
Abstract
A nonlinear robust control strategy is proposed in this paper to deal with wing rock motion. The method is based on the disturbance observer enforced contraction theory results. The disturbance observer calculates and robustly cancels system uncertainties and input disturbances. The information regarding the known part of the nonlinear plant dynamics is used by the controller, while the uncertainties and disturbances are treated as an additional input to the system and dealt with by the disturbance observer. The algorithm demonstrates good performance in damping the oscillations while rejecting the disturbances. Simulations are provided to demonstrate the effectiveness of the proposed method via an application to an experimentally derived delta wing rock model operating in both nominal and uncertain environments.
1. Introduction
Several modern high-performance aircraft exhibit lightly damped or undamped rolling oscillations around the longitudinal axis at moderate to high angle of attack (AOA), commonly referred to as wing rock (WR). Such dynamics possesses either limit cycles, which become stable after a transient phase, or divergence. WR can have a deteriorating effect on an aircraft performance in addition to distracting the pilot. WR can be anything from an early warning of imminent departure or spin entry to inertial and kinematic coupling, leading to AOA excursions and loss of control. If WR is left uncontrolled, handling qualities are compromised in addition to a degradation of maneuvering capabilities in terms of the maximum achievable AOA.1,2
The first type of WR, usually associated with high-AOA, low-airspeed flight in blowy conditions, is characterized by unsteady lateral motions at relatively high AOA. These motions demonstrate small-amplitude intermittent non-periodic roll oscillations, and since these are assumed to be a function of pilot–vehicle interaction, flight procedures are typically changed to avoid this type of WR without significantly compromising mission accomplishment. The WR of the second type is characterized by large roll angle variations and normally associated with high-AOA maneuvering. In cases where a combat aircraft is incapable of tracking a target due to WR, severe performance degradation is obvious. Moreover, the presence of WR during the approach or landing phase may have acute influence on the aircraft operational safety. From the stability point of view, WR is created by a nonlinear aerodynamic mechanism and associated with the nonlinear trend of roll damping derivatives, causing hysteresis and sign changes of the stability parameters while increasing the AOA or airspeed during aircraft maneuvers.3,4 Suppressing WR is accomplished via appropriate ailerons deflection (Figure 1) and is a task that is important to both aircraft designers and control engineers.
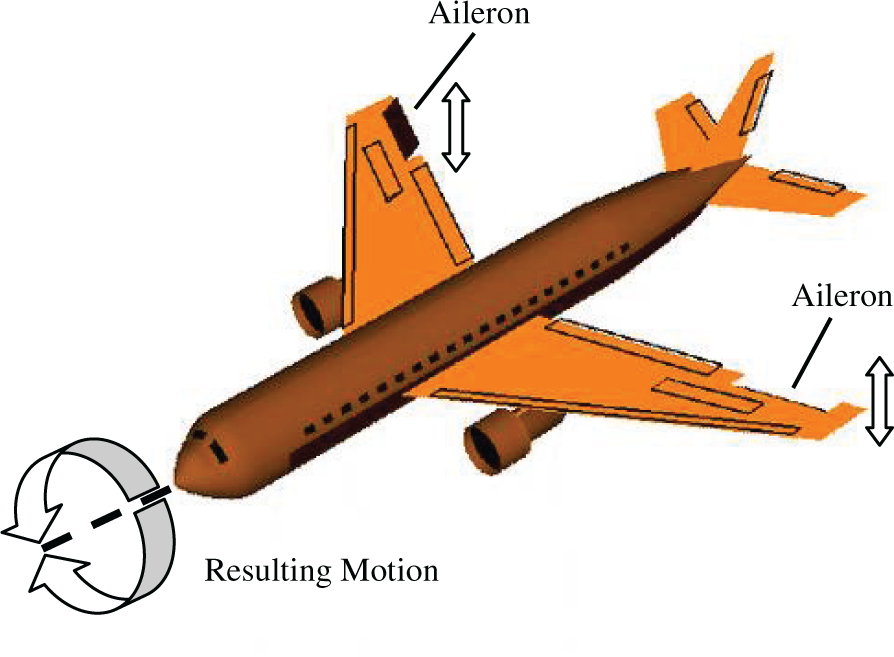
The influence of aileron deflection on the roll motion (modified from http://www.grc.nasa.gov/WWW/K-12/airplane/bga.html).
