
Abstract
This part presents a dynamic model for predicting the impact compressive responses of warp-knitted spacer fabrics under various loading conditions using quasi-static compressive stress–strain data. The model was established based on a nonlinear mass-spring-damper system by considering spacer yarns as nonlinear springs with damping effect and representation of their stiffness by the constitutive model developed in Part I. Based on the dynamic model, the impact compressive responses of a typical warp-knitted spacer fabric was parametrically studied in terms of damping ratio, initial velocity, striker mass and contact area. The study indicates that damping can reduce the peak acceleration and peak displacement regardless of loading conditions, and the increase of the initial velocity can enhance the damping effect. Increasing initial velocity or striker mass while keeping the counterpart constant can increase the peak acceleration and peak displacement. However, at a constant kinetic energy, either increasing striker mass or decreasing initial velocity can reduce the peak acceleration, but the peak displacement keeps constant. The study also shows that an optimal size of the spacer fabric exists for achieving minimal peak acceleration under impact at a certain kinetic energy. Experimental validation by drop-weight impact tests demonstrates that the predictions of the dynamic model are in satisfactory agreement with the experimental results. Using the quasi-static compressive data from a simple test, this dynamic model can numerically simulate the full time-response of warp-knitted spacer fabrics under various impact conditions.
People are frequently suffering unexpected mechanical shock impulses in working, sports and daily life. Mechanical shocks include several types of force actions on the human body with similar harmful effects. Shock forces are normally produced by impacts and blows from rapid changes in body velocity or from moving objects. 1 Injuries are usually to lungs, intestines, heart, head, neck or brain with tissue destruction, or to bone with fracture. Differences in injury patterns arise from differences in rates of loading, peak impact force, duration and localization of forces. Prevention effort aiming at reducing those injuries through the use of personal protective equipment (PPE) to mitigate the peak impact force has already been made. Most commercial PPE for impact protection, also called impact protectors, is designed for sports uses to reduce the risk of injury.2,3 Impact protectors available on the market are usually made by integrating a piece of rigid plastic for force shunting and a piece of soft polymeric foam for energy absorption. 4 Impact protectors are designed to protect people from injury, but their shock-absorbing ability often stands in contradiction to their wearing comfort and freedom of movement. 5 To overcome this drawback, warp-knitted spacer fabrics have recently been proposed to be used as cushioning materials in developing impact protectors for human body protection, due to their designable compressive resistance, excellent air and moisture permeability, and light-weight structure.6–10
Since the human body could be exposed to various loading conditions, such as different kinetic energy levels, different impact loading rates, different contact areas and different shapes of moving objects, the impact compressive responses of warp-knitted spacer fabrics under these different conditions should be well understood for further product development. However, study on impact compressive behavior of warp-knitted spacer fabrics is still lacking. Only some experimental work can be found in the literature.8–10 In our previous study, a drop-weight impact tester equipped with a circular planar striker and anvil was used to test a series of warp-knitted spacer fabrics with a given kinetic energy of 12.74 J at an impact velocity of 1.98 m/s. 8 The flatwise impact compressive responses of the spacer fabrics under this particular impact energy and velocity were obtained. The impact compressive responses of the spacer fabrics in hemispherical form were also studied based on the test results according to European Standard BS EN 1621-1:1998 with kinetic energies 5–50 J.9,10 The study has showed that warp-knitted spacer fabrics give different responses under impact with different loading rates and boundary conditions. It is necessary to point out that to fully understand the impact compressive responses of warp-knitted spacer fabrics for the development of impact protectors with required protective performance, a large amount of experimental work should be done. However, that will result in high time consumption and waste of material. Therefore, there is a need to establish a theoretical approach to get the full time-response of warp-knitted spacer fabrics under various impact conditions by only using a small quantity of quasi-static compressive tests.
A constitutive model consisting of seven parameters describing the compressive stress–strain relationships of warp-knitted spacer fabrics has been established in Part I of this paper. 11 The experimental validation has proved that the constitutive model is able to provide quasi-static compressive stress–strain data with high accuracy. The objective of this part is to develop a dynamic model for predicting the impact compressive responses of warp-knitted spacer fabrics under various loading conditions using the quasi-static compressive stress–strain data. The dynamic model is firstly established based on a nonlinear mass-spring-damper system by considering spacer yarns as nonlinear springs with damping effect and representation of their stiffness by the constitutive model developed in Part I. A parametric study is then conducted to analyze the effects of damping ratio, initial velocity, striker mass and contact area on the impact responses of a typical warp-knitted spacer fabric. An experimental validation is finally carried out using the typical spacer fabric selected.
Dynamic model
Knitting of warp-knitted spacer fabrics is controlled by periodic lapping movements of yarns into needles, so that every spacer fabric is composed of periodic unit cells. The spacer fabric S1 studied in Part I is used here as an example to illustrate the modeling strategy, which is shown in Figure 1.
