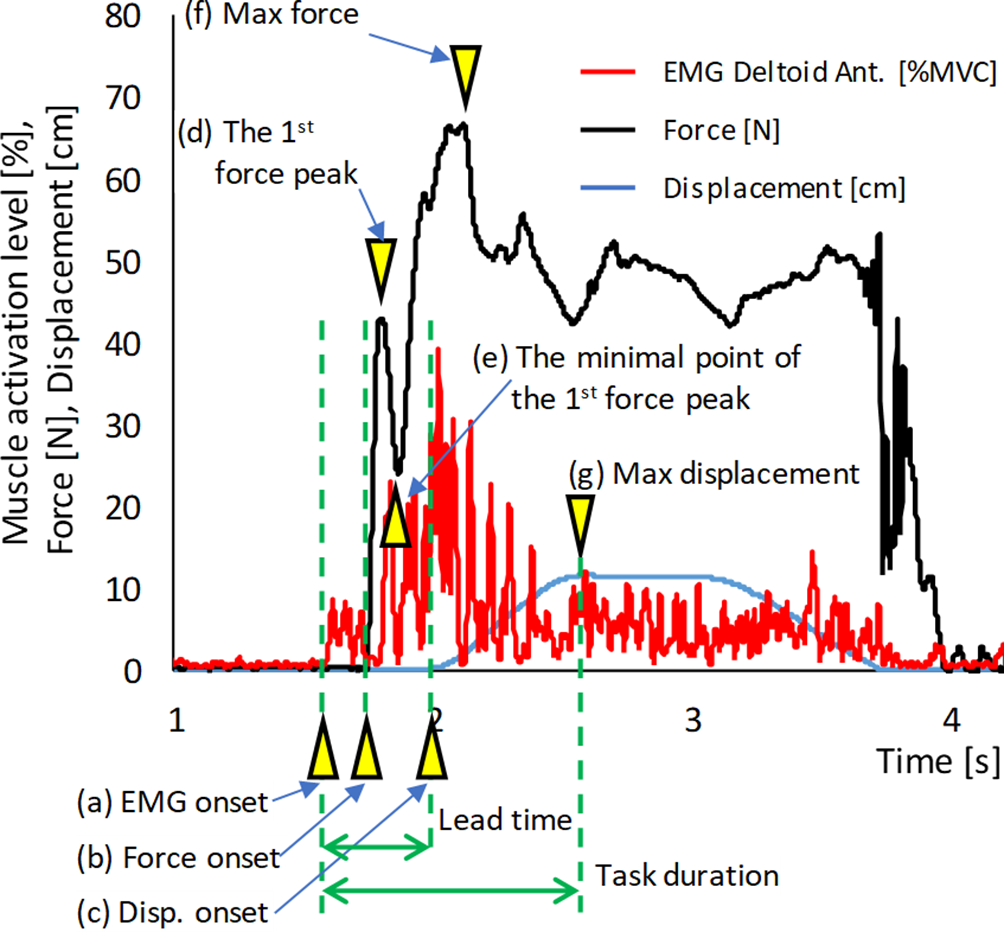
Force, displacement, and EMG data for a single trial, with the features for force anticipation analysis.
Statistical Analysis
The timings of EMG onset, force onset, and displacement onset were used to calculate the time delays. We initially examined the main effects and interactions between actual and informed workload by comparing force and displacement variables using ANOVA and Bonferroni-corrected post hoc t-tests. Next, we defined the feedforward-dominant and feedback-dominant controls based on the relative time delays of force and displacement. To determine whether trials classified as feedforward-dominant were different than those classified as feedback-dominant, we used a Student’s t-test to compare the first peak force, initial velocity, lead time, and task duration. In addition, to determine whether overshoot trials were different than acceptable trials, we used a Student’s t-test to compare the normalized maximum first peak EMG, normalized integrated first peak EMG, first peak force, and initial velocity. Finally, to evaluate the effect of perceived weight from the preceding trial on performance of the current trial, one-way ANOVA was used to compare time delays and pushing performance for HH trials that followed various preceding conditions. Because our sample size was small, we also calculated effect size (Cohen’s d or
Results
In all trials, initial bursts of EMG signals from the anterior deltoid were observed before onset time of force. The force profiles for the Light actual loading weight cases indicated a single force pulse, while the Heavy actual loading weight cases produced multiple force pulses. Figure 4 shows representative trials in the testing session performed by representative participants, including the matching trials for Light, Medium, and Heavy workloads, underanticipation trials, and overanticipation trials.
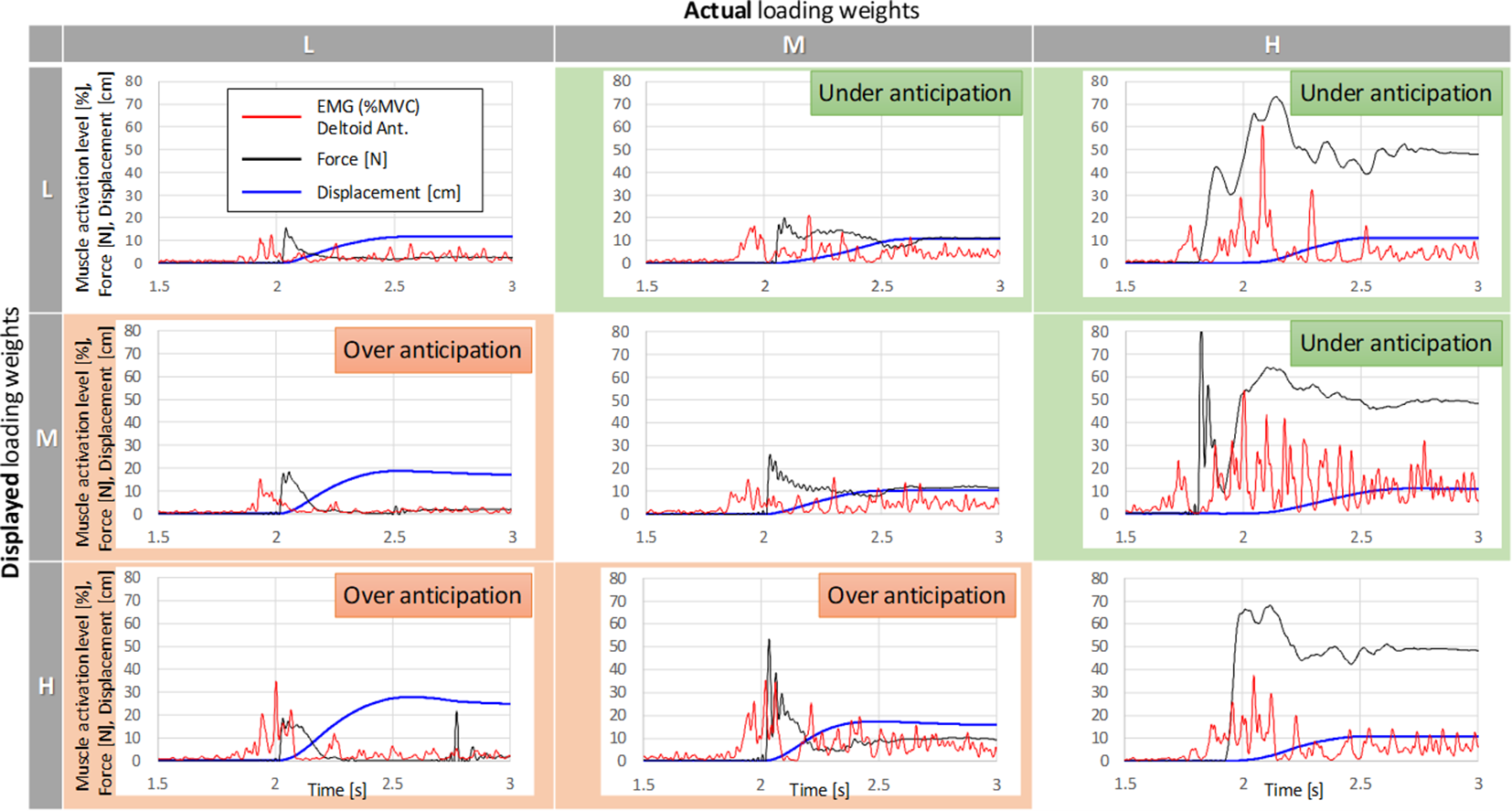
Matrix illustrating the loading labels and respective data plots for all 9 typical trials recorded from a representative participant.
