
Abstract
Soft tissues are complex anisotropic composite systems comprising of multiple differently oriented layers of fiber embedded within a soft matrix. To date, soft tissues have been mainly characterized using simplified linear elastic material models, isotropic viscoelastic and hyperelastic models, and transversely isotropic models. In such models, the effect of fiber volume fraction (FVF), fiber orientation, and fiber-matrix interactions are missing, inhibiting accurate characterization of anisotropic tissue properties. The current work addresses this literature gap with the development of a novel soft composite based material framework to model tissue anisotropy. In this model, the fiber and matrix are considered as separate hyperelastic materials, and fiber-matrix interaction is modeled using multiplicative decomposition of the deformation gradient. The effect of the individual contribution of the fibers and matrix are introduced into the numerical framework for a single soft composite layer, and fiber orientation effects are incorporated into the strain energy functions. Also, strain energy formulations are developed for multiple soft composite layers with varying fiber orientations and contributions, describing the biomechanical behavior of an entire anisotropic tissue block. Stress-strain relationships were derived from the strain energy equations for a uniaxial mechanical test condition. To validate the model parameters, experimental models of soft composites tested under uniaxial tension were characterized using the novel anisotropic hyperelastic model (R2 = 0.983). To date, such a robust anisotropic hyperelastic composite framework has not been developed, which would be indispensable for experimental characterization of tissues and for improving the fidelity of computational biological models in future.
Introduction
Soft tissues such as the skin, skeletal muscles, connective tissues, and tissues forming organs (such as the brain and myocardial tissues) are typically inhomogeneous1,2 and exhibit regional and directional anisotropy in three dimensions.3–5 Figure 1 shows a schematic of the various components of a soft tissue. Tissue anisotropy is mainly attributed to the variations in distribution of collagen fibers 2 from one site of the body to another. In the past, collagen fiber distribution in human cadavers and animal models were studied using dissection and histological investigations.6,7 Advancement in the imaging techniques in the recent years have allowed to look at fiber distributions in the human body using Diffusion Tensor Magnetic Resonance Imaging (DT-MRI) and confocal imaging. 8 In literature, there have been very few attempts to model tissue anisotropy in Finite Element (FE) models involving organs.1,3,9–14 Most other FE and experimental models so far have used isotropic and transversely isotropic hyperelastic models for tissue material characterization.
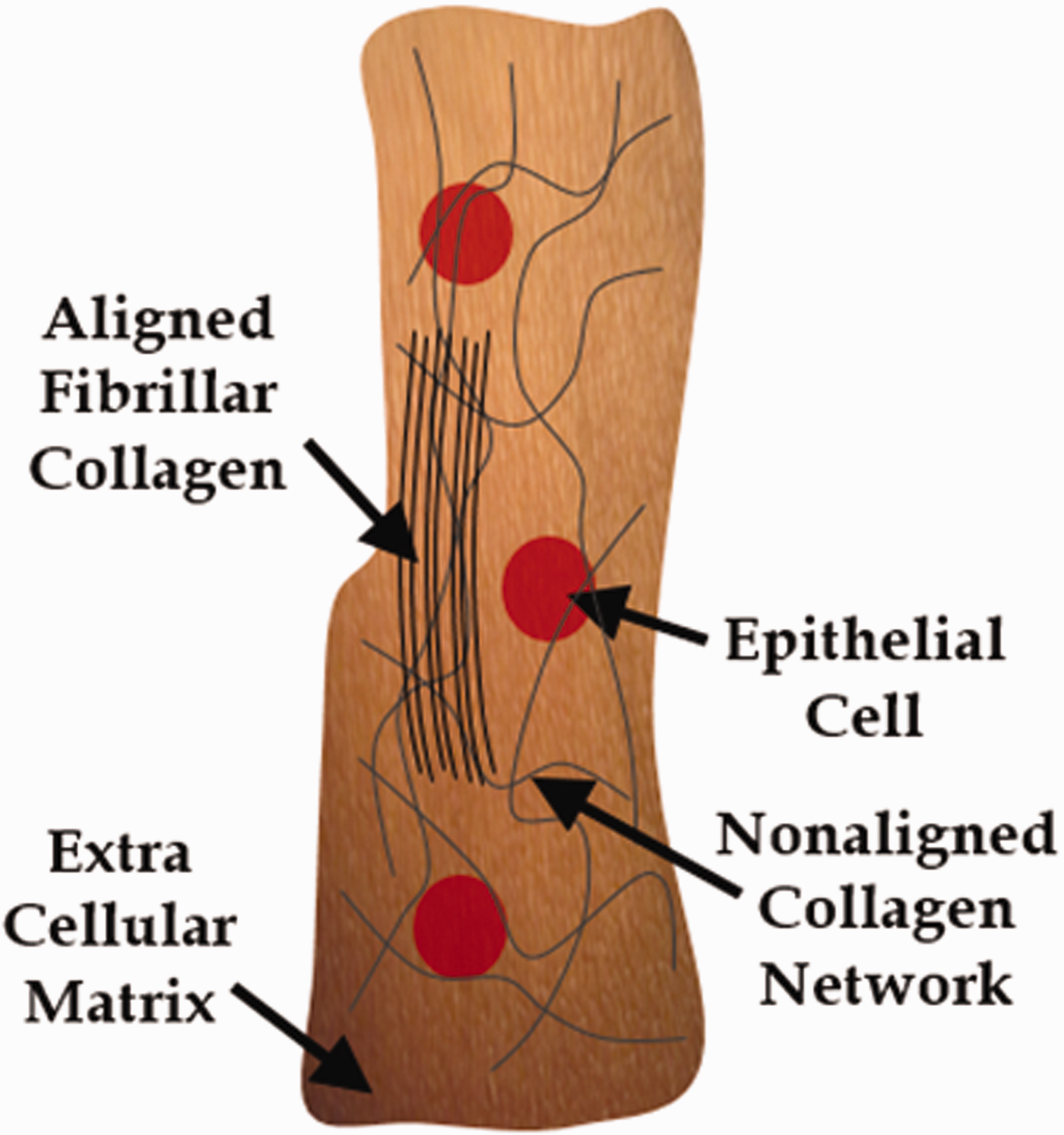
Schematic of the various components of a soft tissue.
The material behavior of an isotropic soft material (Figure 2(a)) is characterized using the strain-energy function (