Modeling strategy with integration of equivalent nonlinear unit spring.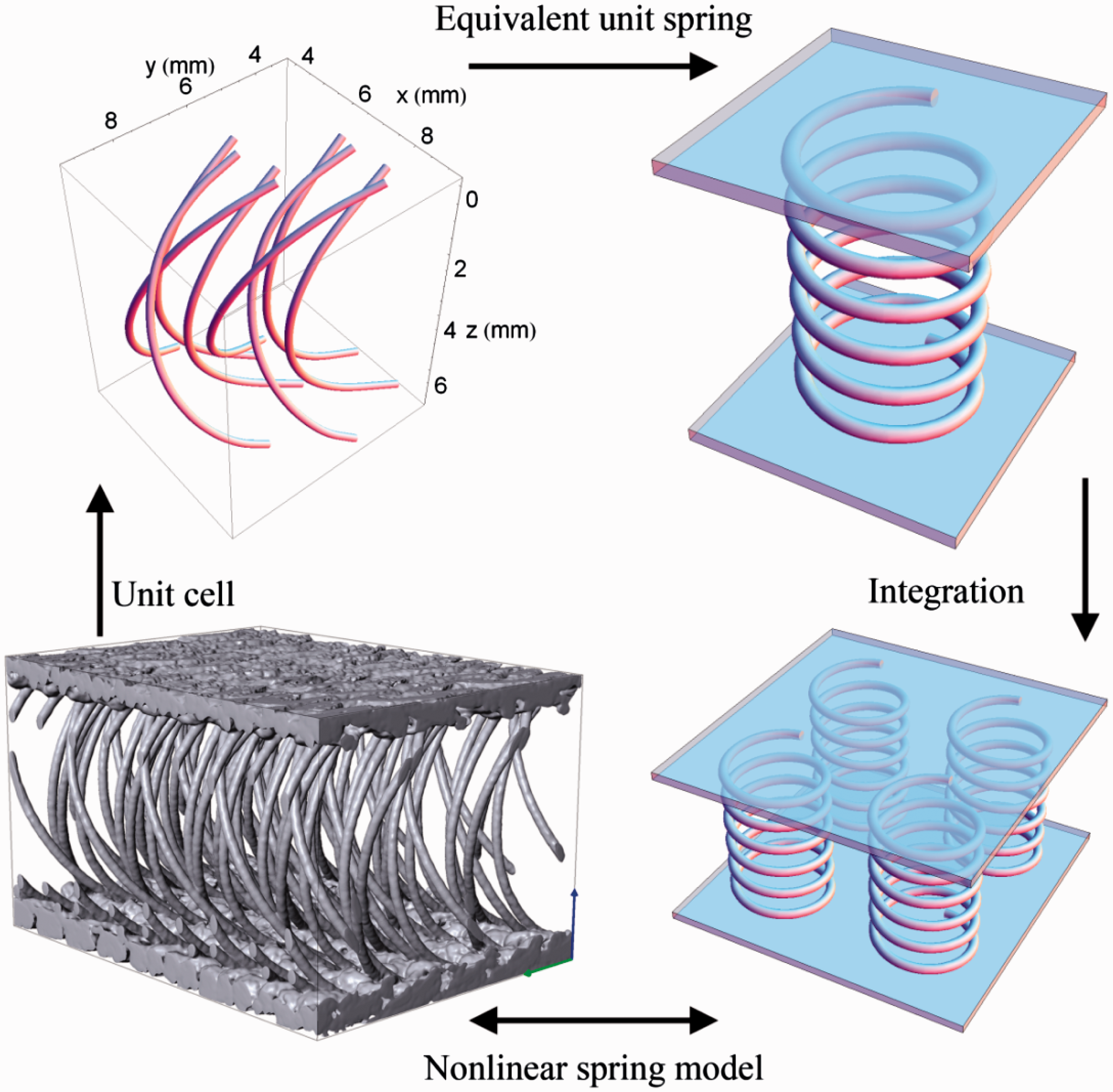
The unit cell of the spacer fabric includes eight monofilaments. The reaction force of the spacer fabric on a specific area A0 under compression Fa is the product of the number of unit cells in this area N and the reaction force of a unit cell Fs. This relationship can be expressed as Equation (1):

The overall nonlinear mechanical feature of the spacer fabric under compression can be completely represented by its unit cell. To model the spacer fabric in dynamics, the unit cell can be replaced by an elastic spring with nonlinear stiffness ks having the same force–displacement feature of the unit cell. The mechanical feature of the unit cell is given by Equation (2):

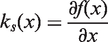
The spring stiffness varies with displacement due to the nonlinear function. By assembling N such nonlinear springs in parallel, the overall stiffness of the spacer fabric on an area A0 is obtained, which is given by Equation (4):

Meanwhile, the mechanical behavior of the whole fabric can also be modeled in the same way by assembling N paralleled nonlinear spring systems, which is given by Equation (5):

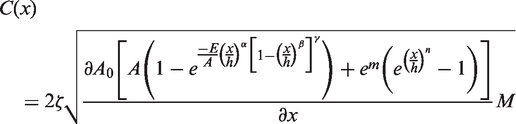
By introducing the constitutive model developed in Part I, F(x) can be expressed as Equation (6):

The dynamic behavior of the fabric under mass-drop can be described by a single degree of freedom (SDOF) system as depicted in Figure 2. The spacer fabric is not purely elastic under compression, viscous damping should be considered in the model by adding a damper to each nonlinear spring. According to Newton’s law, the differential equation of motion for the mass-spring-damper system can be expressed as Equation (7):
Mass-spring-damper model of spacer fabric under drop-weight impact.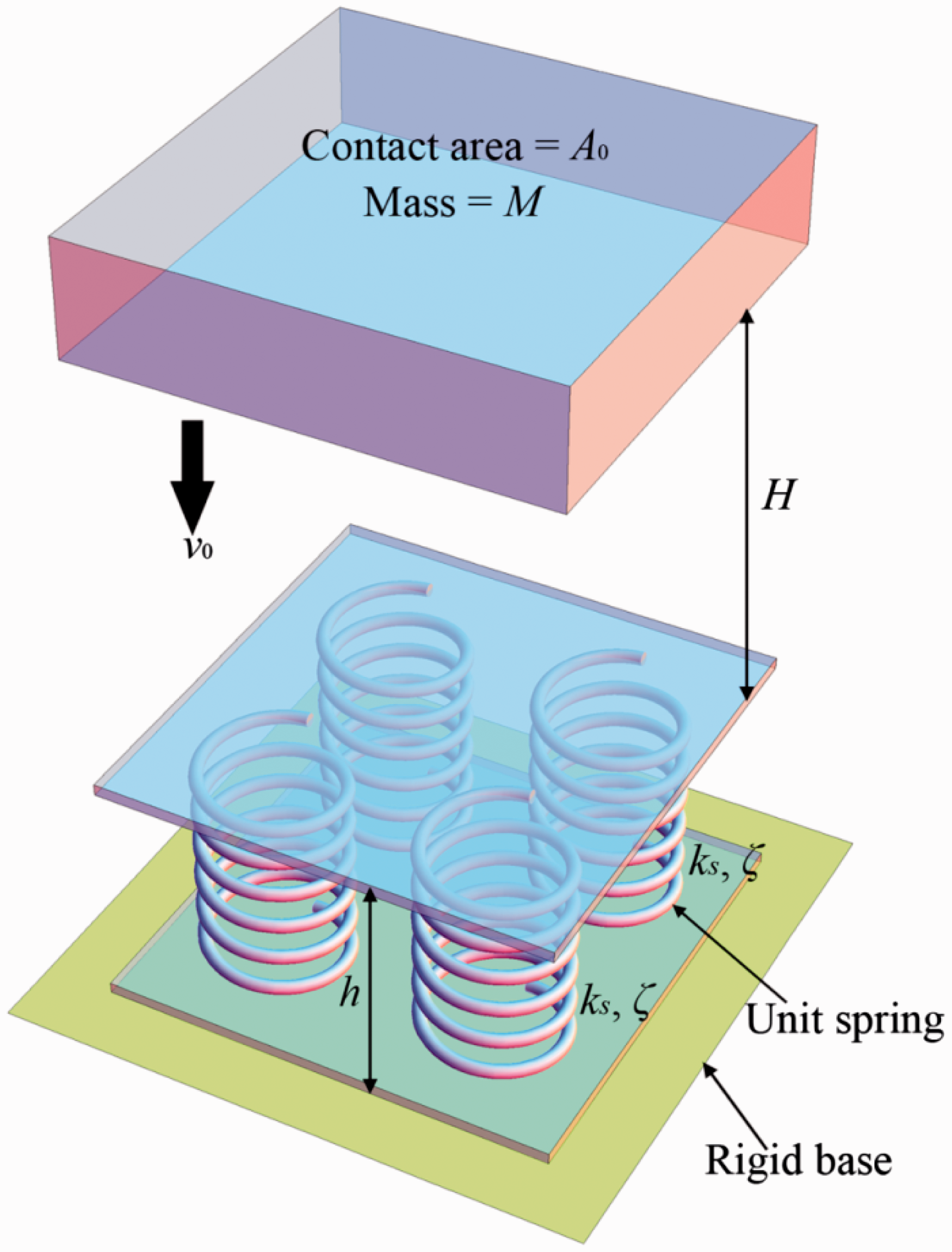



The gravity in the drop-impact force is always neglected because it is much less than peak acceleration in protective applications.12,13 Hence, the substitution of Equations (9) and (10) into Equation (7) with neglect of Mg yields the final form of the governing equation of the mass-spring-damper system, as expressed by Equation (11):
The initial displacement and velocity conditions of the system, as shown in Figure 2, are given by Equation (12):

Parametric study
The quasi-static compressive stress–strain data of a typical warp-knitted spacer fabric S1 with a thickness of 7.52 mm obtained from the flatwise compressive tests are used to conduct a parametric study for demonstrating the effectiveness of the dynamic model in predicting the impact responses of the fabric under various loading conditions. The details and quasi-static compressive test results of the fabric have been provided in Part I. Figure 3 shows a comparison of its compressive curves obtained from the experiment and fitting. It can be seen that the two curves are almost coincident, showing the effectiveness of the constitutive model in capturing the three phases of deformation, that is, linear elasticity, plateau and densification. Therefore, the use of the constitutive model in the dynamic model, as defined by Equation (11), can well represent the real deformation behavior of the fabric. For facilitating the parametric study here, the parameters of the constitutive model from fitting, which were presented in Part I, are relisted in Table 1.
