To construct various confidence intervals of mean response times for an open queueing network model with feedback, the calibration approach is used. In this paper, a data-based recurrence relation is used to compute a sequence of response times. Sample means from those response times are used to estimate true mean response times. With the help of numerical simulation study, we investigate the accuracy of the different calibrated confidence intervals of mean response times by calculating the coverage percentage and average length.
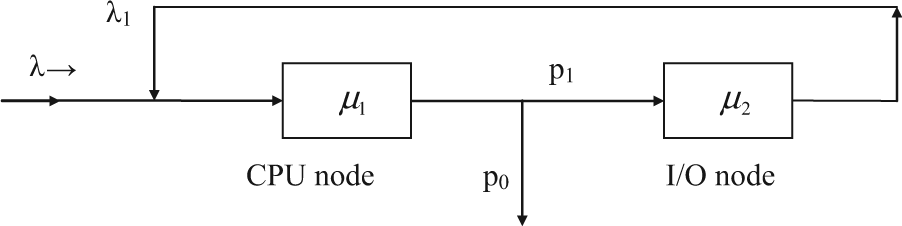
The response time is defined as the time spent by a customer from arrival until it departs. Consider a network model of a computer system with feedback in which a job may return to previously visited nodes. The system consists of a central processing unit (CPU) node and an input/output (I/O) node with respective service rates and . The external arrival rate is . After service completion at the CPU node, the job proceeds to the I/O node with probability p1, and departs from the system with probability p0, where p0 = 1 –p1. Jobs leaving the I/O node are always fed back to the CPU node (Figure 1). The successive service time at both nodes is assumed to be mutually independent and independent of the state of the system. The traffic intensity at the CPU node and I/O node is respectively given by
Two-stage open queueing network with feedback.
Intensity and can be interpreted as expected number of arrivals per mean service time. The condition for stability of the system is that both and are less than unity.
Statistical inference in queueing networks with feedback is rarely found in the literature and the work related in the past mainly concentrates on only parametric statistical inference, in which the distribution of population is with a known form. Basic properties of queueing networks are introduced by Disney.1 Jackson’s theorem states that each node behaves like an independent queue.2 Thiruvaiyaru et al.3 established that maximum likelihood estimators of the parameters of an open Jackson network are derived, and their joint asymptotic normality. Open queueing networks are useful in studying the behavior of computer communication networks.4
So far very few authors have studied the nonparametric statistical inferences. Efron5–7 originally developed and proposed the bootstrap, which is a resampling technique that can be effectively applied to estimate the sampling distribution of any statistic. Gedam and Pathare8–11 have studied the nonparametric statistical estimation approaches of various queueing network models. Chu and Ke12 examined the statistical behavior of the mean response time for the M/G/1 queueing system using bootstrapping simulation. These same authors studied the interval estimation of mean response time for a G/M/1 queueing system using the empirical Laplace function approach.13 Chu and Ke also developed a data-based recurrence relation to compute a sequence of mean response times and constructed confidence intervals of mean response times for the G/G/1 queueing system using simulation.14
There is hardly any work regarding the use of the calibration technique in queueing networks with feedback. This motivates us to develop the nonparametric statistical inference of mean response time for a queueing network model with the feedback and use calibration technique to construct confidence intervals for mean response times and . The calibration technique is used for improving the coverage accuracy of any system of approximate confidence intervals. The idea of the bootstrap calibration technique is to first use bootstrap to estimate the true coverage of confidence intervals and the intervals are then adjusted by comparing with the target nominal level.
Nonparametric inference for estimating mean response time is discussed in Section 2 and the calibration technique is discussed in Section 3. In Sections 4–11 we have proposed different calibrated confidence intervals for mean response time. In Section 12, a numerical simulation study is conducted. All simulation results are shown by appropriate tables for illustrating performances of all estimation approaches. In Section 13 some conclusions are given.
2. Nonparametric estimation approach for mean response time
Let be the nonnegative continuous random variables representing respectively inter-arrival times and service times of the CPU node and I/O node of a queueing network with feedback. The random variables are independent of .
Let be a random sample drawn from that represents inter-arrival time and service time for the jth customer at the CPU node of a queueing network with feedback. Let be a random sample drawn from that represents inter-arrival time and service time for the jth customer at the I/O node of a queueing network with feedback.
Let represent the response time of the jth customer at the CPU node of a queueing network with feedback, which is determined from . Similarly, represents the response time of the jth customer at the I/O node of a queueing network with feedback and is determined from .
Let represent the waiting time of the jth customer at the ith node of a queueing network with feedback. Then
With the help of analysis by Kleinrock,4 we can evaluate the using recurrence relation given by
for and , where denotes the indicator function. Using Equation (1), we get
for and . Equations (4) and (5) are the exact data-based recurrence relations for calculating response times that are exactly as a sequence of a customer’s response times for a queueing network with feedback, hence
the arithmetic mean of these response times is a natural estimator of the mean response times , i = 1,2 for a queueing network with feedback.
According to the Strong Law of Large Numbers,15 we know that , i = 1,2 is a strongly consistent estimator of , i = 1,2. The true distributions of are not often known in practice, so the exact distributions of , i = 1,2 cannot be derived. However, under the assumption of and being independent, the asymptotical distributions of , i = 1,2 can be developed. By Slutsky’s theorem,16 we have
where , is the variance of and denotes convergence in distribution. Then , is a strongly consistent estimator of . Again applying Slutsky’s theorem, we have
Thus, , i = 1,2 is a strongly consistent and asymptotically normal (CAN) estimator with approximate variances
3. Calibration technique
The actual coverage of a confidence interval procedure is rarely equal to the desired (nominal) coverage and often is substantially different. One way to think about the coverage accuracy of a confidence procedure is in terms of its calibration. We could construct a confidence procedure with exactly the desired coverage. Each calibration brings another order of accuracy but at a formidable computational cost. The calibration process produces a second-order accurate confidence point.17 As the calibration technique is used for improving the coverage accuracy of any system of approximate confidence intervals, we think that it is important to improve the accuracy of confidence intervals of mean response times in practical cases also. The bootstrap can be used to carry out the calibration.
The general theory of calibration is reviewed by Efron and Tibshirani,17 following the ideas of Loh,18 Beran,19 Hall20 and Hall and Martin.21 The bootstrap calibration technique was introduced by Loh.18,22 Let a confidence limit have probability of covering the true value , that is , where is unknown continuous probability distribution. For an approximate confidence limit there is true probability that is less than , say . If we knew the function then we could calibrate an approximate confidence interval to give exact coverage. Suppose we know that . Then instead of , we would use to get a central 90% interval with correct coverage probabilities.
In practice we usually do not know the calibration function . However, we can use the bootstrap to estimate . The bootstrap estimate of is , where and are fixed, while is the αth confidence limit based on the bootstrap dataset from . The estimate is obtained by taking B bootstrap datasets and seeing what proportion of them have .
4. Consistent and asymptotically normal calibrated confidence interval and normal calibrated confidence intervals for mean response time
Using CAN estimators , i = 1,2 and their associated approximate variances , i = 1,2, we construct calibrated confidence intervals for , i = 1,2. Let be the upper αth quantile of the standard normal distribution. Compute and . Then approximately calibrated confidence intervals for , i = 1,2 are given by
For a sufficiently large value of n, the CAN calibrated confidence intervals approaches to normal calibrated confidence intervals.
5. Student’s t calibrated confidence intervals (exact-t)
Let be the upper αth quantile of the Student’s t-distribution. Compute and . Then the Student’s t calibrated confidence intervals for , i = 1,2 are given as
6. Standard bootstrap calibrated confidence intervals
According to the bootstrap procedure, a simple random sample and called a bootstrap sample is taken from the empirical distribution function of and , respectively. Using Equations (4) and (5), we can obtain as a sequence of customer’s response time. Similarly we can obtain . It follows that is a natural estimate of the mean response time , i = 1,2 for a queueing network. is called the bootstrap estimate of . The above resampling process can be repeated N times. The N bootstrap estimates can be computed from the bootstrap resample. Averaging the N bootstrap estimates, we get that is the bootstrap estimate of , i = 1,2 and the standard deviation of , can be estimated by . By central limit theorem, the distribution of is approximately normal. After computing and we get standard bootstrap (SB) calibrated confidence intervals for , i = 1,2 as
7. Bootstrap-t calibrated confidence intervals
Considering N bootstrap estimates computed from the bootstrap resample, we compute . Further follows an approximate t-distribution. Also compute and . Then we get bootstrap-t calibrated confidence intervals for , i = 1,2 as
where equals the percentile of the random sample .
Let be a strongly CAN estimator with approximate variances . Let . We find a transformation such that . By the first-order Taylor series expansion and taking expectations on both sides, we get
Now consider is the variance-stabilizing transformation. Then we have
Here we consider N bootstrap estimates computed from the bootstrap resample. We calculate . Also compute and . Then we have variance-stabilized bootstrap-t (VST) calibrated confidence intervals for , i = 1,2 as
Now call the bootstrap distribution of . Let be the order statistics of . Compute and . Then utilizing the and percentage points of the bootstrap distribution, percentile bootstrap (PB) calibrated confidence intervals for , i = 1,2 are obtained as
where [x] denotes the greatest integer less than or equal to x.
