
Abstract
Considering existing speed guidance models and their test method without reflecting upon the connected vehicle (CV) characteristics, a speed guidance model during the green phase is proposed using the real-time information of signal phase and timing, the vehicle travelling state, and environmental characteristics surrounding intersection. Considering the weakness of data non-synchronization and trajectory heterogeneity of the existing simulators, one-engine simulation architecture is introduced to validate the speed guidance model in the CV environment. The results indicate that the distribution of time headway shows a significant difference between with speed guidance and without speed guidance in the CV environment, and speed guidance can improve the harmonization of the time headway without degrading the travel efficiency. Speed guidance is affected by the space environment surrounding the intersection and V2I communication properties. Compared with a complicated space environment, for example an urban environment, speed guidance in a free space environment, for example a rural environment, has a better improvement of mobility and exhaust emission. In addition, the improvement of mobility and exhaust emission appears to have an increase tendency with the increase of transmission power and penetration rate.
1. Introduction
An intersection is an influx and distribution node of traffic flow in urban networks, and is also the bottleneck node of road capacity, which has a vital impact on mobility, safety, and the environment of unban networks. With the emergence of Internet of things (IoT) technology, connected vehicle (CV) technologies, such as speed guidance, promise to improve the mobility and safety of traffic flow, and can also decrease fuel consumption and air pollutant emissions by reducing idling, the number of stops, and unnecessary acceleration and decelerations at intersection.1,2
Traditional speed guidance is used to direct vehicle travelling in the work zone and speed limit segment through variable message signs (VMSs).3–7 A two-stage speed guidance scheme was proposed to reduce traffic conflicts at work zones. The results showed an approximately 7% increase of total throughput at the downstream work zone boundary during the 6:00–7:00 a.m. periods. 3 Yang et al. 4 utilized speed guidance control to improve the efficiency and safety of expressways. The numerical simulation results showed that total traffic conflicts decreased 29.1 %, travel time of the monitoring link reduced 45.3%, and variance of travel time reduced 47.8 %. To quantify the relative contribution of the compliance level (CL) with a proactive optimal variable speed limit (VSL) control toward improving mobility and safety, several CL-to-VSL strategies were modeled to implement a proactive optimal VSL control strategy with CLs. The simulation evaluation showed that both VSL mobility and safety benefits were positively correlated with increasing CLs. Specifically, the travel time, throughput, and collision probability were improved in the CL ranges of 5–15%, 6–8%, and 50–60%, respectively. 5 A limitation of speed guidance through VMSs is a serious delay of guidance information release.
Speed guidance strategies are also introduced to improve the mobility, safety, and energy efficiency of intersections.8–10 The green wave speed guidance strategy (GWSGS) and eco-driving speed guidance strategy (EDSGS) were designed to provide drivers with speed advice through VMS and in-car displays. Simulation results indicated that the EDSGS showed more benefits than the GWSGS. Compared with vehicles without speed guidance, the fuel consumption and CO2 emissions can be reduced by 25% and 13% under the EDSGS and GWSGS, respectively. The eco-driving vehicle’s velocity trajectory was smoother than that of the green wave vehicle, and the average compliance rate of the EDSGS was higher than that of the GWSGS. 9 The existence of a dilemma zone was the main reason for accidents and violation of traffic laws near signal intersections. A dynamic speed guidance system was developed to improve the safety of intersections. 10
By sharing the information of signal phase and timing (SPaT) and vehicle states using CV technologies, speed guidance strategies of vehicles approaching intersections provide an effective solution to the mobility of urban intersections. Recently, few scholars have attempted to study the mobility improvement of intersections by introducing CV technologies.11–14 The impact of speed guidance of intersections on mobility, safety, and environmental factors in the CV environment was analyzed. The simulation results indicated that CV technology showed promising benefits for the improvement of environmental and safety issues, but somewhat contradict mobility, especially in the area of reducing inter-vehicular friction. 15 However, the majority of the proposed speed guidance strategies were validated by numerical simulation based on MATLAB/VISSIM software, which cannot realize real-time sharing of SPaT and vehicle states considering the properties of the CV environment.16–18
The primary objective of this paper is to propose a speed guidance model that is suitable for a single vehicle in the CV environment and a one-engine CV simulation architecture, which can realize the tight coordination simulation of traffic flow and communication networks. The proposed model is validated using the one-engine CV simulation architecture considering four variables reflecting the properties of the CV environment, namely the fading factor, path loss factor, transmission power, and penetration rate.
