
Abstract
Joint position sense (JPS) is commonly evaluated using an angle replication protocol with vision occluded. However, multiple sources of sensory information are integrated when moving limbs accurately, not just proprioception. The purpose of this study was to examine different availability of vision during an active JPS protocol at the shoulder. Specifically, the effects of four conditions of vision availability were examined for three target shoulder elevation angles (50°, 70° & 90°): vision occluded continuously (P-P); vision available continuously (VP-VP); vision occluded only during target memorization (P-VP); and vision occluded only during target position replication (VP-P). There were 18 participants (M age = 21, SD = 1 years). We used separate repeated ANOVAs to examine the effect of condition and target angle on participants’ absolute error (AE, a measure of accuracy) and constant error (CE, a measure of directional bias). We found a significant main effect for condition and angle for both dependent variables (p < 0.01), and follow-up analysis indicated that participants were most accurate in the VP-VP condition and least accurate in the P-VP condition. Further follow-up analysis showed that accuracy improved with higher target elevation angles, consistent with previous research findings. Constant error results were similar, as there was a prominent tendency to overshoot the target. Unsurprisingly, participants performed best at the angle replication protocol with their eyes open. However, while accuracy was reduced when vision was occluded during target memorization, it was restored during target replication. This finding may have indicated an accuracy cost due to introduced noise when transforming sensory information from a proprioceptive reference frame into a visual reference frame.
Introduction
Proprioception is referred to as the sixth sense – an awareness of where a limb is in space without visual confirmation. It is assessed for a variety of reasons including injury implications, balance and postural control, sports performance, and motor control (Han, Waddington, Anson, et al., 2015; Lephart, 2000; Sohn & Kim, 2015). Different methodologies of assessment are used, depending on the specific subdivision of the proprioception of interest (kinesthesia, joint position sense or force sense) (Han, Waddington, Adams, et al., 2015; Riemann & Lephart, 2002). The most commonly assessed subdivision is joint position sense (JPS), likely because muscle spindles are viewed as the most important mechanical receptor (Proske & Gandevia, 2012), and they are active when there are changes in muscle length. Joint position sense protocols guide a participant to move to a target joint angle (using researcher feedback, visual, or auditory cues), return the limb to the starting position and then require the participant to reproduce the target angle using only proprioceptive feedback. An error score between the presented and reproduced position is calculated to determine task performance.
Regardless of the methodology, vision of the limb under evaluation during a JPS task is occluded or limited during proprioceptive measurement (Han, Waddington, Adams, et al., 2015; Naughton et al., 2002). However, during normal human movement, multiple sources of sensory information are integrated to ensure accurate positioning of the limb (assuming closed loop control). This sensory information is obtained from the visual, proprioceptive and vestibular systems (Ernst & Bülthoff, 2004; Eysel-Gosepath et al., 2016; Ponzo et al., 2018). Together, the information is integrated to create an internal representation of the body and current position of any limb (Dijkerman & de Haan, 2007; Makin et al., 2008; Tsakiris, 2010). If the head remains still during the movement, vision and proprioception are the primary contributors. As vision is restricted during proprioceptive evaluation, only the memory of proprioception information can be used to reproduce presented targets. The difference between a presented and reproduced position is then used as a measure of proprioception, with larger differences indicating worse proprioception.
Determining the specific contributions of vision and proprioception remains an open research quest. If either vision or proprioception are disrupted or restricted, the accuracy of the movement decreases (Bagesteiro et al., 2006; Goodman & Tremblay, 2018; Grierson et al., 2009; Rossetti et al., 1995). Overall, human movement is more precise when both vision and proprioception are available (Van Beers et al., 1996). Since proprioceptive testing is normally performed without vision, which establishes the target in a proprioceptive reference frame, it is important to quantify the accuracy benefit during proprioceptive protocols when vision is available. In this context, the target position is established in both proprioceptive and visual reference frames, then the target is reproduced using both sensory modalities. Acquiring sensory information from more than one sensory modality could provide redundancy and help overcome possible noise or variability in a single signal (Ernst & Banks, 2002; McGuire & Sabes, 2009; Tagliabue & McIntyre, 2014). This research on signal noise and variability has also proposed that sensory information is transformed into other sensory reference frames (or a common reference frame) for movement planning. For instance, vision of a target without view of the limb establishes the target in the visual reference frame, but this target information needs to be transformed into the proprioceptive reference frame for the limb to accurately reach the target. Joint position sense testing protocols only establish joint position in the proprioceptive reference frame and reproduce the target in the proprioceptive reference frame. However, transforming between sensory reference frames could introduce additional noise (Khoozani & Blohm, 2018; McGuire & Sabes, 2009; Schlicht & Schrater, 2007; Sober & Sabes, 2005). A small, previous study using seven participants manipulated when vision and proprioception were available during target memorization and replication in an end target placement protocol, and the worst performance was when the target was established using only proprioception and reproduced using either proprioception and vision or just vision (Podbros et al., 1981).