Experimental and fitting compressive stress–strain curves of typical warp-knitted spacer fabric S1. The parameters of the constitutive model for warp-knitted spacer fabric S1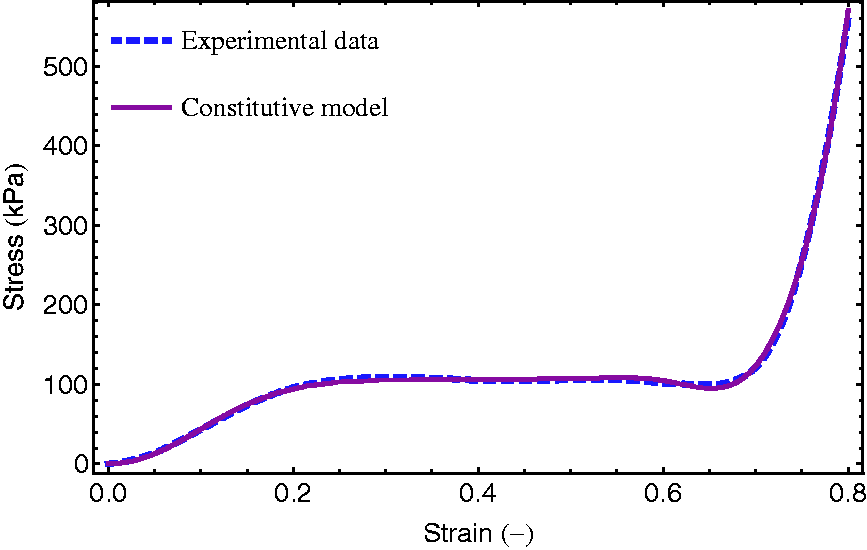

Effect of damping ratio
The spacer fabric is not perfectly elastic because its mechanical property is determined by the nature of the polyester fibers. The time-dependent viscous polyester fibers lead to damping in the spacer fabric during impact compressive deformation. Viscoelastic damping of the fabric is able to dissipate additional kinetic energy under impact. To measure the viscous damping coefficient of the polyester monofilament, the dynamic mechanical analysis (DMA) tests were carried out on a Perkin–Elmer diamond dynamic mechanical analyzer operated in the tensile mode under the temperature ranging from −25 to 250℃. The heating rate was 10℃ min−1, the frequencies were 1, 5 and 10 Hz and the oscillation amplitude was 10 µm. The gauge length between the clamps was 10 mm. The loss tangent (tanδ) of the polyester monofilament at different excitation frequencies are shown in Figure 4. It can be found that the loss tangent varies with frequency and temperature, ranging from 0.02 to 0.2. As the loss tangent is twice that of the damping ratio, the damping ratio of the polyester monofilament ranges from 0.01 to 0.1.
Loss tangent of 0.2 mm diameter polyester monofilament.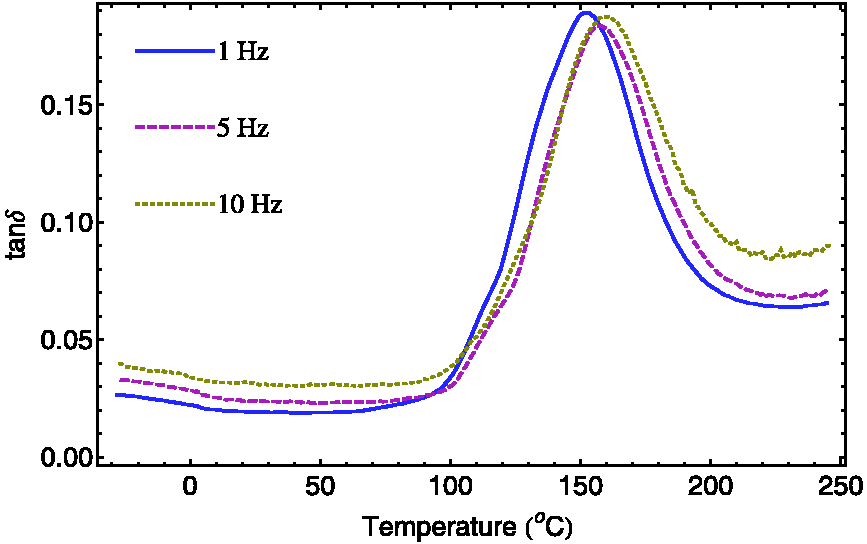
Four damping ratios, that is, ζ = 0, 0.02, 0.04 and 0.06, are used to investigate the damping effect on the impact response of the spacer fabric. The striker mass, drop height and contact area are assumed to be M = 6.5 kg, H = 0.2 m (initial velocity v0 = 1.98 m/s) and A0 = 165.13 cm2, respectively. By inputting these parameters together with those listed in Table 1 into Equation (11), the differential equation can be solved numerically. The resultant acceleration and displacement of the striker against time are plotted in Figure 5. When the damping ratio equals zero, the acceleration and displacement curves are exactly symmetrical, because the perfectly elastic nature of the nonlinear springs is adopted in this case and no energy was dissipated during the impact process. All the kinetic energy is transformed into potential energy at the rebound point at about 4.27 ms. At this instant, the velocity of the striker is zero, and the acceleration and displacement reach their peak points. Unlike the undamped case, the acceleration and displacement curves in the damped cases are not symmetrical because a part of kinetic energy is damped due to the viscoelasticity. The higher the damping ratio, the lower the peak acceleration and displacement observed. The increase of damping ratio also causes an increase of the time for the impact process.
