
Abstract
Background
E-scooter injuries have risen in recent years and riders report a relatively high prevalence of accidents. Collisions with motor vehicles pose a high risk to e-scooter users. E-scooter riders move fast relative to runners but lack movement of limbs that present aspects of biological motion to drivers, which may diminish conspicuity.
Method
Two experiments measured participants’ detection of point light representations beneath masking visual noise. Study 1 presented a runner, e-scooter rider, and rectangular object. Study 2 modified the e-scooter stimuli to remove motion sway and added alternative e-scooter presentations, one with moving lights consistent with biological motion and the other with the same motion in reverse, inconsistent with biological motion.
Results
Study 1 found a main effect of figure type, with the runner resulting in superior detection, recognition, and response time compared to the e-scooter rider, which performed better than the object. Study 2 found better perception performance for the runner, including better detection compared to the reverse motion e-scooter.
Conclusion
Findings suggest that reduced biological motion produced by e-scooter users slightly worsens and slows their detection by other road users and indicates an advantage for the perception of human body configurations. Any inclusion of apparent motion to improve detection, especially near the ground, should be consistent with biological motion.
Application
Visual display alterations (e.g., lighting) to introduce apparent motion that mimics biological movements or is consistent with biological motion may potentially confer a detection advantage over other movement patterns.
Keywords
Introduction
Since the emergence of electric scooter (e-scooter) sharing companies in 2017, e-scooter related injuries requiring emergency department attention have dramatically increased. Estimated emergency room visits for e-scooter related injuries increased from 4881 in 2014 to 26,628 in 2019 (Farley et al., 2020), and the US Bureau of Transportation Statistics (2024) reports that the number of US cities served by electronic scooter (e-scooter) systems has increased by 47% from 2020 to 2023, leading to an increased opportunity for crashes and injury. E-scooter riders report a relatively high prevalence of crashes, with 26.7% reporting a crash event and 15.2% reporting an injury (Tian et al., 2022). Rix and colleagues (2021) examined Texas traffic data and estimated e-scooters resulted in 180 injuries per million vehicle miles traveled (MVMT) compared to an estimated 0.9 injuries per MVMT for motor vehicles. These figures only account for injuries requiring emergency room intervention. Furthermore, bicyclists appear to have a slightly higher overall total and injury crash rate than pedestrians when accounting for volume and exposure on lower speed roads (Amoh-Gyimah et al., 2016; Beck et al., 2007; Siddiqui et al., 2012), but e-scooter riders report a higher relative rate of crash incidents compared to bicyclists and pedestrians (Sanders & Nelson, 2023), although clearly establishing the relative prevalence of crash rates by modality is not yet possible given the current quality of crash data.
Top Three Injury Mechanisms for e-Scooter Injury Study.
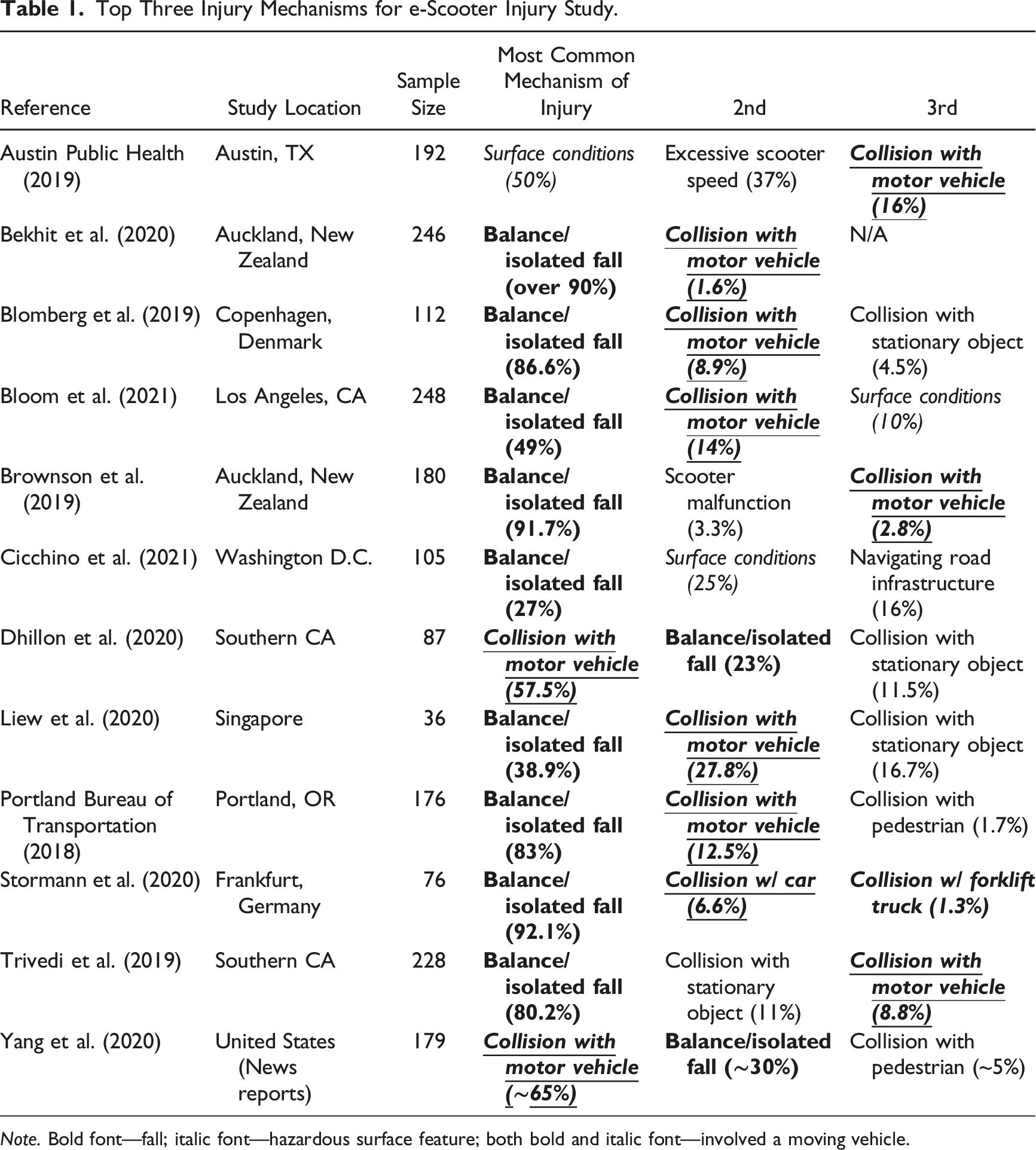
Note. Bold font—fall; italic font—hazardous surface feature; both bold and italic font—involved a moving vehicle.
E-scooter conflicts with vehicles are a significant cause of injury. Shah and colleagues (2021) analyzed e-scooter and bicycle crashes caused by conflict with motor vehicles over a two-year period and found that most e-scooter crashes occurred at an intersection or at the junction of a driveway and roadway. The majority of e-scooter crashes occurred when the driver of the motor vehicle was driving straight or turning right, and the e-scooter was moving from the right of the motor vehicle or moving in the same direction as the motor vehicle. Sievert and colleagues (2023) surveyed e-scooter riders about perceived safety risks and found that uneven roadway surfaces and collision with a moving motor vehicle were of the greatest concern to e-scooter riders. Additional factors may increase the odds and severity of scooter crashes involving motor vehicles. For example, e-scooter riders were less likely to wear a helmet than cyclists and were more likely to ride under the influence of alcohol (James et al., 2023; Leyendecker et al., 2023).
Biological Motion
One factor that may increase the risk of e-scooter crashes with motor vehicles is the relative absence of biological motion produced by e-scooter users. Pedestrians and cyclists generate a range of recognizable biological motion cues through the movement of their arms, legs, shoulders, and hips, although bicyclists may present less overall biological motion than pedestrians. E-scooters require minimal physical input from their riders, and the reduction of biological motion may lead to subsequent increased difficulty of visual detection by drivers.
The classic paradigm in biological motion research employs point light (PL) displays, during which participants are shown footage of actors walking with light points visible at their head and joints, but with no other parts of the body visible, with the resulting pattern consistently identified by participants as a walking person (Johansson, 1973). Studies considering biological motion with PL displays have found that humans can detect a variety of different actor characteristics such as type of movement, emotions, and sex (Dittrich, 1993; Dittrich et al., 1996; Kozlowski & Cutting, 1977). Observers are also capable of making identifications when some light points are removed, and in the presence of noise and distractors (Cutting et al., 1988; Mather et al., 1992). PL dots representing the extremities of the body were most crucial to recognition and complex trajectories of motion in the extremities were identifiable as belonging to a walking human (Mather et al., 1992). Cutting and colleagues (1988) evaluated various types of noise masks and their effectiveness at obscuring PL walkers from detection of implied motion direction and found that only complex and significant noise masking could substantially reduce the direction detection of PL figures from ceiling performance when the figures were presented up to 400 milliseconds or longer.