10. Bias-corrected and accelerated bootstrap calibrated confidence intervals
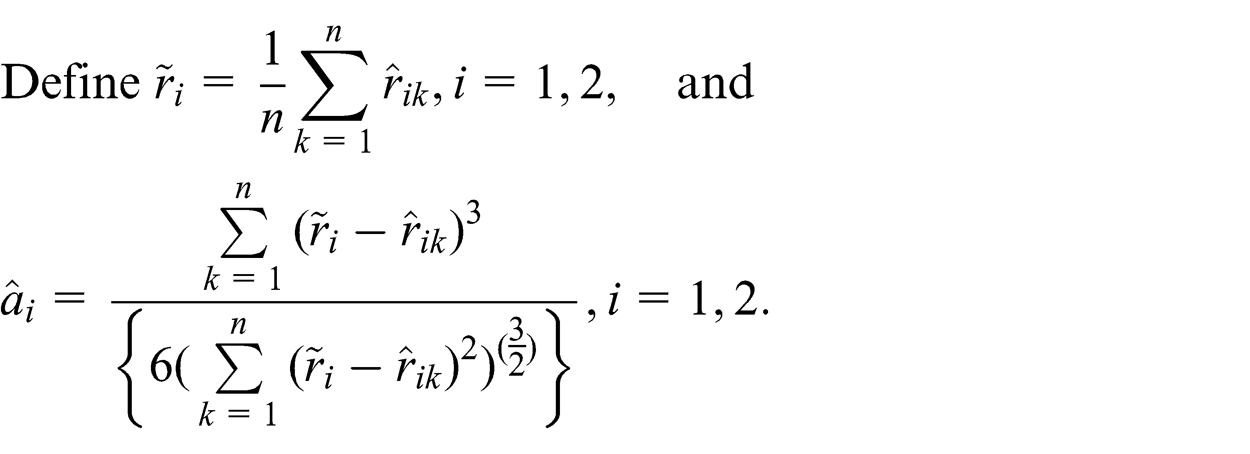
The bootstrap distribution may be biased. The PB calibrated confidence interval for mean response time is designed to correct this potential bias. Set , where is the indicator function. Define , where denotes the inverse function of the standard normal distribution . Except for correcting the potential bias of the bootstrap distribution, we can accelerate the convergence of bootstrap distribution. Let denote the original samples with the kth observation deleted; also let be the estimator of , i = 1,2 calculated by using .
and are named bias-correction and acceleration, respectively. Also compute and , where .
Thus, bias-corrected and accelerated bootstrap (BCaB) calibrated confidence intervals for , i = 1,2 are
Set , where I(.) is the indicator function. Define , where denotes the inverse function of the standard normal distribution . Then and . Then compute and . Further 100(1-α)% bias-corrected percentile bootstrap (BCPB) calibrated confidence intervals for mean response time , i = 1,2 are
where [x] denotes the greatest integer less than or equal to x.
12. Simulation study
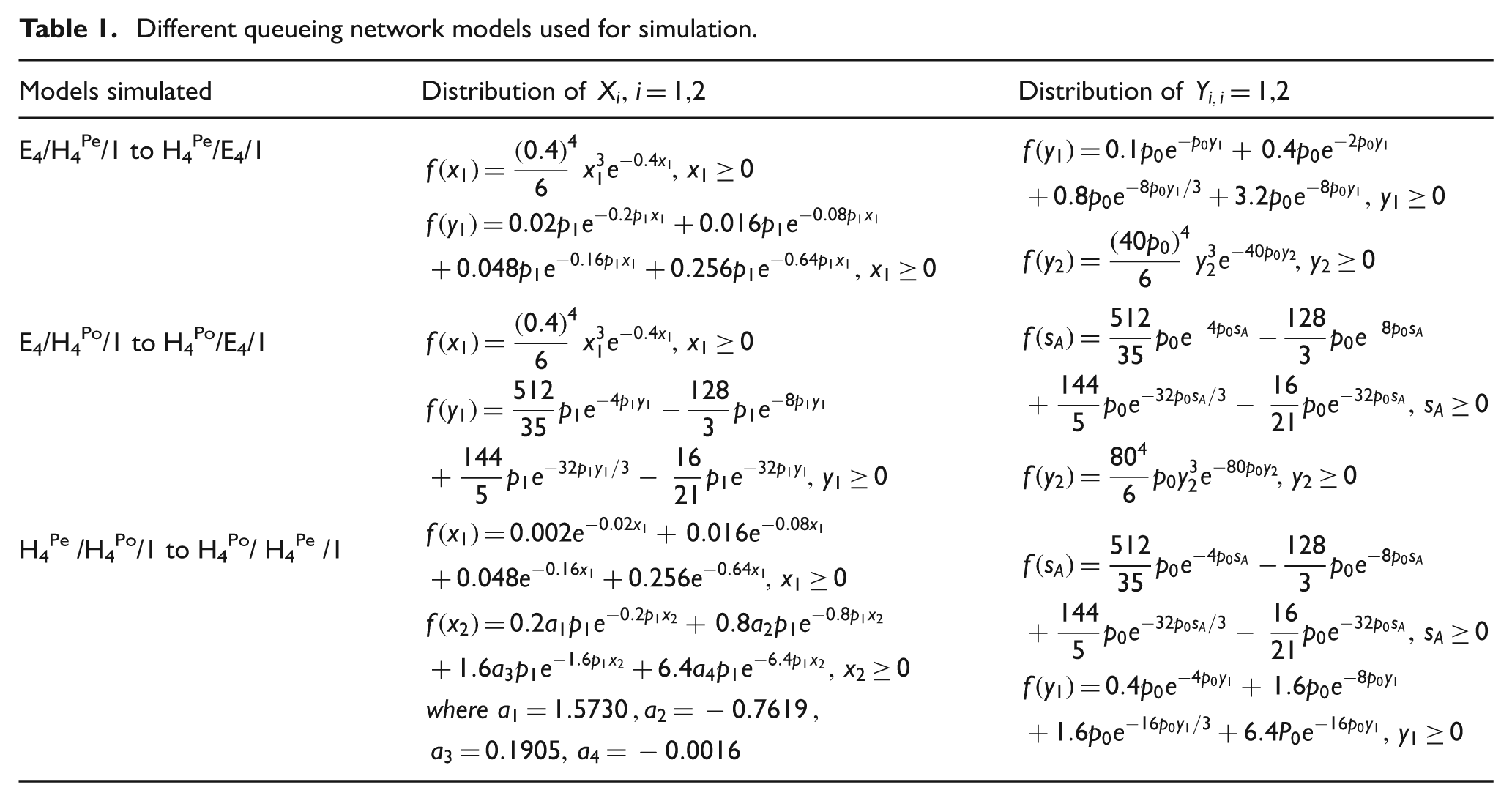
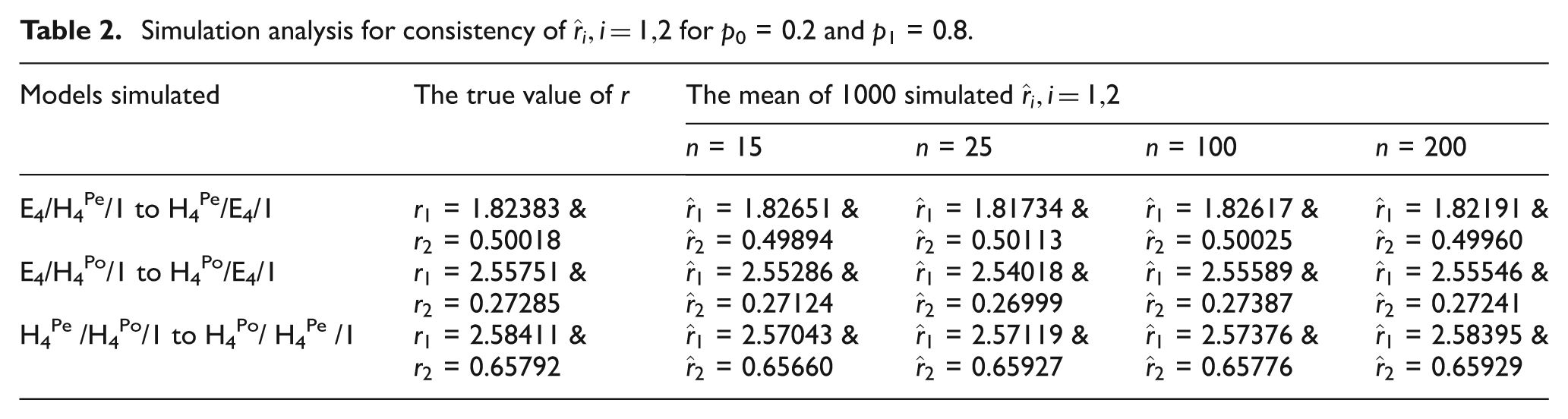
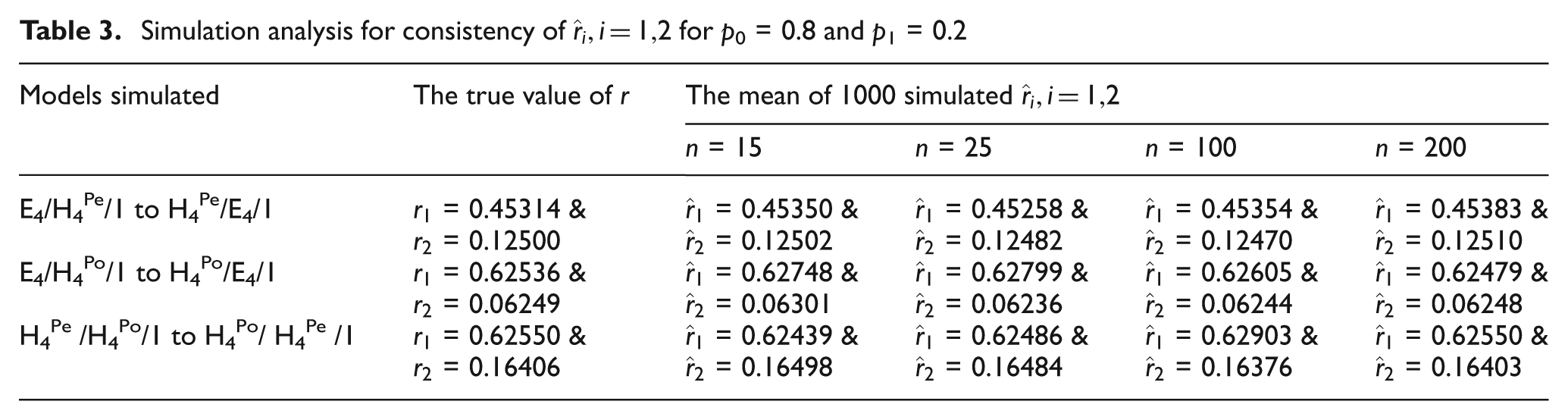
To evaluate performances of calibrated confidence intervals for mean response times of a queueing network with feedback, a numerical simulation study was undertaken. The consistency of , i = 1,2 is examined by comparing the true value of , i = 1,2 with the average of simulated estimates , i = 1,2, whereas the different calibrated confidence intervals are assessed in terms of their coverage percentages and average length. In order to achieve these goals, we select three different queueing network modes with feedback: E4/H4Pe/1 to H4Pe/E4/1, E4/H4Po/1 to H4Po/E4/1 and H4Pe /H4Po/1 to H4Po/ H4Pe /1, where represents a four-stage Erlang distribution, a four-stage hyper-exponential distribution and a four-stage hypo-exponential distribution.