2. One-engine connected vehicle simulation architecture
At present, methods of validating CV technologies include simulation and field experiments. Considering the disadvantages of field experiments, such as cumbersome preparation and high cost, the majority of related studies employ the simulation method to validate CV technologies, and propose various simulators for CV technology testing. The main limitations of these works is that their tools integrate different simulators rather than simply using a one-simulation engine, which result in the weakness of data non-synchronization and trajectory heterogeneity of different simulators.
To improve the simulation efficiency of CV simulators, in this paper a new integrated simulation architecture is proposed based on the commercial software EstiNet. EstiNet is a tool for studying cloud computing and next-generation communication networks, which provides a highly integrated and professional graphical user interface (GUI) and supports common wired and wireless network devices as well as IEEE 802.11 (p)-equipped vehicles. Figure 1 shows the logical structure of one-engine simulation architecture for validating CV technologies.
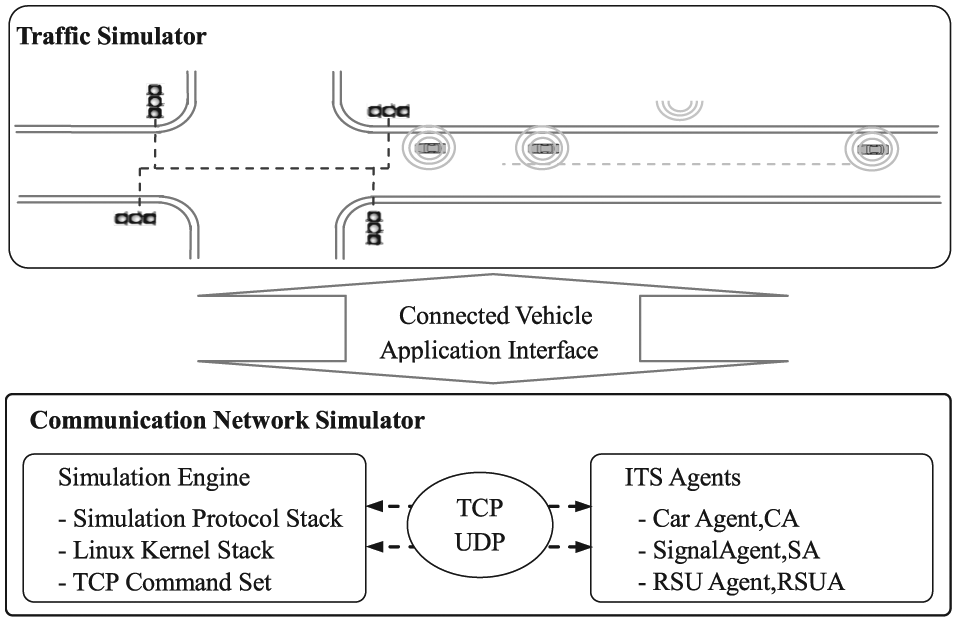
Logical structure of one-engine simulation architecture.
Compared to existing simulators, the main advantages of the one-engine simulation architecture include the following.
Establishment of the CV environment and simulation of CV technologies is completed in one-engine simulation architecture, which can be used to accurately analyze the interaction between vehicles and transmitted traffic information in a realistic CV environment.
Various travel behavior models are designed by C/C++ programming in the CV environment using its application programming interface (API). Three agents, named CarAgent, SignalAgent, and RSUAgent, can be used to design the car-following model, lane-changing model, cooperative guidance model, etc.
The one-engine simulation architecture has the useful capability of simulating communication networks. V2X communication protocols, such as 802.11b and WAVE, can be used to model signal attenuation in urban and rural environments to analyze the effect of various obstacles on data transmission.
3. Speed guidance model
The speed guidance of vehicles approaching intersections during the green phase is only discussed in this paper. When entering the intersection, CVs will be informed of green time available by real-time receiving SPaT from the intersection roadside unit (RSU). Using the SPaT information, the speed guidance model will judge whether or not CVs can smoothly pass through the intersection in accordance with initial speed v0. If CVs cannot arrive at the intersection during the green phase, the speed guidance model will calculate a suggested speed vsug at a distance d0 from the intersection according to CVs’ position, speed, the speed limit, and the received SPaT. Finally, drivers will consider the leading vehicle and decide whether or not they pass through the intersection during the current green phase according to the suggested speed vsug.
Figure 2 illustrates the corresponding logical relationship between v0 and vsug. It is consistent with common sense that a lower suggested speed vsug will be provided in higher initial speed v0 at a distance d0.