Accuracy of Motion Responses
When the correct information was given to participants, nearly 80% of them were able to accurately hit the target distance of 10 cm, with the remaining 20% overshooting. The distribution was similar for cases of underanticipation (when incorrectly Light workloads were displayed). However, when incorrectly Heavy workloads were displayed (overanticipation trials), approximately 80% participants overshot the target. Due to the design of the task, undershooting was not possible. Figure 5 shows the distribution of participant responses with correct, under-, and overanticipation of task workload by their normalized displacement.
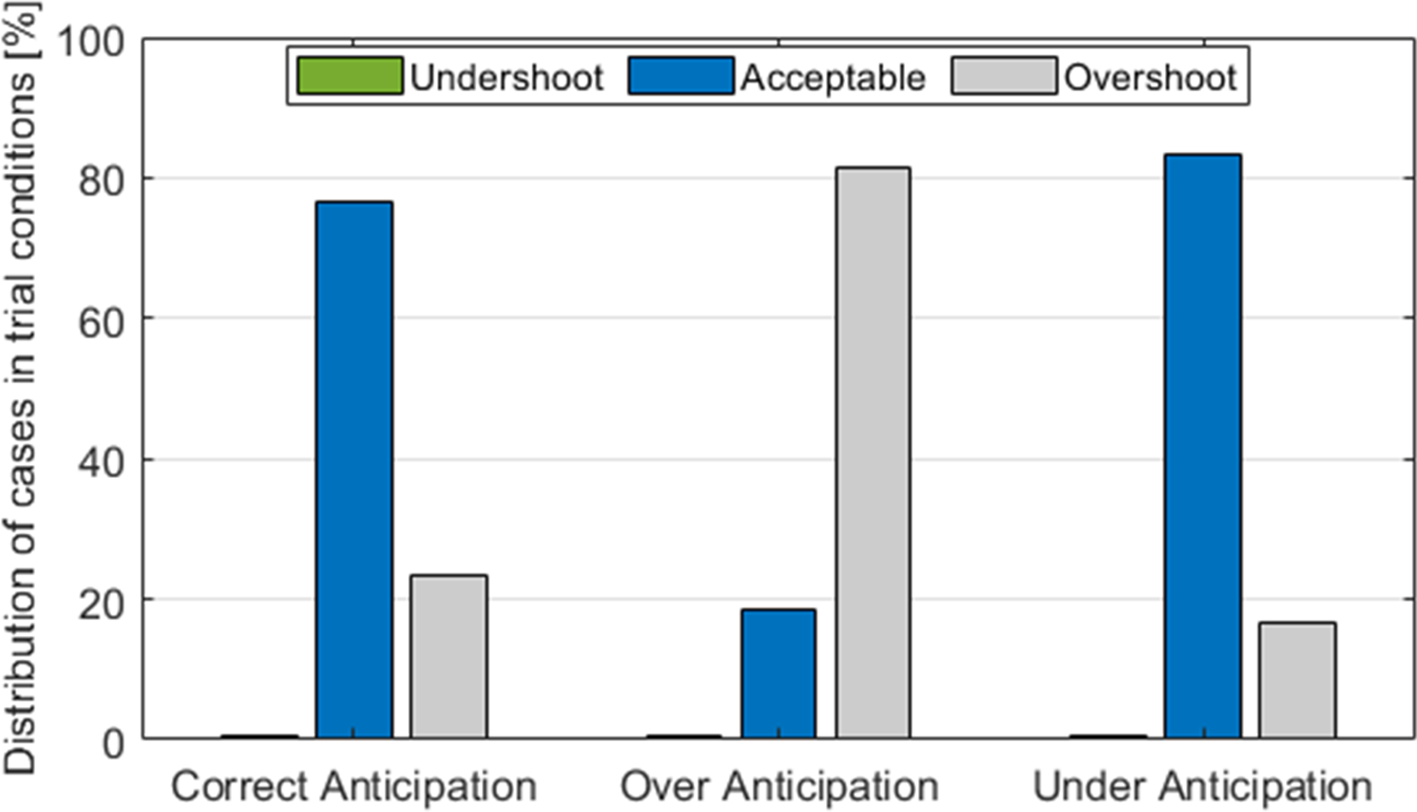
Distribution of displacement response across the three trial conditions: correct, over-, and underanticipation, in percentages.
We observed significant informed/actual workload interactions in displacement, with actual Light and Medium workloads being most affected by informed workload. When the actual workload was Light, the responses with various workload anticipations all had overshoot (see the cases of “LL,” “LM,” and “LH” in Figure 6). And, with Light workloads, the normalized maximum displacement increased with the workload anticipation (p < .001). When the actual workload was Medium, overshoot only occurred with a Heavy anticipated workload, and displacements were different between ML and MM versus MH cases (p ≤ .037). When the actual workload was Heavy, the normalized maximum displacement of all the trials was within the acceptable error range. Light actual workloads had significantly lower first peak forces than Heavy workloads (33.9 (19.7) N vs. 50.0 (41.2) N, p = .04 from post hoc Bonferroni-corrected t-test). The task performance with heavier actual workloads was more consistent than with lighter workloads. Specifically, the standard deviations for HL, HM, HH were ± 9.97, ±14.08, ±17.64, respectively, while the standard deviations for LL, LM, LH is ± 31.15, ±57.35, ±79.49, respectively.