Biological motion indicators can improve pedestrian and bicyclist conspicuity, especially at night (Wood, 2023). Owens and colleagues (1994) were among the first researchers to examine how biological motion impacts the detectability of pedestrians at night. Retroreflective markings highlighting biological motion at the extremities resulted in significantly longer time-to-collision detections of pedestrians than a retroreflective vest (Owens et al., 1994). Multiple studies have demonstrated the beneficial effects of highlighting biological motion in pedestrians at night (Balk et al., 2008; Black et al., 2021, 2023; Luoma et al., 1996; Wood et al., 2014, 2017). The use of biological motion indicators is unsurprisingly more effective when the pedestrian is in motion relative to standing still (Mian & Caird, 2018), and provides a detection advantage in environments with significant visual clutter (Tyrrell et al., 2009). For bicyclists, participants reported that when a taillight or florescent marking was placed on the extremities (i.e., ankles and legs) of a bicyclist, the bicyclist was more conspicuous at significantly greater distances, with fewer recognition failures, relative to placements at the seat or the helmet (Edewaard et al., 2020), torso (Wood et al., 2022) or the posterior of the bicyclist (Blomberg et al., 1986).
E-scooter users typically stand upright and motionless with one foot ahead of the other on the scooter platform, with both hands on the handlebars, leading to minimal presentation of biological motion (see Figure 1). Although higher relative speeds are likely a major factor, the reduction of biological motion cues may contribute to findings of a higher rate of reported e-scooter crashes relative to pedestrian crashes (Karpinski et al., 2023; Sanders & Nelson, 2023). Bicyclists only present partial biological motion through their legs, and at some viewing angles (e.g., from the side) only one moving leg may be easily viewable. Same-side or ipsilateral limb movements are perceived better than random movement configurations, but not as well as different side or contralateral limb movements or whole-body movements (Pinto & Shiffrar, 1999). The reduced biological motion presented by bicyclists may potentially contribute to the higher rate of overall crashes for bicyclists relative to pedestrians, along with speed and exposure factors (Amoh-Gyimah et al., 2016; Beck et al., 2007; Siddiqui et al., 2012). Another consideration is the competition for visual attention in the driving environment. Scooter deployment is relatively recent so there is less time to develop well-established and learned visual cues. Consequently, drivers of vehicles may be less likely to have accurate situation awareness of the travel dynamics of those traveling on e-scooters. Still images of a pedestrian point light (PL) walker progressing through time/motion compared to a point-light e-scooter rider progressing through time/motion. These PL figures were not used in the following studies.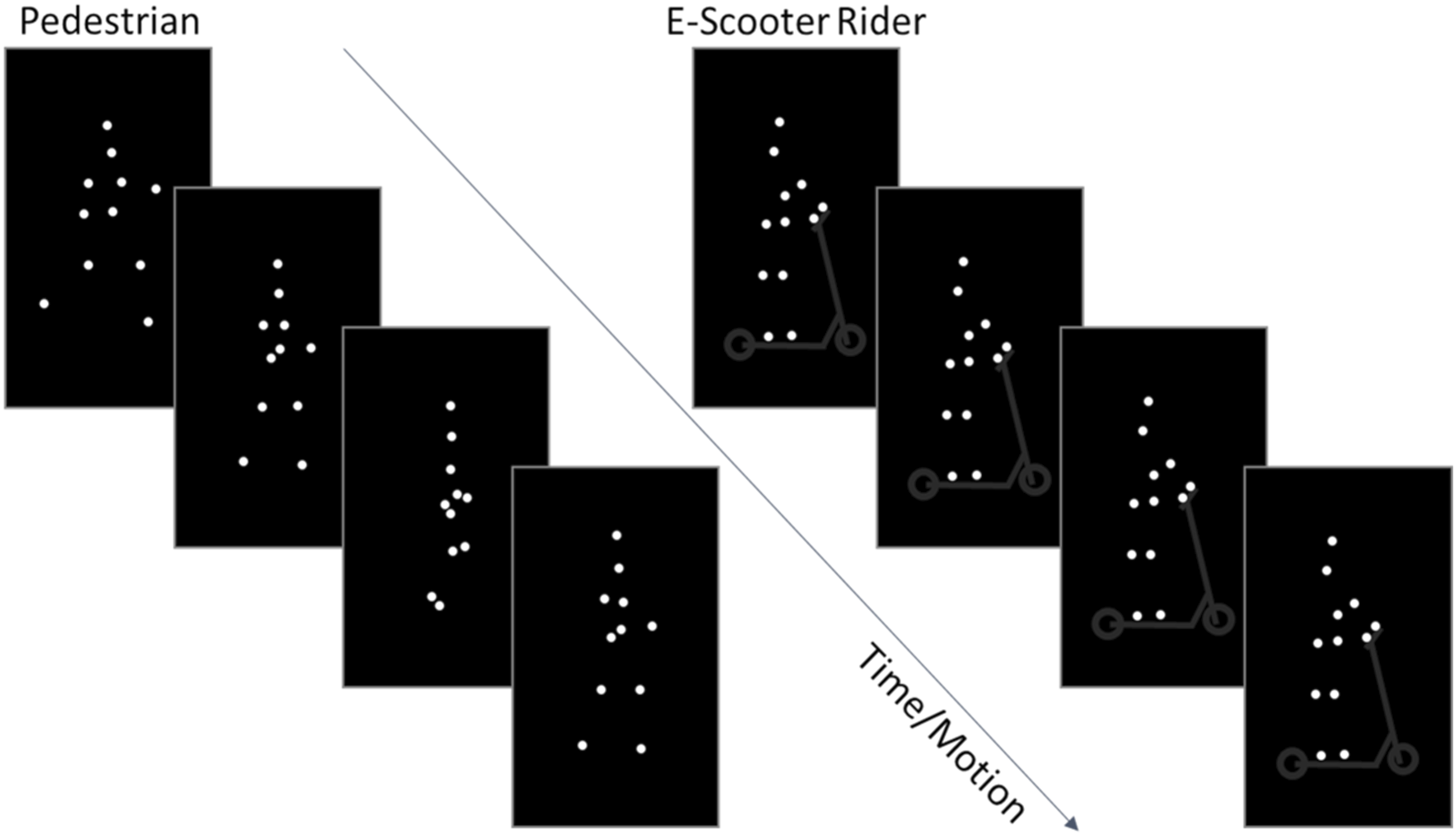
Biological motion predicts that the runner PL figure will be detected more accurately and quickly than a scooter or an object figure. There are other potential alternative explanations governing detection of stimuli which may be relevant in this context. The gestalt principles of proximity and common fate suggest that overall object motion with points moving together and independent relative to other stimuli in the visual field may lead to greater detectability of the object (Spillmann, 2012; Wertheimer, 1923/2012). This overall object motion hypothesis would suggest that the additional motion of the runner and any residual motion presented in the PL scooter figure would lead to greater detectability, relative to rigid objects. Another potential explanation is that the organization of the point lights for the e-scooter rider presents configural information consistent with the structure of the human body, and this configural form detection plays a major role in the perception of biological motion (Lange & Lappe, 2006). Research with PL displays indicates that people exploit human configural arrangements without movement (Pinto & Shiffrar, 1999). Applied research examining the detectability of pedestrians at night by applying retroreflective markings on the pedestrians found that the best detection rates were found with the full biological motion condition with multiple limb segments (e.g., arm, leg, and torso) made visible and in walking motion, but detection performance was also superior for that marking condition when standing (i.e., not in motion), relative to the other nonmotion conditions (Balk et al., 2008). If the human body configuration has an advantage in detection, this would predict superior detection advantage for the runner and scooter PL figures relative to the object, irrespective of motion.
The current study explored whether the relative absence of biological motion cues produced by e-scooter users makes them more difficult to detect visually by using PL displays of a runner, an e-scooter rider, and a control object in motion within a mask of distractor particles. The authors selected the approach of PL figures as this is the original format under which biological motion was examined in perception (Johansson, 1973) and allows for such examination under short spatial and temporal intervals without significantly involving other confounding higher-order visual processes (Mather et al., 1992). This helps us better examine whether biological motion is a plausible contributory factor in detection of e-scooters, at the cost of reducing real-world generalizability of the immediate findings. We hypothesized that the e-scooter PL figure would be more difficult for participants to visually detect, potentially indicating the reduction of biological motion as a contributor to crashes and injuries resulting from conflict between e-scooters and motor vehicles.
Study 1 Method
Participants
An experiment was conducted with 62 participants aged 18–60 years old (M = 35.76, SD = 13.22). A recruitment and online screening survey was distributed via flyers posted on a large public university campus in the Midwest, shared on social media accounts, and advertised on Craigslist. Prospective participants verbally reported the absence of epilepsy or other sensitivities to flashing lights. Demographic information was electronically collected from study participants in person, via a Qualtrics™ survey, including age, gender, education, and racial background. Of the 62 participants, 40 (64.5%) were male, 21 (33.9%) were female, and 1 (1.6%) was nonbinary. The mean age of participants was 36 years (SD = 13.1). Other survey materials included a driving history questionnaire, whether and how often participants had ridden e-scooters in the past. This research complied with the American Psychological Association Code of Ethics and was approved by the Institutional Review Board at the University of Minnesota (Study ID: STUDY00010556). Informed consent was obtained from each participant.