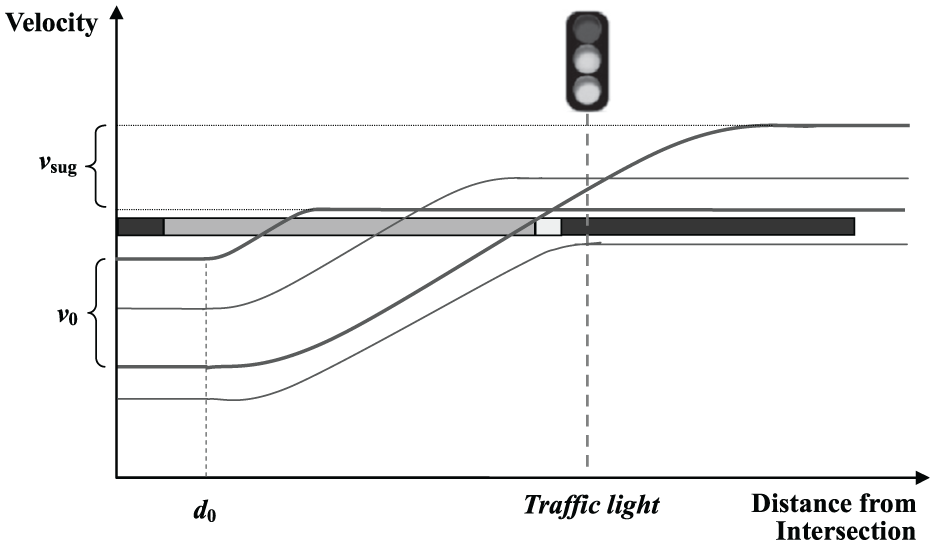
Corresponding logical relationship of initial travel speed and suggested speed.
The speed guidance model is based on a vehicle entering the intersection during the green time. When a vehicle enters an intersection, it cannot pass through the intersection at current speed v0. The minimum speed v’ passing through the intersection during green time tg at location d0 is as follows:

where the time t’ that the vehicle accelerates from v0 to v’ at comfortable acceleration rate a is as follows:

where t’ can be understood as a waste of the current green time, so the effective green time available Tg’ is as follows:

Thus, the suggested speed vsug passing through the intersection without a stop should satisfy the following:

Considering the speed limit, the proposed vsug is determined by the following:

where a is a comfortable acceleration rate in m/s2. A maximum acceleration of 2.5 m/s2 with a smooth jerk profile was recommended by a previous study.
The flow diagram of the speed guidance model in one-engine simulation architecture is shown in Figure 3.
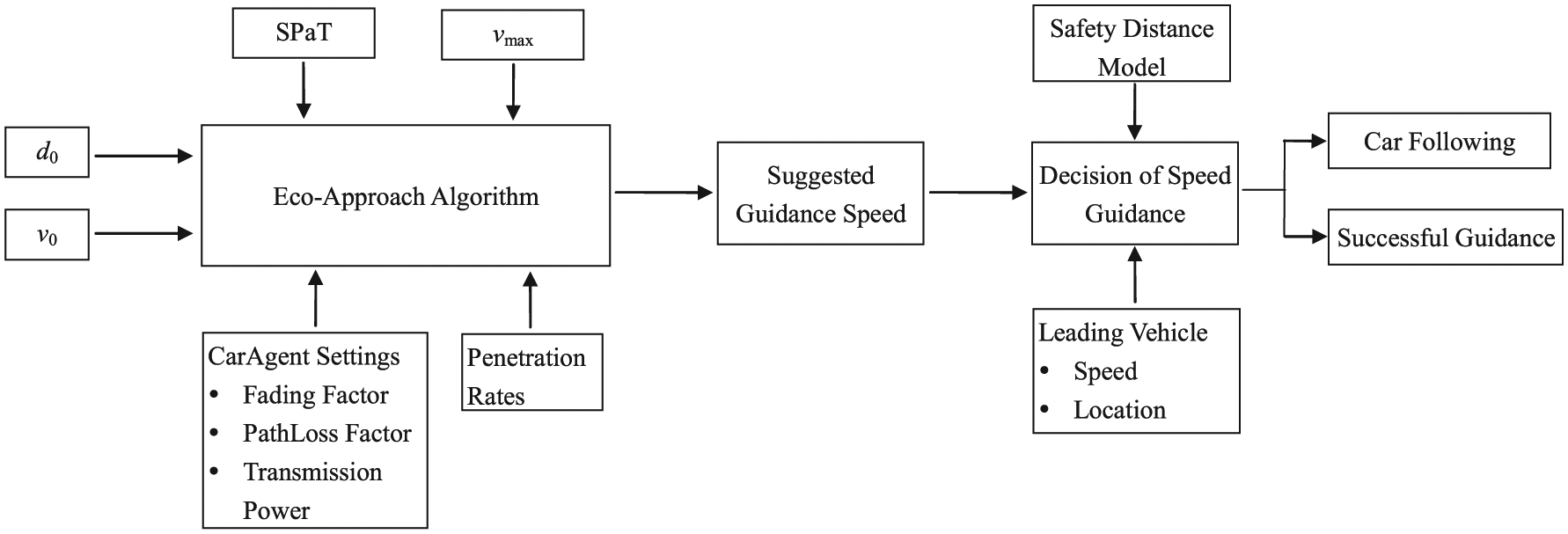
Flow diagram of the speed guidance algorithm.