The distributions of and , as well as the corresponding true mean values of mean response times , i = 1,2 for the three different queueing network models, are shown in Tables 1–3. With regards to E4/H4Pe/1 to H4Pe/E4/1, E4/H4Po/1 toH4Po/E4/1 and H4Pe /H4Po/1 to H4Po/ H4Pe /1 queueing network modes with feedback, there is no theoretical formula for the true value of , i = 1,2. Using the strong law of large numbers, we have estimated the true value of , i = 1,2 by the simulated sample values of , i = 1,2 with sufficiently large sample size. For queueing network models in Table 1, the approximated values of , i = 1,2 are obtained from the simulated sample values of , i = 1,2 with sample size n = 107. We find that the approximated mean response time approaches to the true value of , i = 1,2 when n≥107.
Different queueing network models used for simulation.
Models simulated
Distribution of
Distribution of
E4/H4Pe/1 to H4Pe/E4/1
E4/H4Po/1 to H4Po/E4/1
H4Pe /H4Po/1 to H4Po/ H4Pe /1
Simulation analysis for consistency of for p0 = 0.2 and p1 = 0.8.
Models simulated
The true value of r
The mean of 1000 simulated
n = 15
n = 25
n = 100
n = 200
E4/H4Pe/1 to H4Pe/E4/1
= 1.82383 & = 0.50018
= 1.82651 & = 0.49894
= 1.81734 & = 0.50113
= 1.82617 & = 0.50025
= 1.82191 & = 0.49960
E4/H4Po/1 to H4Po/E4/1
= 2.55751 & = 0.27285
= 2.55286 & = 0.27124
= 2.54018 & = 0.26999
= 2.55589 & = 0.27387
= 2.55546 & = 0.27241
H4Pe /H4Po/1 to H4Po/ H4Pe /1
= 2.58411 & = 0.65792
= 2.57043 & = 0.65660
= 2.57119 & = 0.65927
= 2.57376 & = 0.65776
= 2.58395 & = 0.65929
Simulation analysis for consistency of for p0 = 0.8 and p1 = 0.2
Models simulated
The true value of r
The mean of 1000 simulated
n = 15
n = 25
n = 100
n = 200
E4/H4Pe/1 to H4Pe/E4/1
= 0.45314 & = 0.12500
= 0.45350 & = 0.12502
= 0.45258 & = 0.12482
= 0.45354 & = 0.12470
= 0.45383 & = 0.12510
E4/H4Po/1 to H4Po/E4/1
= 0.62536 & = 0.06249
= 0.62748 & = 0.06301
= 0.62799 & = 0.06236
= 0.62605 & = 0.06244
= 0.62479 & = 0.06248
H4Pe /H4Po/1 to H4Po/ H4Pe /1
= 0.62550 & = 0.16406
= 0.62439 & = 0.16498
= 0.62486 & = 0.16484
= 0.62903 & = 0.16376
= 0.62550 & = 0.16403
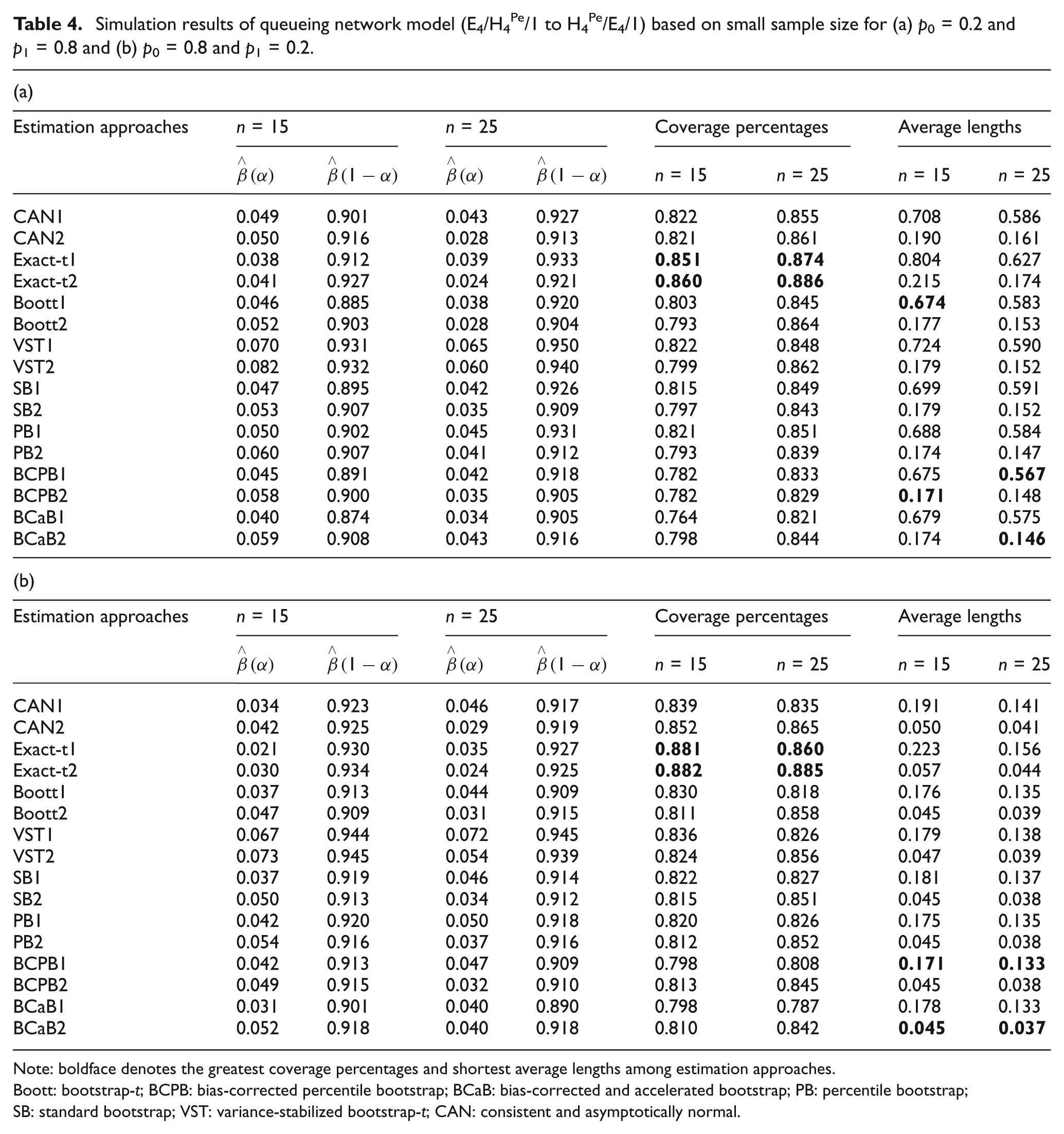
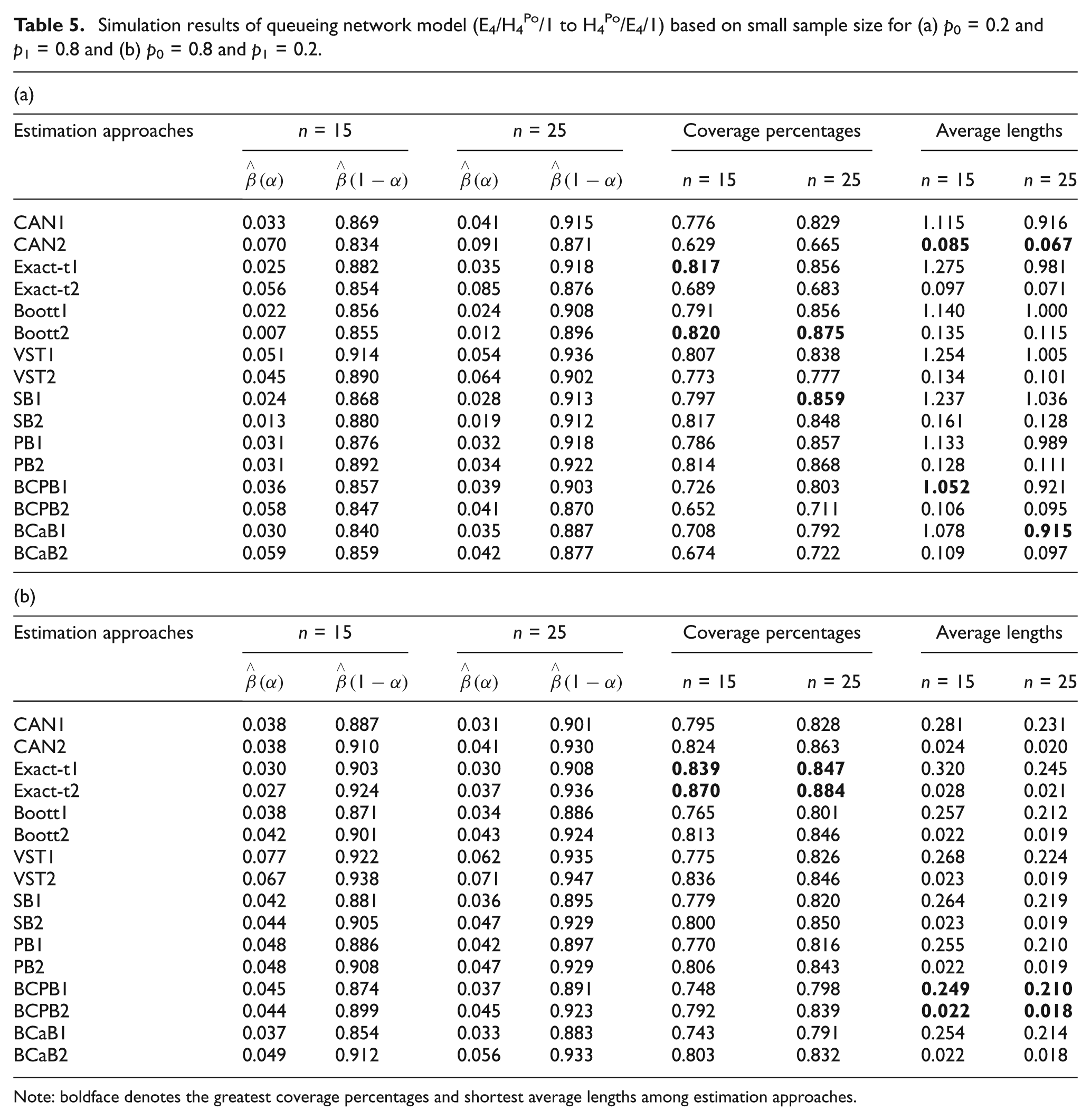
Thus, for each specified queueing network model with feedback in Table 1, a random sample of size n (= 15, 25, 100, 200) is drawn from the original samples. Using recurrence relations (4) and (5), the natural estimates , i = 1,2 are calculated. Further B = 1000 bootstrap re-samples are drawn from the original samples. According to Equations (7)–(14) we obtain CAN/Normal, Exact-t, SB, bootstrap-t (Boott), VST, PB, BCaB and BCPB calibrated confidence intervals for response time , i = 1,2 with confidence level 90%. The