Other than these reference frame transformations, noise is present in the muscle spindle signal itself (Cordo et al., 2002). It has been theorized that the least variable incoming sensory information is weighted more heavily when integrating sensory information for optimal positioning (McGuire & Sabes, 2009; Sober & Sabes, 2005). Proprioceptive testing generally only occurs in a single reference frame, but functional human motion occurs with information from multiple reference frames. For greater external validity, proprioceptive testing with influence from multiple sensory reference frames should be evaluated.
The purpose of this study was to investigate how establishing target position and reproducing the target in different combinations of sensory reference frames, visual and proprioceptive, affects active JPS at the shoulder. We hypothesized that error would be smallest when the visual and proprioceptive reference frames are both available and that the error will be largest when the visual reference frame was occluded for the duration of each trial.
Method
Participants
We recruited participants from the general population at the University of Oregon, and we collected data from 18 participants (13 female, 5 male; 16 right hand dominant, 2 left hand dominant), with an average age of 21 years (SD = 1 year). Individuals with a history of shoulder injuries, pain, or pathology were excluded, as were individuals with prior experience with the protocol. Participants were required to have normal or corrected to normal vision. All participants provided informed consent, and the study was approved by the Internal Review Board at the University of Oregon.
Procedure
We collected data with a mobile application developed for assessing shoulder joint position sense on an iPod touch (Apple, Cupertino, CA). The following protocol was adapted from the study validating the application (Edwards et al., 2016).
Participants in an ergonomic kneeling chair to limit cutaneous feedback from a shoulder rubbing on a back rest, and in a black cubicle to limit environmental visual reference points. We attached a fourth generation iPod Touch, fitted in a sport band, to the lateral humeral aspect of a participant’s dominant arm. Participants were instructed to sit up tall with shoulders back and relaxed, head facing forward and to keep still throughout the protocol. We demonstrated the flexion/extension movement of the arm in the sagittal plane for participants, and instructed them to keep their hand flat with thumb pointed up, and elbow extended, taking care to move only their shoulder (Figure 1). The researcher observed the participants for the duration of the experiment and provided feedback to maintain these parameters.