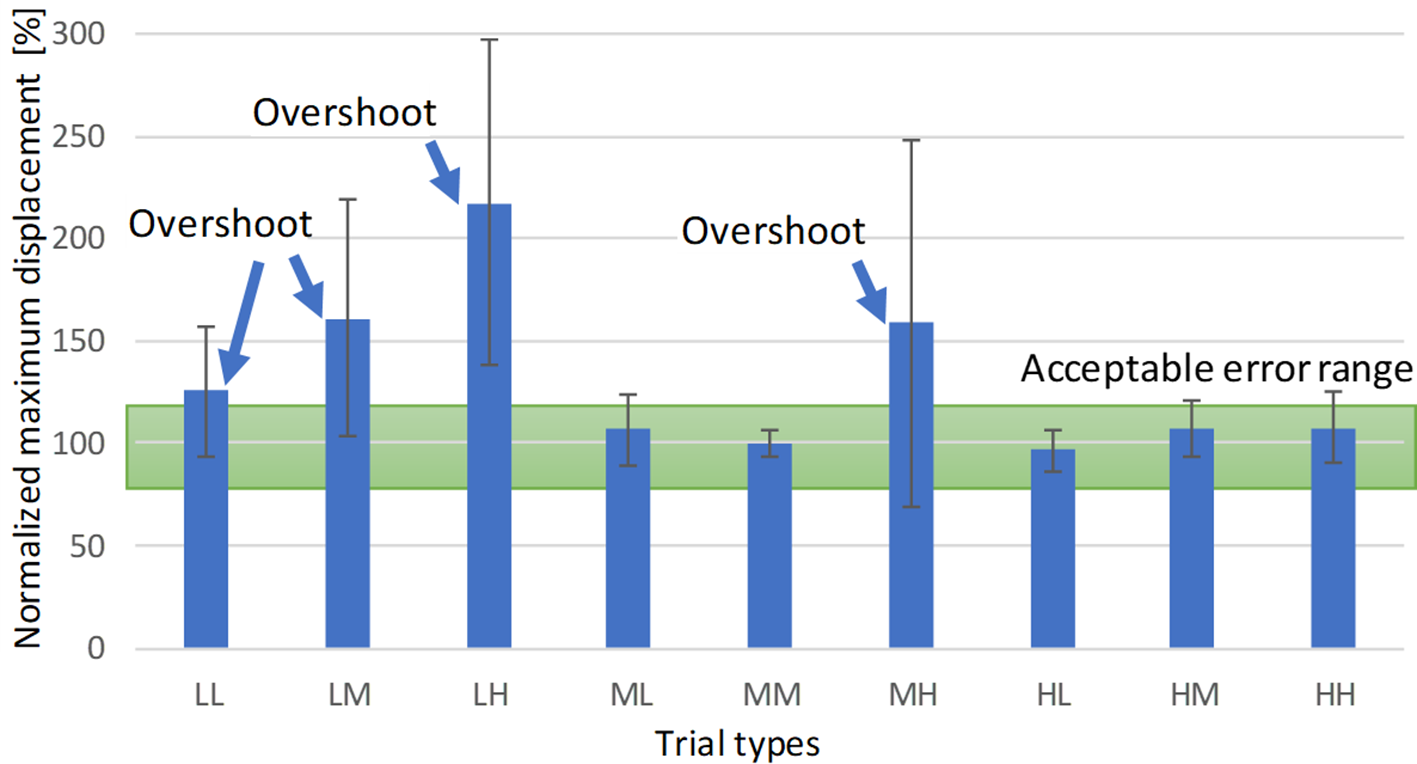
Mean and (error bars) standard deviation of the normalized maximum displacement of the handling plate with a description of the acceptable error range of ±20%.
Effects of Informed Anticipation
The effects of informed workload anticipation can be observed by comparing the first force peak between conditions. In general, the force profiles had a single pulse in the cases of overanticipations (LM, LH, and MH) and two pulses in the cases of underanticipation. Figure 7 shows the mean and standard deviation of the first force peak value of the force profiles across all the participants, for each trial case. Overall, the first peak increased as a function of both the actual and anticipated workload. However, the first force peak was only significantly different between informed conditions within the Light actual workload cases (p = .028,
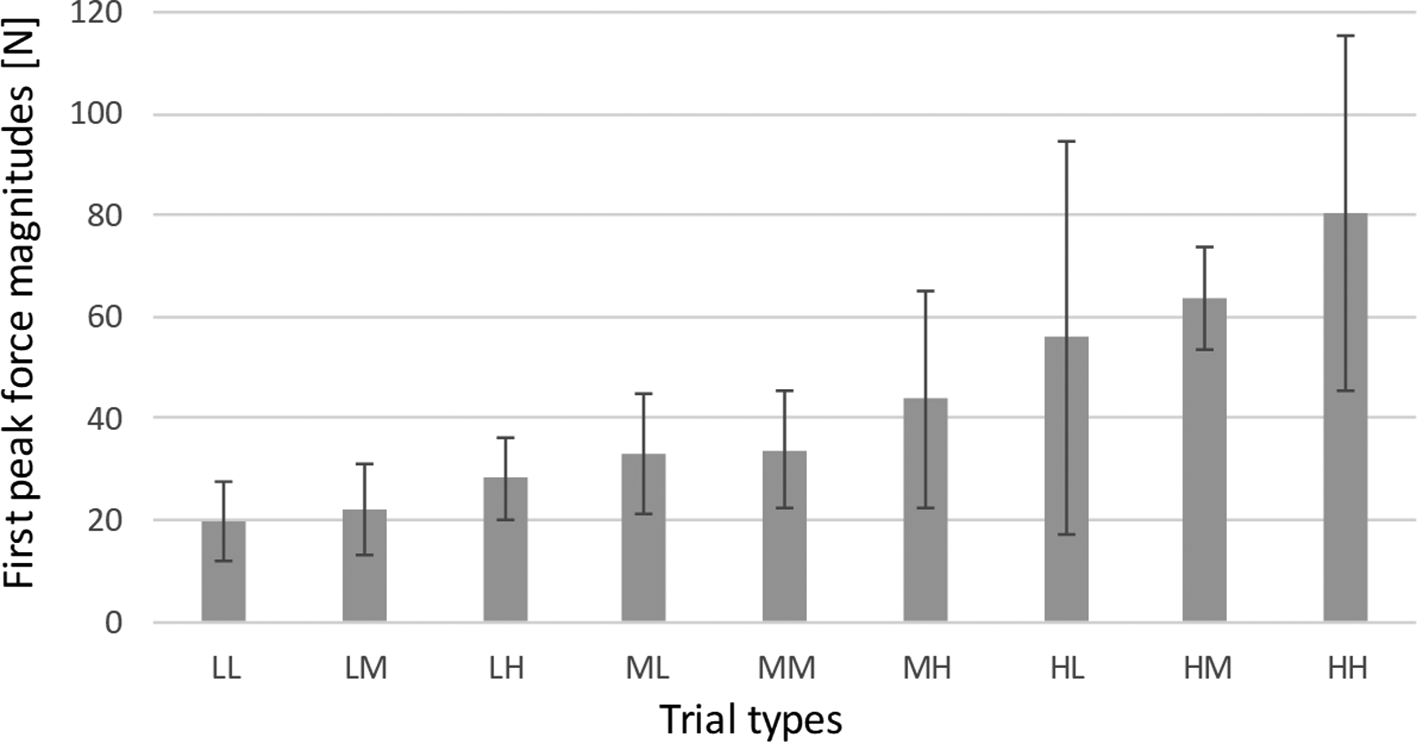
Mean and standard deviation of the first peak force magnitudes across all nine trial cases.