The problem of controlling WR motion has attracted quite a few researchers during the last two decades. For example, adaptive feedback linearization approaches were proposed by Monahemi and Krstic 5 and Jain, 6 and suboptimal and optimal algorithms were discussed by Xin and Balakrishnan 7 and Abdulwahab and Hongquan, 8 , respectively. Kalman-filter-based control has shown promising results in Shue and Agarwal. 9 Fuzzy,10,11 fuzzy adaptive, 12 and fuzzy neural 13 approaches has recently gained popularity. Neural-network-based control14,15 and wavelet adaptive backstepping approaches 16 were also considered. Moreover, several nonlinear control algorithms has proven to be suitable for dealing with WR motion.17–19 Recently, adaptive control using the contraction theory (CT) has been successfully applied to a WR system in uncertain environment. 20
CT is a tool for analyzing the convergence properties of nonlinear systems in the state space form.21,22 A nonlinear dynamic system is called contracting if trajectories of perturbed system exponentially return to their nominal behavior. CT requires no specific knowledge of a specific attractor, opposed to the Lyapunov stability-based analysis. The CT may be relatively easy applied to the controller synthesis of nonlinear system in case all the parameters are known. In an uncertain environment, an estimator must be employed to ensure acceptable performance. Sharma and Kar 20 applied an adaptive backstepping approach to calculate the uncertain parameter estimates.
In this paper, a disturbance observer (DOB) approach is employed. The use of a DOB introduces a two-degree-of-freedom structure, where tracking and disturbance rejection are treated independently. 23 The DOB is a state or output feedback algorithm, based on the model inversion and filtering approach. 24 Here, an uncertainty and disturbance estimator (UDE)25,26 is employed as a DOB, which is able to quickly estimate uncertainties and disturbances. In order to implement the UDE approach, instead of estimating each of the uncertain parameters and disturbances, they are lumped together, estimated and added to the control signal to cancel out the influence of the unknown part of the plant, providing excellent robust performance.