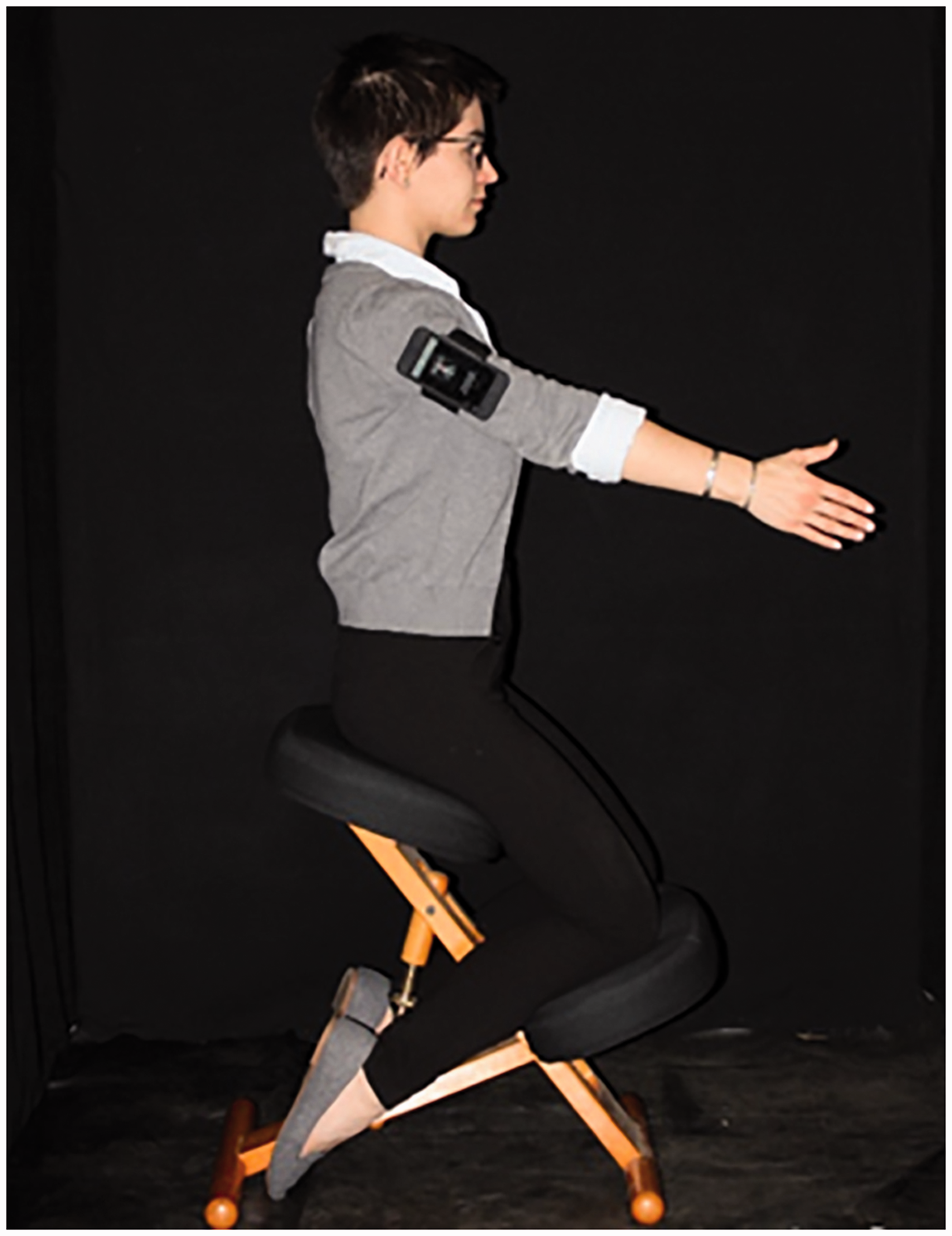
Experimental Set Up. The iPod Touch is strapped the lateral aspect of the upper arm and the participant is seated in a ergonomic kneeling chair.
In the guided stage of a trial, the application guided the participant from a resting position to a target shoulder angle by providing auditory feedback - a high tone indicated that the participant’s arm was too high, and a low tone signaled that the arm was positioned too low. No tone was emitted when the participant was at the target shoulder angle. The resting position angle was recorded by the iPod at the beginning of each trial block with the arm at the side. Upon reaching the target angle, the participant held and memorized the position for three seconds until prompted by the application to “relax” and return to the resting position. In the reproduction stage of the trial, the participant had to be within five degrees of the resting position for three seconds before being prompted to “find target” and replicate the memorized angle without auditory feedback. When the participant’s angular velocity dropped below 0.25 degrees per second during the target stage, the device recorded the position and prompted the participant to relax, signaling the end of the trial. The participant needed to replicate the memorized position within 10 seconds or the trial was excluded. As soon as the participant returned to the resting position, they would immediately hear the high tone guiding them to the next target. Participants were given three practice trials at target angles not used in the experimental protocol.
Each participant participated in four blocks of twelve trials testing three target angles (50°, 70°, 90°) that were each presented four times. In each block, the position target was established and then reproduced using a different combination of sensory modalities. During one block, the participant was allowed visual feedback and was instructed to keep their eyes open throughout each trial (visual/proprioceptive-visual/proprioceptive or VP-VP condition). During a second block, the participant did not have visual feedback and was instructed to close their eyes throughout each trial (proprioceptive-proprioceptive or P-P condition). During a third block, participants were allowed visual feedback during the guided phase but not the reproduction phase (visual/proprioceptive-proprioceptive or VP-P condition). During the fourth block, participants were allowed visual feedback during the reproduction phase but not the guided phase (proprioceptive-visual/proprioceptive or P-VP condition). The order of the blocks and the joint angle targets were randomized for each participant.