The effects of the informed workload anticipation were also reflected in the initial velocity of loading plate and task durations. Figure 8 compares initial velocities among different informed and actual workloads. Significant differences in initial velocity due to informed workload magnitudes were only observed in Light actual workload cases (p = .046,
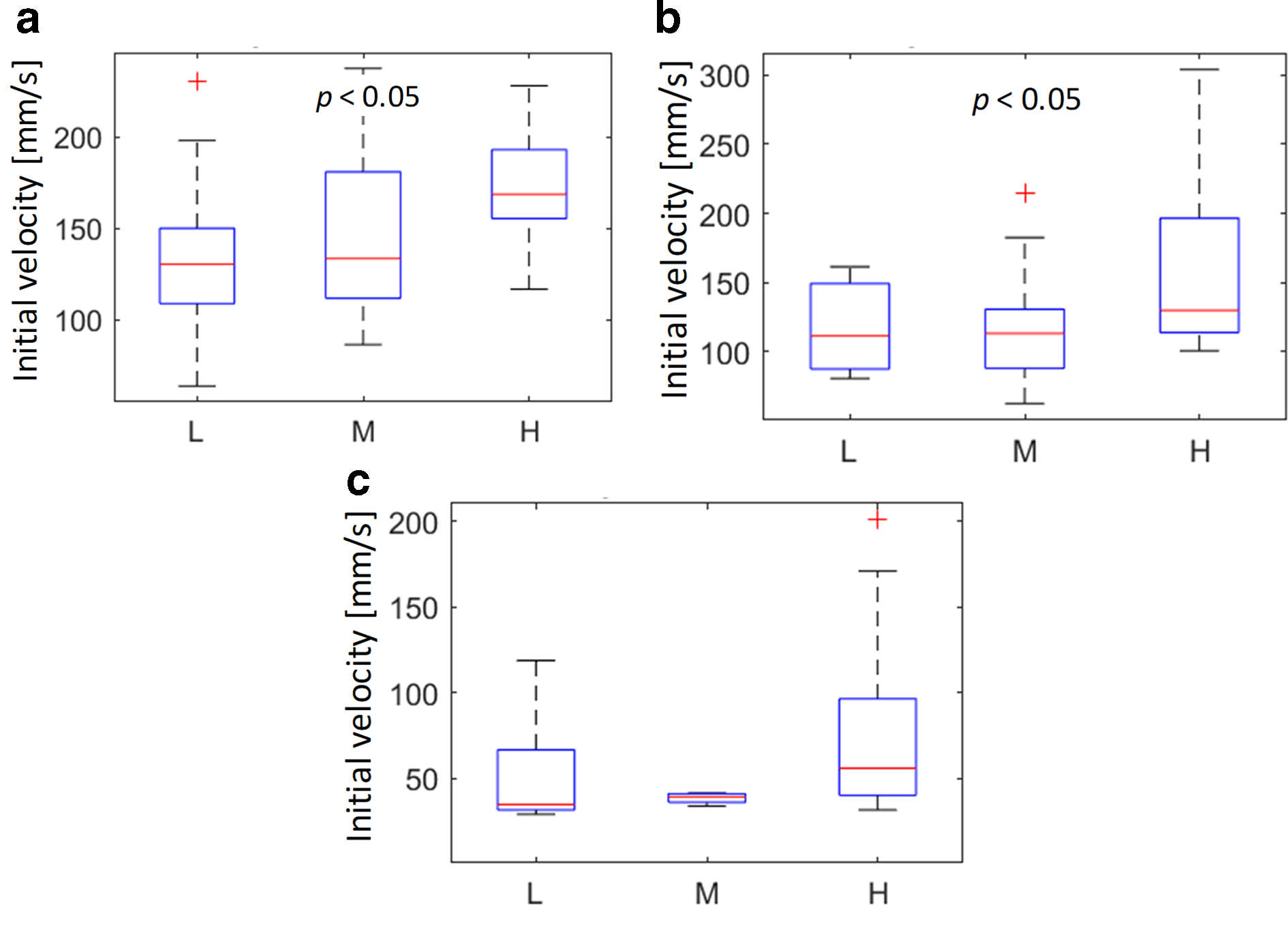
Comparing the effect of informed workload anticipation on the initial velocity with various actual workload cases. Actual workload cases a) Low, b) Medium, c) High.
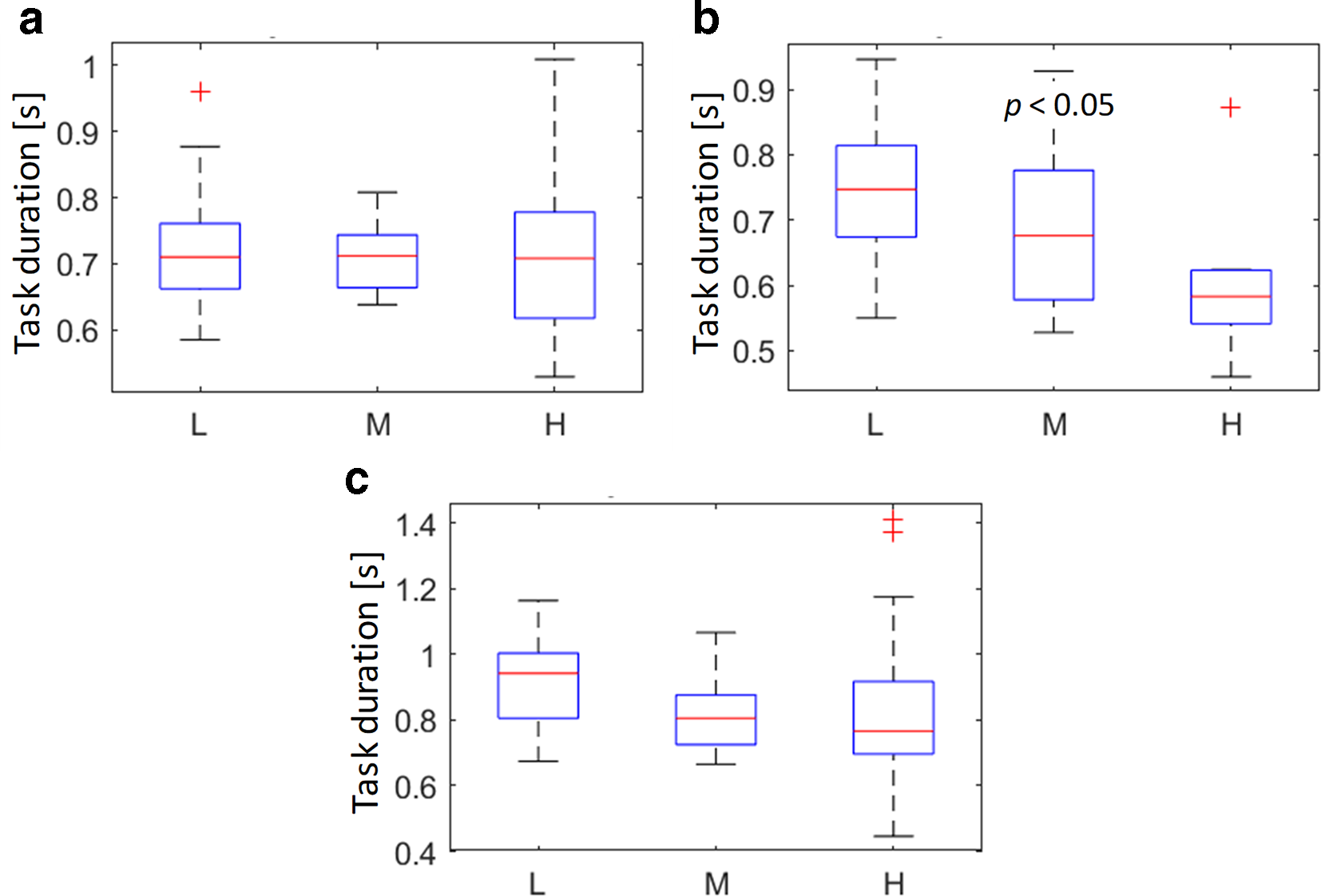
Comparing the effect of informed workload anticipation on the task duration with various actual workload cases. Actual workload cases a) Low, b) Medium, c) High.