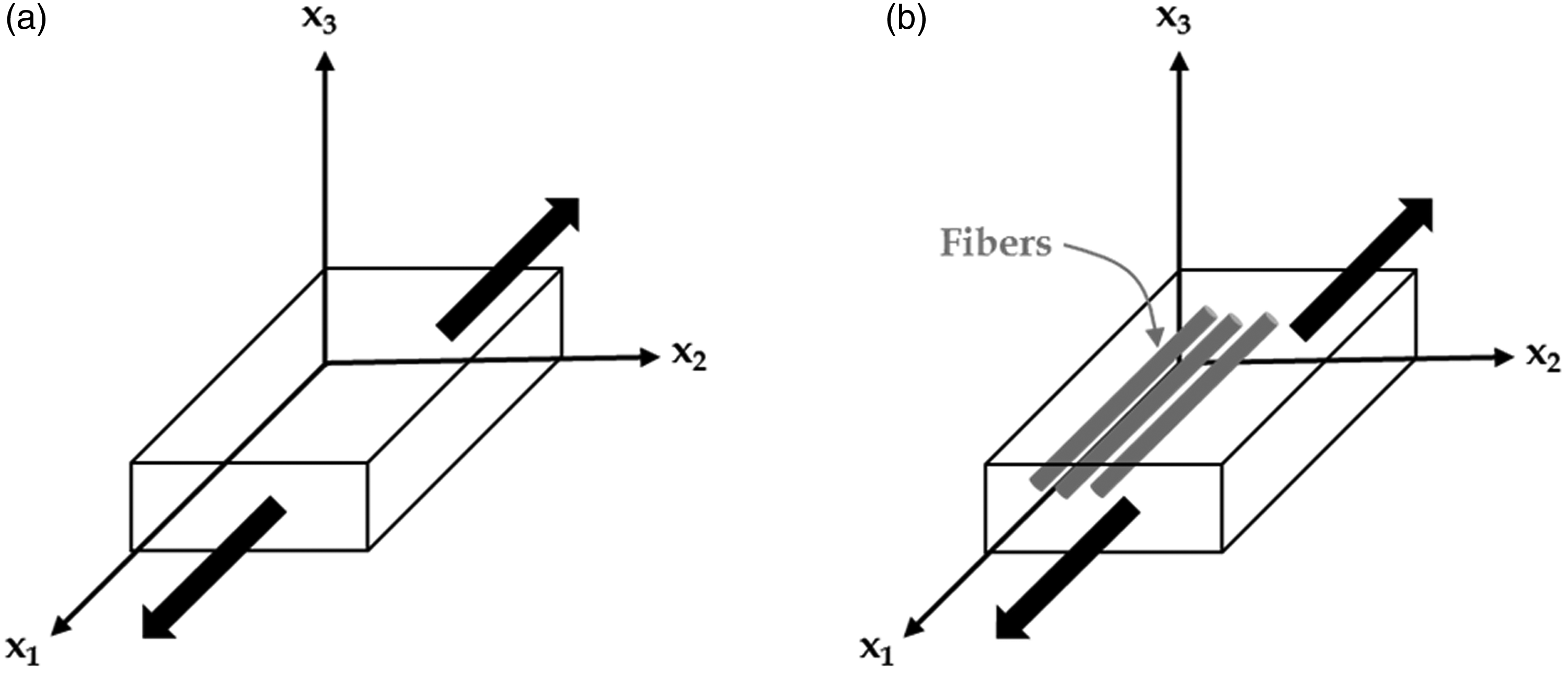
Schematic of soft composite stretching in: (a) Isotropic hyperelastic model and (b) transversely-Isotropic hyperelastic model.
Mooney-Rivlin model is the first hyperelastic material model developed, which was successful in precise polynomial curve fitting of mechanical stress-strain test data obtained for non-linear isotropic rubber-like materials. Equation (3) presents this model, where the applied stress in a uniaxial test is in terms of ‘