Data Analysis
Data were processed using a custom LabVIEW program. From the processed data, the absolute error (AE) and Constant Error (CE) were calculated. Absolute Error for each trial was calculated by taking the absolute value of the difference between the presented and reproduced angle. Absolute error indicated the level of accuracy in reproducing a target. The AE values of the four trials collected per angle in each visual condition for each participant were averaged to obtain an average AE. Constant Error (CE) was calculated by taking the net difference between the presented and reproduced angles. Constant Error indicates directional bias of the error: a negative value is an undershoot of the target and a positive value is an overshoot of the target.
AE represents absolute error, CE represents Constant Error, Ap represents the presented angle, Ar represents the reproduced angle, i represents the trial number, and n represents the number of trials per angle per condition per participant. In most cases, n = 4, but in some cases where a trial was excluded from analysis, only three trials were averaged. If more than two trials in any condition were excluded, the participant was removed from the analysis. This left 18 participants in the final analysis.
Statistical Analysis
Two 3x4 repeated measures analysis of variance (ANOVAs) were conducted to assess the influence of visual condition (VP-VP, P-P, P-VP, and VP-P) and target angle (50°, 70°, and 90°) - one for AE and one for CE. The α level was set at 0.05. A Greenhouse-Geisser adjustment was performed to check for any violation of sphericity. In the presence of an interaction or main effect, follow up post-hoc tests were performed using a Bonferroni adjustment to control for family-wise Type I error.