Feedforward- and Feedback-Dominant Controls
We were able to classify responses as either feedforward-driven or feedback-driven, based on the relative time delays between the first minimal point and the displacement onset. Figure 10 shows the two different types of force responses we observed among the participants when the actual workload was Heavy. When comparing the displacement profile with the force profile, the displacement onset (point c in Figure 3) may occur before or after the minimal point of the first force peak. The end of the first peak pulse may indicate that the participant has switched from feedforward to feedback force control, based on the perceived workload being heavier than anticipated. We believe this is an important feature that may indicate whether the force response of a participant is more or less reliant upon the workload anticipation. Therefore, we suggest that feedforward-dominant cases are observed when the plate moves before the minimal point of the first peak force, while feedback-dominant cases are observed when the plate does not move until after the first peak force ends.
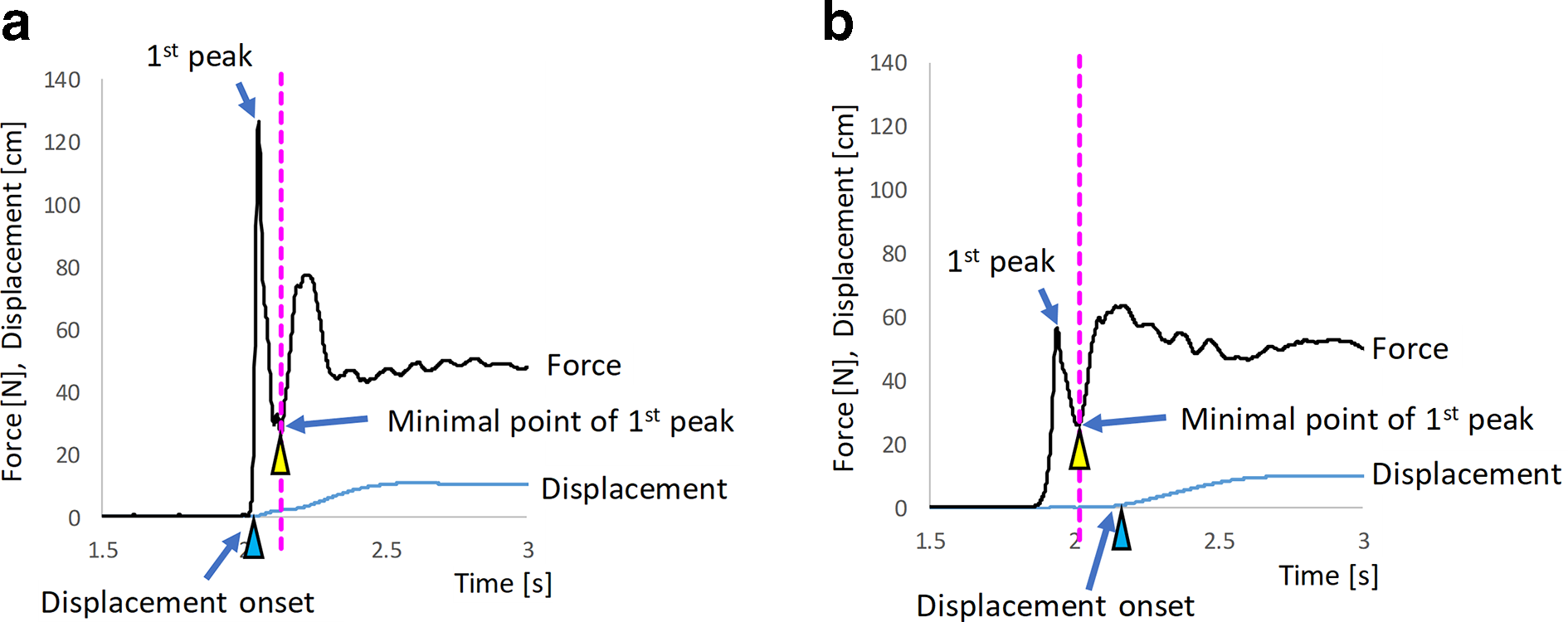
Force and displacement profiles in the first peak dominant (feedforward-dominant) cases (left) and the secondary force dominant (feedback-dominant) cases (right).
Based on this classification scheme, 44% of trials were classified as feedforward-dominant and 56% were classified as feedback-dominant with the Heavy actual workload cases. Feedback-dominant behaviors were not observed with the Light or Medium actual workload cases. Next, the force, motion, and EMG responses were compared between feedforward- and feedback-dominant responses. We found for the trials of Heavy actual workload, the feedforward-dominant responses had significantly larger first force pulse amplitude (p < .001, d = 1.43) and initial velocity (p < .001, d = 1.64) versus feedback-dominant responses (Figure 11). They also had significantly shorter lead time (the time from EMG onset to displacement onset) and task duration (p < .001, d = 1.34, and p < .01, d = .86, respectively).