4 Validation and discussion
To evaluate the performance of the speed guidance model, a 3.7 km segment of CHEGONGZHUANG, an urban arterial road in Beijing (see Figure 4), is selected to establish the speed guidance scenario using the proposed simulation architecture. The arterial road includes two signalized intersections, which are selected to evaluate the speed guidance model.
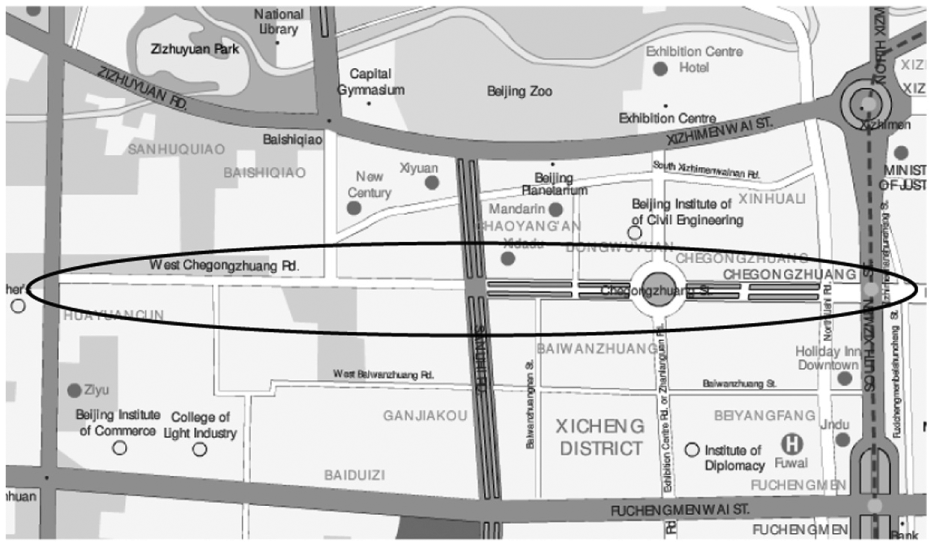
Study area.
To study the impact of wireless communication and the space environment surrounding the intersection on speed guidance in the CV environment, two variables characterizing communication properties, transmission power and penetration rate, and two variables characterizing environment properties, fading factor and path loss factor, are introduced.
Table 1 shows the description of the considered variables in the simulation.
Parameters used in the simulation.
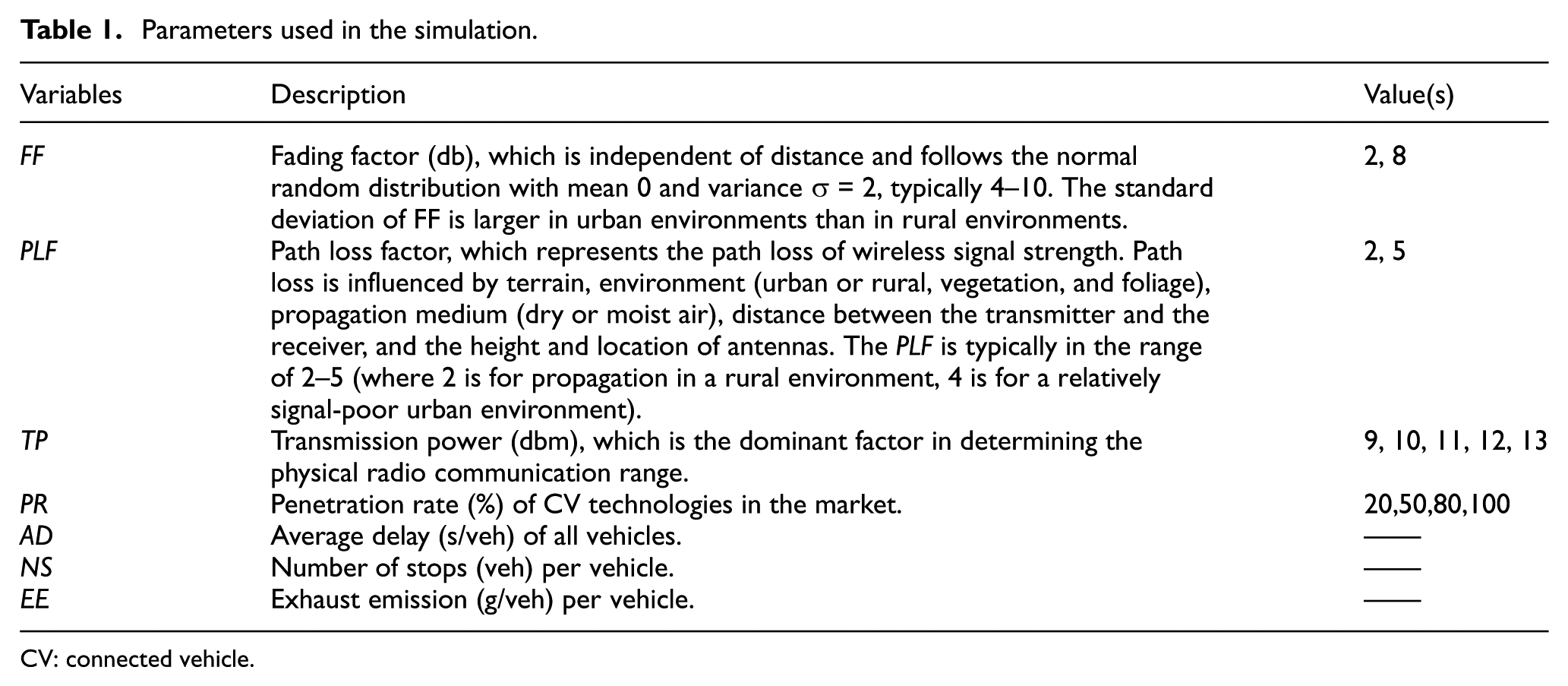
CV: connected vehicle.
