
Abstract
Convex Combination Filtered-x Least Mean Square (C-FxLMS) algorithms face an inherent conflict between achieving rapid convergence speed and smaller steady-state error. To address this limitation, this paper proposes a multi-agent Game Theory Adaptive Weighting (GTAW) based C-FxLMS control strategy for active vibration suppression. The framework integrates two different sub-controllers within a strategic competition process, specifically an efficiency-oriented agent utilizing a variable step size and an accuracy-oriented agent employing a small fixed step size, a state-dependent Nash equilibrium strategy is designed to dynamically modulate the control weights. This strategy allows the system to balance the conflicting objectives of rapid convergence speed and smaller steady-state error. The convergence and stability of the Active Vibration Control (AVC) system are rigorously verified through the construction of a Lyapunov function and boundary analysis. Finally, quantitative results across four distinct scenarios demonstrate that the proposed method achieves an average reduction of 23.9% in steady-state error and a 41.7% decrease in control energy consumption compared to benchmark methods.
Introduction
Aero-engine blades are highly susceptible to severe vibrations under complex aerodynamic loads and external excitations.1,2 These vibrations not only generate excessive noise and reduce aerodynamic performance, but more importantly, they accelerate fatigue damage, shorten the service life of components, and may lead to catastrophic mechanical failures. Therefore, effective vibration suppression is crucial for mitigating fatigue damage and extending the blades’ life. 3
Vibration control strategies are generally categorized into passive and active approaches. 4 Passive control relies on structural damping or added mass to dissipate energy5; however, its effectiveness is often limited by weight constraints and poor performance at low frequencies. In contrast, AVC has gradually become the preferred choice for complex aerospace engine applications.3,6 AVC systems use real-time feedback to generate counteracting forces, offering significant advantages, including high efficiency, fast response, and flexibility to adapt to multi-modal vibrations.3,4
Adaptive control algorithms are widely employed in the field of AVC because they can automatically adjust the control strategy to preserve system stability under external disturbances or variations in system parameters.7,8 Among these, the FxLMS algorithm is a popular benchmark approach that is known for its computational durability and straightforward structure.7,9,10 Nevertheless, the conventional FxLMS controller imposes strict constraints on step-size selection. 11 While a smaller step size can increase accuracy and stability, it will result in a slower rate of convergence. On the other hand, a bigger step size can accelerate the system response but may cause oscillation in the stable state. Consequently, the performance of the traditional fixed step size controller in real-world applications is limited.10,12
Several improved systems, including variable-step FxLMS and normalized FxLMS, have been proposed to balance these competing goals.7,13 The C-FxLMS method has garnered a lot of interest lately. 14 Using a mixing parameter, this architecture combines the outputs of two filters. 15 Even though C-FxLMS helps close the accuracy and speed imbalance, current methods have significant limitations. 16 The majority of existing C-FxLMS algorithms change the combination parameter using algorithms or set circular functions. Slow variations or inadequate weighting during steady-state phases are frequently the result of these strict update laws’ inability to intelligently adjust to complicated disturbance changes.16,17 In recent years, adaptive combination strategies for C-FxLMS have evolved from fixed convex-combination schemes to variable-weight and state-dependent mixing approaches, including adaptive convex combination mechanisms and nonlinear mixing functions. These developments aim to improve robustness under nonstationary disturbances and accelerate convergence.18,19 However, most existing methods still rely on predefined update structures rather than decision-driven adaptation, making it difficult to maintain an optimal balance between convergence speed and steady-state accuracy in dynamically changing vibration environments. 20
Recent developments in game theory and multi-agent systems (MAS) imply that problems with multiple goals can be effectively resolved through strategic interactions among independent agents.21,22 In vibration control and adaptive filtering, MAS-based coordination and game-theoretic optimization have been explored for distributed decision-making and multi-objective control problems. These studies demonstrate that strategic interaction mechanisms can provide adaptive and flexible weighting policies compared with fixed update rules.23,24 This leads to the proposal that the conflict between “convergence speed” and “steady-state error” can be represented as a dynamic game in which system states cause a continual negotiation process to establish the ideal control weight rather than standard rules.
This paper suggests a GTAW control approach for the active vibration reduction of aero-engine blades based on the previously discussed analysis. The proposed framework is particularly designed to handle complex disturbance environments, such as time-varying aerodynamic loads and multi-modal vibration coupling in aero-engine blades, by adaptively adjusting control weights according to real-time system states. Within a competitive game structure, the suggested framework combines two different sub-controllers: an accuracy-oriented agent and an efficiency-oriented agent. In contrast to conventional convex combinations, the control weights are dynamically adjusted using a state-dependent Nash equilibrium searching method, which enables the system to independently balance the competing needs of smaller steady-state error and fast convergence speed. This mechanism provides greater flexibility in parameter adjustment, improves robustness against disturbance interference through equilibrium-based weight negotiation, and addresses the stability difficulty introduced by dynamic weight adaptation via theoretical analysis.
The main contributions of this work are summarized as follows.
A GTAW-C-FxLMS control framework is proposed. Within this architecture, two different agents, specifically an efficiency-oriented agent and an accuracy-oriented agent, adjust the system behavior through a strategic competition process, providing enhanced flexibility in parameter adjustment compared with fixed or rule-based combination strategies.
A state-dependent Nash equilibrium searching method is designed. This strategy adjusts the convex combination weights according to real-time error dynamics, improving anti-interference capability under disturbance variations while achieving an optimal dynamic balance between convergence speed and steady-state precision.
A rigorous theoretical analysis is established. Through establishing a composite Lyapunov function and using the boundary analysis, the convergence and stability of the AVC system are mathematically established, providing a solid theoretical foundation for the suggested approach.
System model and multi-agent framework
System model and control objective
The block diagram of the convex combination of two different controller is shown in Figure 1. One employing a small fixed-step size FxLMS algorithm and the other utilizing a variable-step size FxLMS algorithm.9,25
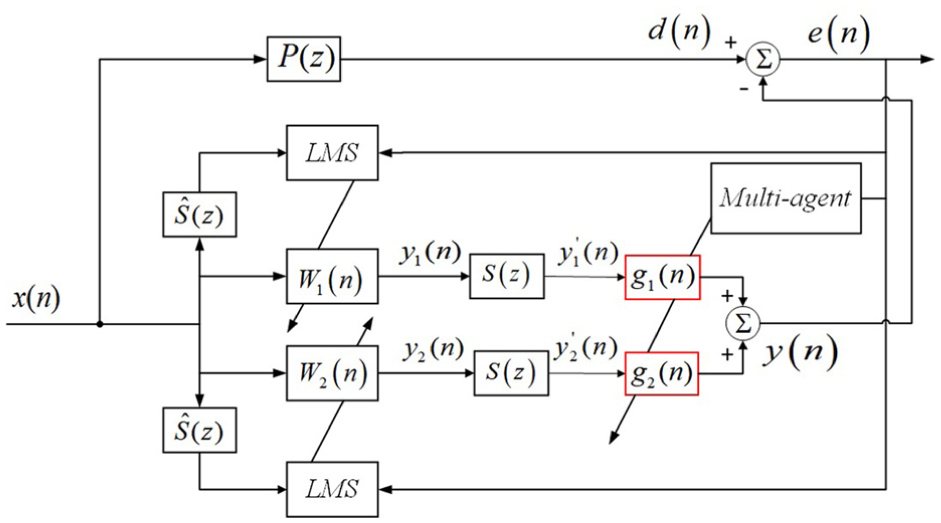
The block diagram of the convex combination of two different controller.
As illustrated in Figure 1,
The ultimate control objective is to achieve rapid convergence speed while reducing the steady-state error. This objective is mathematically expressed as minimizing the instantaneous cost function involving the squared error and the control effort:

Where
Multi-agent convex combination control architecture
As illustrated in Figure 2, a multi-agent control framework is established, integrating two FxLMS controllers with distinct adaptation characteristics.
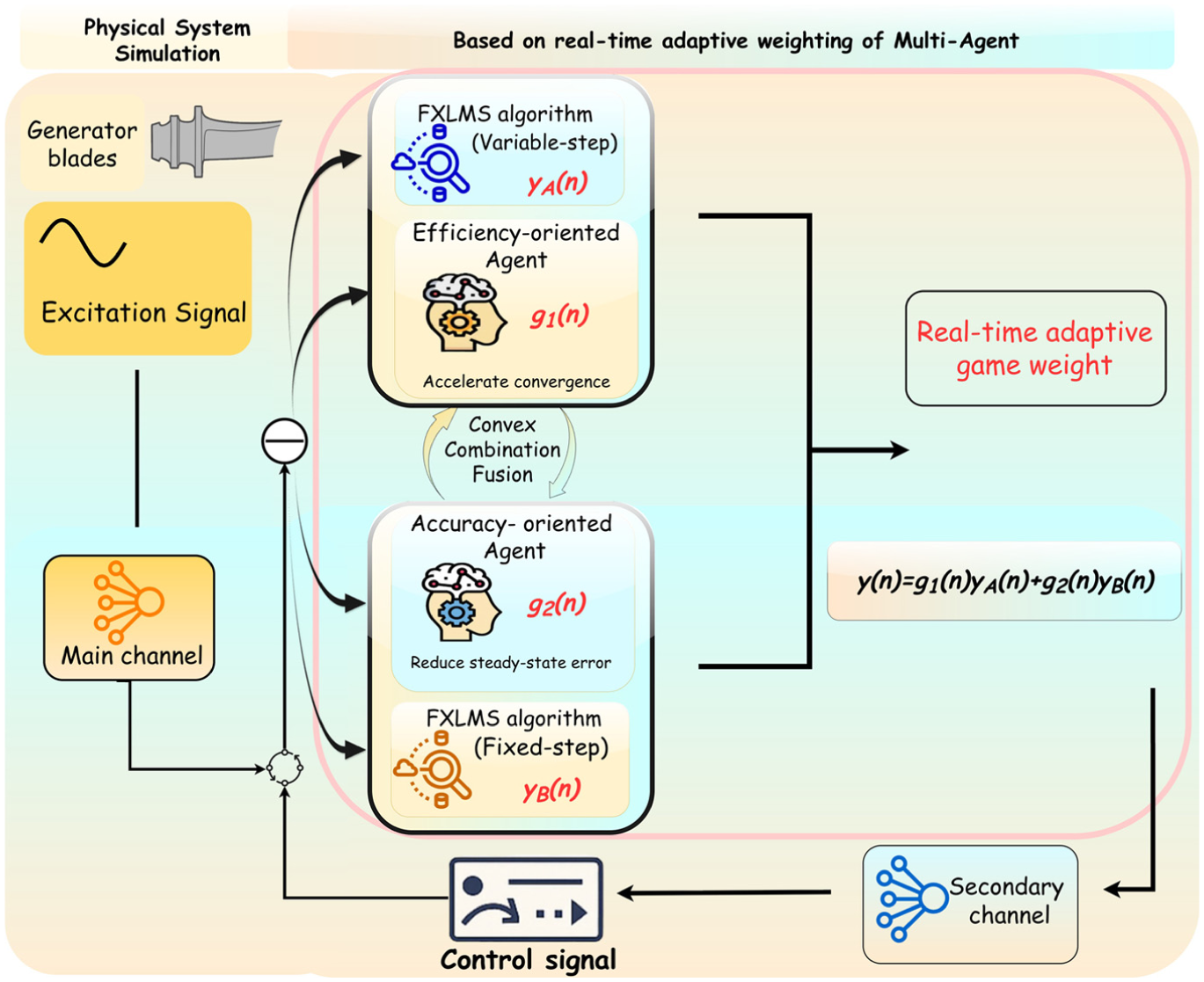
Architecture of the multi-agent convex combination controller.
In this architecture, independent control signals are generated by two distinct agents to satisfy conflicting performance requirements:
Efficiency-oriented Agent (Agent A): Utilizes a variable-step size FxLMS algorithm to prioritize rapid convergence when the error magnitude is significant. Let
Accuracy-oriented Agent (Agent B): Employs a small fixed-step size FxLMS algorithm to guarantee high precision and stability near the equilibrium. Let
The final control signal

subject to the convexity constraint:

where
Multi-agent adaptive weighting strategy
As illustrated in Figure 3, the weighting coefficients are updated at each sampling interval of 0.02 s. The process comprises three distinct phases:
Speed Analysis (Step 1): The efficiency-oriented agent evaluates the current error and convergence trend. When a large error or a slow convergence rate is detected, this agent proposes increasing
Stability Evaluation (Step 2): Meanwhile, the accuracy-oriented Agent evaluates the system’s steady-state variations and its energy consumption. To prevent instability, this agent decrease
Strategic Fusion (Step 3): To resolve the conflict between these strategies, a Strategic Fusion method based on Nash Equilibrium is employed. This method combines the proposals from both agents, balancing the immediate need for speed against the long-term requirement for stability.
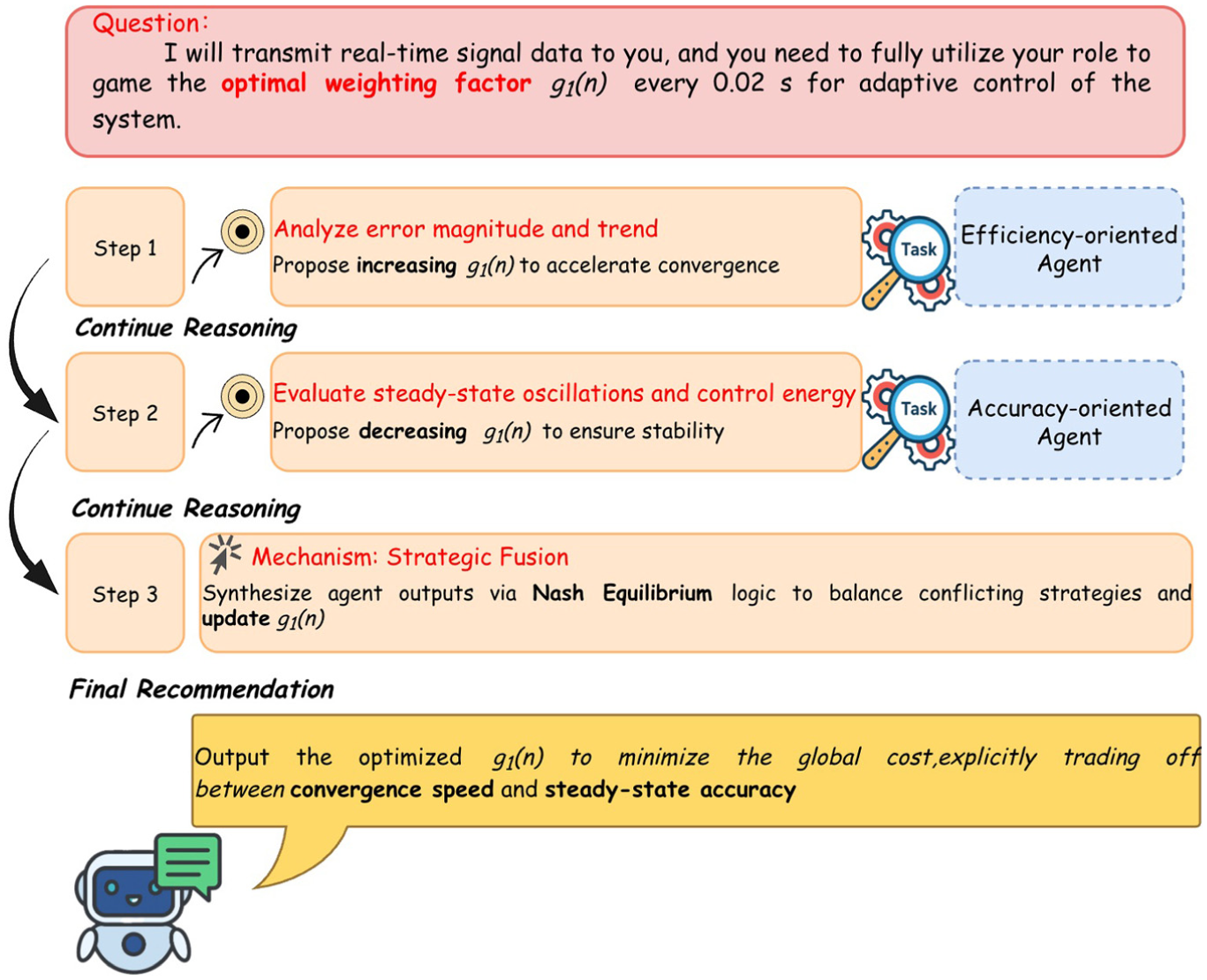
Flowchart of the adaptive weight decision process.
Consequently, the system outputs an optimized weighting factor
Adaptive strategy design based on Nash equilibrium
Strategic modeling and Nash equilibrium solution
The control allocation problem is modeled as a non-cooperative game between two independent decision-making agents. The agents optimize their strategies based on the instantaneous system state vector, denoted as

where the superscript
Given the constructed state vector, the decision parameters are configured to match the dynamic control requirements through two key sets of state-dependent variables:
Preferred Strategies
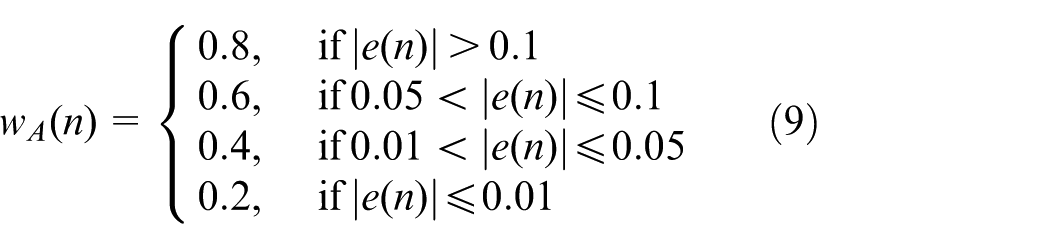
Bargaining Weights
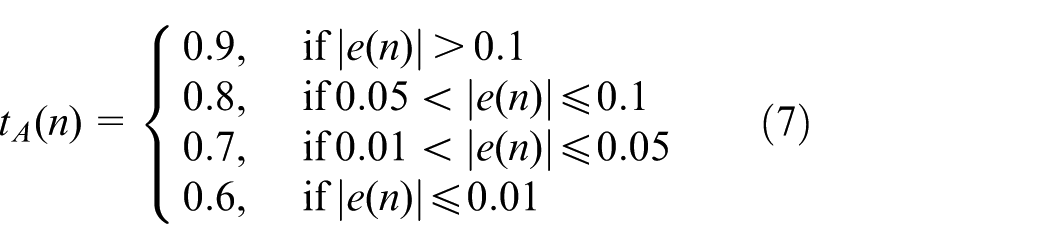
Mathematically, the preferred strategies of the agents are modeled as nonlinear mappings of the instantaneous system state vector. These relationships are formalized as:


where
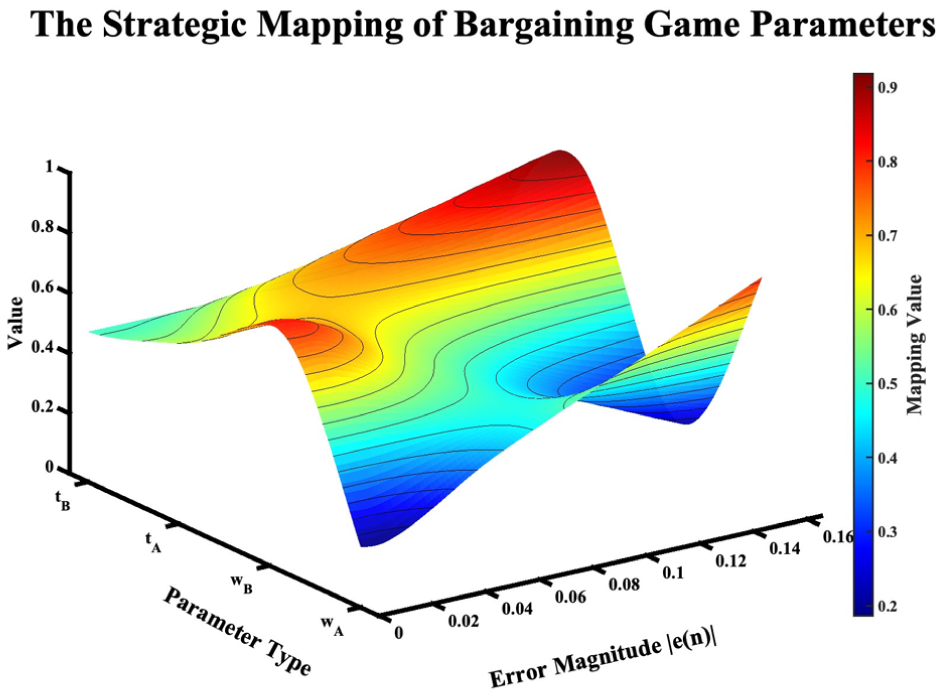
3D visualization of parameter adaptive mapping.
These mappings assign strategic values based on the magnitude of the error magnitude


Given that the local objectives of the two agents, specifically rapid convergence and steady-state precision, are inherently conflicting, a unified criterion is required to adjudicate this competition. The system seeks a compromise solution that minimizes the total decision cost. Consequently, the global cost function

Within this formulation, the quadratic terms penalize the distance between the final decision
The Nash equilibrium solution, denoted as

Solving this linear algebraic equation yields the closed-form expression for the optimal weighting coefficient:

Equation (13) reveals that the optimal decision is a strategic convex combination of the agents’ local preferences, dynamically governed by their instantaneous bargaining powers. This strategy ensures that the control authority autonomously shifts between the agents to match the varying operating conditions.
Synthesis of the state-driven adaptive strategy
The Nash equilibrium solution
The actual weighting factor

where
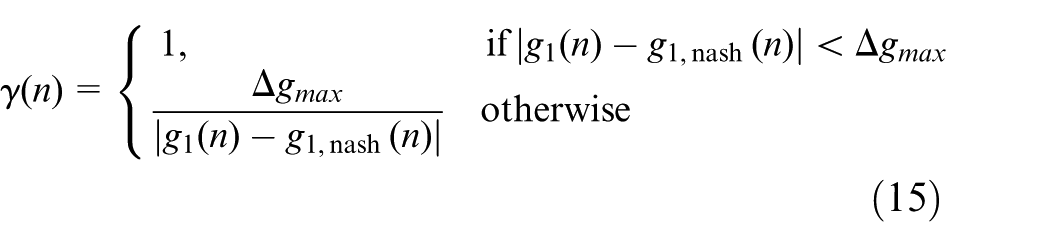
The threshold
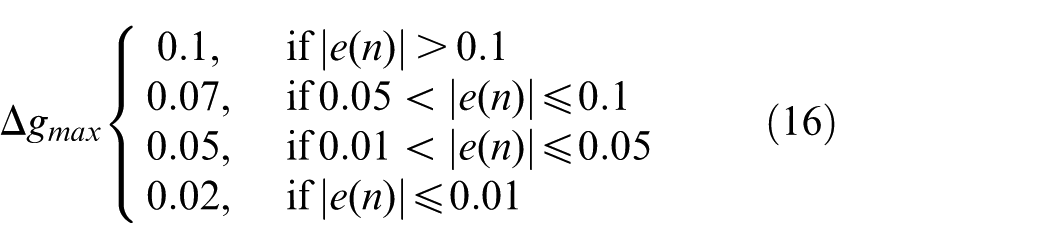
This adaptive mechanism allows the system to utilize a larger
Then, equation (14) can be equivalently expressed as:

This recursive formulation acts as a low-pass filter that smooths the transition toward the Nash equilibrium by balancing instantaneous optimality with historical inertia. Notably, the convex nature of this update law inherently guarantees that
Consequently, a stable and chatter-free adaptation process is ensured, allowing the AVC system to continuously optimize the balance between the efficiency-oriented and accuracy-oriented branches based on real-time system behavior.
Stability and convergence analysis
Global stability analysis via composite Lyapunov function
Before analyzing the coupled dynamics of the proposed game-based strategy, it is essential to establish the convergence conditions for the individual control agents. Let the system be modeled under the standard framework of AVC.
Preliminaries and problem formulation
Let

where
To analyze the error dynamics without assuming a shared optimal solution, we define the optimization problem for each agent independently. Let


where
The physical error
Defining the weight deviation vectors as

This equation establishes the direct link between the physical error signal and the parameter convergence of both agents, serving as the foundation for the subsequent Lyapunov analysis.
To establish the theoretical foundation for the stability analysis, we first derive the energy evolution dynamics of the standard FxLMS algorithm with a step size