Results
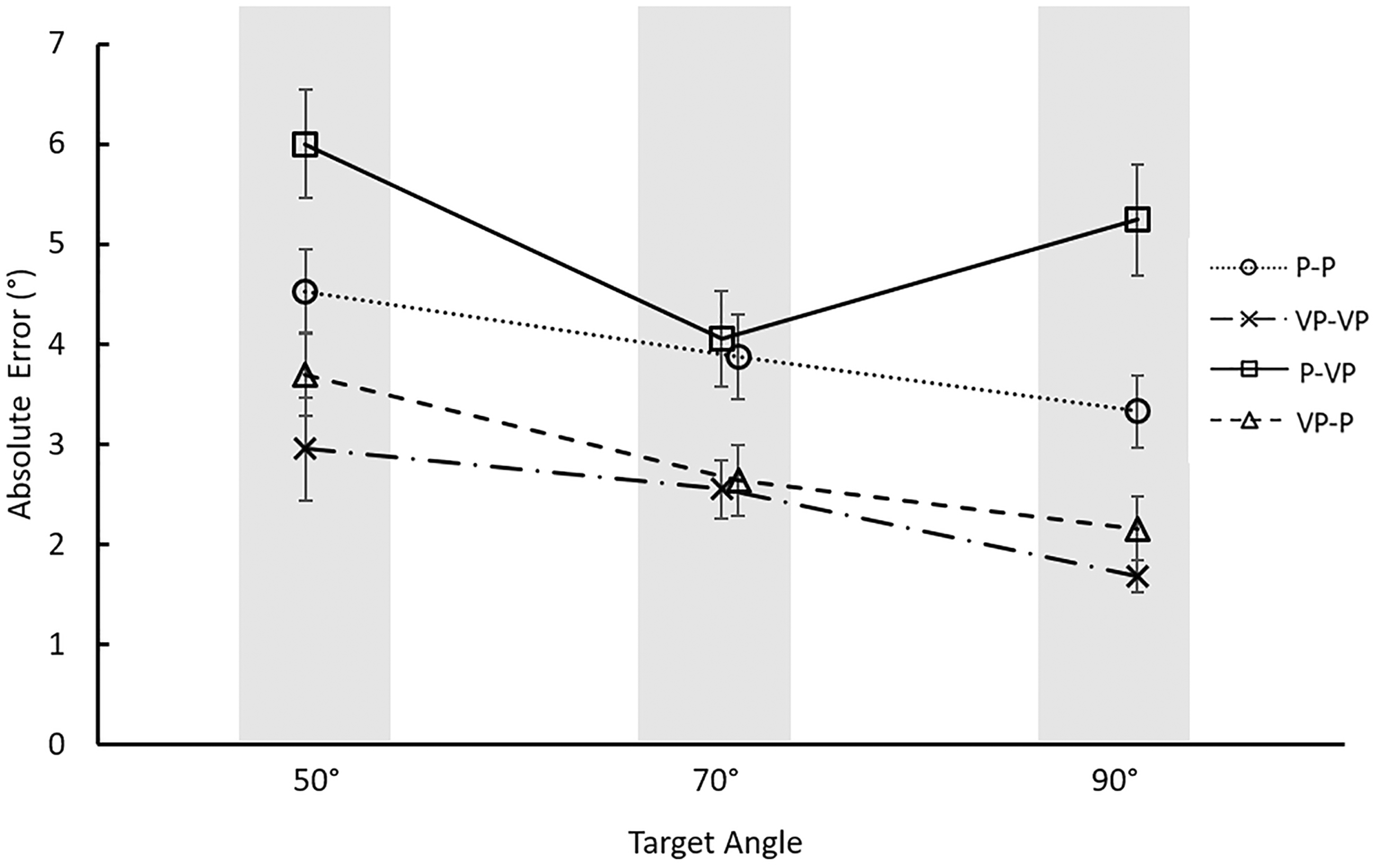
For AE (Figure 2), there was no significant interaction between visual condition and angle (p = 0.07). However, there was a main effect for both visual condition (p < 0.001) and angle (p < 0.001). Follow up comparisons for condition indicated that the VP-VP condition had lower AE scores compared to the P-P condition (p < 0.01) and the P-VP condition (p < 0.001); the VP-P condition had lower AE scores compared to the P-P condition (p < 0.01) and the P-VP condition (p < 0.001); and the P-P condition had lower AE scores compared to the P-VP condition (p < 0.01). The P-VP condition had the highest error score of all conditions. Follow-up comparisons for angle indicated that the 90° target angle had a lower AE score than 50° (p < 0.01) and the 70° target angle had a lower AE score than 50° (p < 0.01) (Table 1).
Absolute Error for Each Shoulder Joint Angle and Condition: P-P, proprioceptive-proprioceptive, VP-VP, visual/proprioceptive-visual/proprioceptive, VP-P, visual/proprioceptive-proprioceptive, P-VP, proprioceptive-visual/proprioceptive. Significant statistical effects are indicated in Table 1.
Absolute Error Means (Degrees) and Standard Deviations for Each Visual Condition at Each Angle.
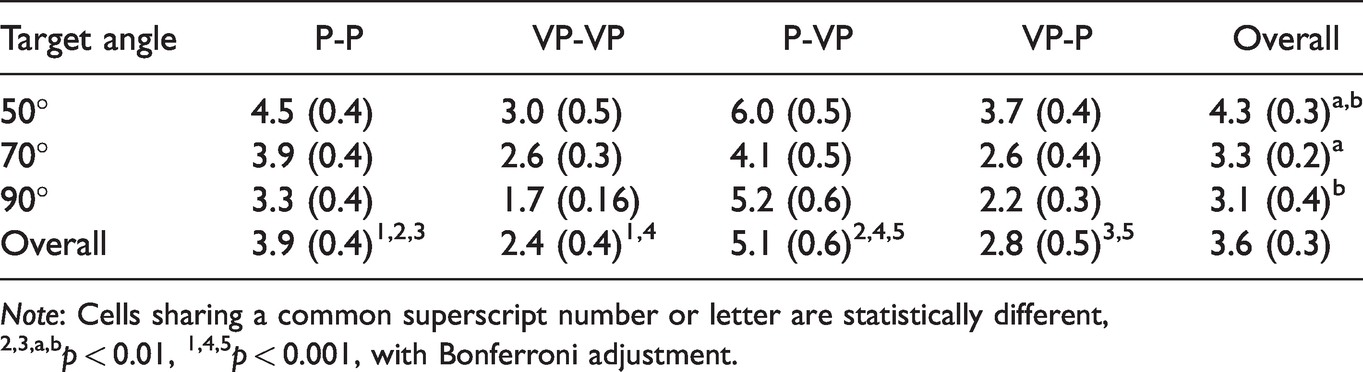
Note: Cells sharing a common superscript number or letter are statistically different,
2,3,a,bp < 0.01, 1,4,5p < 0.001, with Bonferroni adjustment.