The entire experiment includes 80 scenarios (two FF times two PLF times five TP times four PR). Each scenario is tested for a simulation time of 55 minutes after 5 minutes of initialization based on random seeds. Travel variables of each vehicle through the intersection, such as position and speed, are collected by the RSU. Compared with the non-CV speed guidance environment, the distribution of time headway and three mobility indexes, namely AD, NS, and EE, are analyzed to validate the speed guidance model in the CV environment.
4.1 Distribution of time headway
The values of FF, PLF, TP, and PR in the simulation are set to 2, 2, 13, and 100%, respectively. The time headway of vehicles approaching the intersection in the CV environment is analyzed; the cumulative density function (CDF) of time headways is shown in Figure 5. As can be seen in Figure 5, the time headway with speed guidance shows a linear distribution tendency compared with that without speed guidance.
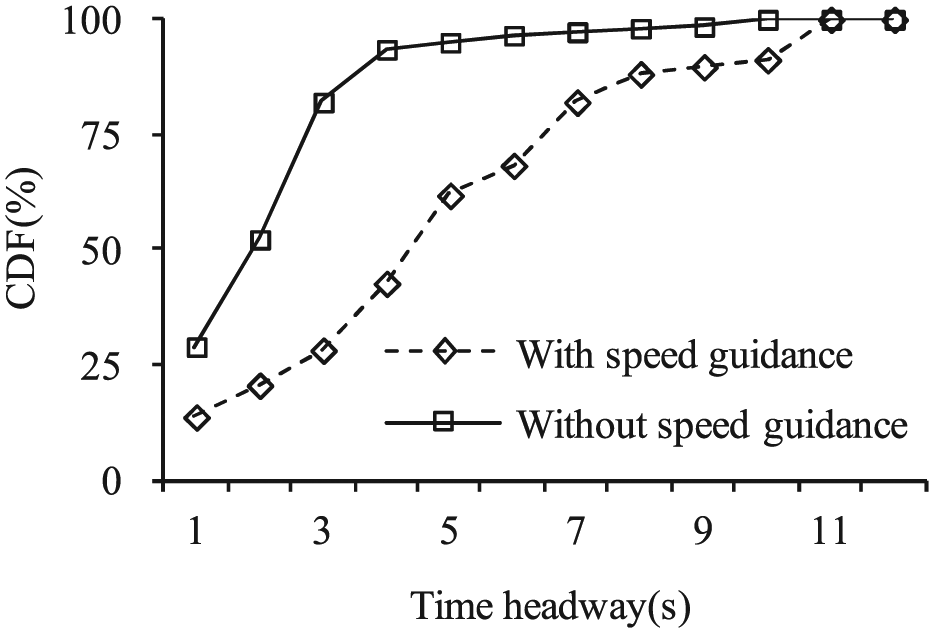
Cumulative density function (CDF) of time headways.