Neo-Hookean model (equation (5)), is a primitive form of hyperelastic model similar to the Hooke’s law, developed in the year 1948 to study the mechanical properties of vulcanized rubber. It has been observed to be accurate for strains less than 20% and fail in predicting material behavior under biaxial stresses. Neo-Hookean model has been superseded by Mooney-Rivlin model in accuracy of prediction, however it is still been used to predict non-linear soft tissue behavior.
28
Ogden model (equation (6)) predicts the mechanical properties for incompressible, isotropic and stress rate independent rubber-like materials more accurately than Mooney-Rivlin model and is also stable at high strains, and has been used often to characterize biological tissues.20,29–34

Humphrey and Yin in 198735,36 developed a composite based material model for myocardial soft tissues. The soft tissue was assumed to be made of various families of non-interacting fibers and a homogeneous matrix, both of which were assumed to undergo gross deformation. A pseudo-strain energy function was proposed which depends on limited structural information, and both on the matrix and fiber contribution information, which were obtained through multiaxial stress-strain experiments. Humphrey and Yin’s model (equation (7)), which is an exponential function with two material constants, was able to accurately predict anisotropic, incompressible and non-linear behavior of soft tissues.37–42

Martin’s hyperelastic model15,43 was introduced recently as a modified form of the transversely isotropic (Figure 2(b)) and incompressible hyperelastic model by Humphrey and Yin. An extra term signifying the passive strain energy stored in the muscle fibers due to the uniaxial experiments, was added to the overall strain energy expression. The resulting stress-strain relationship given by equation (8) was able to predict soft tissue material behavior, and was subsequently used by Martins et al. to predict the non-linear behavior of pelvic tissues.43–50 Veronda-Westmann model
51
(equation (9)) is another composite based model like Humphrey and Yin’s model, in which the energy density function depends on the contribution of the fibers and the matrix material. This model was developed based on experimental testing on cat’s skin, and has been used to predict the material behavior of liver, breast tissues and silicon rubber phantoms.27,52–55


To date, the isotropic hyperelastic models are able to model the gross mechanical properties of a soft tissue, and does not consider the effect of fibers. The transversely-isotropic hyperelastic material models consider the effect of fibers, and in some cases the fiber contribution. However, most of such models lack the consideration of fiber-matrix interactions, fiber orientations and distributions in layers. In this work, a novel soft composite based hyperelastic material model was developed which considers a soft tissue as an arrangement of several differently oriented fiber family layers within a matrix material. This model considers the individual fiber and matrix contributions in each layer, the effect of varying fiber orientations across layers, and the fiber-matrix interactions. The next section discusses the soft composite hyperelastic model development. Then, the validation of the model against the mechanical properties of soft composite materials developed in literature is presented, which is followed by conclusions in the final section.
Anisotropic hyperelastic model
Numerical model
To include the anisotropic effect of fiber inclusions in a matrix (soft composite model) with all fibers organized initially in the direction of vector
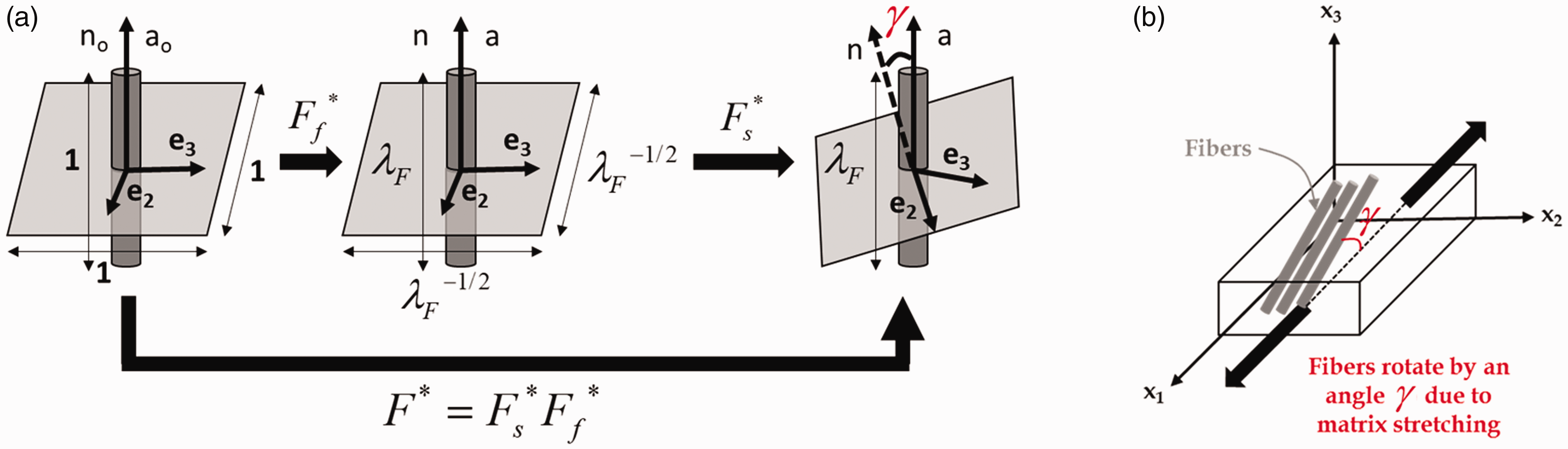
(a) Schematic of fiber rotation due to soft composite deformation and (b) overall soft composite stretching due to fiber-matrix interaction, in the novel soft composite based anisotropic hyperelastic model formulation
Considering initial fiber direction
The deformation gradient
By suitable choice of