The rest of this paper is organized as follows. In Section 2, the main results of the CT are revisited. WR modeling is described in Section 3, followed by the application of UDE-based DOB enforced CT to the WR problem in Section 4. Conclusions are made in Section 5.
2. Contraction theory: main results
A brief review of the CT results is given in this section. Readers are referred to Lohmiller and Slotine21,22 and Jouffroy and Slotine 27 for more details.
Consider a nonlinear system (either open or closed loop) described in the following state space form
where
The system is called contracting if the Jacobian matrix denoted as
is uniformly negative definite (UND). Hence, for the system given in (1), a region in the state space is called a contracting region if the Jacobian is UND in that region. Moreover, any trajectory starting in a ball of a constant radius, centered about a given trajectory and contained at all times in a contraction region remains in that ball and converges exponentially to a given trajectory. Further, global exponent convergence to this trajectory is guaranteed if the whole state space region is contracting. Alternatively, the system is called semi-contracting if the Jacobian matrix is uniformly negative semi-definite (UNS).
In general, let
be a stable reference system, defining the desired specifications. The error between the states of the reference model and the states of the system is
and the error dynamic system is
If the Jacobian
3. Modeling the Wing Rock Motion
The WR motion can be described by the following one-degree-of-freedom nonlinear differential equation,1,17 based on the Newton’s second law of angular motion:
where

where
where
where
with
with
which are nonlinearly dependent on AOA and
Assuming an additive input disturbance (such as wind gusts) of the form

where
where
Consider an aircraft with an
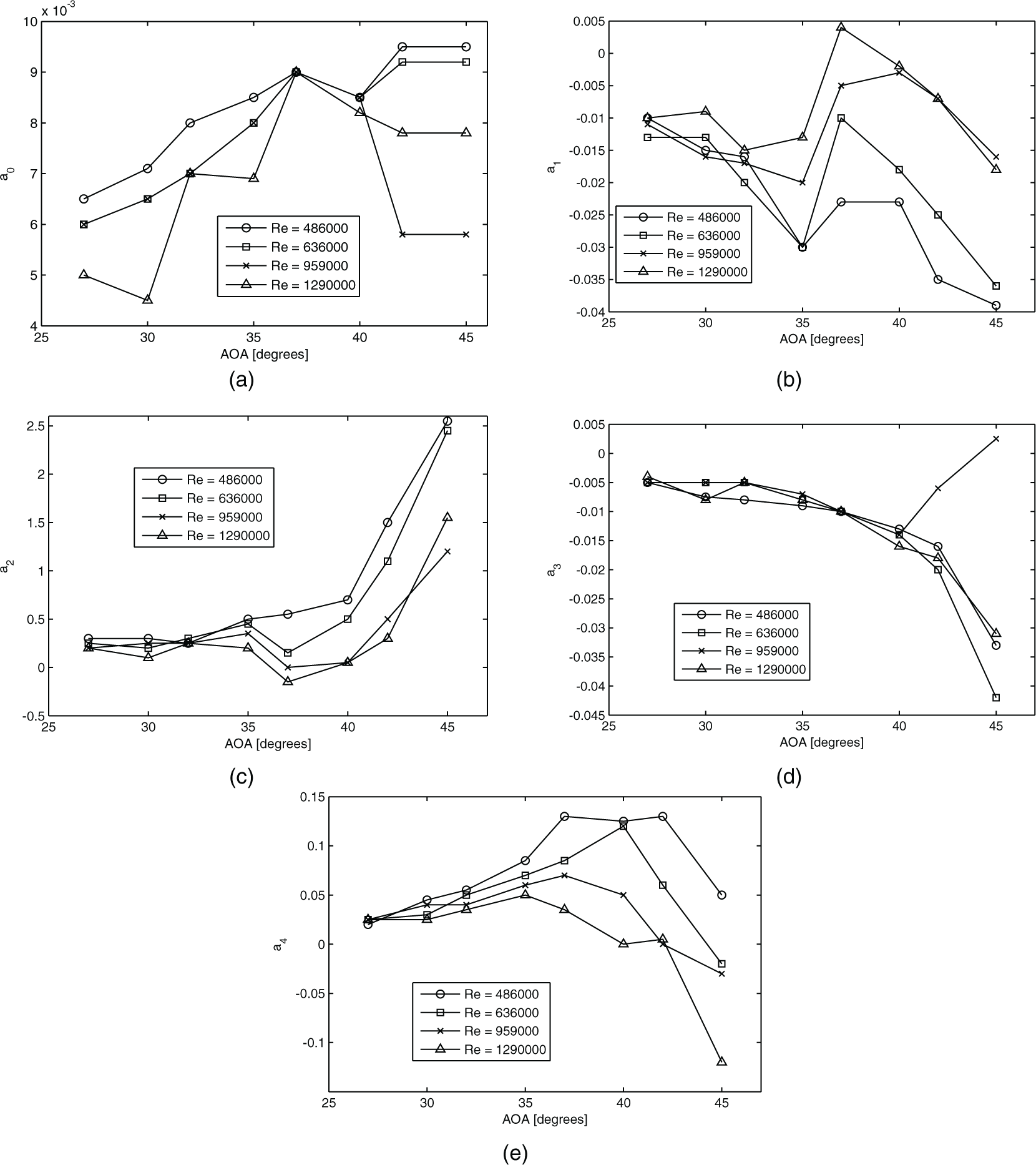
The coefficients (a)
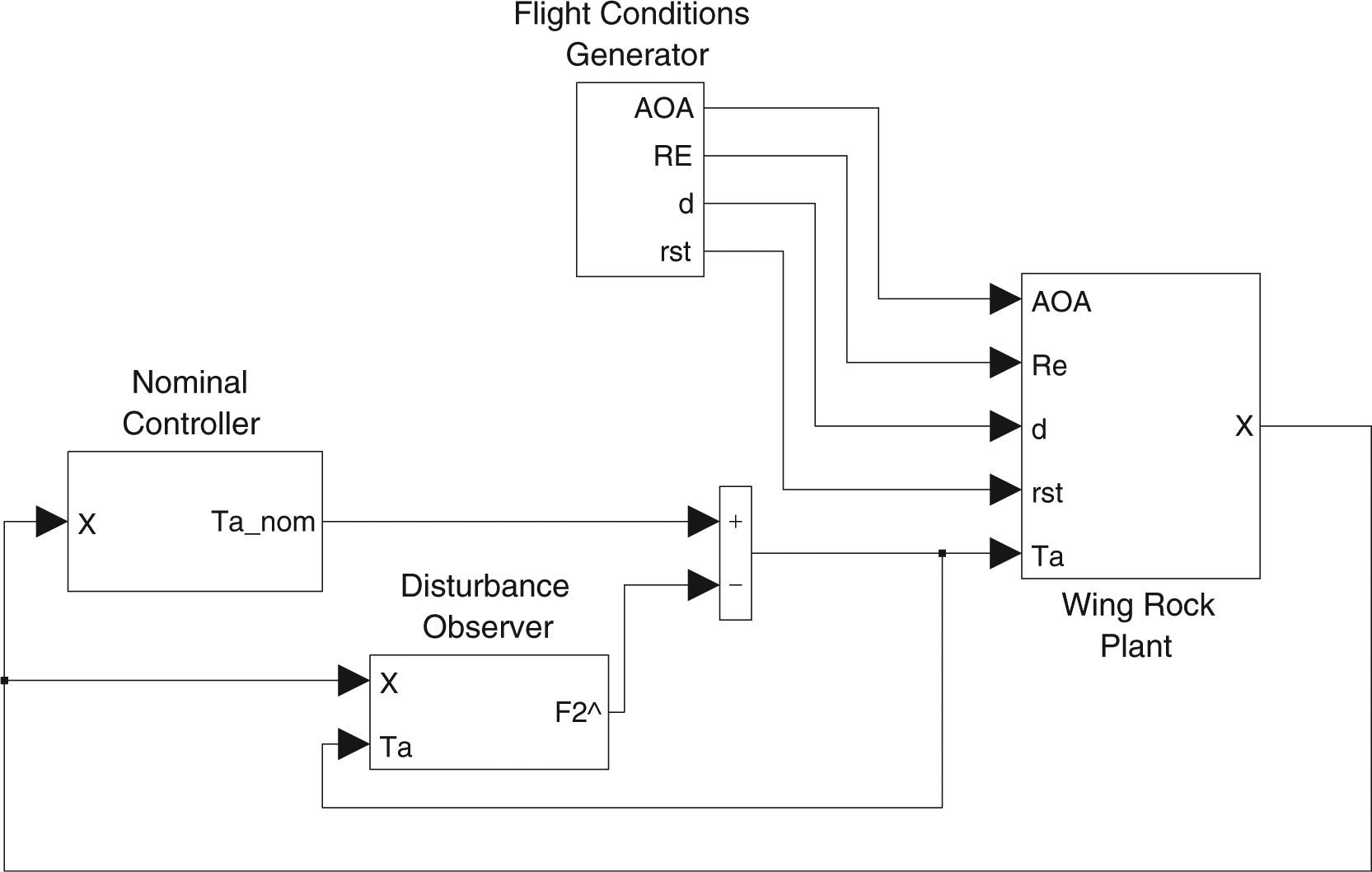
The Simulink plant model is shown in Figure 3. The uncertain parameters
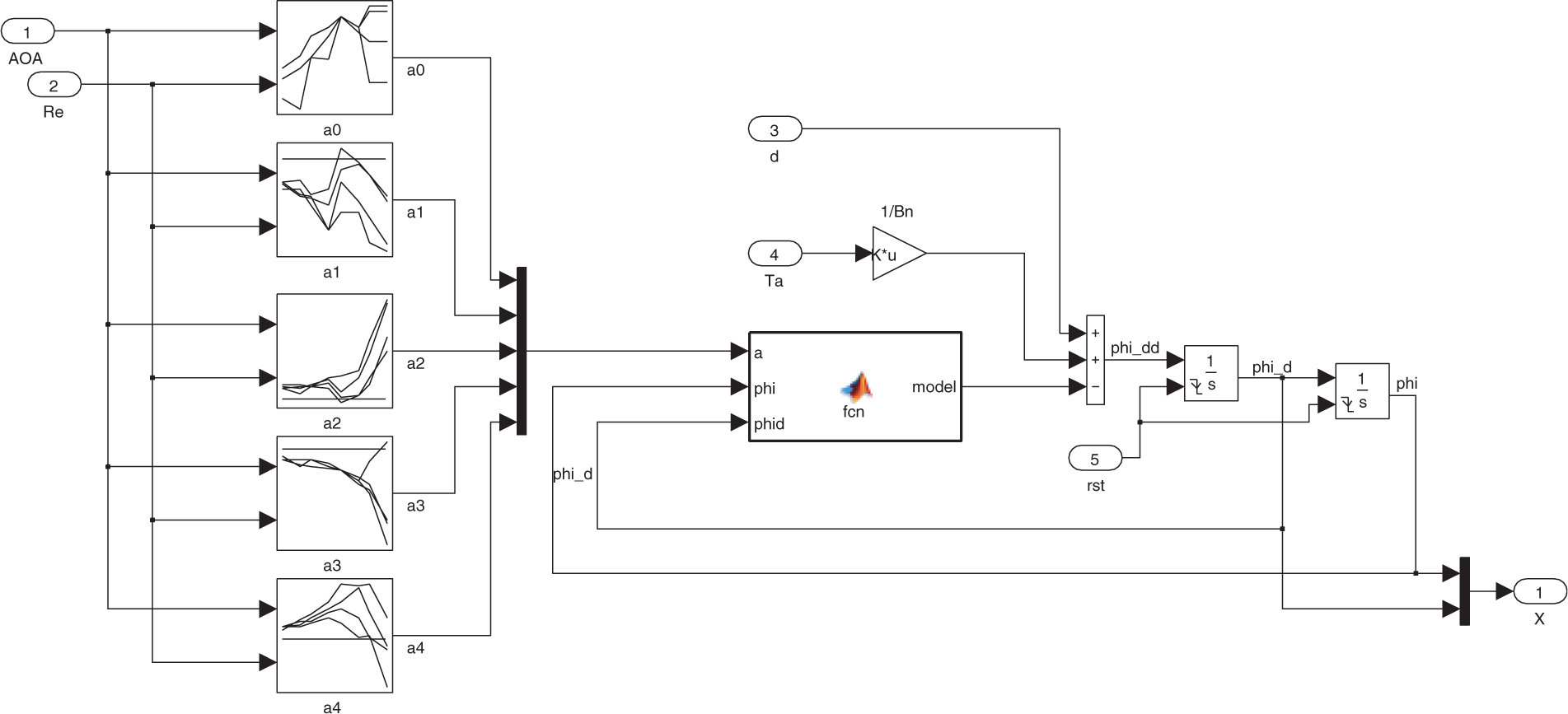
Simulink plant model.
As mentioned in Section 1, an uncontrolled WR motion results either in limit cycle oscillations or in unstable divergence, depending on the initial condition.
13
This is shown in Figure 4 for two different initial conditions. In the case of initial conditions of
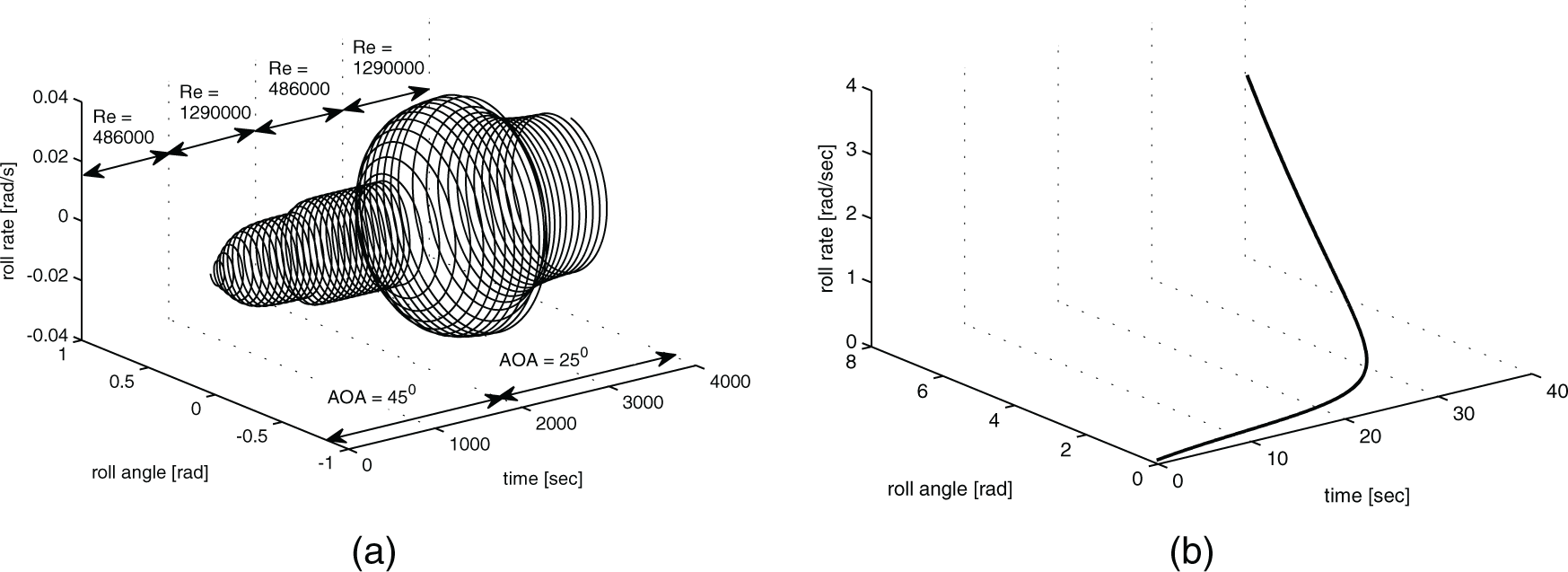
Uncontrolled WR dynamics: (a) limit cycle oscillations; (b) divergence.