For CE (Figure 3), there was no significant interaction between visual condition and angle (p = 0.062). However, there was a main effect for both visual condition (p < 0.001) and angle (p = 0.014). Follow-up comparisons for condition indicated: the VP-VP condition had lower CE scores compared to the P-P condition (p < 0.05) and P-VP condition (p < 0.001); the VP-P condition had lower CE scores compared to the P-P condition (p < 0.001 for both) and the P-VP condition (p < 0.001). The P-VP condition had the highest CE score of all conditions. Follow-up comparisons for angle indicated that the 90° target angle had a lower CE score than 50° (p < 0.05) (Table 2).
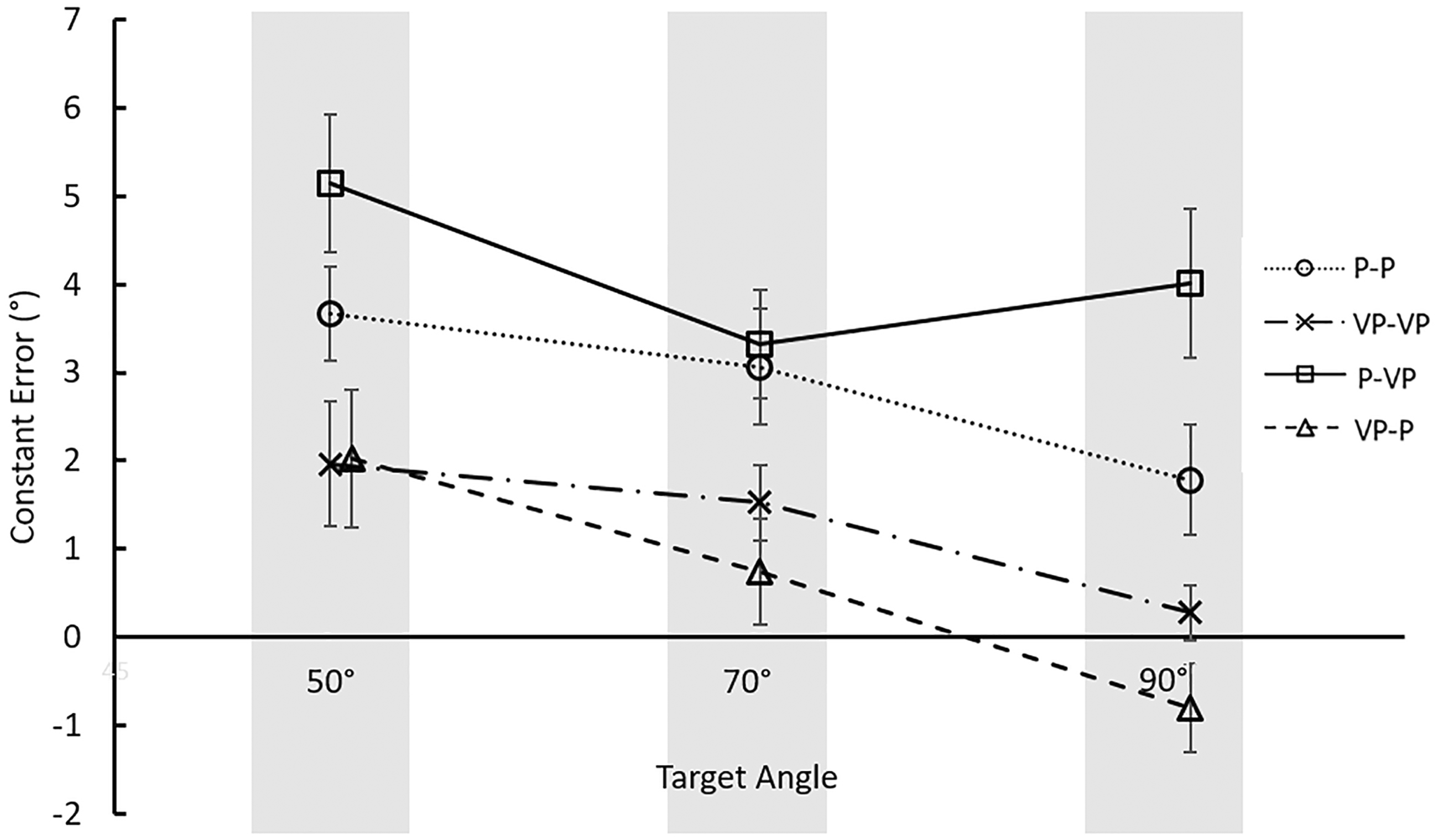
Constant Error for Each Shoulder Joint Angle and Condition. P-P, proprioceptive-proprioceptive, VP-VP, visual/proprioceptive-visual/proprioceptive, VP-P, visual/proprioceptive-proprioceptive, P-VP, proprioceptive-visual/proprioceptive. Significant statistical effects are indicated in Table 2.