Study 1 Apparatus and Materials
Point Light Representations
Moving point light (PL) representations were displayed as video clips beneath a layer of dots (called noise or distractors) which move at various speeds and paths to make the recognition task more difficult, with parametric manipulation of noise levels for 40,000 (40k), 60,000 (60k), and 80,000 (80k) noise dots. The approximate density of distractor dots was 0.2068 (40k), 0.3102 (60k), or 0.4136 (80k) particles per cubic meter. Three target PL characters were used that represented (1) a running human, (2) a human riding an e-scooter, and (3) a cube-like shape (“object”), as well as a final condition (4) no object present (see Figure 2). Each figure was represented with 13 white points to keep the number of visual stimuli constant across figure conditions. The points of the runner were articulated to represent the motion of a human. The points of the scooter rider and object were fixed relative to each other. All video clips were displayed for 1 s, with a window of 1 additional second after display in which participants were still able to respond. The height (1.518 m) and width (.564 m) of the object approximated the maximal vertical and horizontal distances between the points of the runner (height = 1.518 m; width = .429 m) and the e-scooter rider (height = 1.648 m; width = .429 m). All objects were in motion and had a speed of 3.12 m per second and moved in one of four directions: left across the screen, right across the screen, “into the screen” or away from the observer, and “out of the screen” or towards the observer. The camera or viewing perspective was set at 2.822 m distance from the center where the PL figure crossed in left/right direction conditions, 2.540 m distance in toward conditions, and 3.104 m distance in away conditions. The position and articulation of the runner’s points were created using free-use motion capture data from Carnegie Mellon University, see author note and data availablity statement. The scooter rider figure was created by taking the human joint position in the CMU data and matching it to a Segway Ninebot Max e-scooter. Images of PL target characters: runner, e-scooter rider, and a box-like object (left to right). For visual clarity in this paper, duplicate images of the runner and e-scooter rider are provided with lines to indicate the connected joints. Participants did not see the lines.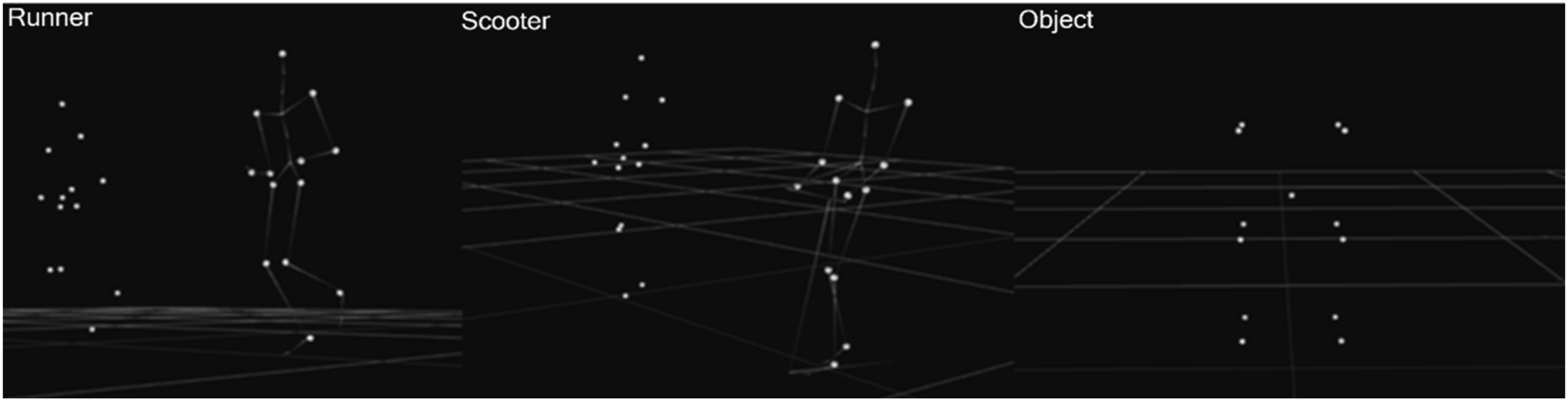
Testing was conducted in a laboratory environment with overhead fluorescent lighting conditions consistent across participants. Participants were positioned approximately 90 cm away from the screen, with the PL video having an on-screen resolution of 1620 × 1080 with physical dimensions of 15.5 cm × 10.0 cm. The screen used was a Dell P4317Q with a resolution of 3840 × 2160. Using JavaScript, a set of up to 80,000 randomly positioned distractor points was generated about the center of the presented environment, which consisted of a horizontal radius of 45.2 m and a vertical radius of 22.6 m (see Figure 3). Each subset of 1000 points out of the 80k (k = 1000) randomly rotated about all three axis (x-, y-, z-axis). A 32 × 32 pixel PNG of a white circle was attached to each point. During a trial all points were in motion at a speed of 1.7 m per second. Motion of the sets was evenly distributed such that one-quarter of the sets moved in each direction (toward, away, left, and right). For the monitor in this study, the pixel pitch was 0.2451 mm in diameter. The apparent visual size of each revolving dot would be about 31.86 mm in diameter for the dots “nearest” to the viewer, and 1.23 mm in diameter for the dots “farthest” from the viewer, with a viewing distance of 900 mm from the viewer to the monitor. Representation of visual noise radius in a sphere (∼45 m diameter) along with visual noise direction around the moving point light target (i.e., stick figure). The participant’s perspective (white arrows) is within the visual noise sphere, approximately 2.5–3.1 m from the center depending on direction condition, viewing the moving PL figure crossing the center of the sphere moving either directly toward or away from the participant or moving left or right across the participant’s view.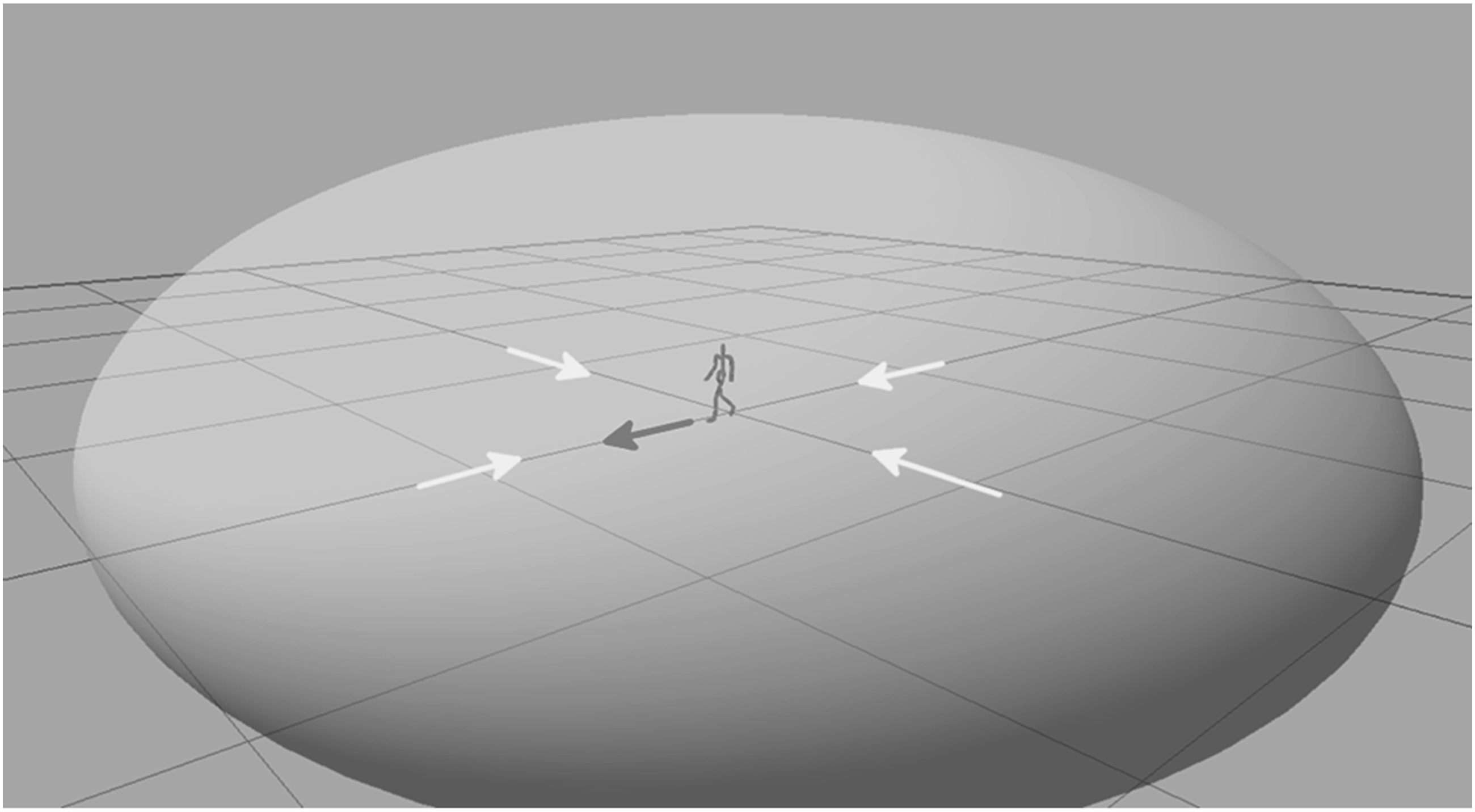
Procedure