4. Control of WR motion in nominal and uncertain environments
The desired closed-loop system behavior is defined by a reference model, chosen here as the following second-order system,
Note that since the control objective is to suppress the WR dynamics, the desired steady-state operating point for the system states
When all of the parameters are known and there are no uncertainty and external disturbances, the controller
is proposed, according to Lohmiller and Slotine21,22 and Jouffroy and Slotine. 27 Substituting (17) into (13) and rearranging the results, then the error dynamics is
with
When the coefficients
where
In order to design the UDE-based DOB, the following procedure is proposed. First, note that the lumped uncertainty and disturbance function
but it cannot be used directly in order to preserve the causality. Instead, its estimate is created after appropriate filtering
where

it can be concluded that if the
If the majority of the spectral content of
Simulink plant model.
In order to suppress the WR within 10 s without overshoot,
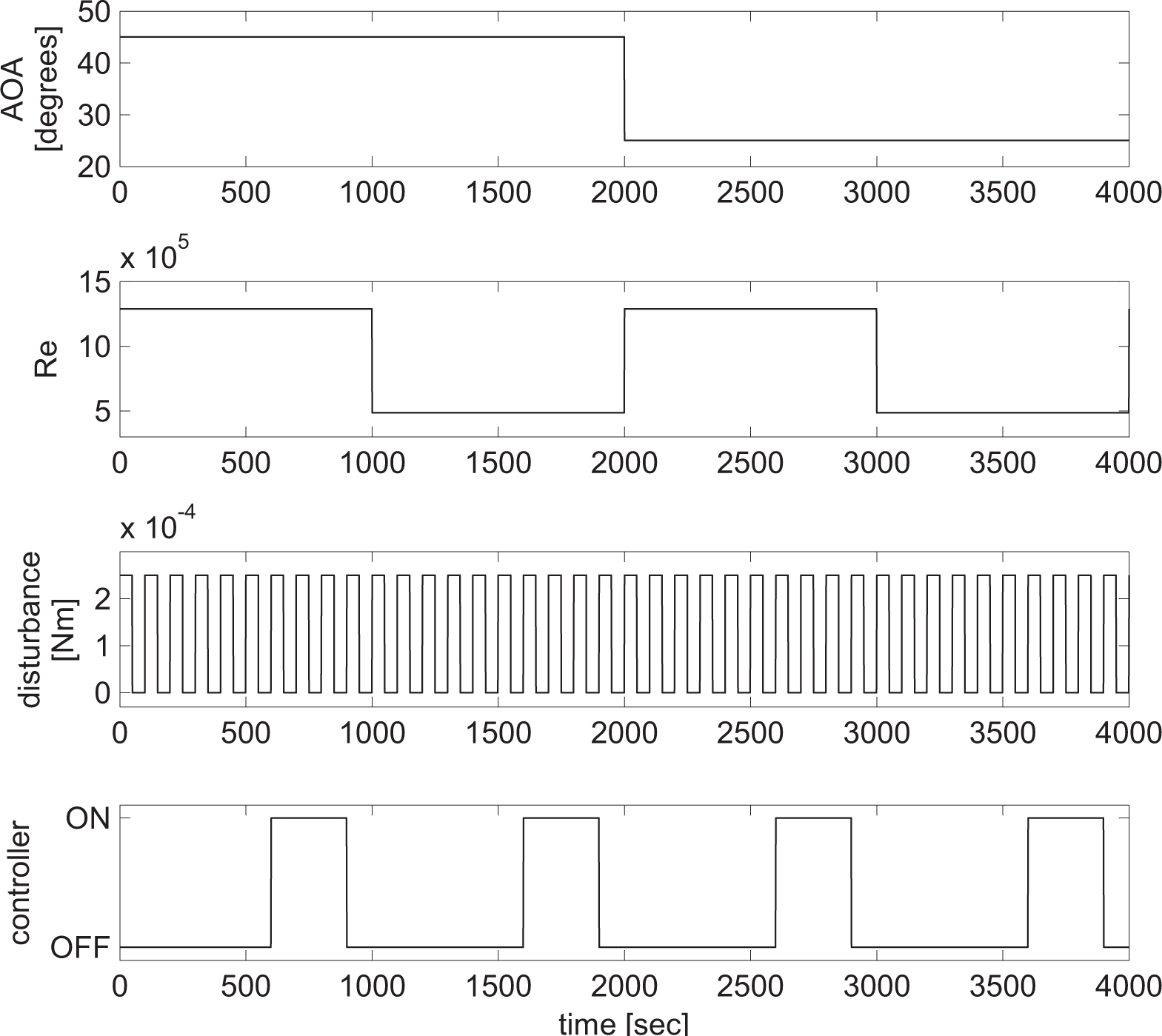
Change of the operating conditions during the simulations.