Effect of damping ratio on the impact response.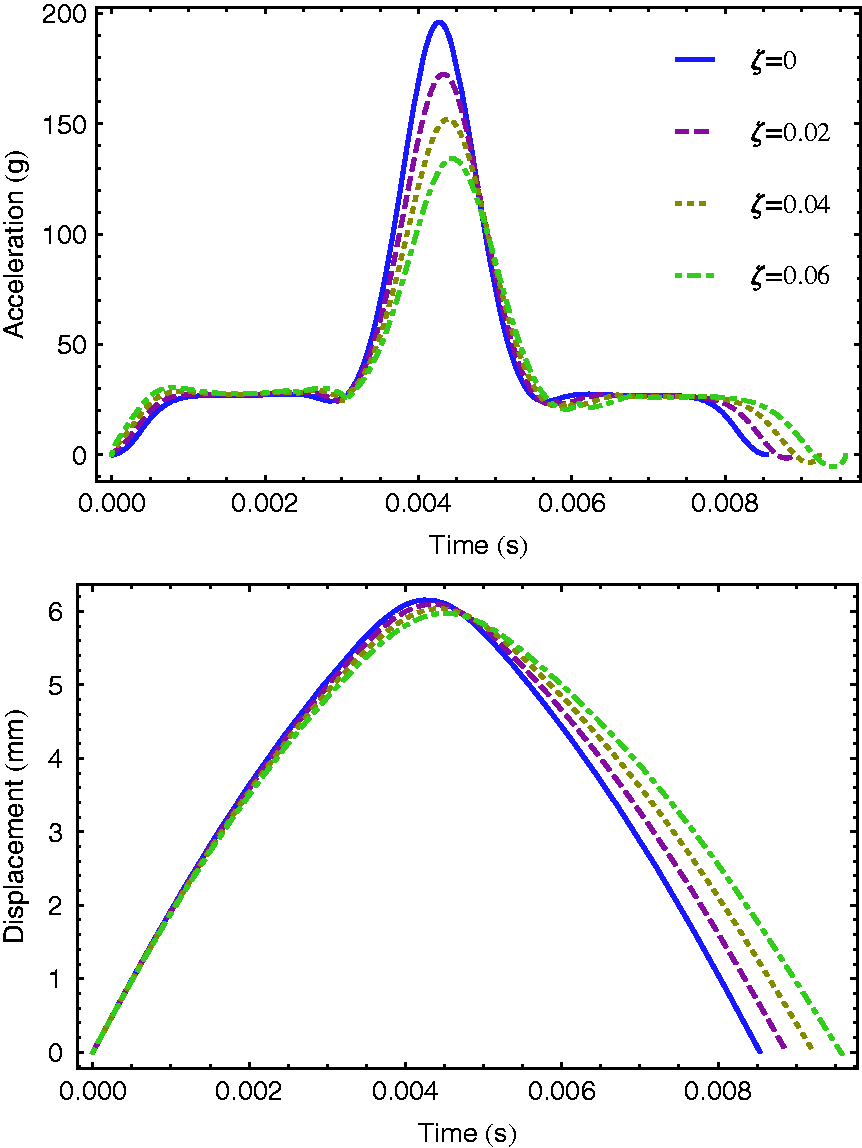
A higher damping ratio leading to a lower peak acceleration can be explained by the fact that less kinetic energy is needed to be stored by compressing the nonlinear spring in a heavily damped system. The fabric is compressed to a lower displacement giving a lower reaction force, and thus a lower peak acceleration is obtained. This implies that a warp-knitted spacer fabric knitted with a monofilament of higher damping ratio possesses better cushioning performance under impact.
Effect of initial velocity
To investigate the effect of initial velocity on the impact response of the spacer fabric, three initial velocities are used, that is, v0 = 1.4, 1.98 and 2.42 m/s, corresponding to the three heights H = 0.1, 0.2 and 0.3 m, while the striker mass is kept constant M = 6.5 kg. The contact area is selected as A0 = 165.13 cm2. In addition, two damping ratios, ζ = 0 and 0.02, are used to include the combined damping effect.
Figure 6 shows the curves of acceleration and displacement against time for different initial velocities and damping ratios. It appears that impacts with different initial velocities can end at different deformation phases, depending on the initial kinetic energy of the falling striker. The impacts with initial velocities 1.98 and 2.42 m/s end at densification phases, whereas that of 1.4 m/s ends at a plateau phase. However, the plateau stresses under the three impacts are equivalent regardless of the initial velocities. The differences in peak acceleration and impact duration can be significant for different initial velocities. It can also be seen that the effect of damping on the peak acceleration at a higher initial velocity is more significant than that at a lower initial velocity. This is because damping is sensitive to strain rate. The initial velocity affects the damping behavior. Therefore, the initial velocity is a key factor affecting the impact response when the striker mass is kept constant.