After providing informed consent and answering the questionnaires, participants received an explanation as to the format of each trial. Each trial displayed a video clip containing the mask and point light figure (if present). If the participant saw something beneath the noise, they responded with a space bar press. Reaction time to press the spacebar was measured. The participant’s task was to identify the presence or absence of a PL figure and the direction of motion of the PL figure if one was present, that is, runner, e-scooter rider, object, no figure, or unsure via key press (R, S, O, N, and X, respectively). Finally, if a PL target was present, to identify the direction the point light representation was moving via arrow key press, that is, left across the screen (←), right across the screen (→), “into the screen” or away from the observer (↑), and “out of the screen” or towards the observer (↓). Participants were also able to answer “Unsure” to type of figure and directionality, providing better granularity to the resulting data by ensuring visual detection of motion could still be identified as having taken place—even if the participant was not confident in what they saw. See Figure 4 for a demonstration of two enhanced frames of the runner and e-scooter rider in motion (not as depicted in the study). Frame captures of point light runner (left) and e-scooter rider (right) in motion with white point lights within white point distractor lights (noise). The PL are indicated here with grey dots for contrast (white in the experiment) and connected in lines for the reader. The lines were not present in the experiment.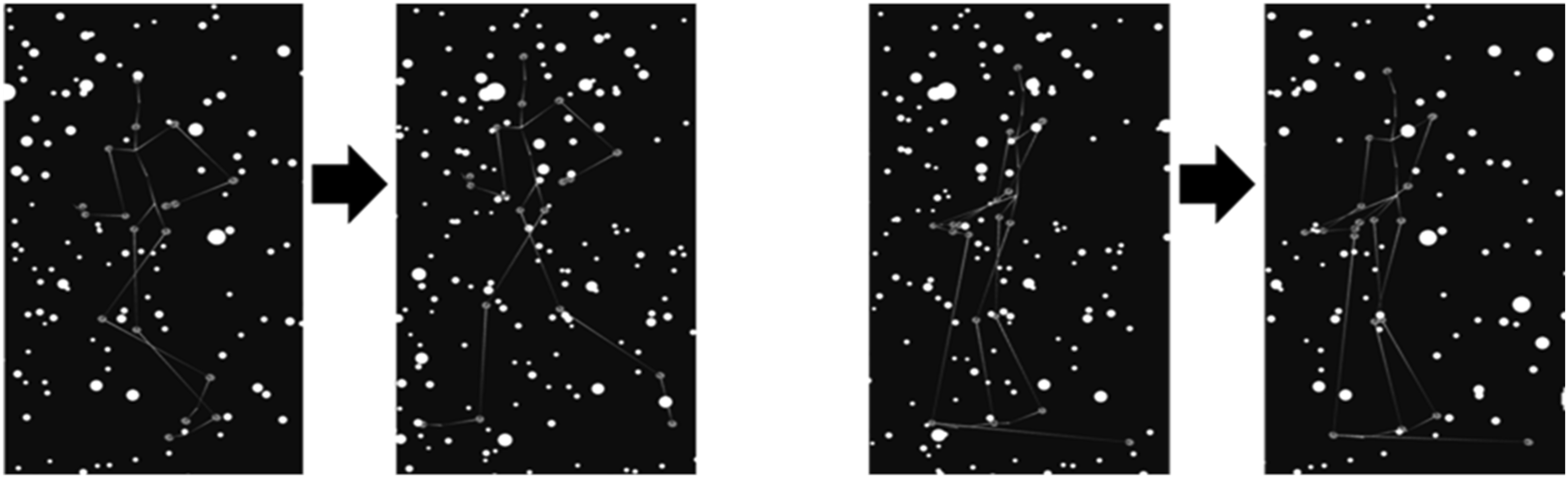
Experimental Design and Trials
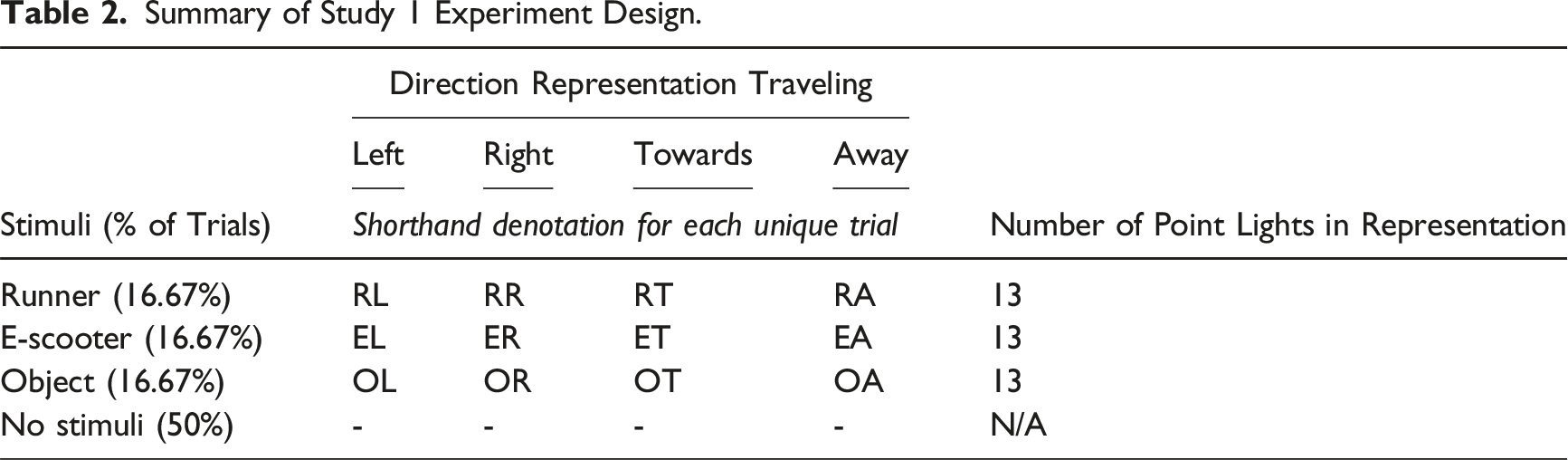
Summary of Study 1 Experiment Design.
Practice Trials
Participants were shown a round of practice trials to familiarize them with the task and the keyboard controls for responding during the task before immediately advancing to the 144 experimental trials. The practice rounds consisted of 25 different trials. • Practice Set 1: 12 trials, each figure, in each direction, with no noise particles. • Practice Set 2: 1 trial showing only the noise with 40k particles. • Practice Set 3: 12 trials displaying each figure, in each direction, with 40k particles.
Participants were given instructions with the practice trials to help them understand the task. For responding to the figures, the participants were told: “When you think you see the figure, you’ll tap space […] There is a timer that goes fairly quickly when each figure starts to display, so responding quickly with space is important as well.” After being shown Practice Set 2 (noise trial), participants were told: “So that is the first example of the noise or clutter that is going to be obscuring the figures. You are still looking for the same figures that you saw in the practice, just moving behind this cloud of dots. Now that the noise is being presented, there is the option that no figure will be shown—it may be only noise.”
Measures and Analyses
The following analyses consider the effects of the independent repeated measures variables of character (runner, scooter, and object) and distractor (40k, 60k, and 80k) on detection accuracy, recognition count, and response time. For analyses, this resulted in a 3 × 3 repeated measures design. The direction the point light figure traveled with respect to the viewer (left, right, towards, and away) were averaged together across these analyses. The no-stimuli condition was used to determine detection accuracy but was not otherwise considered in these analyses. For target detection, the analysis examined the signal detection theory measure of A’. A’ can better account for ceiling and floor performance (Stanislaw & Todorov, 1999). False alarm rates were calculated for nonevent trials for each level distractor (40k, 60k, and 80k). For recognition count, the sum of correct identifications for a given character in a particle condition was calculated, with higher counts indicating greater recognition accuracy with a total possible count of 8 per cell. For the response time when individuals indicated that they detected a target, we used nontransformed reaction times beginning with trial initiation and ending with the time the participant pressed the response button. Trials lasted for 2 s, resulting in a range of values from 0 to 2 s. Repeated measures ANOVAs were conducted for the analysis of each dependent variable.
Study 1 Results
Study 1 Descriptive Statistics.