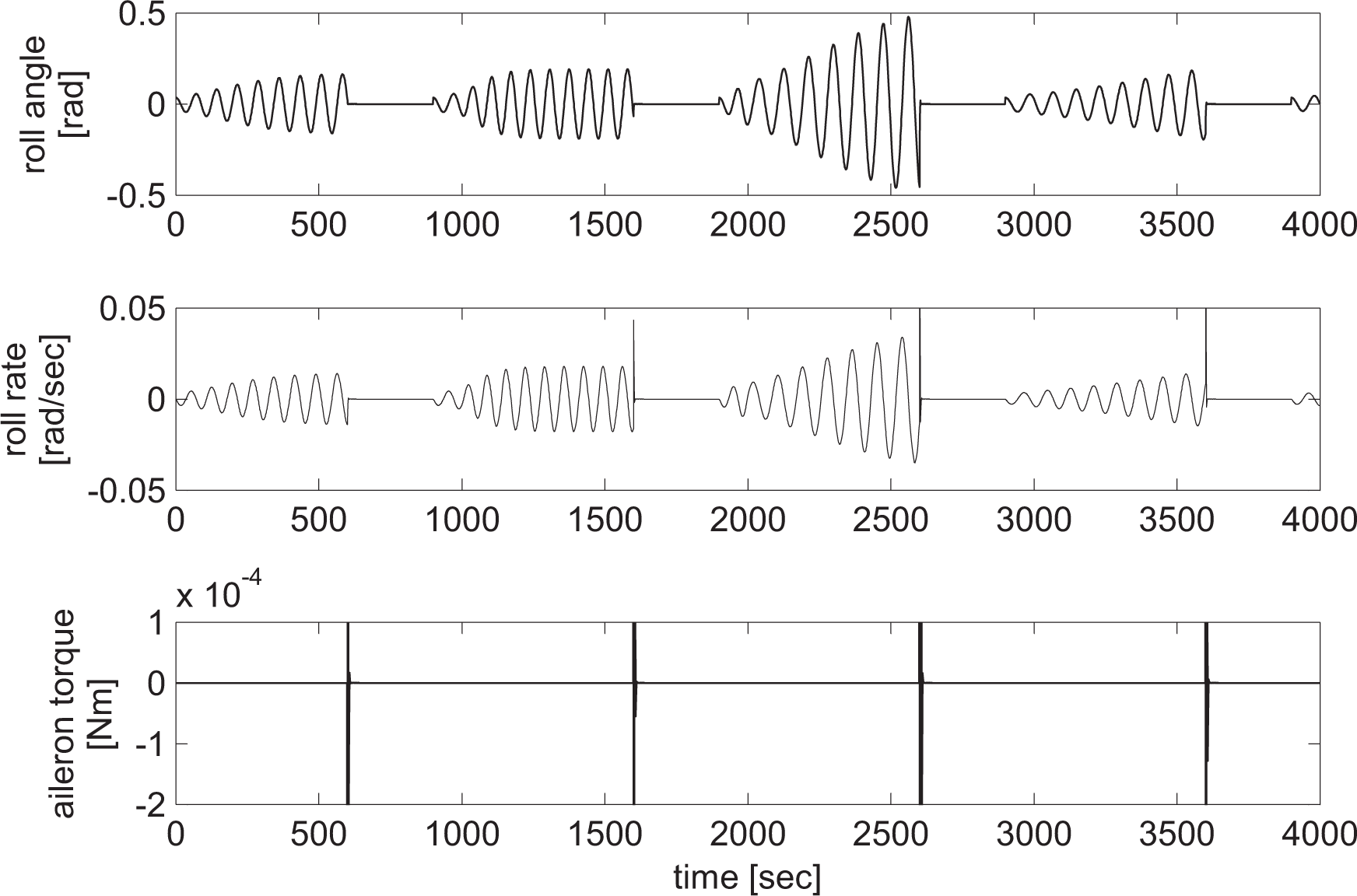
Simulation results: operation under nominal conditions.