Constant Error Means (Degrees) and Standard Deviations for Each Visual Condition at Each Angle.
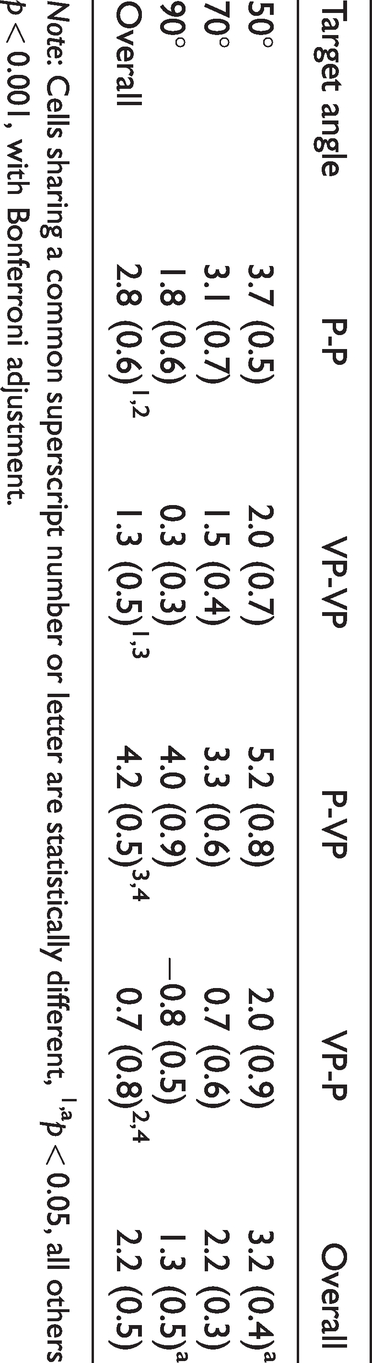
Note: Cells sharing a common superscript number or letter are statistically different, 1,ap < 0.05, all others p < 0.001, with Bonferroni adjustment.
Discussion
The purpose of this study was to investigate the effects of visual information on active JPS at the shoulder. Our hypotheses can be summarized as follows: the more visual information available to the participant, the lower the error on the JPS task. Our hypotheses were partially supported. The visual condition in which the most visual information was available (VP-VP condition), or when eyes were open for the duration of each trial, allowed for the highest accuracy, according to the AE scores (Table 1). However, the condition in which vision was occluded for the duration of each trial, P-P, was not the least accurate condition. Rather, the least accurate condition was P-VP in which vision was occluded during the guided part of the trial but available during the reproduction phase. The trials in which vision was available during the guided phase and occluded during the reproduction phase, labelled VP-P, was not significantly different from the VP-VP condition; but it was more accurate than both the P-VP and P-P conditions. These results indicated that JPS accuracy, or the internally memorized/mapped position, was affected by both the amount of visual information and the timing of when vision was available. The CE interpretation is not substantially different from AE, as participants tended to overshoot more than undershoot the target.
Previous literature indicated that the visual reference frame can introduce bias when reaching for a target (Burns et al., 2011; McGuire & Sabes, 2009; Schlicht & Schrater, 2007). Distorting vision leads to a significant bias in the direction of the distortion (Bagesteiro et al., 2006), while tendon vibration disrupting proprioceptive feedback only reduces movement consistency when vision is available (Goodman & Tremblay, 2018). Our experiment manipulated whether visual information was available during the memorization of a target joint angle and when reproducing the memorized joint angle. This meant that the memorized position was established either in both the visual and proprioceptive reference frames or only in the proprioception reference frame. The position was then reproduced using the reverse conditions – either with both vision and proprioception or with proprioception only. Our results bore a striking resemblance to a previous small sample study that manipulated vision and proprioception during target memorization and replication (Podbros et al., 1981). The P-VP condition in that study had the highest error (except for P-V, which was not a condition in our study).