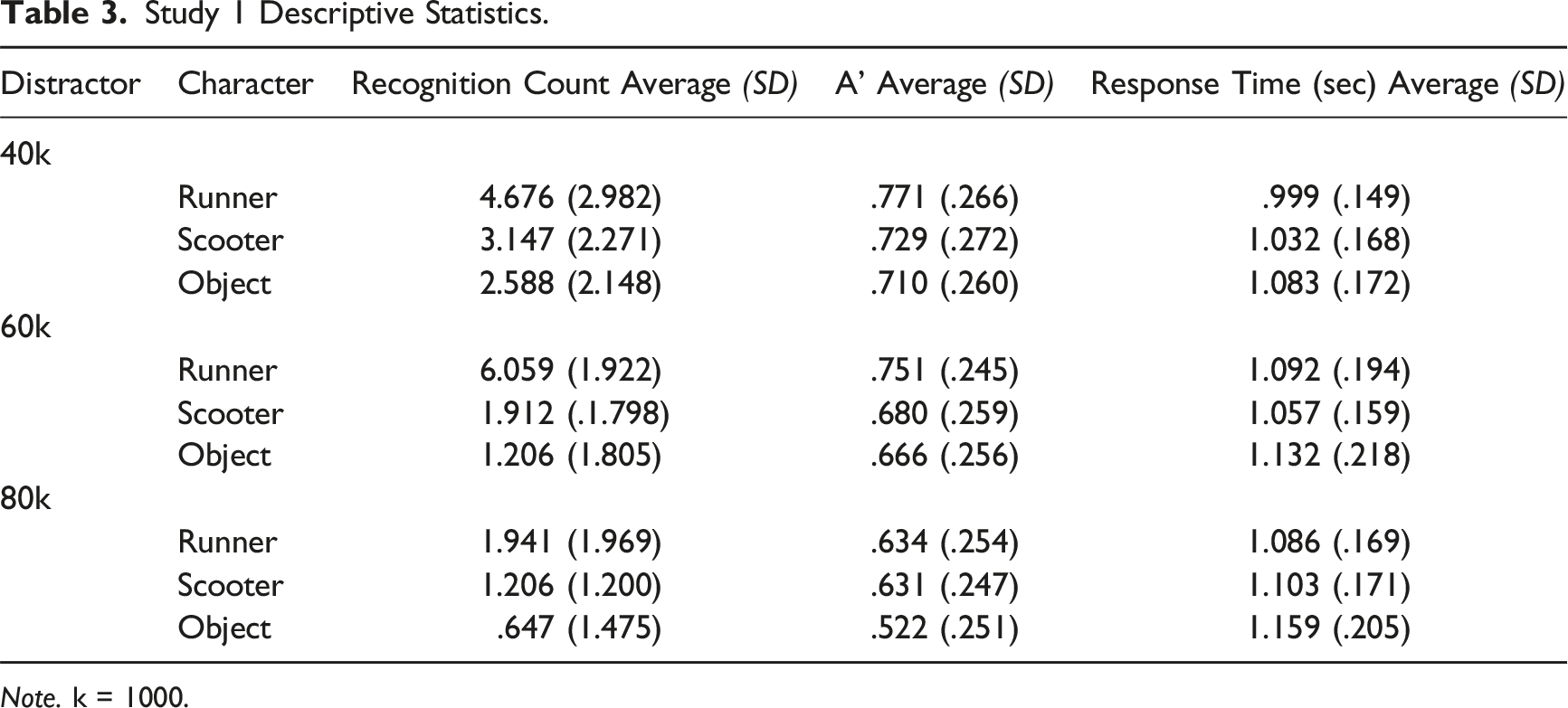
Note. k = 1000.
For recognition count, there was a significant Character by Distractor interaction, F (4, 132) = 24.032, p < .001, ω 2 = .190. Post-hoc analyses indicated that there were significant differences in recognition counts between the Runner and Scooter conditions for the 40k distractor level, t (33) = 3.482, p = .003 (Holm corrected), d = .761, and the 60k distractor level, t (33) = 9.767, p < .001 (Holm corrected), d = 2.061, but not for the 80k distractor level, t (33) = 2.321, p = .053 (Holm corrected), d = .366. The Runner and Object character conditions were significantly different for all Distractor conditions (ps < .05), and the Scooter and Object character conditions were not significantly different for all Distractor conditions (ps > .09). There was a main effect of Distractor, Huynh-Feldt corrected, F (1.769, 58.387) = 44.713, p < .001, ω 2 = .308. There was a significant difference for the 40k and 80k conditions, t (33) = 8.402, p < .001 (Holm corrected), d = 1.098, and the 60k and 80k conditions, t (33) = 9.475, p < .001 (Holm corrected), d = .893, but no significant difference between the 40k and 60k conditions, t (33) = 1.457, p = .154 (Holm corrected), d = .205. There was a main effect of Character, F (2, 66) = 35.667, p < .001, ω 2 = .338. There was no significant difference in recognition for Scooter and Object conditions, t (33) = 1.774, p = .085 (Holm corrected), d = .302, whereas there was a significant difference between the Runner and Scooter conditions, t (33) = 7.508, p < .001 (Holm corrected), d = 1.064, and the Runner and Object conditions, t (33) = 7.057, p < .001 (Holm corrected), d = 1.366.
For response time, there was no observed interaction between Distractor and Character (p = .547). There was a main effect of Distractor, Huynh-Feldt corrected, F (1.772, 60.263) = 5.191, p = .011, ω 2 = .041. There was a significant difference between average response times for the 40k and 60k conditions, t (34) = 2.786, p = .017 (Holm corrected), d = .315, and the 40k and 80k conditions, t (34) = 3.163, p = .010 (Holm corrected), d = .441, but not for the 60k and 80k conditions (p = .452, Holm corrected). There was a main effect of Character, F (2, 68) = 6.066, p = .004, ω 2 = .038. There was a significant difference in response times for the Runner and Object conditions, t (34) = 3.140, p = .010 (Holm corrected), d = .360, and the Scooter and Object conditions, t (34) = 2.620, p = .026 (Holm corrected), d = .331, but no difference between the Runner and Scooter conditions (p = .782).
Preliminary Discussion
The results of the first study indicated a significant effect of PL figure type, with the runner detected in noise more frequently than the e-scooter rider or object. Participants responded faster when shown the runner compared to the object. In general, participant performance in the e-scooter figure condition was worse than in the runner condition, but better than in the object condition. Although the results support the role of biological motion perception in explaining the differences between the PL runner condition and the other conditions, it is less clear why performance in the e-scooter condition was better than performance in the object condition. While the point lights of the figures had similar hue, luminance, and size relative to the distractor particles, the distance between the point lights in the e-scooter rider were closer in spacing relative to the object and had a very slight sway, like a slight lateral sway for a real e-scooter rider that is moving longitudinally on a path. The object figure moved with no sway. This suggests that there are potential effects of either biological motion, human body configuration, overall object motion, or some combination of those three factors. A second study was conducted to partially disentangle these factors.
The second study had the following changes. First, the PL e-scooter figure motion sway was removed. If increased overall object motion is a major contributor, we predicted that this would lead to comparatively worse performance for the scooter condition. Second, two new conditions were also added, presenting two alternate scooter conditions with the handlebars appearing and disappearing in a contralateral or ipsilateral flashing pattern relative to the bottom lights, and the bottom point lights on the figure along the deck of the scooter were now traveling in either a forward or backward motion. The forward motion and contralateral handlebar-footfall pattern is consistent with biological motion, as a footfall and opposite hand raise made by a runner moving in the same direction of motion as the PL scooter figure, whereas the backward or reverse motion and ipsilateral handlebar-footfall pattern is not consistent with biological motion generated by a runner moving in the same direction. These two areas of handlebars and e-scooter deck were chosen to be in motion and flashing to best integrate the scooter PL figure with similar levels of motion either consistent with or inconsistent with biological motion, because those areas of an actual e-scooter (e.g., along the deck sides) could be outfitted with a lighting system to provide additional visual salience to increase detectability of scooters in a multimodal travel environment. If there is a general perceptual advantage for biological motion, the prediction was better performance for the scooter condition consistent with biological motion relative to the reverse motion scooter condition inconsistent with biological motion.
Study 2 Method
Participants
An experiment was conducted with 66 participants, aged 18–67 years (M = 31.83, SD = 12.41). Prospective participants were screened for the absence of epilepsy or other sensitivity to flashing lights. Of the 66 participants, 41 (62.1%) were male, 24 (36.4%) were female, and 1 (1.5%) was nonbinary. Similar study recruitment methods were employed as in Study 1. Eleven (11) participants participated in both studies. There was minimal concern with performance improvement across studies, as the studies took place approximately 10–12 months apart. To control any potential effects of prior learning, the performance of the 11 participants was examined across studies, described in the Study 2 results section. This research complied with the American Psychological Association Code of Ethics and was approved by the Institutional Review Board at the University of Minnesota (Study ID: STUDY00021713). Informed consent was obtained from each participant.