Modeling the effect of fiber and matrix contributions
Soft tissues have been studied extensively in literature and have been found to exhibit a wide range of stress-strain behavior due to differences in collagen fiber content and fiber distribution.15,52,57 The highest collagen fiber content have been observed in connective tissues making them significantly stronger than other tissues.
60
Additionally, due to diseases such as Pelvic Organ Prolapse (POP), soft (pelvic) tissue changes have been attributed to collagen fiber variations.
3
To model the effect of individual fiber and matrix contribution on a soft composite material property, the matrix volume fraction (MVF)

On application of shear deformation

The energy stored during deformation

Now strain energy function for the anisotropic composite model is sum of the strain energies of the two steps (equations (13) and (15)), which is given by equation (16).42,56–59 In equation (16),

For Humphrey model fibers and matrix definitions, the modified strain energy functions and the net strain energy functions are given by equations (17) and (18) respectively.
15


In equations (16) and (18), the term


The principal Cauchy stress for a given hyperelastic strain energy function was found using equation (21), where

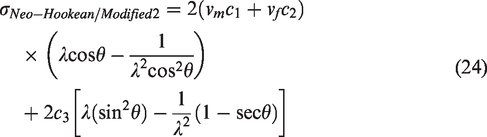
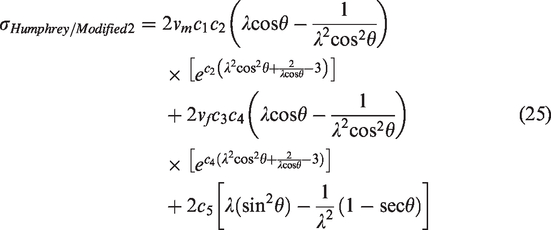
Substituting the strain energy functions from equations (19) and (20) into equation (21), the stress versus stretch equations are given by equations (22) and (23).