above simulation process is replicated N = 1000 times and we have computed coverage percentages and average lengths. We utilize Matlab to accomplish all simulations. All simulated results are displayed in Tables 2–9. The consistency property of the natural estimator , i = 1,2 is demonstrated by Tables 2 and 3, but the performance of the calibrated confidence interval for , i = 1,2 can be examined in terms of Tables 4–9.
Simulation results of queueing network model (E4/H4Pe/1 to H4Pe/E4/1) based on small sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.049
0.901
0.043
0.927
0.822
0.855
0.708
0.586
CAN2
0.050
0.916
0.028
0.913
0.821
0.861
0.190
0.161
Exact-t1
0.038
0.912
0.039
0.933
0.851
0.874
0.804
0.627
Exact-t2
0.041
0.927
0.024
0.921
0.860
0.886
0.215
0.174
Boott1
0.046
0.885
0.038
0.920
0.803
0.845
0.674
0.583
Boott2
0.052
0.903
0.028
0.904
0.793
0.864
0.177
0.153
VST1
0.070
0.931
0.065
0.950
0.822
0.848
0.724
0.590
VST2
0.082
0.932
0.060
0.940
0.799
0.862
0.179
0.152
SB1
0.047
0.895
0.042
0.926
0.815
0.849
0.699
0.591
SB2
0.053
0.907
0.035
0.909
0.797
0.843
0.179
0.152
PB1
0.050
0.902
0.045
0.931
0.821
0.851
0.688
0.584
PB2
0.060
0.907
0.041
0.912
0.793
0.839
0.174
0.147
BCPB1
0.045
0.891
0.042
0.918
0.782
0.833
0.675
0.567
BCPB2
0.058
0.900
0.035
0.905
0.782
0.829
0.171
0.148
BCaB1
0.040
0.874
0.034
0.905
0.764
0.821
0.679
0.575
BCaB2
0.059
0.908
0.043
0.916
0.798
0.844
0.174
0.146
(b)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.034
0.923
0.046
0.917
0.839
0.835
0.191
0.141
CAN2
0.042
0.925
0.029
0.919
0.852
0.865
0.050
0.041
Exact-t1
0.021
0.930
0.035
0.927
0.881
0.860
0.223
0.156
Exact-t2
0.030
0.934
0.024
0.925
0.882
0.885
0.057
0.044
Boott1
0.037
0.913
0.044
0.909
0.830
0.818
0.176
0.135
Boott2
0.047
0.909
0.031
0.915
0.811
0.858
0.045
0.039
VST1
0.067
0.944
0.072
0.945
0.836
0.826
0.179
0.138
VST2
0.073
0.945
0.054
0.939
0.824
0.856
0.047
0.039
SB1
0.037
0.919
0.046
0.914
0.822
0.827
0.181
0.137
SB2
0.050
0.913
0.034
0.912
0.815
0.851
0.045
0.038
PB1
0.042
0.920
0.050
0.918
0.820
0.826
0.175
0.135
PB2
0.054
0.916
0.037
0.916
0.812
0.852
0.045
0.038
BCPB1
0.042
0.913
0.047
0.909
0.798
0.808
0.171
0.133
BCPB2
0.049
0.915
0.032
0.910
0.813
0.845
0.045
0.038
BCaB1
0.031
0.901
0.040
0.890
0.798
0.787
0.178
0.133
BCaB2
0.052
0.918
0.040
0.918
0.810
0.842
0.045
0.037
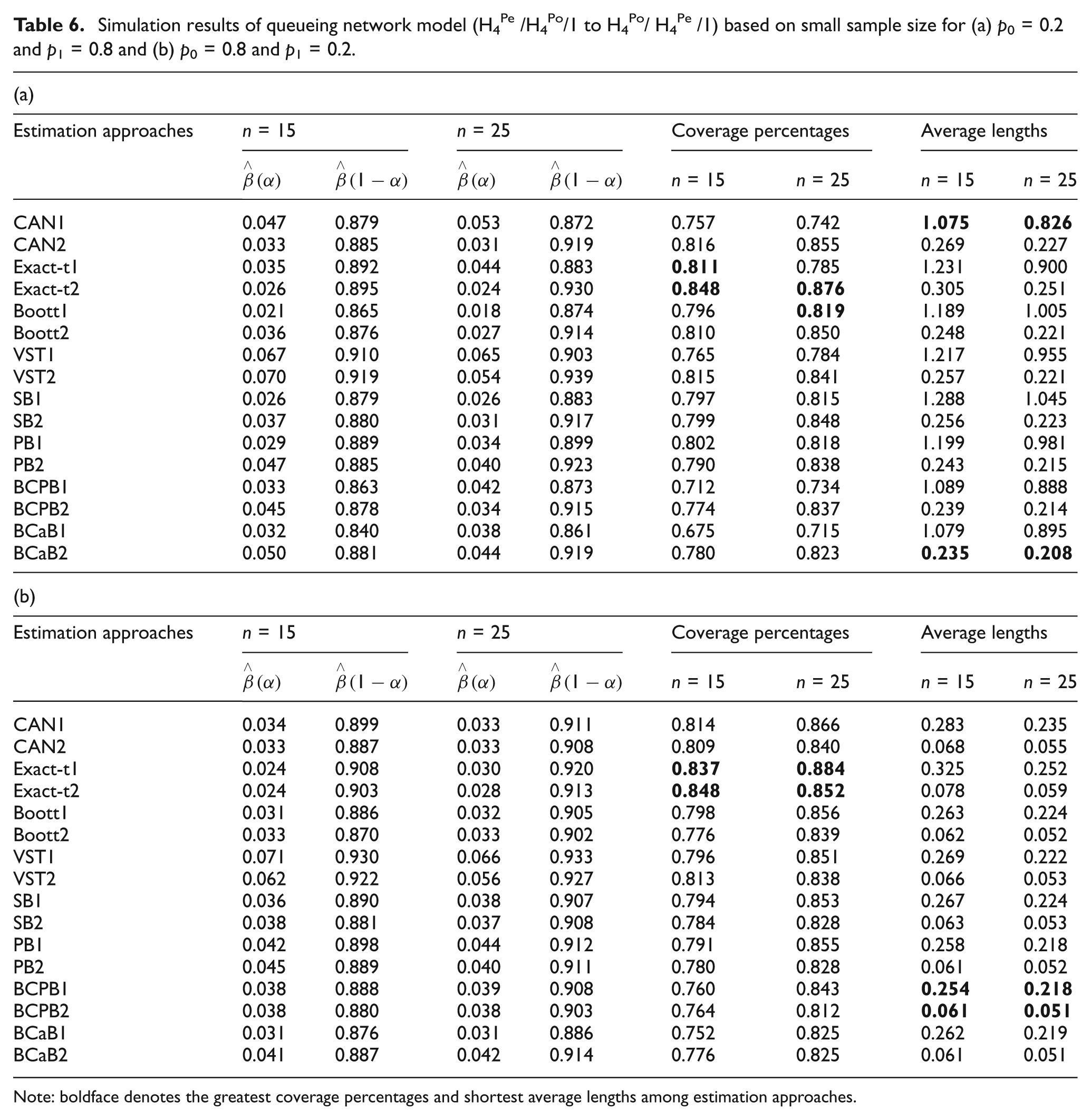
Note: boldface denotes the greatest coverage percentages and shortest average lengths among estimation approaches. Boott: bootstrap-t; BCPB: bias-corrected percentile bootstrap; BCaB: bias-corrected and accelerated bootstrap; PB: percentile bootstrap; SB: standard bootstrap; VST: variance-stabilized bootstrap-t; CAN: consistent and asymptotically normal.