Apparatus and Materials
Point Light Representations
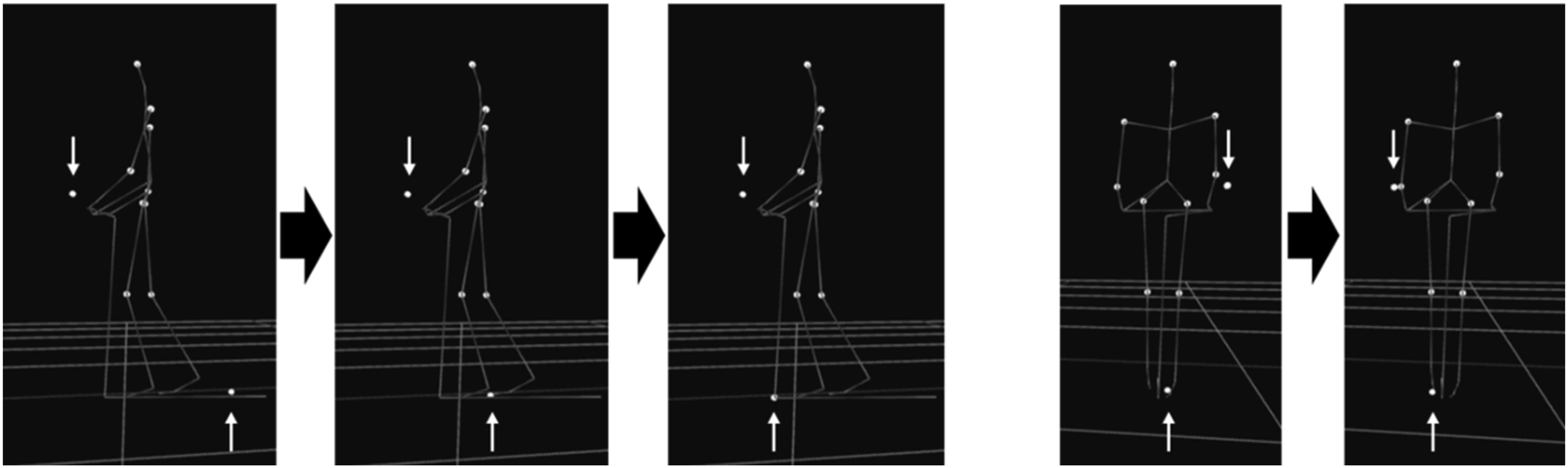
Moving point light (PL) representations were displayed as video clips beneath a layer of dots (called noise) that were also moving at various speeds and paths to make the recognition task more difficult, with parametric manipulation of noise levels. 5 target PL characters were used that represented (1) a running human, (2) a human riding an e-scooter, (3) a human riding an e-scooter with a pattern of moving/blinking lights meant to mimic biological motion (see Figure 5), (4) a human riding an e-scooter with an alternate lighting pattern (the motion pattern reversed, see Figure 6), and (5) a cube-like shape (“object”), as well as a final condition (6) no object present. Each character was represented with 13 white points. The points of the runner were articulated to represent the motion of a human. The points of the scooter riders and object were fixed relative to each other, except for the moving/blinking lights for two of the e-scooter variants. All other parameters and procedures were consistent with the design of Study 1. Further examples of the stimuli can be found in the supplemental materials. Frame captures of human riding e-scooter with light pattern consistent with biological motion for side profile (left three images) and forward-facing profile (right two images) without noise. Light position changes through time (forward motion footfall and contralateral hand and foot indication) are highlighted with arrows and figure point lights are connected in lines for demonstration. Frame captures of human riding e-scooter with reversed light pattern inconsistent with biological motion for side profile (left three images) and forward-facing profile (right two images) without noise. Light position changes through time (backward motion for footfall and ipsilateral hand and foot indication) are highlighted with arrows and figure point lights are connected in lines for demonstration.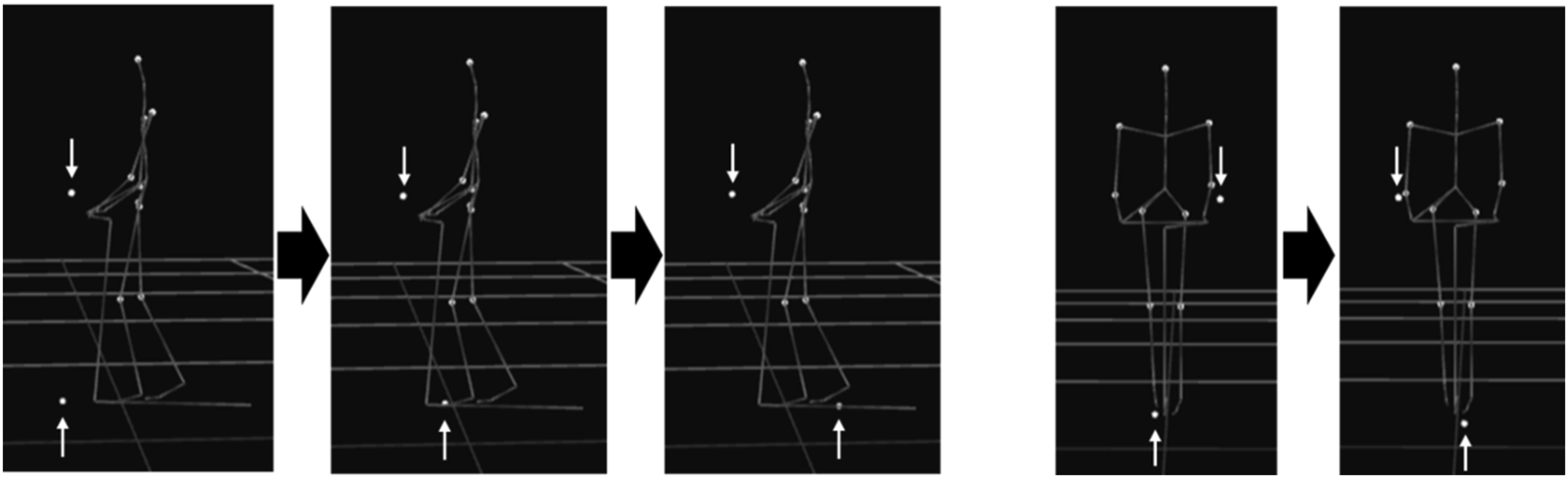
Measures and Analyses
For the second study, analyses were performed on the same measures as the first study, with repeated measures ANOVAs. The directions the PL figure traveled with respect to the viewer were averaged together across these analyses. A preliminary analysis examined the 11 participants that participated in both studies, examining Study 1 and Study 2 performance for each dependent variable to determine if there was an improvement for any of the shared character conditions. Afterward, the first analysis replicated and extended the analysis in the first study with 5 levels of Character (Runner, Scooter, Object, Scooter Biological Motion Consistent, and Scooter Reverse Motion) and 3 levels of Distractor (40k, 60k, and 80k).
Study 2 Results
Study 2 Descriptive Statistics.
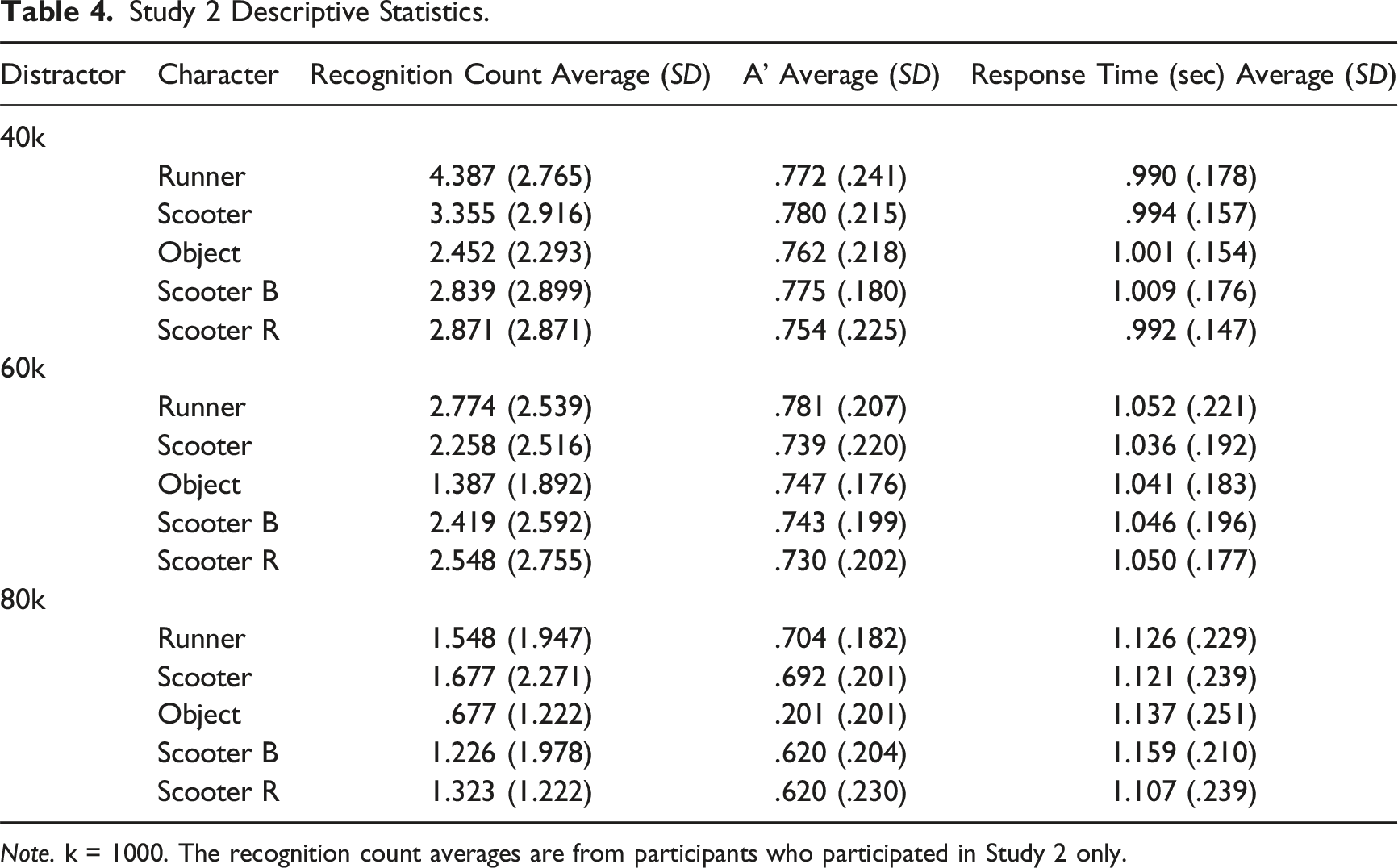
Note. k = 1000. The recognition count averages are from participants who participated in Study 2 only.