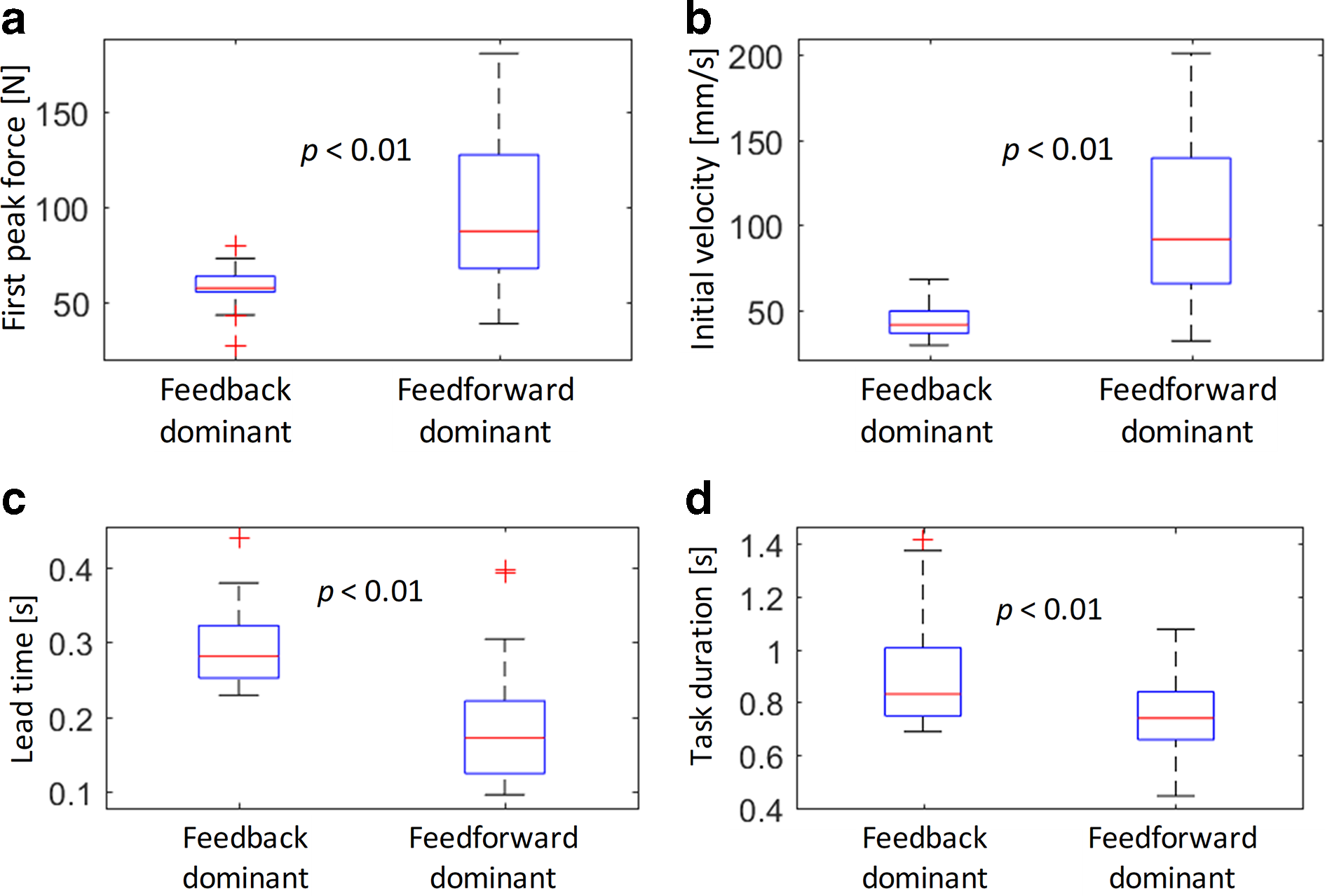
Comparison of the effect of feedforward/feedback controls on the first peak force, initial velocity, lead time, and task duration for Heavy load trial cases. a) First peak force; b) Initial velocity; c) Lead time; d) Task duration.
All responses, regardless of whether they were classified as feedforward or feedback, had similar time delays. These include time delays of (1) the force onset (156 ± 48 ms), (2) the first peak force (195 ± 48 ms), and (3) the first minimal point (265 ± 79 ms) from EMG onset. Each of these time delays were significantly different from each other (Figure 12) and occurred in a fixed sequence. The time duration of the first peak force (109 ± 63 ms) was an invariant parameter in the pushing task across all subjects and conditions, and was not different between trials classified as feedback or feedforward.
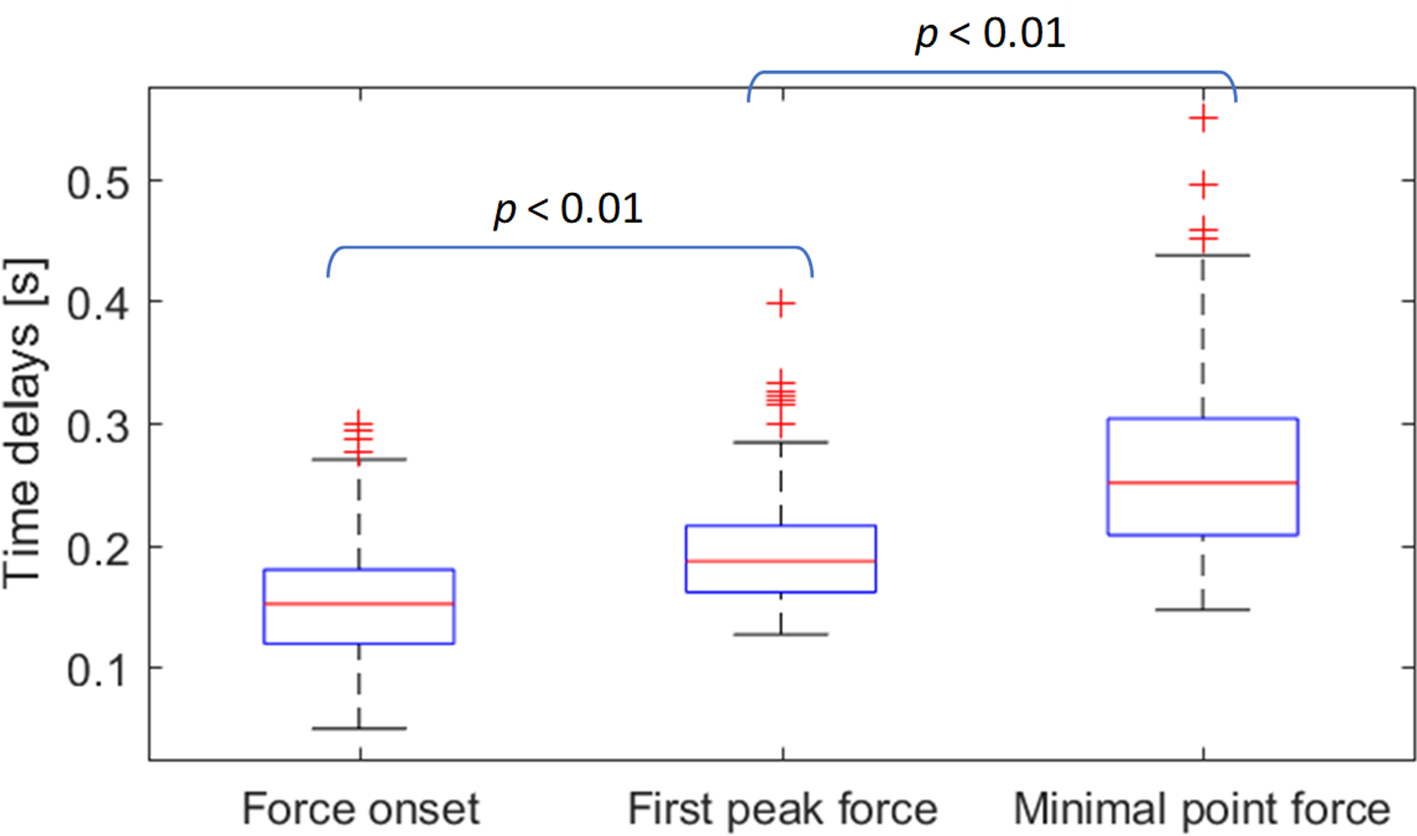
Time delays from EMG onset to the force onset, the first peak force, and the minimal point of force.
Timing of EMG Responses
EMG responses differed both between feedforward- and feedback-dominant responses and as a function of overshoot. Shown in Figure 3, the EMG response of the anterior deltoid muscle typically had two bursts, with the first corresponding to the first peak of force response and feedforward control, based on workload anticipation. With the normalized EMG data, we found that: compared to the trials of acceptable motion accuracy, the trials of motion overshoot had significantly larger values for (1) the first peak value of the normalized EMG signal (p = .005, d = .72, Figure 13(a)) and (2) the time integrated value of the initial burst of normalized EMG signal (p = .006, d = .72, Figure 13(b)). These observations are consistent with the significant differences we found by comparing the first peak force (p = .001, d = .83) and initial velocity (p = .002, d = .83) between overshoot and acceptable motion accuracy (Figure 13(c–d)).