Material characterization is conducted using equations (22) and (23) by substituting the fiber contribution (
Modeling the effect of fiber orientation
To account for single layer fiber orientation effect in the soft composites (Figure 4),
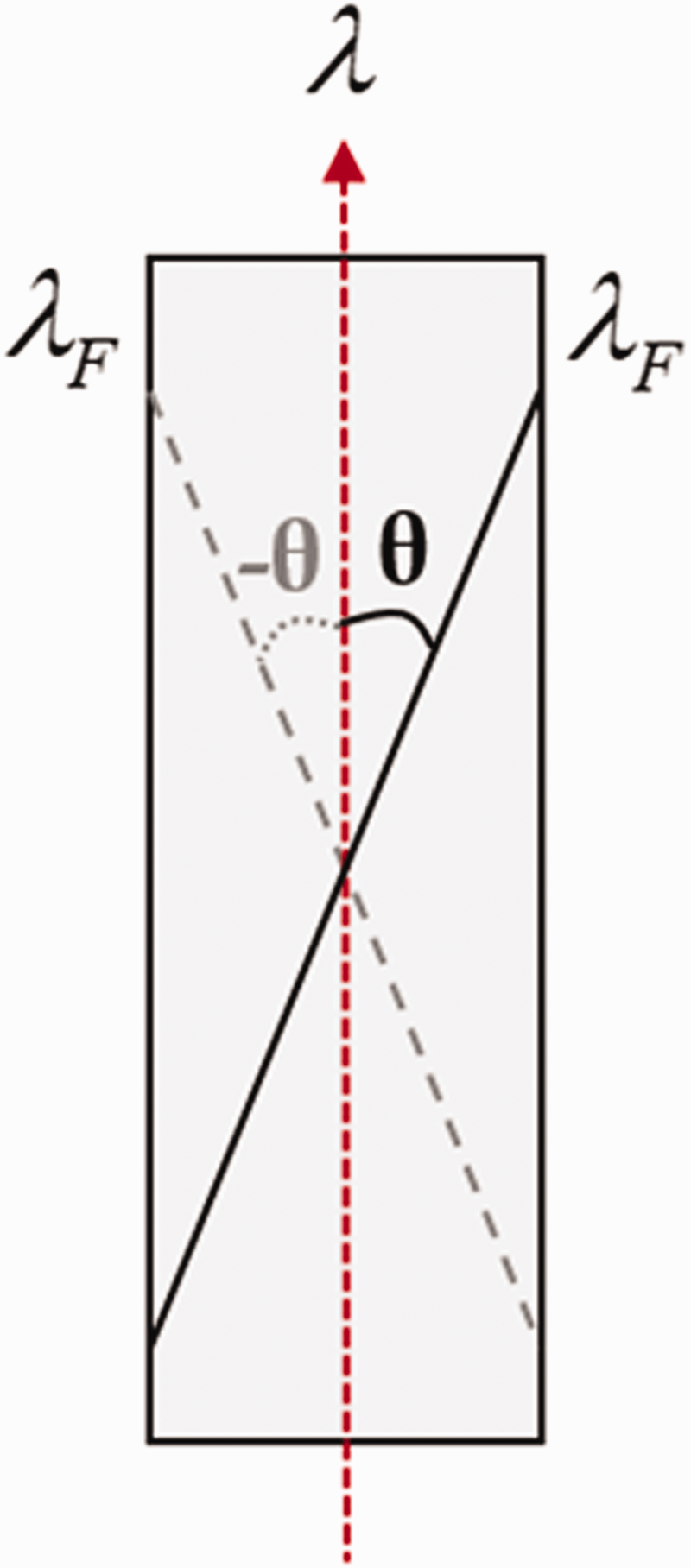
Schematic showing the stretch along the fiber (
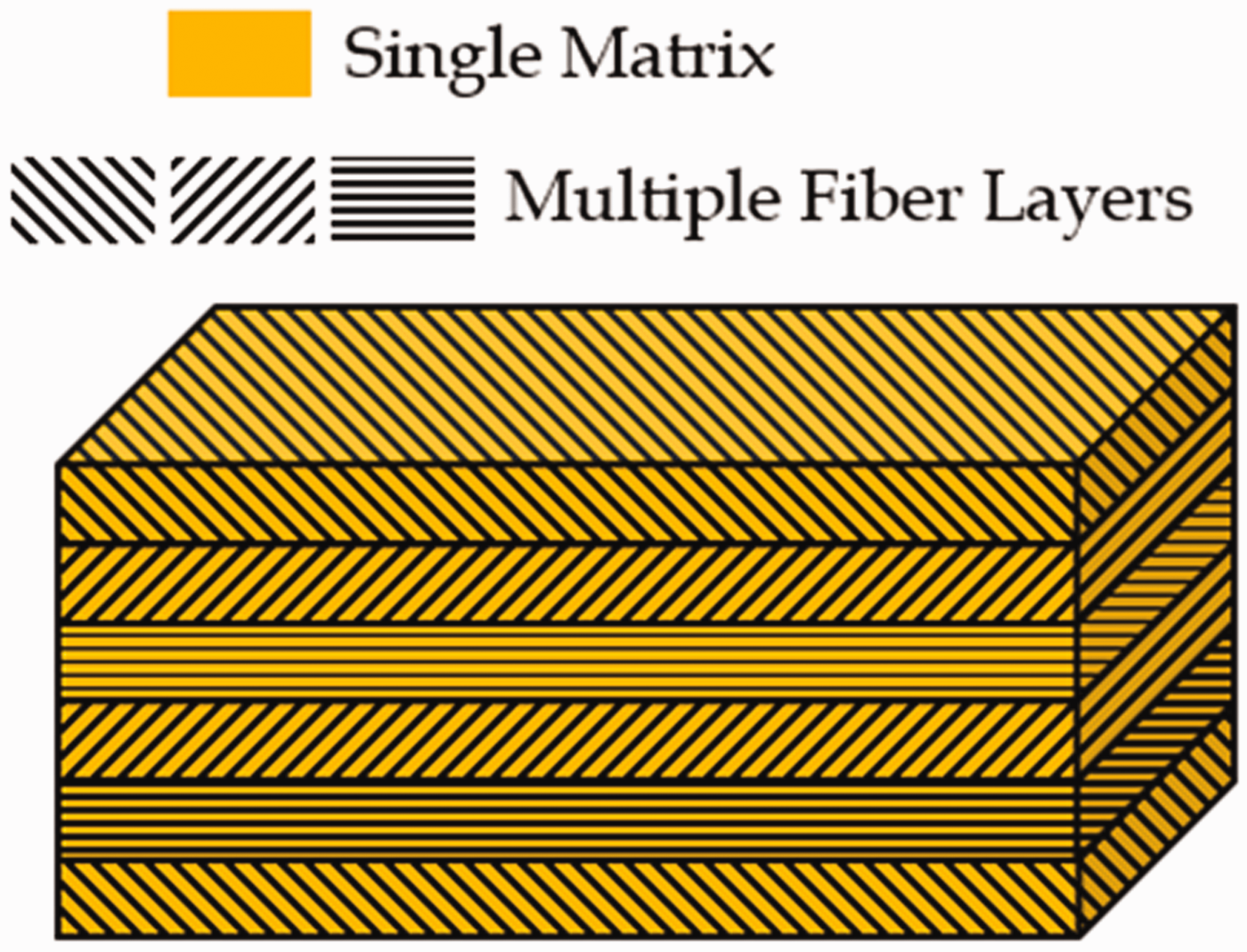
Schematic for novel anisotropic material formulation for soft composites with a single matrix and multiple fiber families.
Modeling the effect of multiple fiber layers at arbitrary orientations
For a soft composite with a single matrix and multiple fiber families embedded within it (Figure 5), the mechanical property depends only on the cumulative effect of fiber directions.42,56–59 For a composite with