For A’, there was no Character by Distractor interaction, F (8,440) = 1.582, p = .128, ω 2 = .002. There was a main effect of Distractor, Huynh-Feldt corrected, F (1.563, 85.990) = 17.454, p < .001, ω 2 = .059. The 80k distractor condition was significantly different than the 40k distractor condition, t (55) = 4.544, p < .001 (Holm corrected), d = .525, and the 60k distractor condition, t (55) = 4.635, p < .001 (Holm corrected), d = .424. The 40k and 60k distractor conditions were not significantly different, t (55) = 1.433, p = .157 (Holm corrected), d = .100. There was a main effect of Character, Huynh-Feldt corrected, F (3.558, 195.711) = 4.541, p = .002, ω 2 = .008. The Runner condition had a significantly higher average detection accuracy compared to the Scooter Reverse Motion condition, t (55) = 3.427, p = .012 (Holm corrected), d = .244. The Scooter condition and the Scooter Reverse Motion conditions were marginal but not significantly different, t (55) = 2.752, p = .072 (Holm corrected), d = .171. The other conditions were not significantly different (ps > .12).
For recognition count, the following analysis excluded the 11 participants that were in both studies. There was a significant Character by Distractor interaction, Huynh-Feldt corrected, F (6.572, 197.167) = 2.445, p = .023, ω 2 = .009. Post-hoc analyses indicated that for the 40k distractor level, there were significant differences in recognition count between the Runner and Object conditions, t (30) = 3.420, p = .016 (Holm corrected), d = .808, the Runner and the Scooter Biological Motion Consistent conditions, t (30) = 3.625, p = .011 (Holm corrected), d = .646, and the Runner and the Scooter Reverse Motion condition, t (30) = 3.223, p = .024 (Holm corrected), d = .633. For the 40k condition, the Runner and Scooter conditions were not significantly different for recognition count, t (30) = 2.513, p = .123 (Holm corrected), d = .431, and the other conditions were not significantly different (ps > .57). For the 60k and 80k distractor levels, there were no significant differences in recognition count between character conditions (ps > .128). There was a main effect of Distractor, Huynh-Feldt corrected, F (1.625, 48.738) = 35.114, p < .001, ω 2 = .135. There was a significant difference for the 40k and 80k conditions, t (30) = 7.004, p < .001 (Holm corrected), d = .789, the 60k and 80k conditions, t (30) = 6.125, p < .001 (Holm corrected), d = .412, and the 40k and 60k conditions, t (30) = 3.890, p < .001 (Holm corrected), d = .377. There was a main effect of Character, Huynh-Feldt corrected, F (2.538, 76.138) = 5.009, p = .005, ω 2 = .035. There was a significant difference in recognition for Runner and Object conditions, t (30) = 3.381, p = .020 (Holm corrected), d = .583, whereas there were no significant differences between the other conditions (ps > .14).
For response time, there was no observed interaction between Distractor and Character, F (8, 368) = .570, p = .803, ω
2
= .000. There was a main effect of Distractor, Huynh-Feldt corrected, F (1.570, 72.209) = 25.045, p < .001, ω
2
= .085. There was a significant difference for the 40k and 60k conditions, t (46) = 3.277, p = .002 (Holm corrected), d = .242, the 40k and 80k conditions, t (46) = 5.645, p < .001 (Holm corrected), d = .668, and the 60k and 80k conditions, t (46) = 4.778, p < .001 (Holm corrected), d = .426. There was a no effect of Character F (4, 184) = 1.032, p = .392, ω
2
< .001). See Figure 7 for a comparison of the two studies for each dependent variable. Estimated marginal means for the Character condition for the first and second studies. Scooter B is the scooter condition with movement consistent with biological motion. Scooter R is the scooter condition with reverse movement, inconsistent with biological motion. Response time is in seconds. Error bars represent standard error (SE).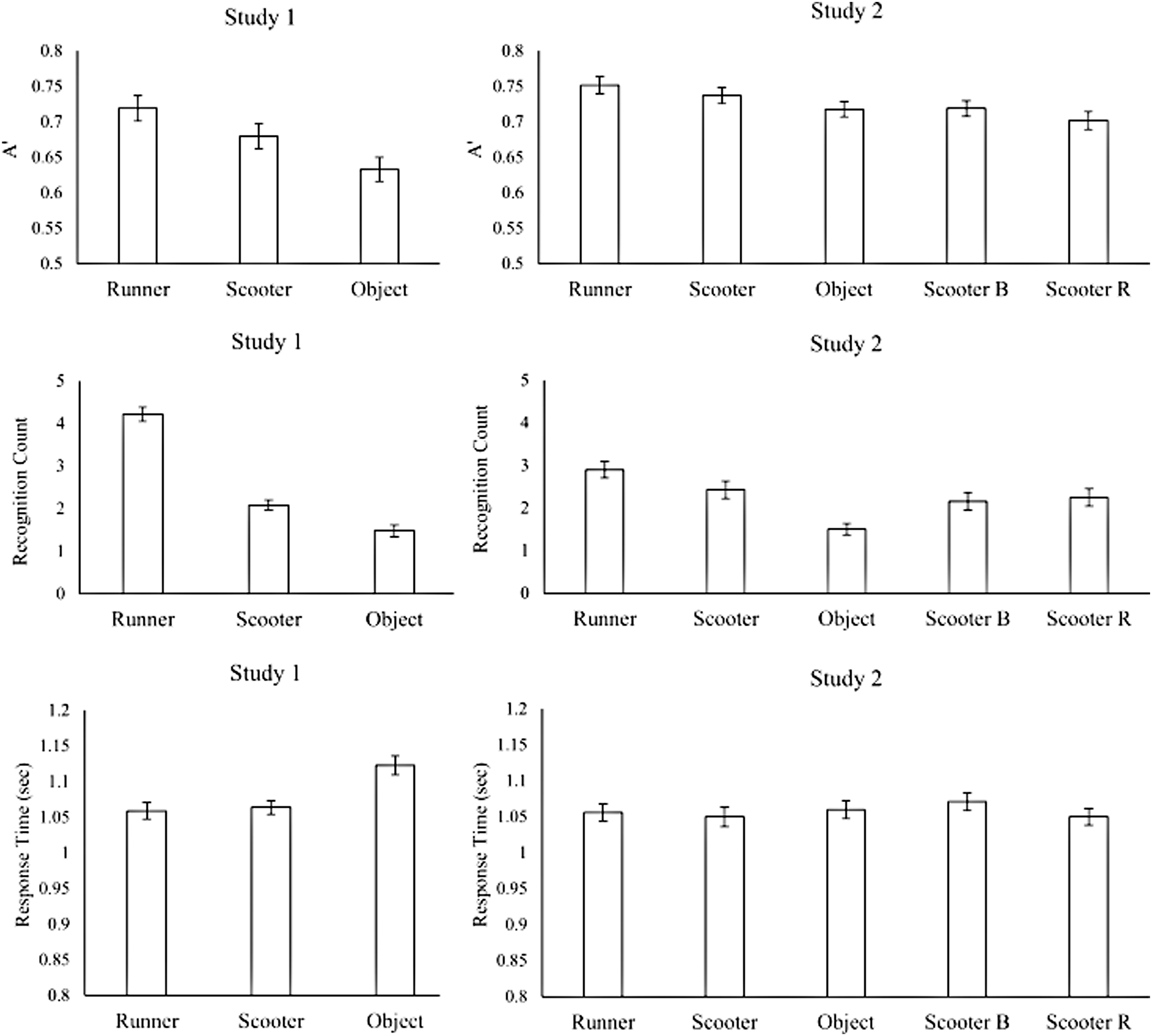
General Discussion
The emergence of e-scooter sharing companies in 2017 contributed to a pronounced increase in e-scooter-related injuries requiring emergency department attention, with counts of e-scooter related emergency room visits more than quintupling from 2014 to 2019 (Farley et al., 2020). E-scooters have a relatively high prevalence of injuries among users compared with other modes of transit (Tian et al., 2022), exhibiting significantly more injuries per vehicle miles traveled than motor vehicles (Rix et al., 2021). A major concern of e-scooter riders is collision with motor vehicles (Sievert et al., 2023). A significant body of work exists on biological motion and the influence it can have on improving safety by enhancing the detectability of pedestrians and cyclists by motor vehicle drivers (Owens et al., 1994; Edewaard et al., 2020). However, there is a lack of research regarding e-scooters and the effects the reduction of biological motion and other factors may have on the perception and conspicuity of e-scooter riders. This study examines this question and evaluates the detection, recognition, and response time of participants shown point light (PL) representations of runners and e-scooter riders.
For Study 1, the runner was detected in noise more frequently, detected more quickly, and more accurately identified than the e-scooter rider or object. In general, participant performance in the e-scooter figure condition was worse than in the runner condition, but better than in the object condition. For Study 2, the runner had superior detection performance compared to the reverse motion scooter condition, and the runner was more readily identified relative to the object and the two scooter motion conditions in specific distractor conditions. Altogether, these findings are partly consistent with the hypothesis that the diminished availability of biological motion cues produced by e-scooter riders may make it more difficult for people to perceive riders.