Effect of initial velocity on the impact response.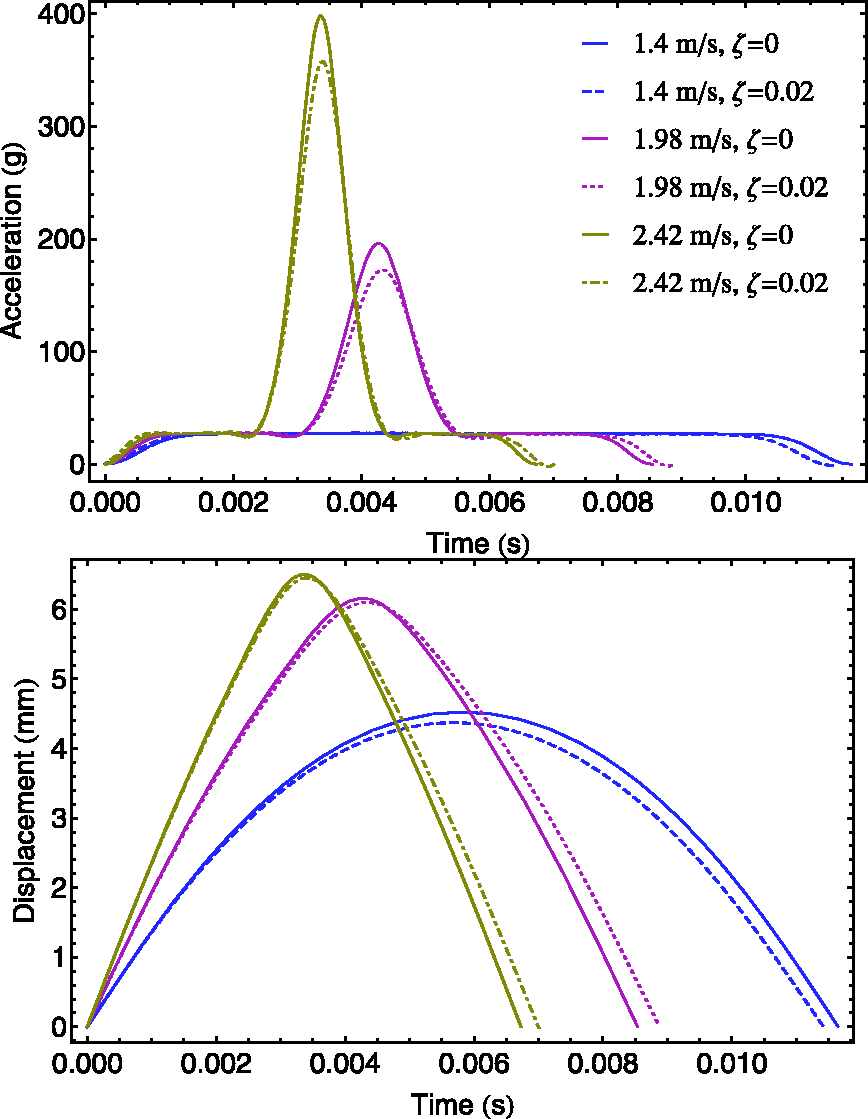
Effect of striker mass
The effect of striker mass on the compressive response of the spacer fabric under impact is studied by using M = 6.5, 5.5 and 4.5 kg, while the initial velocity and contact area are selected as v0 = 1.98 m/s (0.2 m in height) and A0 = 165.13 cm2, respectively. Besides, two damping ratios, that is, ζ = 0 and 0.02, are also included to investigate the combined effect.
The way in which the striker mass changes the acceleration and displacement response is illustrated in Figure 7, where higher accelerations in the elastic and plateau phases can be observed for the impact with a lower striker mass. However, the responses in the densification phase of the spacer fabric for different striker masses are just the inverse to that in the elastic and plateau phases. The spacer fabric with the damping effect also responds differently in different phases. Higher acceleration in the elastic and plateau phases and lower acceleration in the densification phase can be observed for the impacts with damping ratio 0.02 compared with the undamped cases. It is evident that the damping behavior can reduce the peak acceleration and peak displacement obviously. Unlike the effect of the initial velocity, the effect of the damping ratio on the peak acceleration is not clearly affected by striker mass.
Effect of striker mass on the impact response.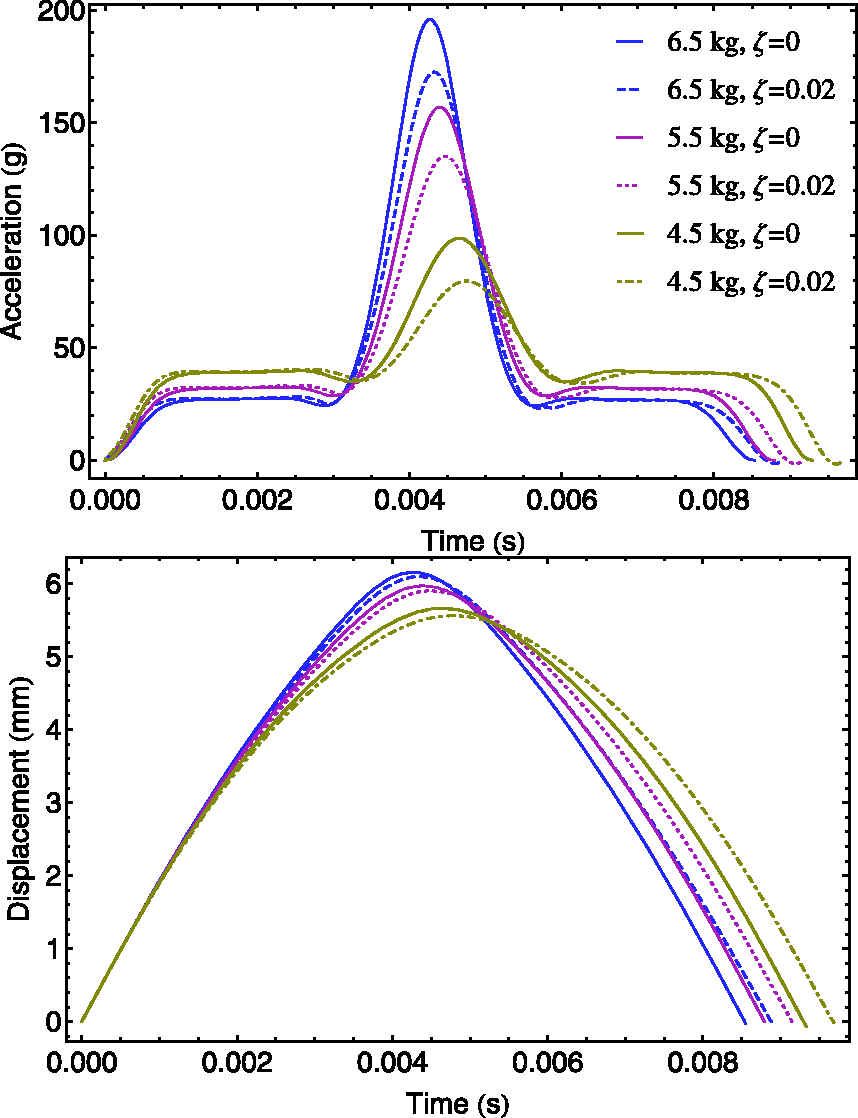
Effect of striker mass and initial velocity at a constant kinetic energy
The effects of the initial velocity and striker mass discussed above are both based on different total kinetic energies. For a predefined kinetic energy, the striker mass is the counterpart of the initial velocity. The combined effect of the striker mass and initial velocity for a constant energy is discussed here. The kinetic energy of 12 J is chosen with three pairs of striker mass and initial velocity, that is, 6 kg with 2 m/s, 4 kg with 2.45 m/s and 2 kg with 3.46 m/s, while the contact area is selected as A0 = 165.13 cm2, and two damping ratios ζ = 0 and 0.02 are also included.