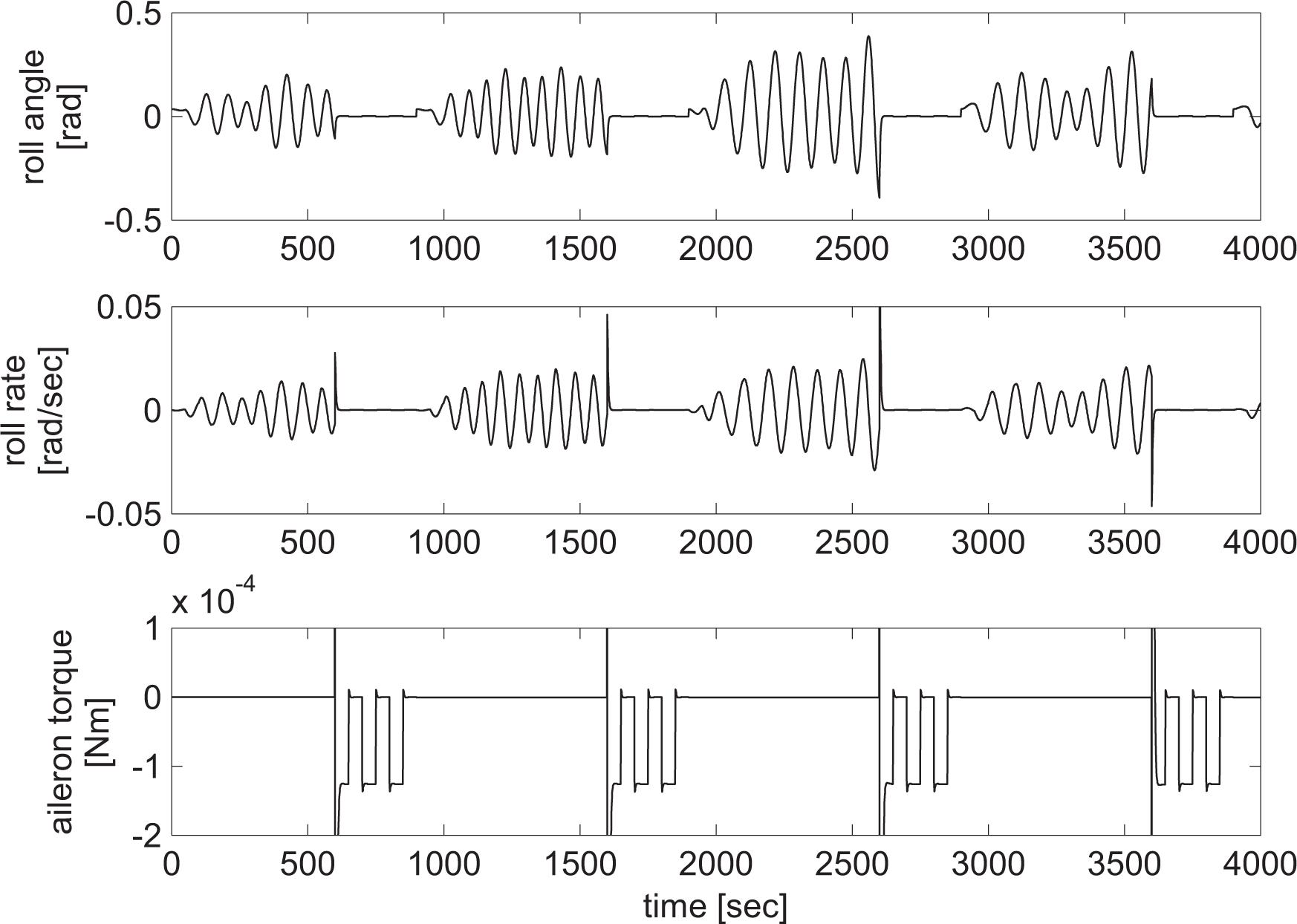
Simulation results: operation under uncertain conditions.
5. Conclusions
In this paper, the CT results have been applied to the problem of WR motion. In order to cancel the uncertainties and disturbances, a nonlinear state-feedback DOB based on the UDE strategy is employed. Both nominal and robust control strategies have been developed. The proposed algorithms have demonstrated excellent performance in suppressing the WR oscillations under both nominal and uncertain conditions.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.