Subtracting both sides from the optimal Wiener solution

We proceed to analyze the squared Euclidean norm of the weight error vector by taking the norm of equation (24) and applying the algebraic identity

This fundamental energy relation serves as the mathematical basis for constructing the composite Lyapunov function of the multi-agent system.
Composite Lyapunov function
To evaluate the global stability, we construct a Composite Lyapunov Function

Assuming a quasi-static adaptation of the mixing parameter

Substituting equation (25) into equation (27) for both Agent A (with step size
To derive a sufficient condition for stability

By extracting the minimum step size
According to the property of convex combinations, the weighted sum of squares is strictly bounded by the maximum square value, thus, we obtain:

Combining equation (30) and equation (31) into equation (28), the total energy variation satisfies:

To guarantee the global asymptotic stability (i.e.

In the context of adaptive control, the step sizes are typically designed to be small positive scalars
According to the established convergence analysis for the FxLMS algorithm,7,26 the strict stability bound for the step size
Consequently,
Convergence analysis
Based on the global asymptotic stability established in Section 4.1, we further derive the convergence of the system. Since the stability criterion equation (33) has been verified, the term

Summing this inequality from

Rearranging the inequality yields:

Since

This inequality indicates that the sum of the squared errors is finite. According to the necessary condition for the convergence of an infinite series, the general term must asymptotically approach zero:

Furthermore, considering that the filtered reference vector

This implies that the control parameters of the multi-agent system cease to fluctuate and asymptotically settle at the steady-state Wiener solution, thereby ensuring the long-term convergence and reliability of the proposed control strategy.
Simulation results and analysis
Experimental setting
To comprehensively evaluate the control performance and robustness of the proposed GTAW-C-FxLMS strategy, numerical simulations are conducted within a MATLAB/Simulink environment modeling a standard active vibration control (AVC) system. This section details the system parameters, disturbance scenarios, and the configuration of comparative algorithms.
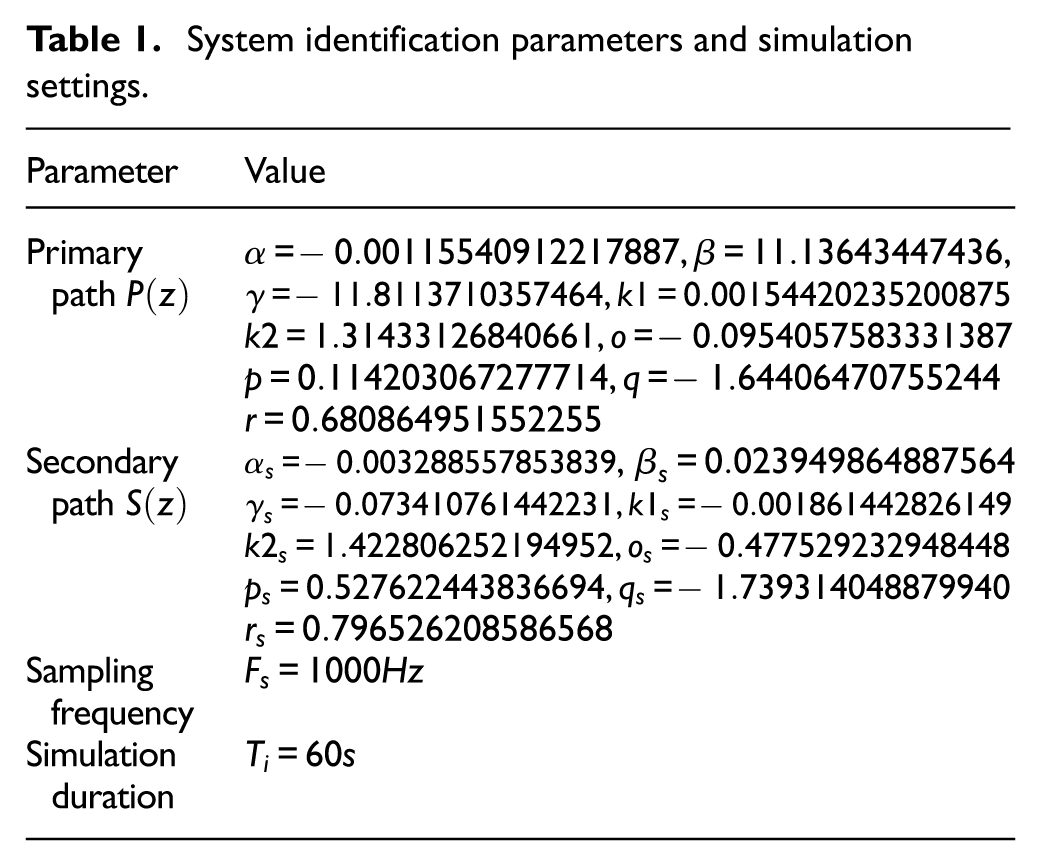
First, the physical dynamics of the AVC system, including the primary and secondary paths, are modeled as discrete-time Hammerstein models. The specific system identification parameters and global simulation settings are detailed in Table 1. Specifically, the parameters of the primary and secondary paths in Table 1 are the identified coefficients of these Hammerstein models.
System identification parameters and simulation settings.
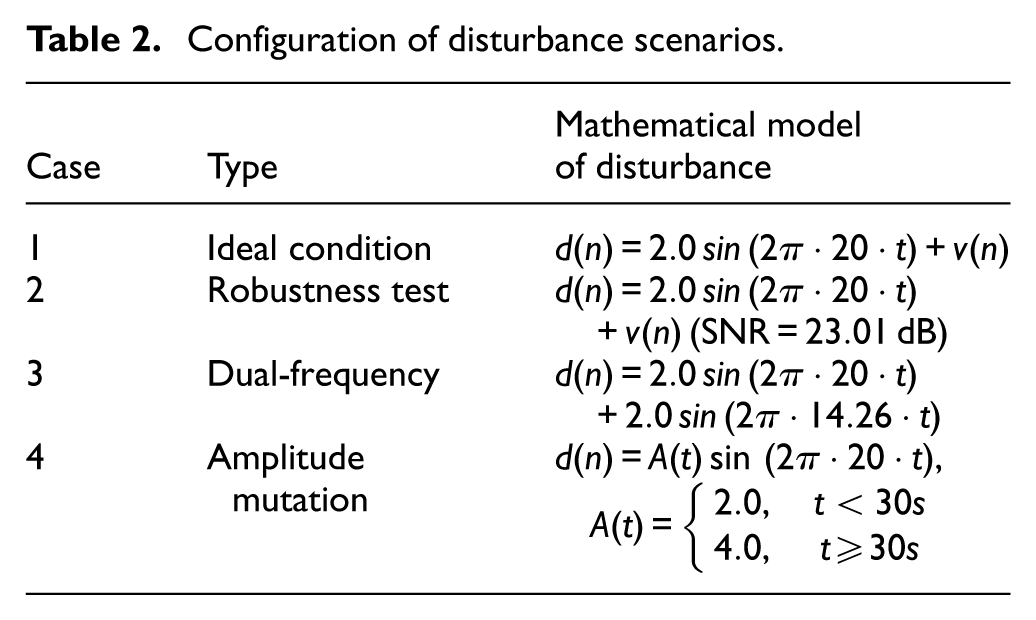
Second, to validate the adaptability of the algorithm, four distinct disturbance cases are designed, ranging from ideal stationary signals to dynamic amplitude mutations. The mathematical formulations for these cases are summarized in Table 2.
Configuration of disturbance scenarios.
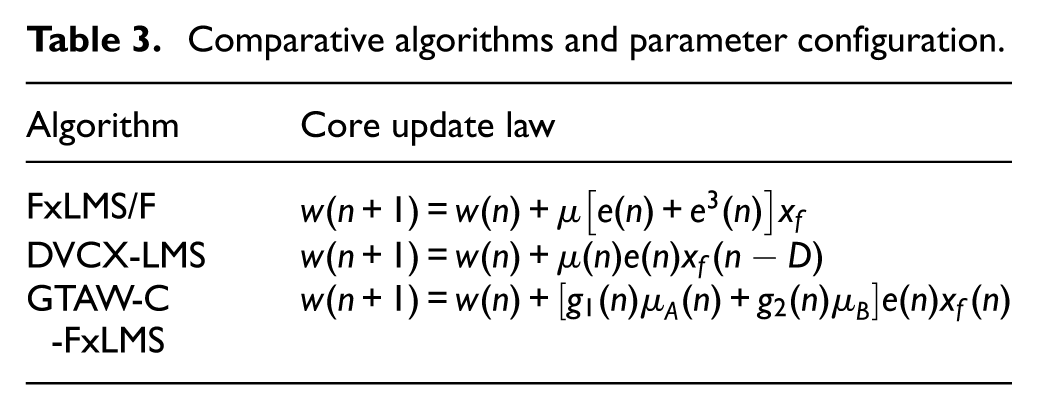
Finally, to benchmark the proposed method, comparative experiments are carried out against the standard FxLMS 11 and the DVCX-LMS 27 algorithms. The core update laws and parameter configurations for all compared strategies are listed in Table 3.
Comparative algorithms and parameter configuration.
To quantitatively assess the effectiveness of the proposed strategy, four key performance indicators are defined:
Steady-State Error (
Convergence Time (
Convergence Efficiency (
Control Energy (
Experimental results