Figure 8 shows the curves of acceleration and displacement against time for different striker mass and initial velocity pairs and damping ratios. The predictive results indicate that, at the same kinetic energy, the impact response can be different. For the impact with a higher mass and a lower initial velocity, the spacer fabric gives a lower acceleration and undergoes a longer duration impact. The damping effect is also affected by the initial velocity at the same kinetic energy level that a higher initial velocity leads to a greater reduction in acceleration resulted from damping. However, in spite of the different acceleration and duration responses, the fabric with the different initial conditions has equal peak displacements for both damped and undamped cases.
Effect of striker mass and initial velocity on the impact response for a constant kinetic energy.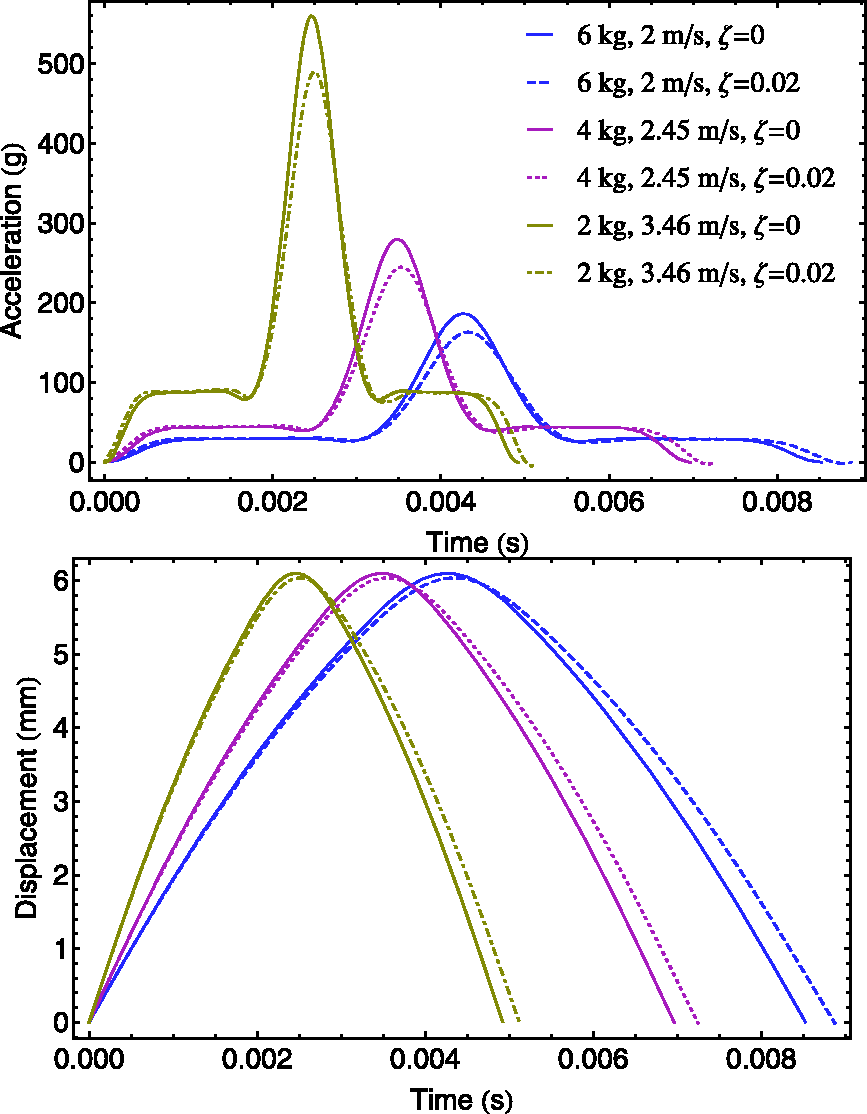
Effect of contact area
Five sizes are selected to study the effect of contact area on the impact compressive response of the spacer fabric, that is, A0 = 165.13, 153.9, 132.7, 113.1 and 95 cm2, while the striker mass and initial velocity are selected as 6.5 kg and 1.4 m/s, respectively. The damping ratios ζ = 0 and 0.02 are also included.
Figure 9 shows the curves of acceleration and displacement against time for different contact areas. It can be found that different contact areas result in different accelerations, displacements and durations for both undamped and damped cases. While the spacer fabric with a larger contact area corresponds to higher accelerations in the elastic and plateau phases, the peak acceleration and duration of impact are not monotonously changed with the contact area, but the peak displacement is increased with the decrease of the contact area. Peak acceleration plotted against static stress is called the cushion curve, which is the most commonly used method to select proper cushioning materials for protective applications.
14
Static stress is the quotient of striker weight and contact area. For a constant striker weight (6.5 kg), the static stress for the impacts increases with the decrease of contact area. Thus, it can be argued that the peak acceleration decreases first and subsequently increases with the increase of static stress. This means that an optimized size of the spacer fabric exists for minimizing the peak acceleration.