Figure 6 gives the comparison of travel time for all vehicles across the intersection with and without speed guidance. Travel time with speed guidance is basically equivalent to that without speed guidance for the same SPaT plan and simulation parameters. The result indicates that the linear distribution tendency of time headway resulted from speed guidance would not reduce the travel efficiency of the intersection. A possible contributing factor to this result could be that a well-distributed fleet of vehicles pass through intersection according to the speed guidance strategy, while vehicles without speed guidance will arrive at the intersection at random and form a queue.
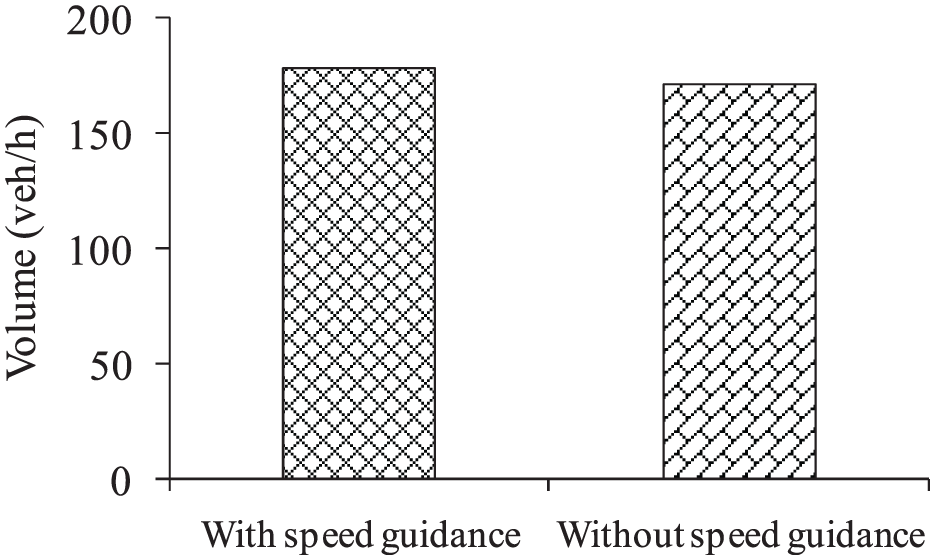
Comparison of intersection volumes.
An independent sample t-test is used to analyze the difference of time headway between with and without speed guidance, and the result is shown in Table 2. As can be seen in Table 2, the difference of time headway is significant.
Independent sample t-test.

As per the above analysis, the results indicate that the speed guidance strategy can improve the harmonization of time headway without degrading the travel efficiency, which increases the safety and smooth travel of vehicles across the intersection.
4.2 Analyses of evaluation indexes
Selecting AD, NS, EE as evaluation indexes, the impact of speed guidance on mobility and the environment is analyzed. AD is defined as the mean of difference in travel time of all vehicles passing through the intersection and their travel time in free flow. The travel time for each vehicle is the elapsed time (in seconds) spent driving from 15 m upstream (A point) to 15 m downstream (B point) of the intersection. AD can be expressed as follows:

where
When calculating EE, the model of pollution factors in the literature 19 is adopted, as shown in Table 3.
Model of pollution factors.

Using EIj and Ej, EE can be expressed as follows:
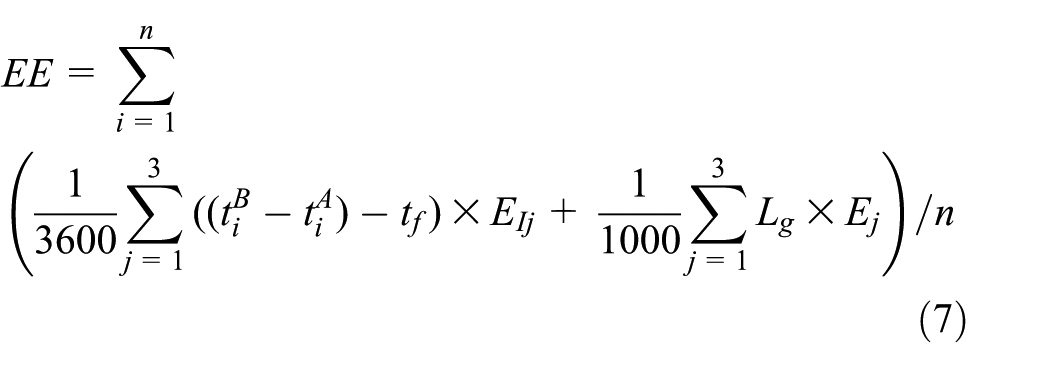
where EE is the pollutant emission per vehicle, g; Lg is the distance between A point and B point, m.