Simulation results of queueing network model (E4/H4Po/1 to H4Po/E4/1) based on small sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.033
0.869
0.041
0.915
0.776
0.829
1.115
0.916
CAN2
0.070
0.834
0.091
0.871
0.629
0.665
0.085
0.067
Exact-t1
0.025
0.882
0.035
0.918
0.817
0.856
1.275
0.981
Exact-t2
0.056
0.854
0.085
0.876
0.689
0.683
0.097
0.071
Boott1
0.022
0.856
0.024
0.908
0.791
0.856
1.140
1.000
Boott2
0.007
0.855
0.012
0.896
0.820
0.875
0.135
0.115
VST1
0.051
0.914
0.054
0.936
0.807
0.838
1.254
1.005
VST2
0.045
0.890
0.064
0.902
0.773
0.777
0.134
0.101
SB1
0.024
0.868
0.028
0.913
0.797
0.859
1.237
1.036
SB2
0.013
0.880
0.019
0.912
0.817
0.848
0.161
0.128
PB1
0.031
0.876
0.032
0.918
0.786
0.857
1.133
0.989
PB2
0.031
0.892
0.034
0.922
0.814
0.868
0.128
0.111
BCPB1
0.036
0.857
0.039
0.903
0.726
0.803
1.052
0.921
BCPB2
0.058
0.847
0.041
0.870
0.652
0.711
0.106
0.095
BCaB1
0.030
0.840
0.035
0.887
0.708
0.792
1.078
0.915
BCaB2
0.059
0.859
0.042
0.877
0.674
0.722
0.109
0.097
(b)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.038
0.887
0.031
0.901
0.795
0.828
0.281
0.231
CAN2
0.038
0.910
0.041
0.930
0.824
0.863
0.024
0.020
Exact-t1
0.030
0.903
0.030
0.908
0.839
0.847
0.320
0.245
Exact-t2
0.027
0.924
0.037
0.936
0.870
0.884
0.028
0.021
Boott1
0.038
0.871
0.034
0.886
0.765
0.801
0.257
0.212
Boott2
0.042
0.901
0.043
0.924
0.813
0.846
0.022
0.019
VST1
0.077
0.922
0.062
0.935
0.775
0.826
0.268
0.224
VST2
0.067
0.938
0.071
0.947
0.836
0.846
0.023
0.019
SB1
0.042
0.881
0.036
0.895
0.779
0.820
0.264
0.219
SB2
0.044
0.905
0.047
0.929
0.800
0.850
0.023
0.019
PB1
0.048
0.886
0.042
0.897
0.770
0.816
0.255
0.210
PB2
0.048
0.908
0.047
0.929
0.806
0.843
0.022
0.019
BCPB1
0.045
0.874
0.037
0.891
0.748
0.798
0.249
0.210
BCPB2
0.044
0.899
0.045
0.923
0.792
0.839
0.022
0.018
BCaB1
0.037
0.854
0.033
0.883
0.743
0.791
0.254
0.214
BCaB2
0.049
0.912
0.056
0.933
0.803
0.832
0.022
0.018
Note: boldface denotes the greatest coverage percentages and shortest average lengths among estimation approaches.
Simulation results of queueing network model (H4Pe /H4Po/1 to H4Po/ H4Pe /1) based on small sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.047
0.879
0.053
0.872
0.757
0.742
1.075
0.826
CAN2
0.033
0.885
0.031
0.919
0.816
0.855
0.269
0.227
Exact-t1
0.035
0.892
0.044
0.883
0.811
0.785
1.231
0.900
Exact-t2
0.026
0.895
0.024
0.930
0.848
0.876
0.305
0.251
Boott1
0.021
0.865
0.018
0.874
0.796
0.819
1.189
1.005
Boott2
0.036
0.876
0.027
0.914
0.810
0.850
0.248
0.221
VST1
0.067
0.910
0.065
0.903
0.765
0.784
1.217
0.955
VST2
0.070
0.919
0.054
0.939
0.815
0.841
0.257
0.221
SB1
0.026
0.879
0.026
0.883
0.797
0.815
1.288
1.045
SB2
0.037
0.880
0.031
0.917
0.799
0.848
0.256
0.223
PB1
0.029
0.889
0.034
0.899
0.802
0.818
1.199
0.981
PB2
0.047
0.885
0.040
0.923
0.790
0.838
0.243
0.215
BCPB1
0.033
0.863
0.042
0.873
0.712
0.734
1.089
0.888
BCPB2
0.045
0.878
0.034
0.915
0.774
0.837
0.239
0.214
BCaB1
0.032
0.840
0.038
0.861
0.675
0.715
1.079
0.895
BCaB2
0.050
0.881
0.044
0.919
0.780
0.823
0.235
0.208
(b)
Estimation approaches
n = 15
n = 25
Coverage percentages
Average lengths
n = 15
n = 25
n = 15
n = 25
CAN1
0.034
0.899
0.033
0.911
0.814
0.866
0.283
0.235
CAN2
0.033
0.887
0.033
0.908
0.809
0.840
0.068
0.055
Exact-t1
0.024
0.908
0.030
0.920
0.837
0.884
0.325
0.252
Exact-t2
0.024
0.903
0.028
0.913
0.848
0.852
0.078
0.059
Boott1
0.031
0.886
0.032
0.905
0.798
0.856
0.263
0.224
Boott2
0.033
0.870
0.033
0.902
0.776
0.839
0.062
0.052
VST1
0.071
0.930
0.066
0.933
0.796
0.851
0.269
0.222
VST2
0.062
0.922
0.056
0.927
0.813
0.838
0.066
0.053
SB1
0.036
0.890
0.038
0.907
0.794
0.853
0.267
0.224
SB2
0.038
0.881
0.037
0.908
0.784
0.828
0.063
0.053
PB1
0.042
0.898
0.044
0.912
0.791
0.855
0.258
0.218
PB2
0.045
0.889
0.040
0.911
0.780
0.828
0.061
0.052
BCPB1
0.038
0.888
0.039
0.908
0.760
0.843
0.254
0.218
BCPB2
0.038
0.880
0.038
0.903
0.764
0.812
0.061
0.051
BCaB1
0.031
0.876
0.031
0.886
0.752
0.825
0.262
0.219
BCaB2
0.041
0.887
0.042
0.914
0.776
0.825
0.061
0.051
Note: boldface denotes the greatest coverage percentages and shortest average lengths among estimation approaches.