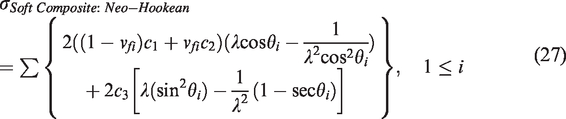
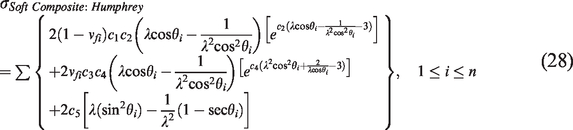
The modified generic stress-strain relationships based on equations (24) to (26) for a soft tissue composite with multiple fiber families are given by equations (27) and (28).
Results and model validation
For validation of the current model developed for characterization of the material properties of tissues, soft composite materials in literature
61
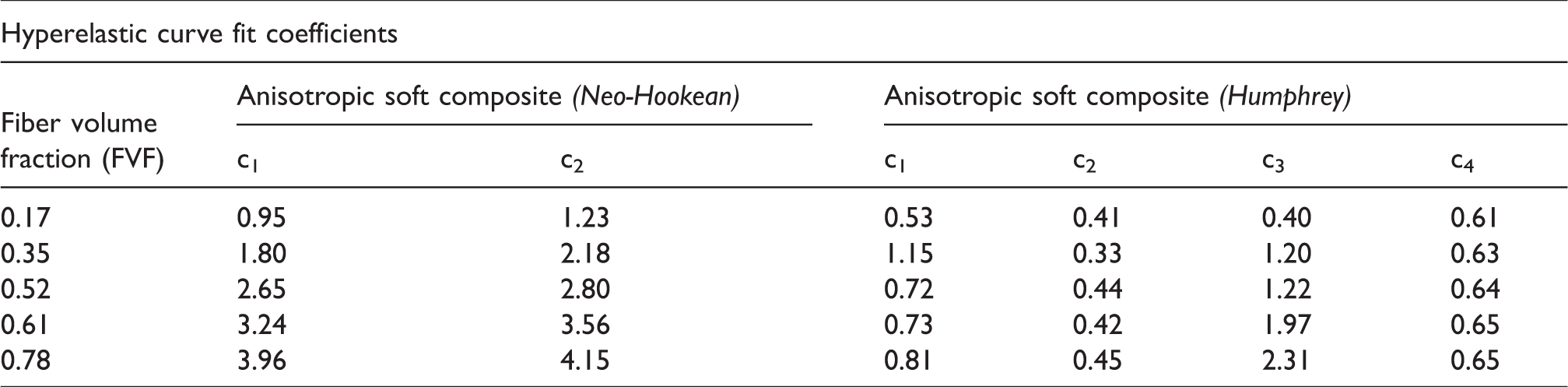
were employed. These soft composite materials have been observed to closely mimic the anisotropic material behavior of brain tissue,62,63 pelvic tissues,64,65 and the skin.66–68 The true stress versus true stretch observed with soft composites with FVF of 0.17, 0.35, 0.52, 0.61, and 0.78 respectively, were traced and plotted in Figure 6. For each plot, the fiber contribution (
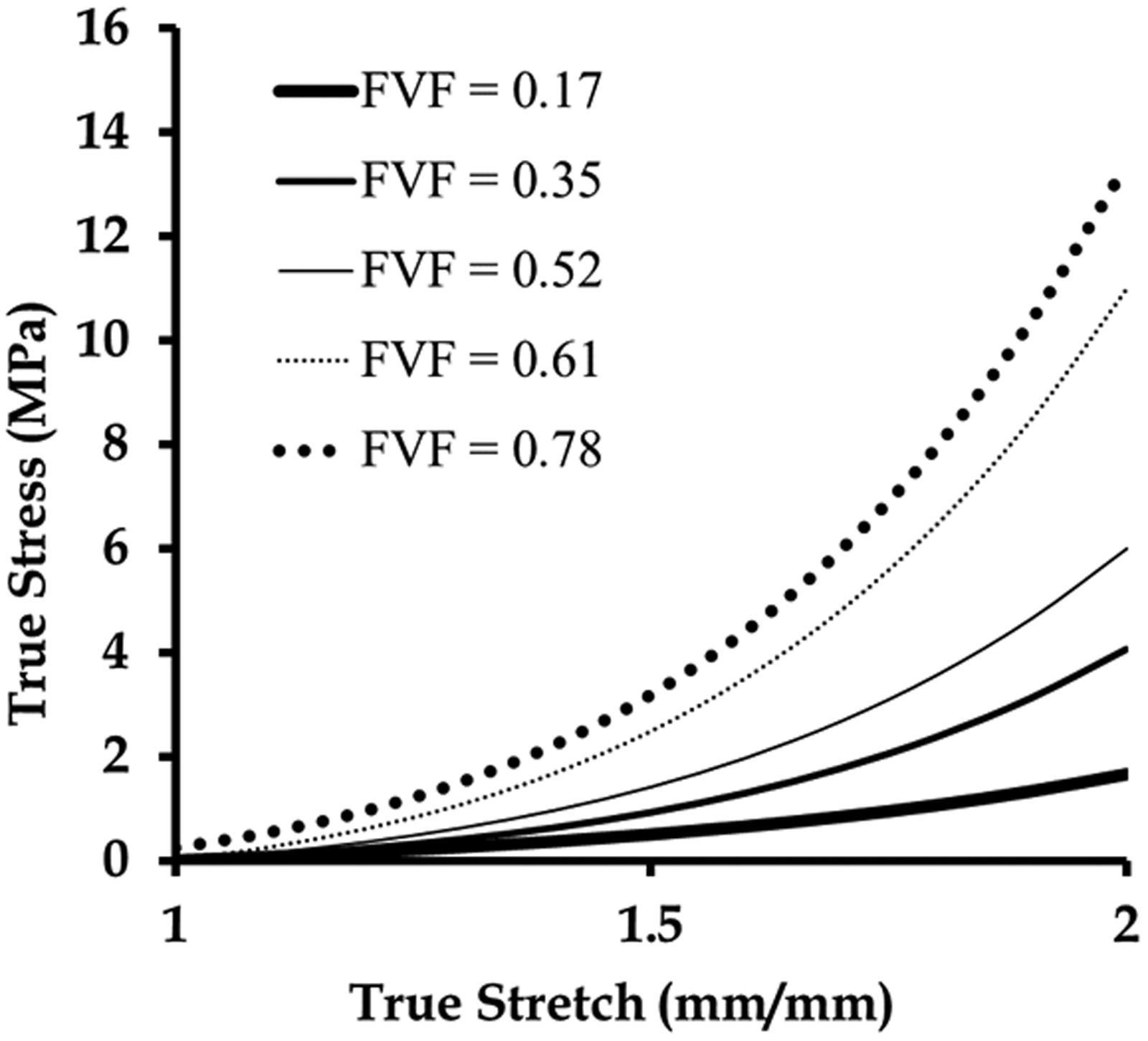
Average stress versus stretch plots traced from the literature on mechanical testing of soft composites with varying FVF. 61
A second set of soft composite properties were considered from literature,
61
comprising of the ones with multiple fibers and varying fiber angles. Figure 7 shows the trace of the average true stress versus true stretch profiles of the uniaxially tested soft composites with fiber angles
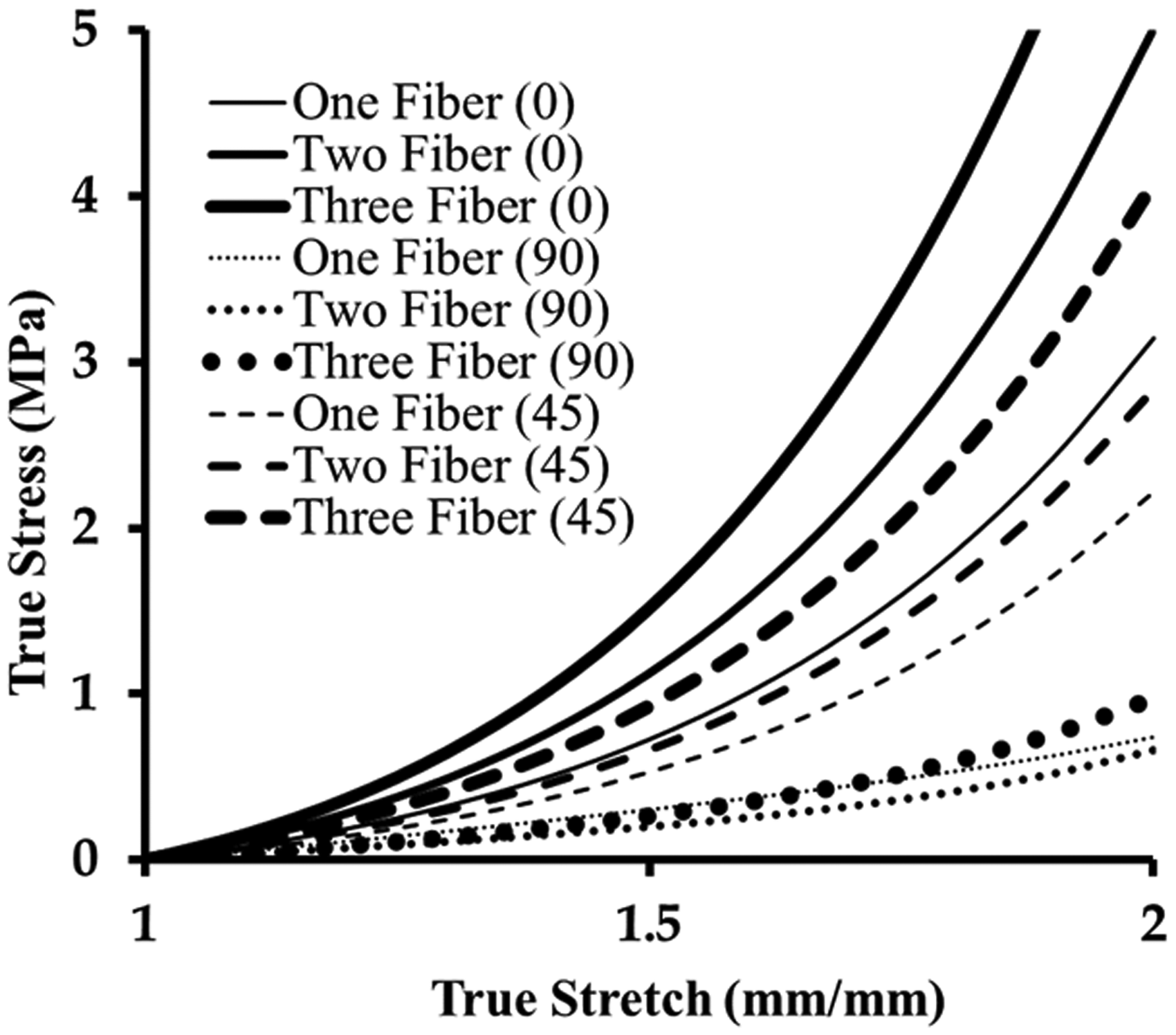
Average stress versus stretch plots traced from the literature on mechanical testing of soft composites with one, two and three fiber configurations and different fiber angles. 61
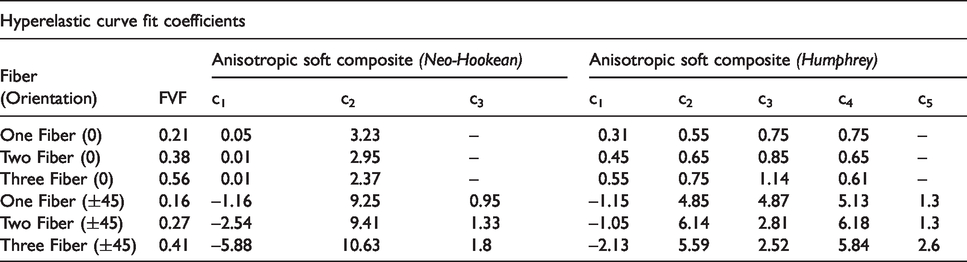
Table 2 presents the model parameters calculated for the second set of soft composites using the novel formulations (equations (27) and (28)). Table 2 also includes the FVF’s corresponding to each of the specimen configurations mentioned in Figure 7. The soft composite variants with specifically ±90° were avoided, as mentioned previously in the material modeling section, due to multiple terms in the constitutive model going to infinity. The soft composite with a 90° fiber angle in the current uniaxial test framework is assumed to behave