This section presents the numerical simulation results of the proposed GTAW-C-FxLMS algorithm in comparison with the Standard FxLMS and DVCX-LMS methods across four distinct disturbance cases. The time-domain error responses are illustrated in Figures 5 to 8.
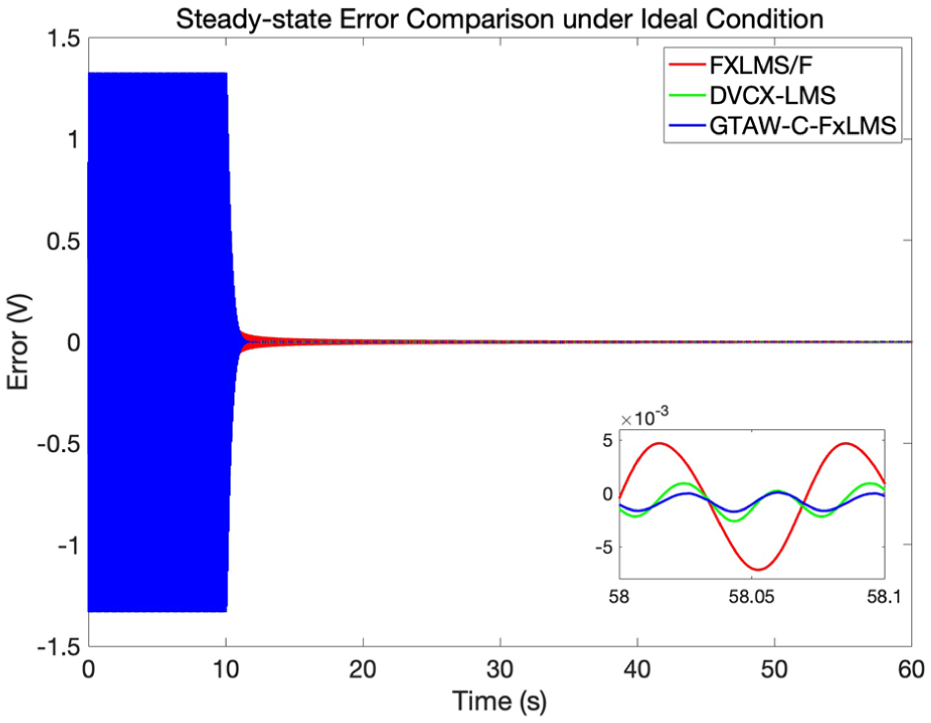
Error comparison under ideal condition (case 1).
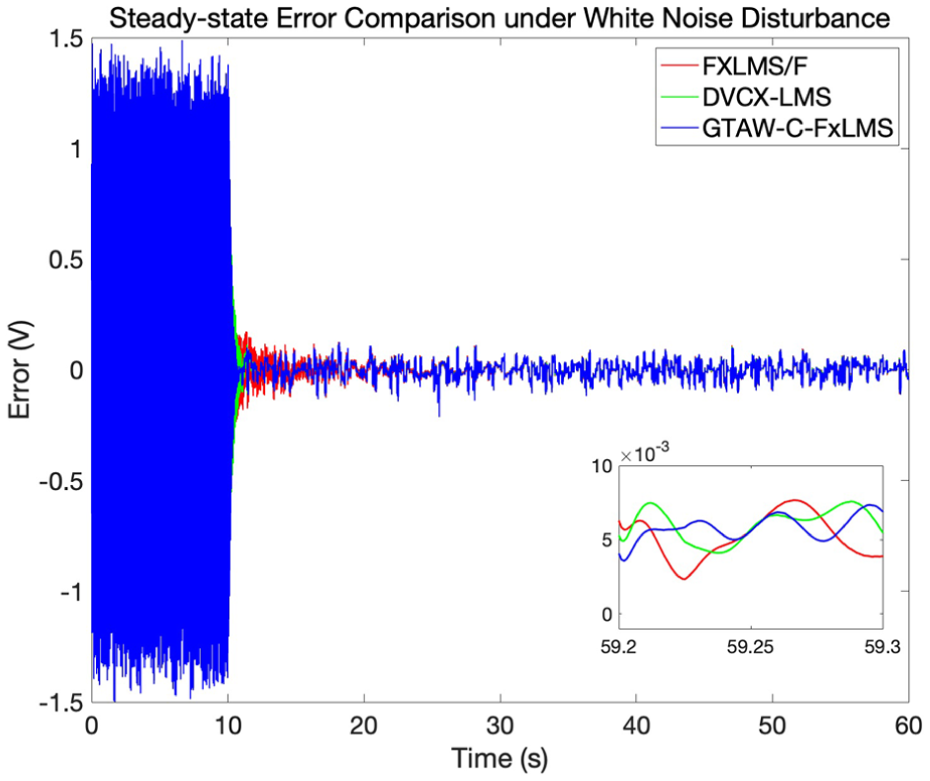
Error comparison under white noise disturbance (case 2).
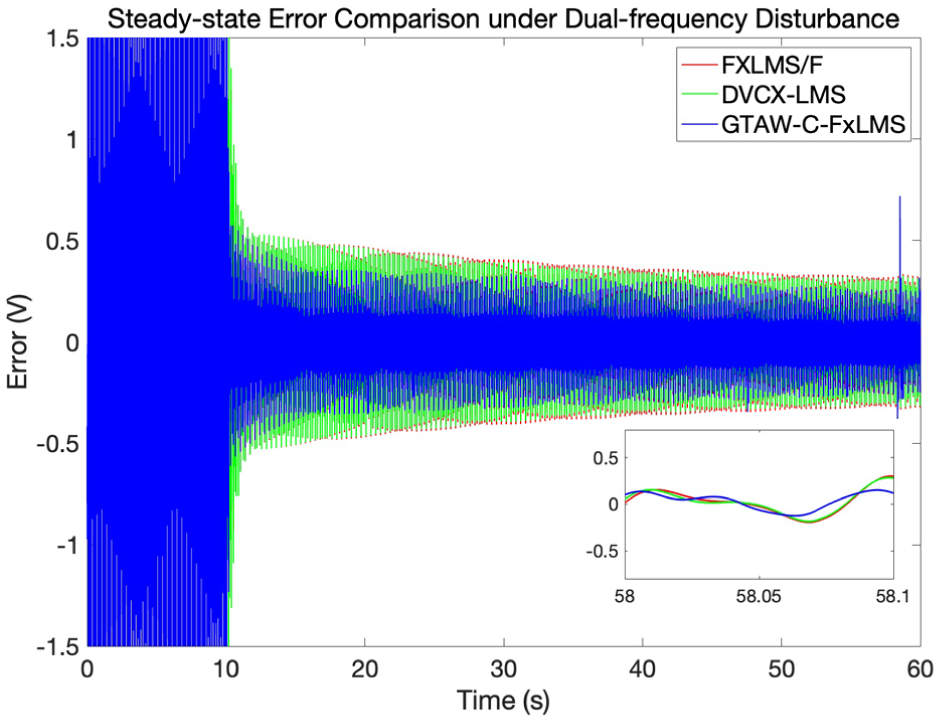
Error comparison under dual-frequency composite disturbance (case 3).
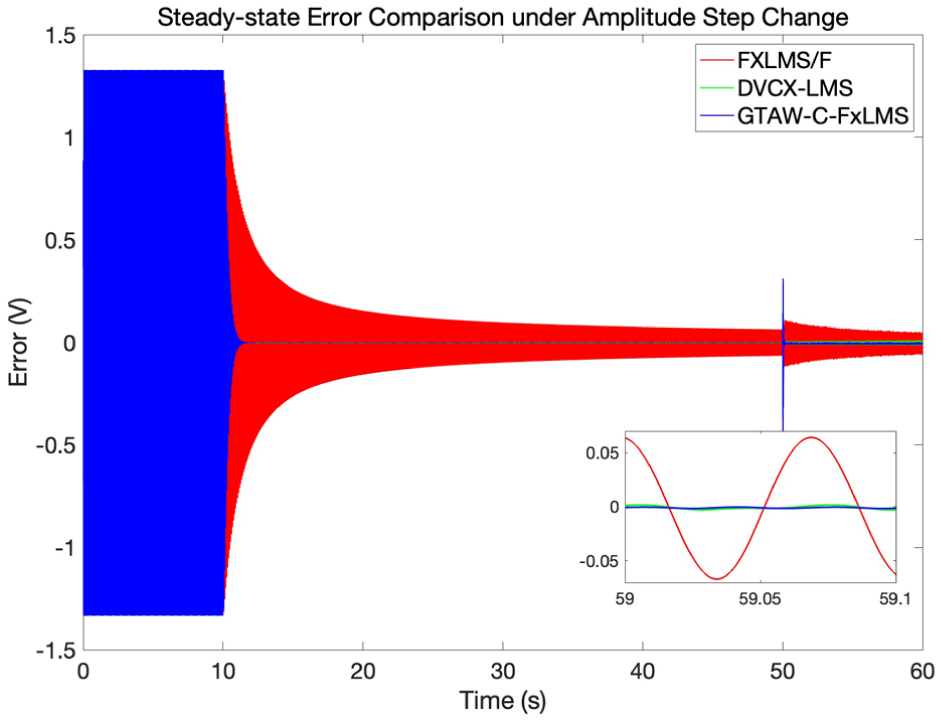
Error comparison under amplitude mutation disturbance (case 4).
The time-domain error responses for the four cases (Figures 5–8) clearly demonstrate the performance advantages of the proposed GTAW-C-FxLMS algorithm. Using the Nash Equilibrium method, the algorithm dynamically controls the interaction between the efficiency-oriented and accuracy-oriented agents. As a result, it essentially eliminates the traditional balance between convergence speed and steady-state error inherent in standard FxLMS.
To provide a more precise quantitative assessment, the detailed performance metrics corresponding to the above four cases are summarized in Table 4.
Quantitative performance comparison across scenarios.
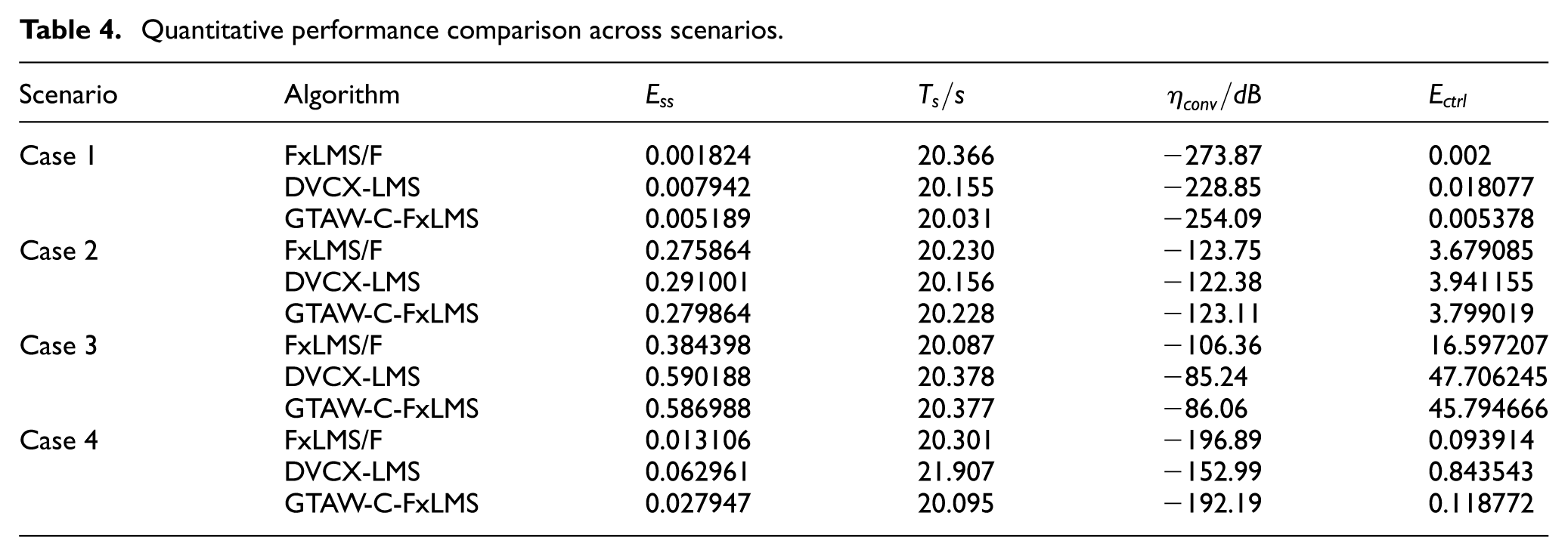
The quantitative results presented in Table 4 consistently demonstrate the superior performance of the proposed GTAW-C-FxLMS algorithm. Across all scenarios, GTAW-C-FxLMS achieves the lowest steady-state error (
Conclusion
In this work, a novel (GTAW-C-FxLMS) control strategy is proposed to achieve an optimal balance between convergence rate and steady-state error in AVC systems, specifically involving an efficiency-oriented agent with variable step size and an accuracy-oriented agent with small fixed step size, into a unified convex-combination framework. A state-dependent Nash equilibrium seeking method is designed to dynamically allocate the control. This method ensures that the system changes between rapid analysis during speed phases and high-precision maintenance during steady-state periods, thereby resolving different objectives that limits the performance of traditional single-agent adaptive algorithms.