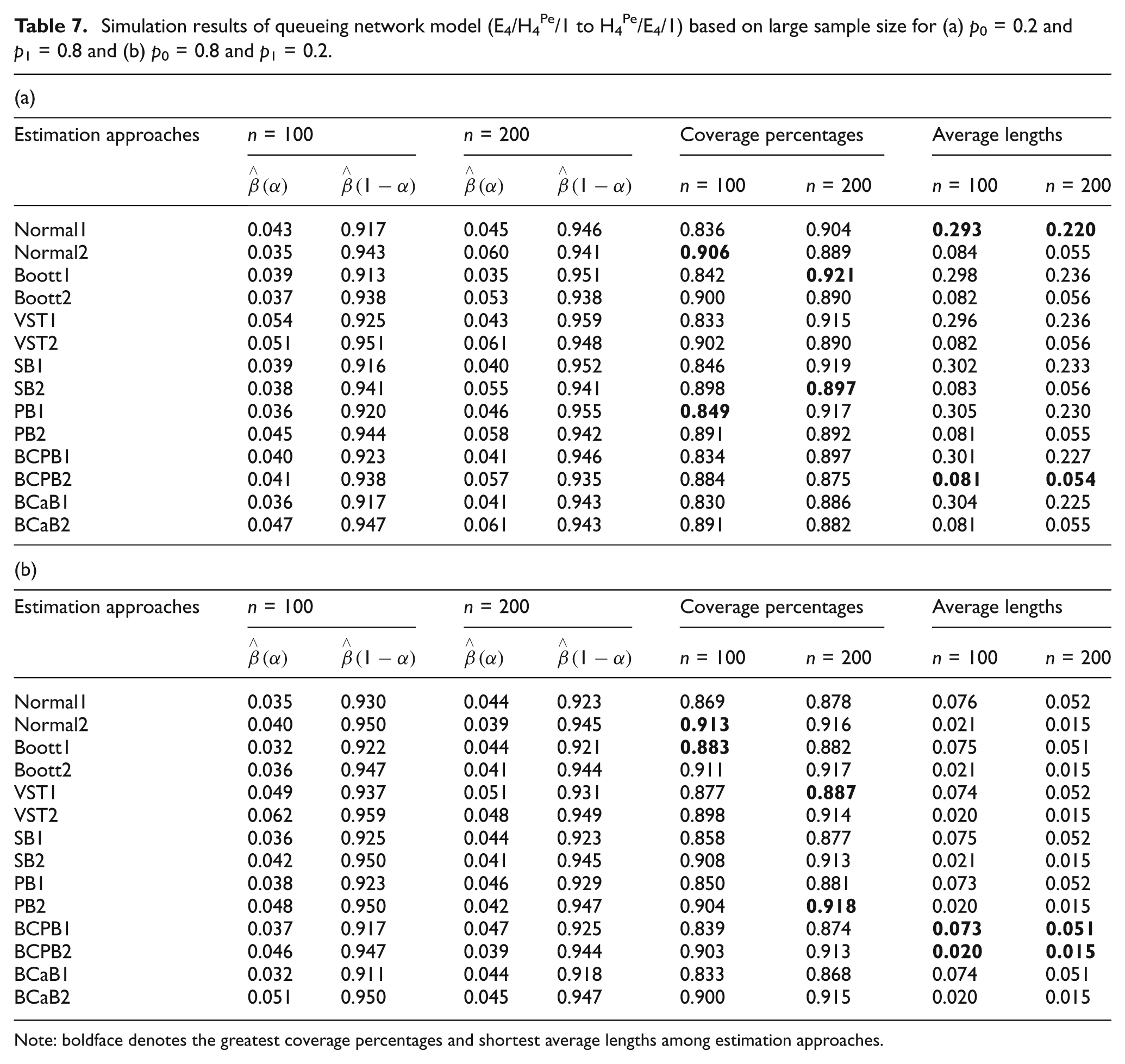
Simulation results of queueing network model (E4/H4Pe/1 to H4Pe/E4/1) based on large sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.043
0.917
0.045
0.946
0.836
0.904
0.293
0.220
Normal2
0.035
0.943
0.060
0.941
0.906
0.889
0.084
0.055
Boott1
0.039
0.913
0.035
0.951
0.842
0.921
0.298
0.236
Boott2
0.037
0.938
0.053
0.938
0.900
0.890
0.082
0.056
VST1
0.054
0.925
0.043
0.959
0.833
0.915
0.296
0.236
VST2
0.051
0.951
0.061
0.948
0.902
0.890
0.082
0.056
SB1
0.039
0.916
0.040
0.952
0.846
0.919
0.302
0.233
SB2
0.038
0.941
0.055
0.941
0.898
0.897
0.083
0.056
PB1
0.036
0.920
0.046
0.955
0.849
0.917
0.305
0.230
PB2
0.045
0.944
0.058
0.942
0.891
0.892
0.081
0.055
BCPB1
0.040
0.923
0.041
0.946
0.834
0.897
0.301
0.227
BCPB2
0.041
0.938
0.057
0.935
0.884
0.875
0.081
0.054
BCaB1
0.036
0.917
0.041
0.943
0.830
0.886
0.304
0.225
BCaB2
0.047
0.947
0.061
0.943
0.891
0.882
0.081
0.055
(b)
Estimation approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.035
0.930
0.044
0.923
0.869
0.878
0.076
0.052
Normal2
0.040
0.950
0.039
0.945
0.913
0.916
0.021
0.015
Boott1
0.032
0.922
0.044
0.921
0.883
0.882
0.075
0.051
Boott2
0.036
0.947
0.041
0.944
0.911
0.917
0.021
0.015
VST1
0.049
0.937
0.051
0.931
0.877
0.887
0.074
0.052
VST2
0.062
0.959
0.048
0.949
0.898
0.914
0.020
0.015
SB1
0.036
0.925
0.044
0.923
0.858
0.877
0.075
0.052
SB2
0.042
0.950
0.041
0.945
0.908
0.913
0.021
0.015
PB1
0.038
0.923
0.046
0.929
0.850
0.881
0.073
0.052
PB2
0.048
0.950
0.042
0.947
0.904
0.918
0.020
0.015
BCPB1
0.037
0.917
0.047
0.925
0.839
0.874
0.073
0.051
BCPB2
0.046
0.947
0.039
0.944
0.903
0.913
0.020
0.015
BCaB1
0.032
0.911
0.044
0.918
0.833
0.868
0.074
0.051
BCaB2
0.051
0.950
0.045
0.947
0.900
0.915
0.020
0.015
Note: boldface denotes the greatest coverage percentages and shortest average lengths among estimation approaches.
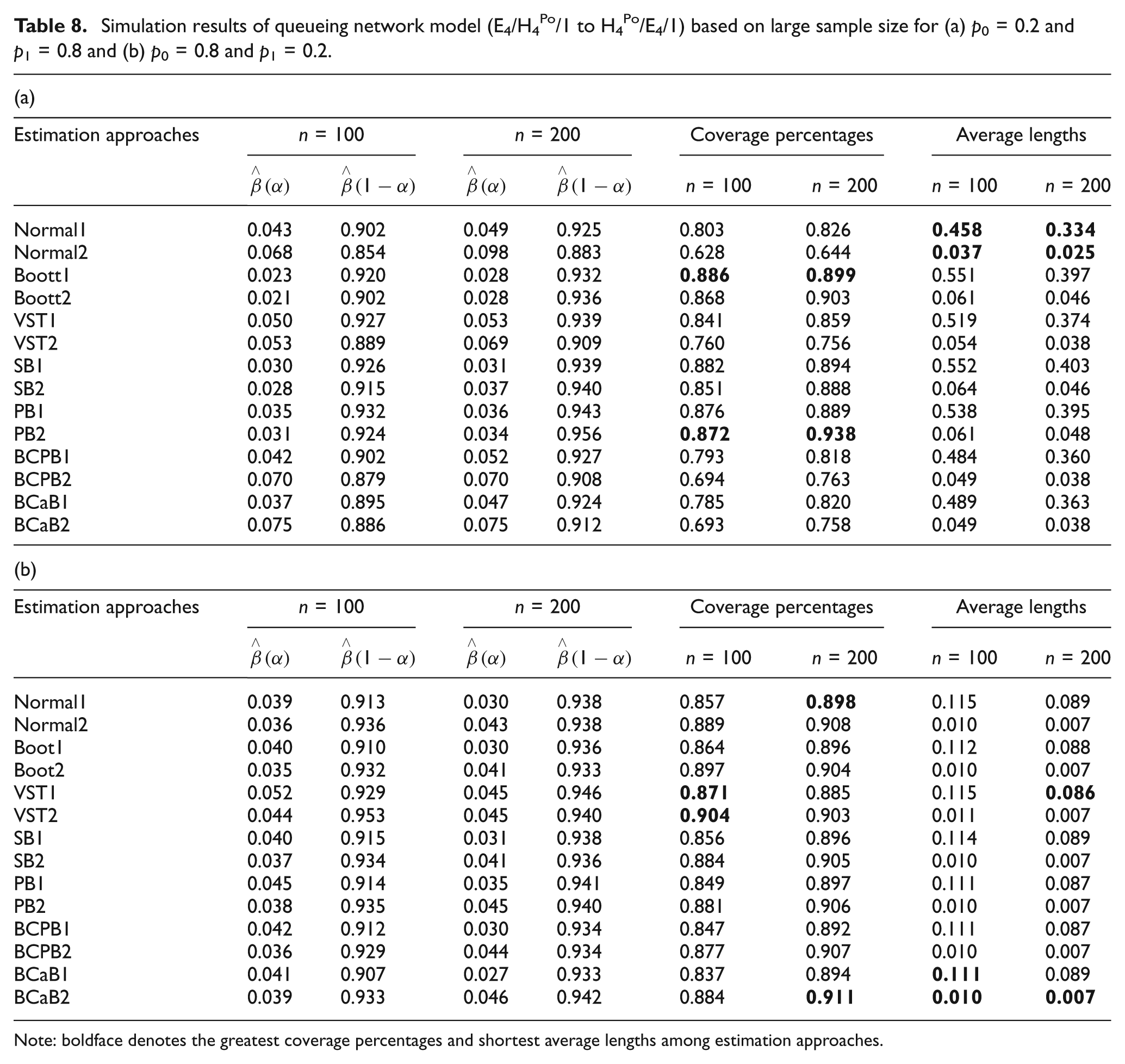
Simulation results of queueing network model (E4/H4Po/1 to H4Po/E4/1) based on large sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.043
0.902
0.049
0.925
0.803
0.826
0.458
0.334
Normal2
0.068
0.854
0.098
0.883
0.628
0.644
0.037
0.025
Boott1
0.023
0.920
0.028
0.932
0.886
0.899
0.551
0.397
Boott2
0.021
0.902
0.028
0.936
0.868
0.903
0.061
0.046
VST1
0.050
0.927
0.053
0.939
0.841
0.859
0.519
0.374
VST2
0.053
0.889
0.069
0.909
0.760
0.756
0.054
0.038
SB1
0.030
0.926
0.031
0.939
0.882
0.894
0.552
0.403
SB2
0.028
0.915
0.037
0.940
0.851
0.888
0.064
0.046
PB1
0.035
0.932
0.036
0.943
0.876
0.889
0.538
0.395
PB2
0.031
0.924
0.034
0.956
0.872
0.938
0.061
0.048
BCPB1
0.042
0.902
0.052
0.927
0.793
0.818
0.484
0.360
BCPB2
0.070
0.879
0.070
0.908
0.694
0.763
0.049
0.038
BCaB1
0.037
0.895
0.047
0.924
0.785
0.820
0.489
0.363
BCaB2
0.075
0.886
0.075
0.912
0.693
0.758
0.049
0.038
(b)
Estimation approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.039
0.913
0.030
0.938
0.857
0.898
0.115
0.089
Normal2
0.036
0.936
0.043
0.938
0.889
0.908
0.010
0.007
Boot1
0.040
0.910
0.030
0.936
0.864
0.896
0.112
0.088
Boot2
0.035
0.932
0.041
0.933
0.897
0.904
0.010
0.007
VST1
0.052
0.929
0.045
0.946
0.871
0.885
0.115
0.086
VST2
0.044
0.953
0.045
0.940
0.904
0.903
0.011
0.007
SB1
0.040
0.915
0.031
0.938
0.856
0.896
0.114
0.089
SB2
0.037
0.934
0.041
0.936
0.884
0.905
0.010
0.007
PB1
0.045
0.914
0.035
0.941
0.849
0.897
0.111
0.087
PB2
0.038
0.935
0.045
0.940
0.881
0.906
0.010
0.007
BCPB1
0.042
0.912
0.030
0.934
0.847
0.892
0.111
0.087
BCPB2
0.036
0.929
0.044
0.934
0.877
0.907
0.010
0.007
BCaB1
0.041
0.907
0.027
0.933
0.837
0.894
0.111
0.089
BCaB2
0.039
0.933
0.046
0.942
0.884
0.911
0.010
0.007
Note: boldface denotes the greatest coverage percentages and shortest average lengths among estimation approaches.