Effect of contact area on the impact response.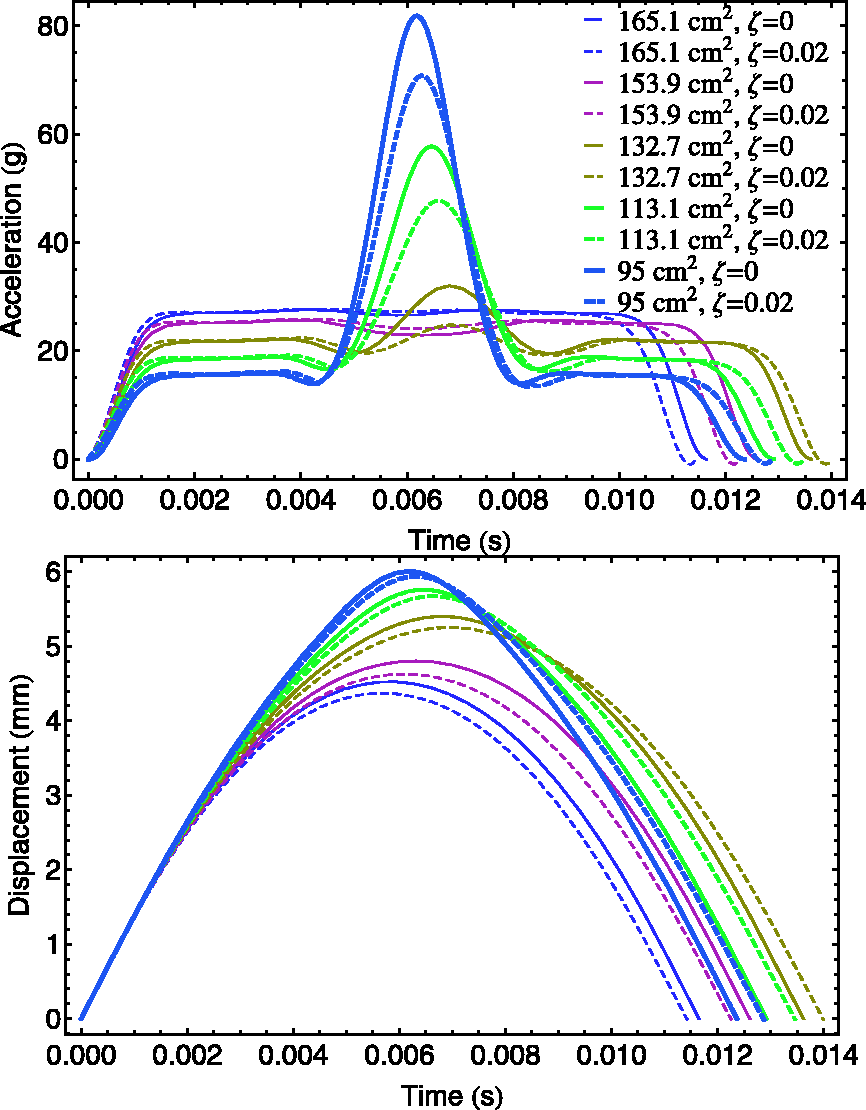
Experimental validation
In our previous work, the flatwise compressive behaviors of a series of warp-knitted spacer fabrics in the form of a 14.5 cm diameter circle under drop-weight impact with the same height and mass of striker (0.2 m and 6.5 kg) were studied. 8 In fact, the experimental results using a particular test condition cannot completely characterize the impact behaviors of spacer fabrics because they behave differently under different initial conditions due to the rate sensitivity and damping effect. Used as cushioning materials for human body protection, warp-knitted spacer fabrics will be subjected to impacts with a wide range of initial conditions, including various velocities, striker masses, impact energies and contact areas. Therefore, to fully characterize the impact behavior of spacer fabrics, a large number of impact tests with various initial conditions should be carried out. In this connection, the dynamic model capable of predicting the impact responses of spacer fabrics under various conditions based on quasi-static compressive results is useful to reduce the time and cost in experimental trials.
To validate the dynamic model developed in this part, a comparison between the experimental and predictive impact responses is made using the typical spacer fabric S1 selected above. A series of impact tests were performed by adjusting the sample size and drop height of the striker using a drop-weight impact tester equipped with a circular planar striker (6.5 kg) and anvil. The striker and anvil have the same diameter of 15 cm. The detailed test method was described in our previous paper. 8 The accelerations of the striker were measured during the impacts. The spacer fabric was cut into five sizes in a circular form using a GFK Marcatex FLEXI-150, that is, 14.5, 14, 13, 12 and 11 cm in diameter, which correspond to areas of 165.1, 153.9, 132.7, 113.1 and 95 cm2, respectively. Two drop heights (0.4 and 0.6 m) were chosen for the striker to drop onto the spacer fabric samples. Three tests were conducted for each test condition. According to the time–temperature equivalence principle, the damping ratio is sensitive to strain rate. A higher initial velocity gives a higher damping ratio. As the damping ratio of the polyester monofilament ranges from 0.01 to 0.1, two damping ratios 0.04 and 0.06 were empirically selected for the impacts with the drop heights of 0.4 and 0.6 m, respectively.
Figure 10 shows the experimental and predictive time–acceleration curves of the spacer fabric of 14.5 cm in diameter for the two drop heights. Good agreements between the experimental and predictive results are observed. In particular, the predictive peak accelerations are very accurate. Peak acceleration is directly proportional to peak impact force, which is a measure of the impact protective performance. Figure 11 presents the experimental peak accelerations of the spacer fabric with different sample sizes under impacts of drop heights 0.4 and 0.6 m. The cushion curves calculated using the dynamic model with or without damping by plotting peak acceleration against static stress are also included for comparison purposes. Contact area A0 in Equation (11) was assigned with a value from 78.54 to 785,398.2 cm2 to get the corresponding peak accelerations, while static stress is the quotient of striker weight (6.5 kg) and contact area (78.54–785,398.2 cm2). It can be found that the predictions on the peak accelerations by considering the damping effect are accurate, whereas the predictions without damping are much greater than the experimental results. The cushion curves are effective to show the resultant peak accelerations for a wide range of static stress or contact area.