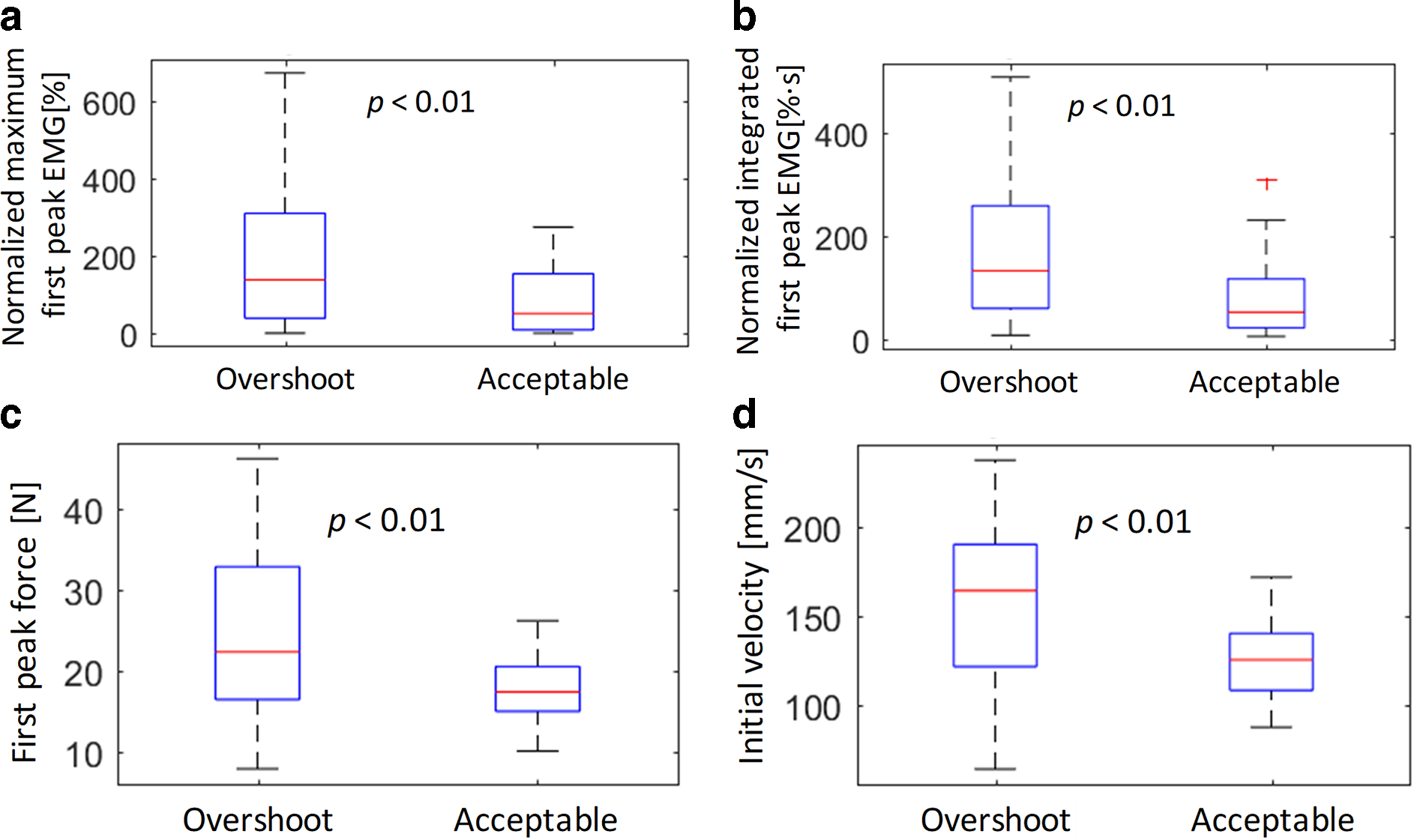
Comparison of maximum value and time integrated value of normalized initial burst EMG, first peak force, and initial velocity based on overshoot/acceptable task results in Light load trials. a) Maximum value of normalized initial burst of EMG signal; b) Time integrated value of normalized initial burst of EMG signal; c) First peak force; d) Initial velocity.
Effect of Preceding Trial
HH performance was moderately affected by the condition of the trial immediately preceding the HH task. Actual workload in preceding trials affected first peak force (p = .077,
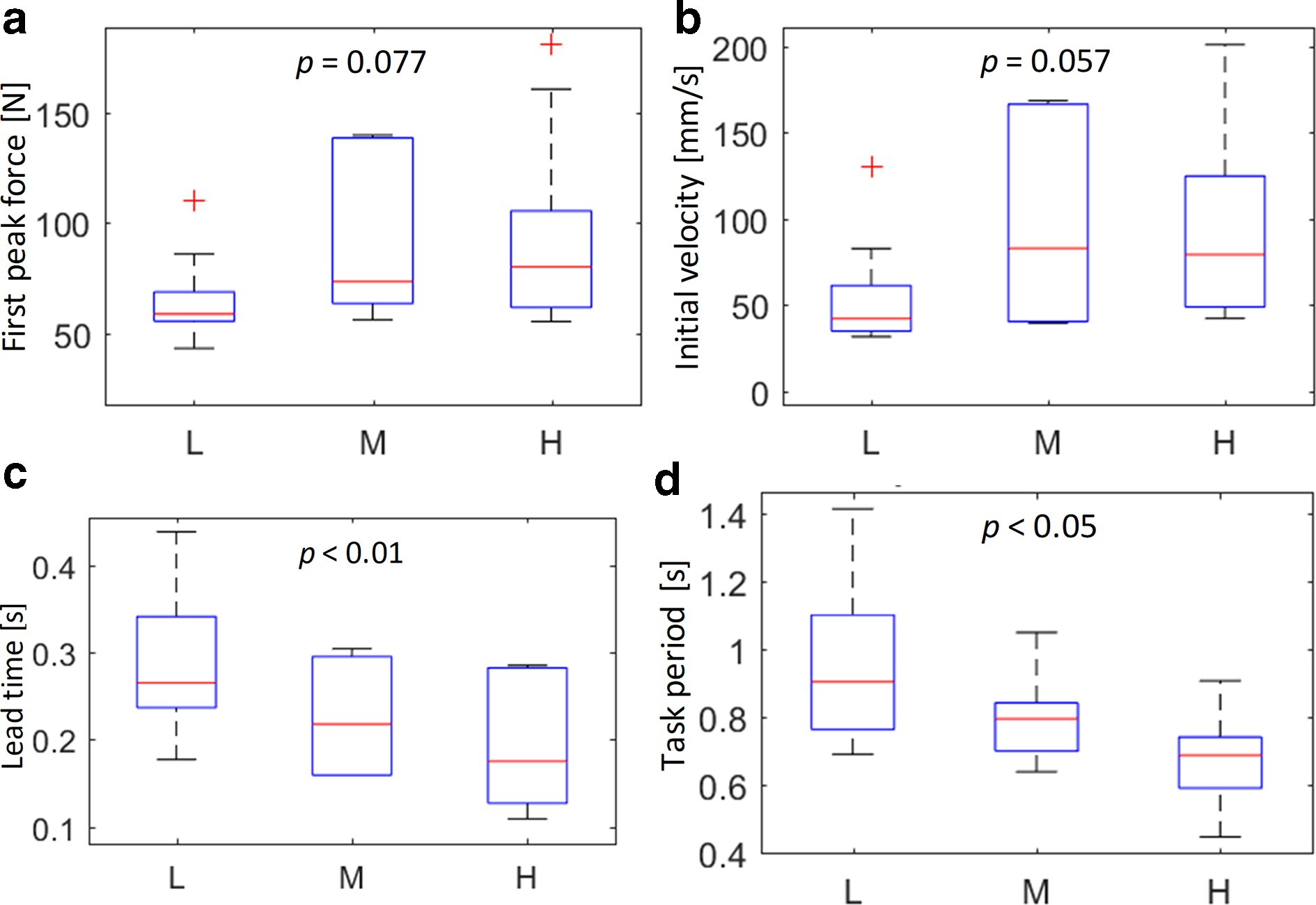
Comparing the effect of preceding trial workload on the first peak force, initial velocity, lead time, and task duration of current trials of Heavy workload. a) First peak force; b) Initial velocity; c) Lead time; d) Task duration.