Research Implications
Although the results partially support the role of biological motion perception in explaining the differences between the PL runner condition and the other conditions, it is less clear why performance in the e-scooter condition was better than performance in the object condition in the first study. There was a significant difference in detection between the runner and scooter in Study 1 for A’, which was not replicated in Study 2. Removing the sway may have slightly improved the detectability of the scooter (Figure 7), suggesting that overall object motion does not account for the results in Study 1. Furthermore, introducing motion with the alternative scooter figures in Study 2 did not improve the detectability of those figures relative to the original scooter figure without internal motion. The human body configuration explanation, which argues for a configural form mechanism or form pathway for the biological motion advantage (Lange & Lappe, 2006), remains relatively convincing, as the scooter PL figure remains more detectable than the object in Study 1 and there were no observed differences between the modified scooter PL figure and the runner in Study 2.
However, this configural form or human body explanation cannot solely account for the detection advantage. Given that the human body is represented in all three scooter PL figures in Study 2, we would expect roughly equivalent performance between the three scooter conditions relative to the runner, which is not what was found. Introducing motion for part of the figure significantly reduced the detectability of the reverse motion scooter figure. Multiple mechanisms contribute to the perceptual advantages of biological motion, which is reasonable given the relatively wide distribution of brain regions involved (Chang et al., 2018). A configural form perception pathway via global analyses (Lange & Lappe, 2006; Shiffrar et al., 1997) and a local motion pathway for detecting biological motion exists (Bromfield & Gold, 2017; Chang & Troje, 2009; Troje & Westhoff, 2006). The local motion pathway for biological motion is most sensitive to locomoting limbs, specifically feet in the case of human locomotion (Bromfield & Gold, 2017). This arguably is an efficient way to identify biological organisms that may be a threat or may be beneficial (e.g., social partners) (Troje & Chang, 2023). Another possibility for the reverse motion disadvantage is the integration of conflicting configural form, temporal pattern, and local motion information in biological motion perception, as conflicting local and global cues can lead to worse performance (Thurman & Lu, 2013).
Practical implications
E-scooters can travel at speeds up to 18 mph and the relative absence of biological motion cues may contribute to a greater rate of collisions due to drivers not detecting the rider in time. Furthermore, while cities differ on their approach for managing e-scooter use, some municipalities have introduced regulation that e-scooter riders must use the street instead of the sidewalk to improve pedestrian safety and comfort (Jafari & Liu, 2024; Orozco-Fontalvo et al., 2023), which may contribute to a much greater proportion of motor vehicle-involved crashes and severe injuries requiring hospital treatment (Neuroth et al., 2022). Drivers must rely on other motion and distance cues which may be absent or impoverished in certain contexts (e.g., low light, precipitation, fatigue, and complex environments) increasing crash and serious injury risks to e-scooter riders.
Biological motion remains a viable explanation for the superior detectability of the runner character. One design implication of these findings is that mimicking biological motion through visual displays could be a useful way to better capture attention. Study 2 provided a preliminary test of biological motion visual displays with the alternative scooter figures. Introducing motion into part of the scooter figure in the distractor-laden PL display served to reduce overall detectability of the scooter figures, but the use of motion consistent with biological motion partially mitigated this reduction in detectability, given a significant difference between the runner figure and the reverse motion scooter figure, with no statistically significant difference between the biological motion consistent scooter figure with apparent motion consistent with biological motion and the runner figure in detectability. However, comparing roughly equivalent conditions that mostly differed on whether they possessed qualities consistent with biological motion (e.g., runner vs. nonsway scooter; biological motion consistent scooter vs. reverse motion scooter) found the range of effect sizes were all fairly small (d = .073 and d = .084, respectively, for A’).
For design recommendations, recent research has demonstrated that improving e-scooter visibility with by increasing color contrast improves e-scooter detection time by drivers (Komova et al., 2024); therefore, the presentation of organized flashing lights would likely have a large effect on detectability and conspicuity (Rumar, 1990). Motion onset is known to capture attention (Smith & Abrams, 2018), therefore using lighting in motion of any kind on an e-scooter would likely be beneficial for conspicuity for detection and collision avoidance. Given the design choice between a visual motion display with biological or nonbiological motion, the recommendation would be for one consistent with biological motion. This is particularly true if the design is expected to be produced at scale, as small effects can aggregate and have a practical effect at the community level (Matz et al., 2017).
Display space can be limited, as is the case for e-scooters, reducing the ability to communicate configural form (e.g., articulated limbs), which is a major pathway for perceiving biological motion. The scooter manipulations presented in the second study focused on the local motion pathway, which has the strongest association with locomoting limbs like feet (Troje & Chang, 2023). This may partly explain why a study of retroreflective materials on pedestrians at night found that highlighting ankles of pedestrians in motion had better detection than highlighting torsos of pedestrians in motion (Balk et al., 2008). This is why the manipulation focused on apparent motion along the lower body of the PL e-scooter similar to the motion of the PL runner’s feet. However, this local motion processing pathway primarily applies to locomoting limbs, not other limbs. For example, perception of hands may rely more on the form-based mechanism of biological perception (Bromfield & Gold, 2017).
Limitations and Future Work
The primary limitation of the present study is the inability to disentangle local biological motion effects from the contribution of human body configuration to perceptual performance. Secondly, the biological motion condition presents a runner instead of a walker, which better matches the figure conditions on their typical perceived speeds as e-scooters typically move at runner speeds (or faster). Another minor limitation is that participants provided verbal report for 20/20 visual acuity (corrected allowed), so it is plausible that some participants did not have 20/20 vision. Furthermore, participants were exposed to a significant number of runners and e-scooters in the absence of a secondary task, which is not like the typical encounter rate in the real driving environment as drivers are often performing secondary tasks. If participants have increased expectations to detect figures, this may improve their detection rate and response time and obscure the true magnitude of the differences in detection accuracy between pedestrians and e-scooter riders on the road.
The biological motion advantage of the PL runner only partly replicated in Study 2, with the primary indicator being a greater degree of recognition for the runner figure in the moderately difficult distractor condition (60k). One explanation is that biological motion perception is most effective at normal walking speeds (Lange & Lappe, 2006), and the stimuli presented here all presented runners traveling at speeds consistent with an e-scooter, reducing the reliability of the biological motion effect. Another explanation may be statistical power, given an increased number of character conditions in the second study. An examination of the effect sizes of the detection accuracy (A’) for Study 1 and Study 2 between the Runner and Object (Cohen’s d = .335, 95% CI [.152, .517], Cohen’s d = .166, 95% CI [–.064, .396] indicate reduced effect sizes for Study 2, indicating that the inability to find many significant differences for Study 2 was due to both reduced effect sizes and reduced statistical power given the increased number of character conditions. Relatedly, the calculation of the false alarm rate was influenced by the increased number of signal absent trials in Study 2 (40) compared to Study 1 (24), whereas the number of signal trials per character condition remained the same for both studies (8), to have a similar ratio of total signal to nonsignal trials across studies, which may have affected A′ calculation.
Another major limitation is that these studies present relatively simple PL displays in line with classic studies investigating biological motion, instead of more realistic visual environments that may mirror a crash or near-miss events in the real world, which limits the generalizability of the findings. This approach is consistent with use-inspired basic research, in which applied problems elicit investigation in controlled basic experiments before translation to practical settings (Stokes, 1997), like basic-to-applied research programs in collision detection (DeLucia, 2013) and vigilance (Warm et al., 2008). The logical next step for future studies is to utilize more realistic stimuli or use driving simulation to investigate whether these findings with PL displays transfer to real-world settings, whether biological motion has a significant impact in a simulator for e-scooters, and whether biological motion has a greater impact for detection of e-scooter riders in environments with deprived visual information (e.g., nighttime driving, see Wood et al., 2014; 2017).
Key Points
• E-scooter riders report a relatively high prevalence of injury, and collisions with motor vehicles can be severe. Existing research on the visual perception of biological motion shows that highlighting biological motion salience increases the conspicuity of pedestrians and cyclists. • Point light representations of a runner, e-scooter rider, and object were used to explore the relationship between the presence of biological motion and visual conspicuity. • In the first study, participants detected and recognized the runner significantly more than the e-scooter rider or object and exhibited faster reaction times. Performance differences were reduced between the e-scooter rider and runner in the second study. Of the e-scooter conditions, the e-scooter rider displaying motion patterns inconsistent with biological motion had the worst detection performance. • Findings were partly consistent with the hypothesis that e-scooter riders may be more difficult to visually detect by other road users due to the relative absence of local biological motion cues by riders. An alternative explanation is the higher detectability of human body configurations.
Supplemental Material
Supplemental Material - Examining Biological Motion as a Potential Factor in E-Scooter Conspicuity and Safety
Supplemental Material for Examining Biological Motion as a Potential Factor in E-Scooter Conspicuity and Safety by Marshall L. Mabry, Curtis M. Craig, Peter Easterlund, and Nichole L. Morris in Human Factors.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Funding for this study was provided by the National Science Foundation, CPS—Cyber-Physical Systems, Award Number 2038403 to Nichole L. Morris as Co-PI.
Data Availability Statement
Supplemental Material
Supplemental material for this article is available online.
Author Biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.