Comparison between experimental and predictive impact responses of the spacer fabric in the form of a 14.5 cm diameter circle at drop heights of (a) 0.4 m and (b) 0.6 m. Experimental results and cushion curves of the spacer fabric at a drop height of (a) 0.4 m and (b) 0.6 m.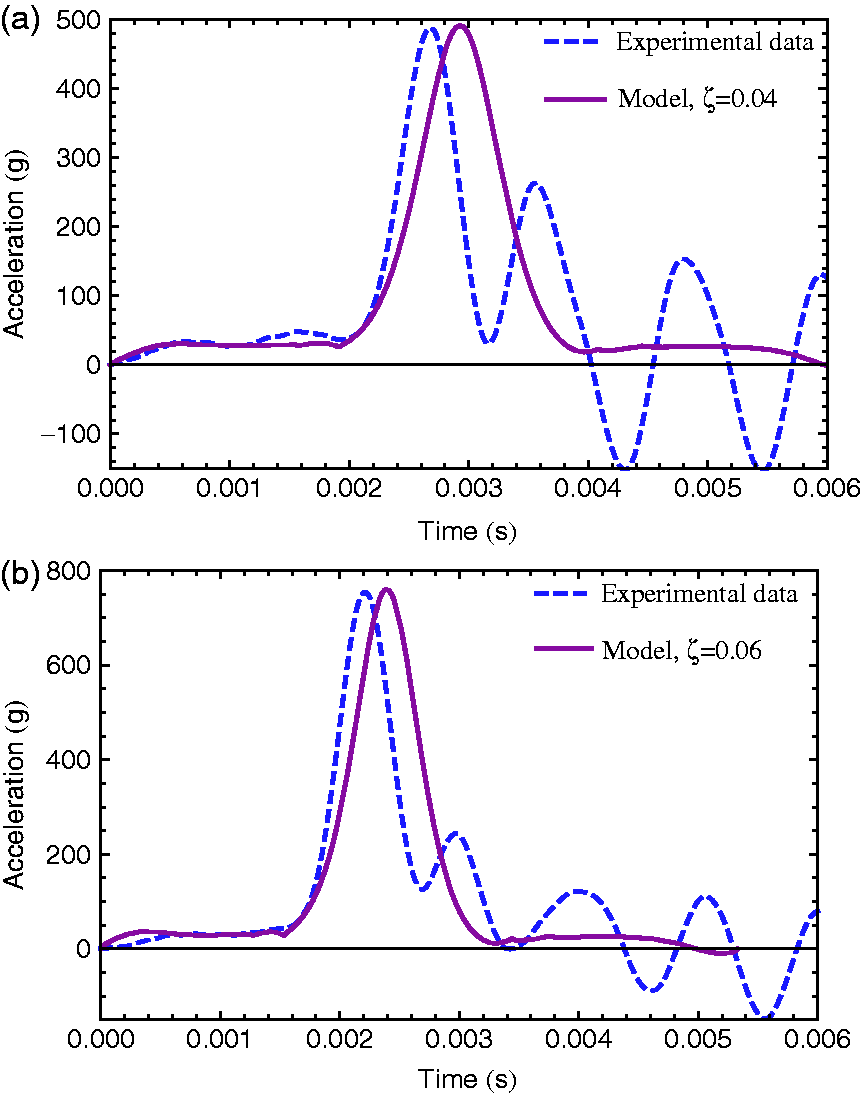
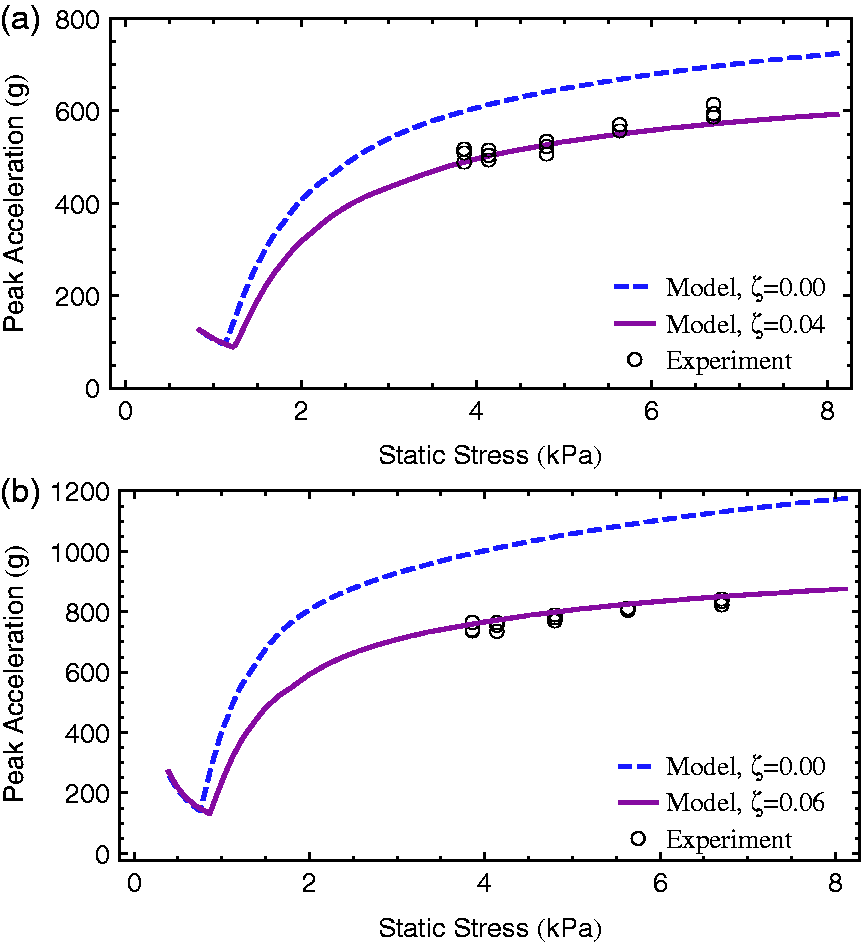
It is noteworthy that each cushion curve has a point of inflection with the lowest peak acceleration. This point represents an optimum loading where there is sufficient force to deflect or crush the fabric and cause the deceleration to be spread over a longer period of time. This optimum point divides each cushion curve into two portions. On the left-hand portion, the striker does not deflect the fabric sufficiently, leading to a rigid impact with high acceleration levels. On the right-hand portion, the fabric is being overloaded and the striker continues right through the cushion with high acceleration levels as well. Hence, it is desirable to use the cushion in the lower portion of the curve where its performance is optimum. For human body impact protection, when the force tolerance of each human body part and the potential impact energy are known, the usable range of cushion area can be determined using the cushion curve for a given warp-knitted spacer fabric. The dynamic model enables the creation of cushion curves of warp-knitted spacer fabrics based on quasi-static compressive stress–strain curves instead of conducting a large amount of impact tests. It can be an effective tool to assess the impact compressive responses and cushioning performance of warp-knitted spacer fabrics under impact of various loading conditions.
Conclusions
A dynamic model for predicting the impact compressive responses of warp-knitted spacer fabrics under various loading conditions using quasi-static compressive stress–strain data was established. The model was used to parametrically study the impact compressive responses of a typical warp-knitted spacer fabric in terms of damping ratio, initial velocity, striker mass and contact area. Meanwhile, the experimental results of a typical spacer fabric obtained from drop-weight impact tests with different drop heights were also used to validate the model. According to the parametric analysis and the comparison between the experimental and predictive results, the following conclusions can be drawn:
damping of yarn materials reduces the peak acceleration and peak displacement, regardless of loading conditions, and the increase of initial velocity enhances the damping effect; increasing the initial velocity or striker mass while keeping the counterpart constant increases the peak acceleration and peak displacement; either increasing striker mass or decreasing the initial velocity for a constant kinetic energy can reduce the peak acceleration, but the peak displacement remains constant; an optimal size of a warp-knitted spacer fabric exists for achieving minimal peak acceleration under impact at a certain kinetic energy; the dynamic model is effective in assessing the impact compressive responses and cushioning performance of warp-knitted spacer fabrics under impact of various loading conditions.
The dynamic model provides a practical modeling approach to enhance the understanding of the effect of damping and loading conditions on the impact compressive responses of warp-knitted spacer fabrics. With a simple quasi-static compressive test, the dynamic model can numerically predict the full time-response of warp-knitted spacer fabrics under various impact conditions. The dynamic model incorporated with the constitutive model presented in Part I can be very useful in the design or selection of suitable warp-knitted spacer fabrics for developing impact protectors for human body protection.
Footnotes
Funding
This work was supported by the Research Grants Council of Hong Kong Special Administrative Region Government (Grant No. 516011).