In the VP-VP and P-P conditions, the same sensory reference frames are used to both memorize the target position and reproduce the target position. This study demonstrated a clear benefit to having both vision and proprioception available. This result was expected since previous research had already established that movement is more accurate when both vision and proprioception are available (Van Beers et al., 1996). This benefit still exists when the reference position was established with both the vision and proprioception reference frames, but it was reproduced in only the proprioceptive reference frame (VP-P condition). In fact, we did not observe significant differences compared to the condition in which vision and proprioception were both available (VP-VP). This possibly indicates that the transformation of the visual representation into the proprioceptive reference does not introduce a significant amount of noise because there was no difference between conditions when vision was not available when the target was reproduced (VP-P) and when vision was always available (VP-VP). We can also assume that there was some transfer between sensory reference frames since the error was still better than when the proprioceptive reference frame alone was used (P-P condition).
This transfer between sensory reference frames also appears to create a disruption when the visual reference frame is not involved in the memorization of the target position. In the P-VP condition, the reference position was established only in the proprioceptive reference frame but reproduced when both vision and proprioception was available. The performance of participants was worst in this condition. It is therefore possible that the sensory information established in the proprioceptive reference frame was transformed into the visual reference frame. Noise above what was present in the proprioceptive signal was introduced by this transformation reducing the participants’ overall accuracy. Visual sensory information (transformed from the proprioceptive reference frames, including noise introduced by this transformation) was weighted by the central nervous system despite it not having been used to establish the memorized reference position. This is an example of an unnecessary sensory reference frame transformation, since the task would be accomplished better if only proprioceptive information was used. It seems that if vision is available in a joint angle reproduction task, it will receive a weighting factor even if this reduces task performance. This also indicates that the central nervous system does not necessarily weight different incoming sensory information optimally under all circumstances. This decrement in performance was so large that the effect of decreasing error with shoulder elevation angle, seen in the three other conditions (VP-VP, VP-P, and P-P) and in a number of other experiments in our lab (eg. Edwards et al., 2016; King et al., 2013; Phillips & Karduna, 2018), was absent.
The angle effect was not present in the P-VP condition, indicating that its cause lies in the proprioceptive system. Although we did not specifically examine the cause of this angle effect in this study, the fact that it was seen in three conditions reassured us that our participants behaved similarly to those in previous studies. We postulate that the transformation from a proprioceptive reference frame to a visual reference frame is the primary source of error in the P-VP condition, and the previous study manipulating vision and proprioception provides support for this (Podbros et al., 1981). When vision was available during memorization, participants had the lowest error level, even if proprioception was then available during replication. The introduction of proprioceptive information during replication does not introduce significant error, as the CNS already significantly weights vision. Similarly, the sensory transformation from vision to proprioception (V-P) was very similar to the condition with only proprioception (P-P). Transformation from vision to proprioceptive reference frames are therefore less noisy.
While error was worse when a position was only memorized using proprioception but then reproduced with vision of the limb, there was on average a 2.4° difference between the P-VP condition and the condition with the lowest errors, VP-VP. Botvinik and Cohen (1998) referred to this as ‘constraint satisfaction process operating between vision, touch and proprioception.’ The error between the memorized and reproduced positions can never be so great that the information from the visual and proprioceptive systems no longer correlate. Even the error introduced by the unnecessary transformation into the visual reference frame in the P-VP condition must still satisfy the constraints imposed by the proprioceptive information.
Limitations and Directions for Further Research
A limitation to our measurement method was that the angle use by the iPod was relative to the direction of gravity and not to the angle formed between the humerus and thorax segments. The use of the iPod for this protocol was previously established in a prior study (Edwards et al., 2016), but when researchers are interested in exact thoracohumeral angles, they may prefer a 3D motion capture system. Our participants were also exposed to the same target angles (and possible learning effects) for each condition. To control for this, we randomized the order of the conditions for each participant. Even though some learning may be present, we minimized practice and order effects by our randomized presentation of conditions, absence of feedback on participant performances, and absence of angle practice in the experimental protocol. We gained confidence that these steps were efficacious in that our participants reproduced the angle effect – decreasing error with increasing humeral elevation.
Conclusion
In conclusion, we found that participants were most accurate at demonstrating active joint position sense at the shoulder when both visual information and proprioceptive information were available in an active JPS protocol. Participants were least accurate when vision was occluded during the initial positioning/memorization period and vision was unobstructed during repositioning. It is likely that this increased error was due to an unnecessary transformation from the proprioceptive reference frame to the visual reference frame.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.