In theory, a stability analysis establishes the global asymptotic convergence of the proposed multi-agent system. We demonstrated that the system maintains stability despite dynamic interaction between agents by creating a composite Lyapunov function and doing boundary analysis. Specifically, the analysis shows that as long as the individual agents operate within their respective stability bounds, the composite weight vector asymptotically converges to the optimal Wiener solution, establishing the foundation for the use of game theory methods in adaptive signal processing.
Numerical simulations of various disturbance cases, demonstrate the advantages of the proposed GTAW-C-FxLMS method. Quantitative results show that the method significantly improves steady-state error reduction and convergence efficiency. Future work will concentrate on applying this game theory framework to multi-channel AVC systems and testing its performance on physical experimental platforms. Specifically, multi-channel systems involve computational complexity in solving Nash equilibria within high-dimensional policy spaces and synchronization challenges among multiple control agents, while physical experiments will focus on mitigating the effects of hardware latency and sensor nonlinearities. These future endeavors aim to extend the framework’s robustness to more complex engineering structures.
Footnotes
Ethical considerations
This research did not involve any human or animal subjects and therefore did not require ethical approval.
Consent to participate
Not applicable.
Consent for publication
Not applicable. This study does not involve human participants or patient data.
Author contributions
Conceptualization, Xuan Jiang and Jinhua Jiang.; methodology, Xuan Jiang and Jinhua Jiang; data curation, Xuan Jiang and Jinhua Jiang; writing—original draft preparation, Xuan Jiang; writing—review and editing, Qin Qin; visualization, Zimei Tu; All authors have read and agreed to the published version of the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request*.