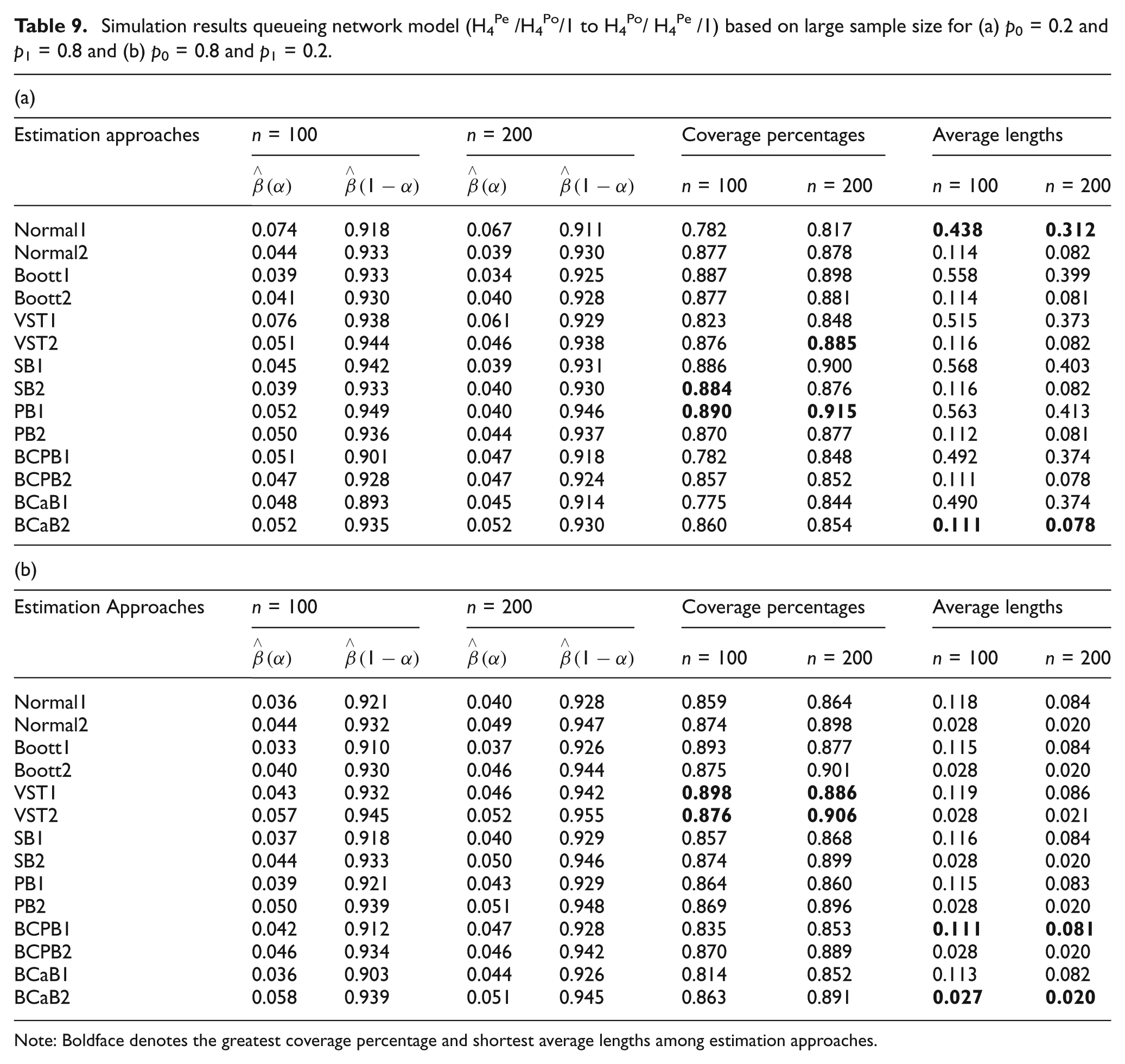
Simulation results queueing network model (H4Pe /H4Po/1 to H4Po/ H4Pe /1) based on large sample size for (a) p0 = 0.2 and p1 = 0.8 and (b) p0 = 0.8 and p1 = 0.2.
(a)
Estimation approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.074
0.918
0.067
0.911
0.782
0.817
0.438
0.312
Normal2
0.044
0.933
0.039
0.930
0.877
0.878
0.114
0.082
Boott1
0.039
0.933
0.034
0.925
0.887
0.898
0.558
0.399
Boott2
0.041
0.930
0.040
0.928
0.877
0.881
0.114
0.081
VST1
0.076
0.938
0.061
0.929
0.823
0.848
0.515
0.373
VST2
0.051
0.944
0.046
0.938
0.876
0.885
0.116
0.082
SB1
0.045
0.942
0.039
0.931
0.886
0.900
0.568
0.403
SB2
0.039
0.933
0.040
0.930
0.884
0.876
0.116
0.082
PB1
0.052
0.949
0.040
0.946
0.890
0.915
0.563
0.413
PB2
0.050
0.936
0.044
0.937
0.870
0.877
0.112
0.081
BCPB1
0.051
0.901
0.047
0.918
0.782
0.848
0.492
0.374
BCPB2
0.047
0.928
0.047
0.924
0.857
0.852
0.111
0.078
BCaB1
0.048
0.893
0.045
0.914
0.775
0.844
0.490
0.374
BCaB2
0.052
0.935
0.052
0.930
0.860
0.854
0.111
0.078
(b)
Estimation Approaches
n = 100
n = 200
Coverage percentages
Average lengths
n = 100
n = 200
n = 100
n = 200
Normal1
0.036
0.921
0.040
0.928
0.859
0.864
0.118
0.084
Normal2
0.044
0.932
0.049
0.947
0.874
0.898
0.028
0.020
Boott1
0.033
0.910
0.037
0.926
0.893
0.877
0.115
0.084
Boott2
0.040
0.930
0.046
0.944
0.875
0.901
0.028
0.020
VST1
0.043
0.932
0.046
0.942
0.898
0.886
0.119
0.086
VST2
0.057
0.945
0.052
0.955
0.876
0.906
0.028
0.021
SB1
0.037
0.918
0.040
0.929
0.857
0.868
0.116
0.084
SB2
0.044
0.933
0.050
0.946
0.874
0.899
0.028
0.020
PB1
0.039
0.921
0.043
0.929
0.864
0.860
0.115
0.083
PB2
0.050
0.939
0.051
0.948
0.869
0.896
0.028
0.020
BCPB1
0.042
0.912
0.047
0.928
0.835
0.853
0.111
0.081
BCPB2
0.046
0.934
0.046
0.942
0.870
0.889
0.028
0.020
BCaB1
0.036
0.903
0.044
0.926
0.814
0.852
0.113
0.082
BCaB2
0.058
0.939
0.051
0.945
0.863
0.891
0.027
0.020
Note: Boldface denotes the greatest coverage percentage and shortest average lengths among estimation approaches.
In Tables 2 and 3, the mean of N simulated , i = 1,2 for various n and three specified queueing network models (described in Table 1) are recorded. Tables 2 and 3 imply that the sample mean of , i = 1,2 converges to the true value of , i = 1,2 as the sample size n becomes large enough, under any specified queueing network models, as we expect. According to simulation analysis, we show that , i = 1,2 is a consistent estimator of the response times , i = 1,2 for queueing network models. All estimates of along with coverage percentages and average lengths of mean response time , i = 1,2 based on simulation analysis for different queueing network models with feedback for different interval estimation approaches are shown in Tables 4 to 6 for sample size n = 15, 25 and Tables 7–9 for sample size n = 100, 200.
According to the simulation results we observe that average lengths are decreasing but coverage percentages are increasing when sample size n increases. The coverage percentage approaches 90% when n increases.