In order to analyze the impact of the space environment on the effect of speed guidance, an intersection is set to the free space environment (FF = 2, PLF = 2), for example a rural environment, and the other intersection is set to a complicated space environment (FF = 8, PLF = 5), for example an urban environment. Table 4 shows the improvement of AD, NS, and EE in different transmission powers.
Improvement of AD, NS, and EE.
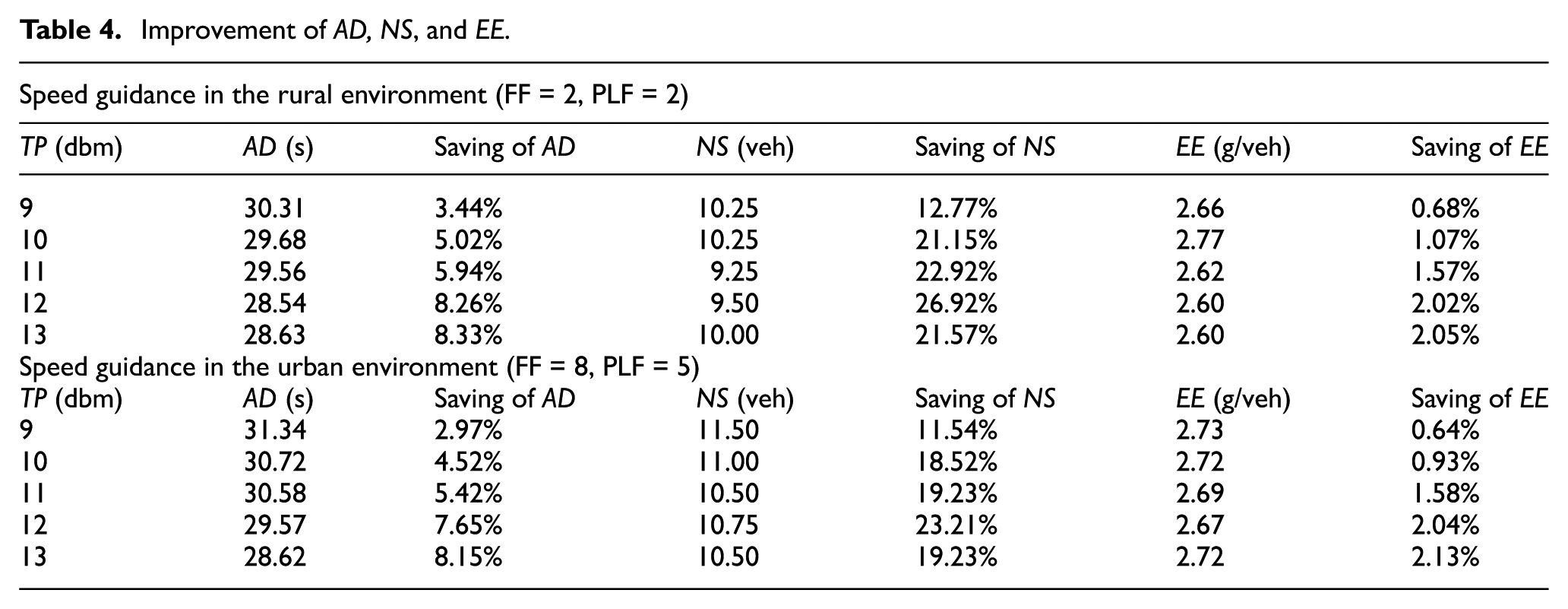
As Table 4 illustrates, the speed guidance strategy in the rural environment has a better improvement effect compared with that in the urban environment. The result indicates that the space environment surrounding the intersection has an influence on speed guidance. In a complicated urban environment, high buildings around the intersection have an effect on the SPaT information transmission, and cause issues of information delay and data packet loss to degrade the effect of the speed guidance strategy. In addition, TP has a positive effect on transmission reliability and distance, and the improvement has an increase tendency with the increase of TP. When the transmission distance exceeds a certain value, the improvement tends to slow, as shown in Figure 7. The result indicates that speed guidance at a relatively large distance from the intersection will affect a vehicle’s normal travel, which results in a negative effect on the effect of speed guidance. Therefore, how to select an appropriate distance for speed guidance is a further study issue.