exactly like a composite with FVF = 0. However, it should be mentioned that in reality, such a consideration is not true, as loadings are not uniaxial but multiaxial in nature, which will be subject of future studies. The average R2 correlation index estimated for this set was 0.986. Using the average correlation index values from the hyperelastic modeling for the two set of soft composite experiments, the correlation index of the newly developed hyperelastic model was concluded to be 0.983.
Discussion
A review of the state of the art of isotropic and transversely-isotropic hyperelastic models in literature indicated the lack of capabilities to date for accurate modeling of soft tissue anisotropy. In the current work, a novel soft composite based hyperelastic characterization framework was developed to model tissue anisotropy due to different layers of fibers and fiber orientations within a tissue. This material model considered both the matrix and fibers as hyperelastic materials, and took into account the matrix contribution and the individual fiber contributions, the fiber-matrix interaction, and fiber orientations for each fiber family within the soft composite. Using this novel anisotropic soft tissue characterization model, stress-strain relationships were generated for uniaxial mechanical testing. The model formulations were validated with experiments on biofidelic soft composites, which have widely been used in literature to simulate accurate soft tissue properties.
There are several limitations of the novel anisotropic hyperelastic model. First, a fiber family was assumed to not transition or interact with the adjacent fiber families. In a natural soft tissue composite system, fibers run across the layers, the effect of which will be considered in future modeling studies. Second, within a layer, the fiber orientations also change from one location to another in a natural tissue. In the current model, this location-specific change in the orientation of the fiber families was also not considered. Histology and microscopic imaging needs to be conducted to study such