Discussion
Our study compared human motion and force responses in pushing tasks with different anticipations of the workload. Since the pushing task does not necessarily require deceleration of the hand to manage position control, pushing-only tasks could produce unique behaviors, such as overshoots. We observed several features that can be used to distinguish phases of responses depending more or less on the anticipation of the workload, which may be dominated by feedforward or feedback control, respectively. For the pushing task, we found that the feedback-dominated control was used when the actual workload was Heavy, and while only feedforward control was used (and usually sufficient) when the actual workload was Light or Medium. Our findings are consistent with the time delay of feedback control (about 100 ms) reported by Welch and Ting (2009) in the task of balancing in the presence of floor perturbations. Compared to this fast response based on force and tactile feedback, the responses based on visual and auditory feedback were reported to be much slower (0.18 s and 0.3–0.4 s, respectively) in ideal conditions (Macadam, 2003; Scott, 2004, 2016).
For Heavy workload tasks, participants tend to underestimate the workload even if they are informed correctly. The amplitudes of the first force pulse in the heavy load trials were less than 50 N (the approximate weight being moved). Thus, the second force pulses due to feedback control had to be greater to overcome the perceived resistance and initiate the handling and loading plate motion. This finding may challenge design engineers, because traditional control algorithms for human manipulation are based on iterative learning toward minimizing task errors in motion. Even in recently described controllers, the feedforward term is constructed using an iterative learning process that optimizes control parameters to minimize task errors during the assigned motion. However, our current findings suggest that during some heavy-duty tasks, human motion may not be described by this traditional control theory.
We observed that, especially for Heavy workloads, participants switched from feedforward to feedback controls, after the plate displacement onset. In these trials, the pushing force magnitudes were reduced to the actual load range, while the plates were pushed at nearly constant speed. The second force pulse started about 109 ms after the initiation of the first force pulse, when we believe feedforward control switched to the feedback control. However, our results could also be explained by two different feedback controllers during the pushing task. In this scenario, a force feedback controller could increase pushing force until displacement onset. And a position feedback controller would then dominate after the plate began moving. These assumptions should be further assessed with various motion tasks and with several workloads.
One possible industrial application of our findings is to inform the design of advanced driver assistive systems (ADAS) in intelligent vehicles. For instance, when jointly controlling a vehicle with ADAS, the system may exert haptic feedback to the human driver through their contact with the steering wheel, since human drivers may not see their hands and feet at all (Kimpara et al., 2019). To improve assistive systems, we need a better understanding of these types of human control systems, which include both feedforward- and feedback-dominants. In cases of goal conflict between the human driver and the ADAS, unexpected haptic feedback forces may lead to human motion and force responses that affect driving safety. Another application is in developing improved coaching or training strategies for sports movement. Feedforward-dominant controls may be used to improve sport performances. However, extreme actuations may cause injuries. Training simulations that integrate performance with the control strategy based on anticipatory behaviors may provide new methods to prevent overexertion.
Our study had several limitations. Our sample was small and heavily biased toward males. It is possible that the results may not generalize to other populations, particularly those with neuromotor impairments. We were underpowered to detect all of the effects of trial order and anticipation. However, performing additional conditions would have resulted in an excessively long experimental protocol. Despite the small number of participants, the repeated-measures design resulted in a study that was adequately powered to detect differences in EMG onset timing. Furthermore, the measured effect sizes were generally large (Cohen’s d > .5,
Conclusions
In this work, we performed an experiment to investigate the effects of correct and incorrect force anticipation on the performance of a pushing task. Our results show that the first peak of pushing force increases consistently with anticipatory workload. And overshooting was observed when the anticipatory workload was greater than the actual workload. Participants used feedforward-dominant control to achieve the rapid task with Heavy workloads. In addition, when Heavy trials were preceded by Light trials, participants tended to perform slower and with initially lower force. These findings reveal how workload anticipation affects task performance in motion and force control, and how the workload of preceding tasks may influence the performance of the current task. In our future work, we will incorporate the findings from this user study in the controller development for intelligent vehicle systems when assisting human drivers.
Key Points
Our study investigated the effects of correct and incorrect force anticipation on the performance of pushing-only tasks with different anticipations of the workload using low-friction linear sliders.
The first peak force, which may be interpreted as a feedforward-dominant effect, increases consistently with anticipatory workload.
Our results show that participants used feedforward-dominant control to achieve the rapid task with heavy workloads.
The workload of preceding tasks may influence the performance of the current task.
Footnotes
Acknowledgments
This is a collaborative research of Toyota Motor Corporation. We would like to thank Mr. Thomas Partington, lab manager of Chemical Engineering Department at Worcester Polytechnic Institute, for development of test-bench for force anticipation study.
Author Biographies
Hideyuki Kimpara was senior principal engineer at future research department of Toyota Motor North America R&D, Ann Arbor, MI, and visiting research scientist at Worcester Polytechnic Institute (WPI), Worcester, MA. He holds a Doctor of Engineering degree from Nagoya University, Japan, in 2015.
Kenechukwu C. Mbanisi is a PhD candidate in robotics engineering from WPI, MA, USA. He holds an MS degree in robotics engineering from WPI in 2018.
Zhi Li is an assistant professor in the Robotics Engineering Program and Mechanical Engineering Department at WPI, USA. She received her PhD in computer engineering from the University of California, Santa Cruz, in 2014.
Karen L. Troy is an associate professor in the Biomedical Engineering Department at WPI, USA. She received her PhD from the University of Iowa in 2003.
Danil Prokhorov is the head of the Future Research Department at Toyota Motor North America R&D. He received his PhD from Texas Tech in 1997.
Michael A. Gennert is professor of Robotics Engineering, CS, and ECE at WPI, where he directs the WPI Humanoid Robotics Laboratory and was Founding Director of the Robotics Engineering Program. He received his SB in CS, SB in EE, and SM in EECS in 1980 and the ScD in EECS in 1987 from MIT.