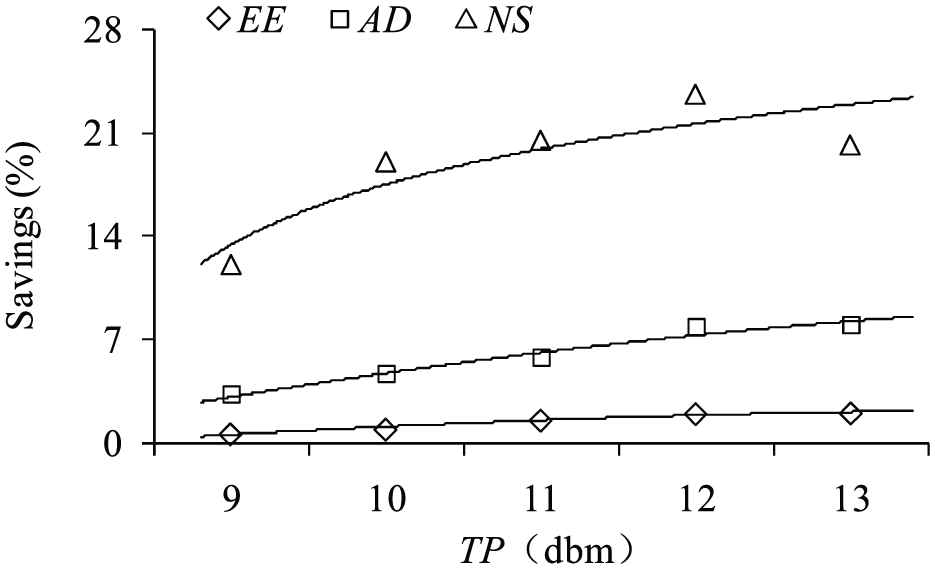
Improvement of AD, NS, and EE of different transmitted powers.
Figure 8 shows the effect of various penetration rates on the improvement of AD, NS, and EE. The improvement of mobility and environment appears to have an increase tendency with the increase of PR. The findings are also supported by previous studies showing that better benefits result from higher penetration rates. 20
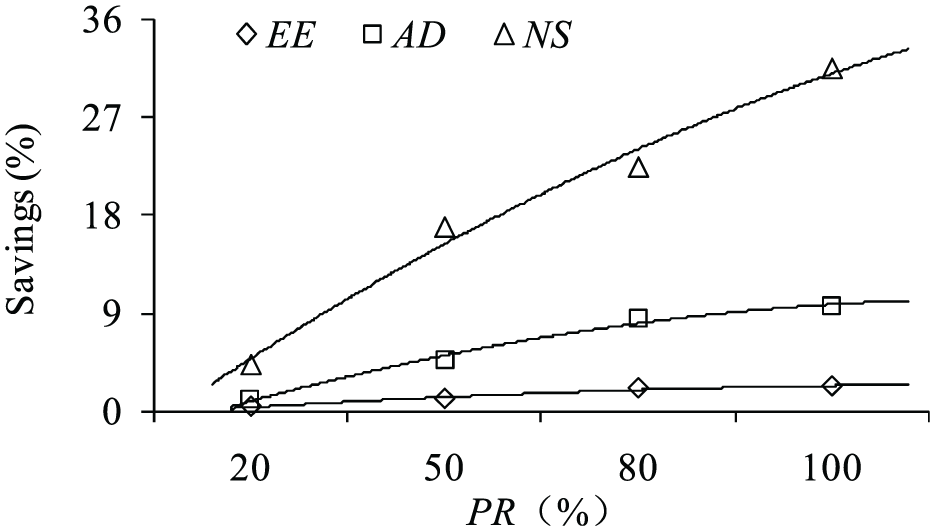
Improvement of AD, NS, and EE of different penetration rates.
5. Conclusion
A speed guidance model suitable for the green phase in the CV environment is proposed, and is validated using the proposed one-engine CV architecture. The results indicate that the speed guidance strategy will affect the distribution of time headway in the CV environment, which shows a uniform distribution tendency. The effect of speed guidance is affected by the space environment surrounding the intersection and V2I communication properties. Compared with a complicated space environment, for example an urban environment, speed guidance in a free space environment, for example a rural environment, has a better improvement of mobility and exhaust emission. In addition, the improvement of mobility and exhaust emission appears to have an increase tendency with the increase of transmission power and penetration rate.
This paper only considers speed guidance during the green phase. The next step is to study a speed guidance model that is suitable for the intersection group considering the time headway distribution approaching the intersection.
Footnotes
Funding
This work was supported by the National Natural Science Foundation of China (grant number 61473028), the Beijing Municipal Natural Science Foundation (grant number 8162031), and the National High Technology Research and Development Program of China (“863” Program)(grant number 2015AA124103).