fiber orientation changes in different tissue systems. Third, the mechanical effect of the presence of blood vessels, capillaries and fat within tissue layers was neglected. Inclusion of the fat layer specifically in future modeling studies may lead to better tissue simulation in the study of the effect of impact loads. Fourth, effects of strain rates on the response of soft composite layers were also not modeled. Fifth, similar to other hyperelastic material models, this model did not account for energy dissipation, and is not able to simulate viscoelastic properties such as hysteresis, relaxation, and creep, observed in soft tissues. Energy dissipation will be considered in future to further improve the current model. In order to realistically characterize the soft tissue material behavior using the current model under cyclic loading and unloading, the mechanical response can be modeled as hyperelastic with different material constants at loading and unloading respectively. This method suggested by Fung et al. 69 is known as pseudoelastic modeling, which utilizes the elastic theory to model an inelastic material, such as a soft tissue. Sixth and lastly, the novel computational model was tested mainly for uniaxial mechanical test conditions. In reality, soft tissue composite loads are biaxial and multi-axial, the effect of which will be considered as a part of future work.
To date, the soft composite hyperelastic model developed in this work most comprehensively captures tissue anisotropy. This model can improve experimental modeling of tissues, and better characterization of normal and diseased tissues at different sites on the body. The computational biomechanical modeling community will also greatly advantage from using this novel hyperelastic model for better tissue material modeling, and consequently improved accuracy of results from analyses. This robust model also opens up opportunities for multiscale modeling of tissues including the study of the effects of microstructural changes on macro scale tissue properties.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.