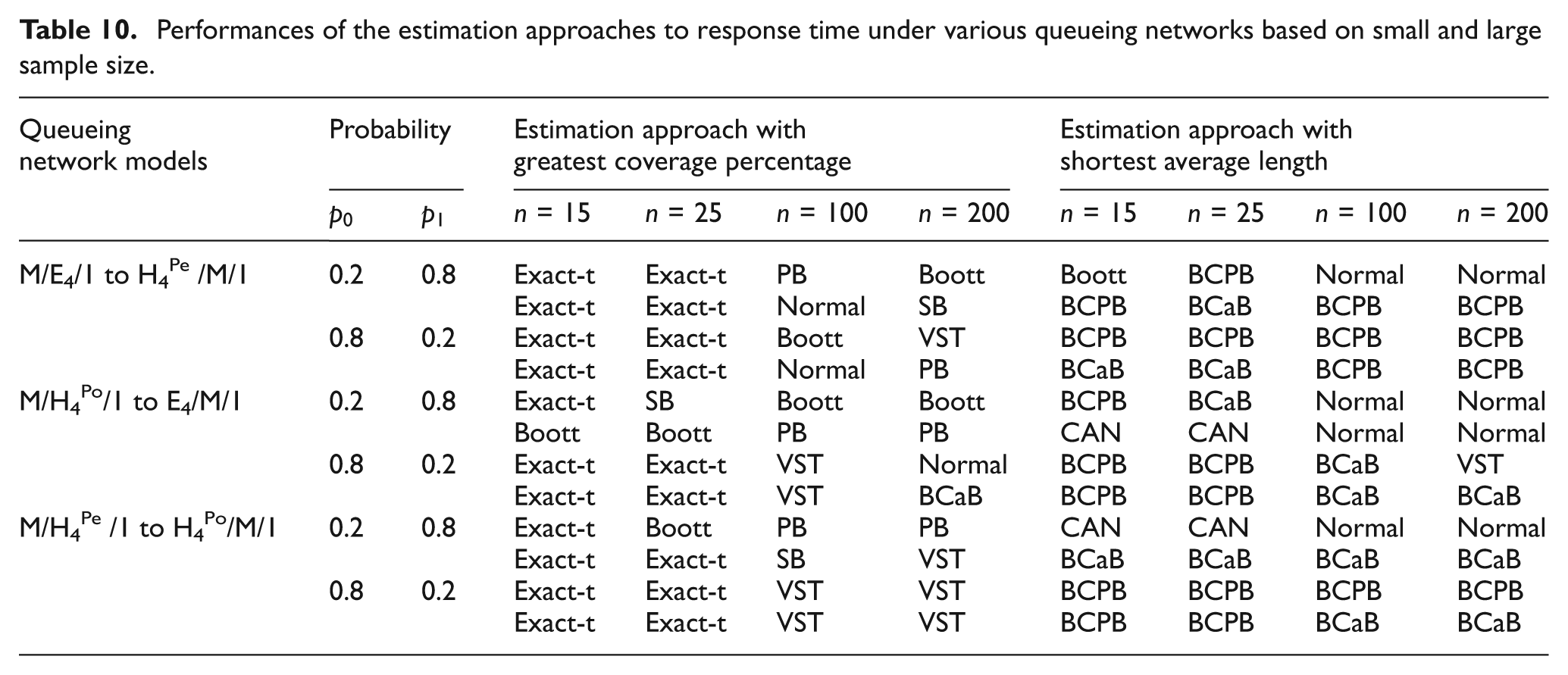
Further, Table 10 shows the comparative study of different estimation approaches. Table 10 is prepared using Tables 4–9 and it provides estimation approaches with greatest coverage percentage and shortest average length for sample size n (= 15, 25, 100, 200).
Performances of the estimation approaches to response time under various queueing networks based on small and large sample size.
Queueing network models
Probability
Estimation approach with greatest coverage percentage
Estimation approach with shortest average length
n = 15
n = 25
n = 100
n = 200
n = 15
n = 25
n = 100
n = 200
M/E4/1 to H4Pe /M/1
0.2
0.8
Exact-t
Exact-t
PB
Boott
Boott
BCPB
Normal
Normal
Exact-t
Exact-t
Normal
SB
BCPB
BCaB
BCPB
BCPB
0.8
0.2
Exact-t
Exact-t
Boott
VST
BCPB
BCPB
BCPB
BCPB
Exact-t
Exact-t
Normal
PB
BCaB
BCaB
BCPB
BCPB
M/H4Po/1 to E4/M/1
0.2
0.8
Exact-t
SB
Boott
Boott
BCPB
BCaB
Normal
Normal
Boott
Boott
PB
PB
CAN
CAN
Normal
Normal
0.8
0.2
Exact-t
Exact-t
VST
Normal
BCPB
BCPB
BCaB
VST
Exact-t
Exact-t
VST
BCaB
BCPB
BCPB
BCaB
BCaB
M/H4Pe /1 to H4Po/M/1
0.2
0.8
Exact-t
Boott
PB
PB
CAN
CAN
Normal
Normal
Exact-t
Exact-t
SB
VST
BCaB
BCaB
BCaB
BCaB
0.8
0.2
Exact-t
Exact-t
VST
VST
BCPB
BCPB
BCPB
BCPB
Exact-t
Exact-t
VST
VST
BCPB
BCPB
BCaB
BCaB
13. Conclusions
This paper provides the comparative study of different calibrated confidence intervals of mean response times and for a two-stage open queueing network with feedback. Using a recurrence relation approach, we obtain a sequence of response time. The mean of these response times is used as an estimate of the mean response time , i = 1,2. This estimator, , i = 1,2, is verified to be consistent by simulation analysis. Different estimation approaches CAN/Normal, Exact-t, SB, Boott, VST, PB, BCaB and BCPB are applied to produce calibrated confidence intervals for mean response times and . Coverage percentages and average lengths are adopted to understand, compare and assess performance of the resulted calibrated confidence intervals. Table 10 shows performances of the estimation approaches. These approaches are easily applied to practical queueing networks, such as all types of an open, closed and mixed queueing networks, as well as cyclic and retrial queueing models.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.
Author biographies
Vinayak K Gedam received his MSc degree in statistics from Rastrasant Tukdoji Maharaj, Nagpur University, Nagpur (India) and his PhD degree in statistics in 2000 from Rastrasant Tukdoji Maharaj, Nagpur University, Nagpur. He joined Sant Gadge Baba Amaravati University, Amaravati (India), as an assistant professor in statistics. Currently he is an associate professor with the Department of Statistics and Centre for Advanced Studies in Statistics, Savitribai Phule Pune University, Pune (India). His research interests include statistical inference (parametric and nonparametric), queueing theory and queueing network models and stochastic transportation problems.
Suresh B Pathare received his MSc degree in statistics (1998) and his MPhil degree in statistics (2004) from Department of Statistics and Centre for Advanced Studies in Statistics, University of Pune (India). Currently he is an assistant professor in statistics at the Indira College of Commerce and Science, Pune. Also he is pursuing his PhD degree from the Department of Statistics and Centre for Advanced Studies in Statistics, Savitribai Phule Pune University, Pune (India). His research interests include statistical inference (parametric and nonparametric), queueing theory and queueing network models.
References
1.
DisneyRL. Random flow in queueing networks: a review and a critique. Trans AIEE1975; 7: 268–288.
2.
JacksonJR. Networks of waiting lines. Oper Res1957; 5: 518–521.
3.
ThiruvaiyaruDBasavaIVBhatUN. Estimation for a class of simple queueing network. Queueing Syst1991; 9: 301–312.
4.
KleinrockL. Queueing systems, vol. II, computer applications. New York: John Wiley & Sons, 1976.
5.
EfronB. Bootstrap methods: another look at the jackknife. Ann Stat1979; 7: 1–26.
6.
EfronB. The jackknife, the bootstrap, and other resampling plans. CBMS-NSF regional conference series in applied mathematics, monograph 38. Philadelphia, PA: SIAM; 1982.
7.
EfronB. Better bootstrap confidence intervals. J Am Stat Assoc1987; 82: 171–200.
8.
GedamVKPathareSB. Calibrated confidence intervals for intensities of a two stage open queueing network. J Stat Appl Probab2014; 3: 33–44.
9.
GedamVKPathareSB. Calibrated confidence intervals for intensities of a two stage open queueing network with feedback. J Stat Math2013; 4: 151–161.
10.
GedamVKPathareSB. Comparison of different confidence intervals of intensities for an open queueing network with feedback. Am J Oper Res2013; 3: 307–327.
11.
PathareSBGedamVK. Some estimation approaches of intensities for a two stage open queueing network. Stat Optim Inform Comput2014; 2: 33–46.
12.
ChuYKKeJC. Confidence intervals of mean response time for an M/G/1 queueing system: bootstrap simulation. Appl Math Comput2006; 180: 255–263.
13.
ChuYKKeJC. Interval estimation of mean response time for a G/M/1 queueing system: empirical Laplace function approach. Math Meth Appl Sci2006; 30: 707–715.
14.
ChuYKKeJC. Mean response time for a G/G/1 queueing system: simulated computation. Appl Math Comput2007; 196: 772–779.
15.
RoussesGG. A course in mathematical statistics. 2nd ed.New York: Academic Press, 1997.
16.
HoggRVCraigAT. Introduction to mathematical statistics. Englewood Cliffs, NJ: Prentice-Hall; 1995.
17.
EfronBTibshiraniR. An introduction to the bootstrap. New York: Chapman and Hall, 1993.
18.
LohWY. Calibrating confidence coefficient. J Am Stat Assoc1987; 82: 155–162.
19.
BeranR. Prepivoting to reduce level error of confidence sets. Biometrika1987; 74: 457–468.
20.
HallP. On the bootstrap and confidence intervals. Ann Stat. 1986; 14: 1431–1452.
21.
HallPMartinMA. On bootstrap resampling and iteration. Biometrika1988; 75: 661–671.
22.
LohWY. Bootstrap calibration for confidence interval construction and selection. Stat sinica1991; 1: 477–491.