
Abstract
In order to progress the research on automatic separation of fabric pieces from a cutting pile during the garment manufacture, a summary of the methods of grasping was made. Next, the process of cut garment pieces grasping by soft fingers was defined, and the mechanical model was analyzed in detail. After that a grasping experiment by soft fingers was carried out. The experiment results show that the parameters of a soft finger (positive pressure, opening distance) and the parameters of the fabric (grams per square meter, thickness, friction coefficient, stiffness) have great influence on the grasping effect. Furthermore, a grasping model was proposed. Finally, a test experiment was implemented to verify the applicability of the model proposed. This paper mainly contributed a bridge between the parameters of fabrics and the parameters of soft fingers which can help greatly to select or to design a suitable soft finger according to the properties of a fabric accurately and quickly. In addition, the grasping model of fabric pieces of garment by using robotic soft fingers was found to have a good potential applicability in the field of smart manufacture of garment in the near future.
On reviewing the development of apparel industry over the past decades, the goal of automated production or smart manufacturing has been achieved in some areas.1–3 In the part of fabric spreading, the automatic spreading equipment can carry out the operations such as laying-up with low tension, cutting-off the fabric, feeding a roll of fabric, and so on, and the whole process needs few manual works. For the cutting machines, they can undertake the cutting work after paving, and the covering of a plastic film, positioning, and cutting can be fully automated, which is even suitable for striped or lattice fabric that traditionally requires more complicated cutting skills. For the operation of sewing, it is usually considered to be the hardest part to produce automatically and must be operated by high-skilled workers by hand. However, in recent years, types of template equipment entered into the flow of sewing, which can automatically sew on a piece or assemble components into a part of clothing. The template machines can complete the process with different templates, which include sticking bags for a patch pocket, digging bags for a welt pocket, forming collars, assembling cuff vent, and other sewing on a flat surface. With the application of template technology, the demand for high-skilled workers has reduced sharply, which has progressed the manufacture of clothing greatly.
Focusing on the procedure of the clothing industry from cutting to sewing, there remains a big challenge to automatically separate the fabric pieces layer by layer from the pile of pieces produced by the cutting process, which is an obvious bottleneck for the automatic manufacturing of garments. The fundamental reason for this is that the flexibility and deformability of fabrics are so hard to predict and control. But the bottleneck must be broken through. If the grasping, separating and transporting of fabric pieces of an apparel can be done by a mechanism system, and further cooperate or unite with template technologies, the level of automation of the apparel industry will be greatly improved.
According to the industrial technical requirements of garment manufacturing, the pattern pieces of a cutting pile must be separated layer by layer to minimize the color difference for a ready-to-wear clothing. It remained a huge difficulty for decades to use a mechanical structure to move fabric pieces layer by layer from a pile. It is still a hot point for the research of smart manufacturing of apparel, and a lot of researchers have contributed their meritorious efforts.
According to the research idea, the principle to grasp or separate fabric pattern pieces by a mechanical device or system can be divided into three categories as follows: physical adsorption, adhesion type and mechanical clamping.
The physical adsorption type can be divided into air pressure adsorption type and electrostatic adsorption type. The former is mainly designed according to the principle of air negative pressure, which consists of the Bernoulli suction cup grab, 4 vacuum adsorption grab5,6 and ordinary suction cup grab. 7 The head of the vacuum adsorption grab and the ordinary suction cup grab must touch the surface of the cutting piece to grasp, whereas the Bernoulli suction cup grab can work in a non-contact way. The latter achieves this by using static electricity 8 to adsorb the fabric piece.
The adhesion type means adding adhesive medium between the grab head and the cuttings to grasp and separate. According to the different medium, the adhesion grasping methods are divided into adhesive grab type 9 and frozen grab type. 10 The former is to add adhesive material to the surface of the grab head, using the adhesive force of the material to stick the pattern pieces. The latter is to moisten the fabric before grasping, and then touch the cutting pieces with a low temperature grab head.
The mechanical clamping type refers to the way of grasping fabric pieces by simulating the movement of the human hand with a manipulator. There are two main kinds of claws: mechanical rigid claw and bionic claw. The former can be divided into hook-type grab 11 and hook-prick-type grab.12,13 The hook-type grab is to hook, to pull and to rub the pieces; and the hook-prick-type grab is to grasp the cutting pieces by using the principle of the magic clasp. The bionic claw uses the bionic finger robot to simulate the human hand to pick up the pieces. 14
The different grasping methods are shown in Figure 1, and the advantages and disadvantages of them are shown in Table 1, where ○ indicates good, - general, and × poor.
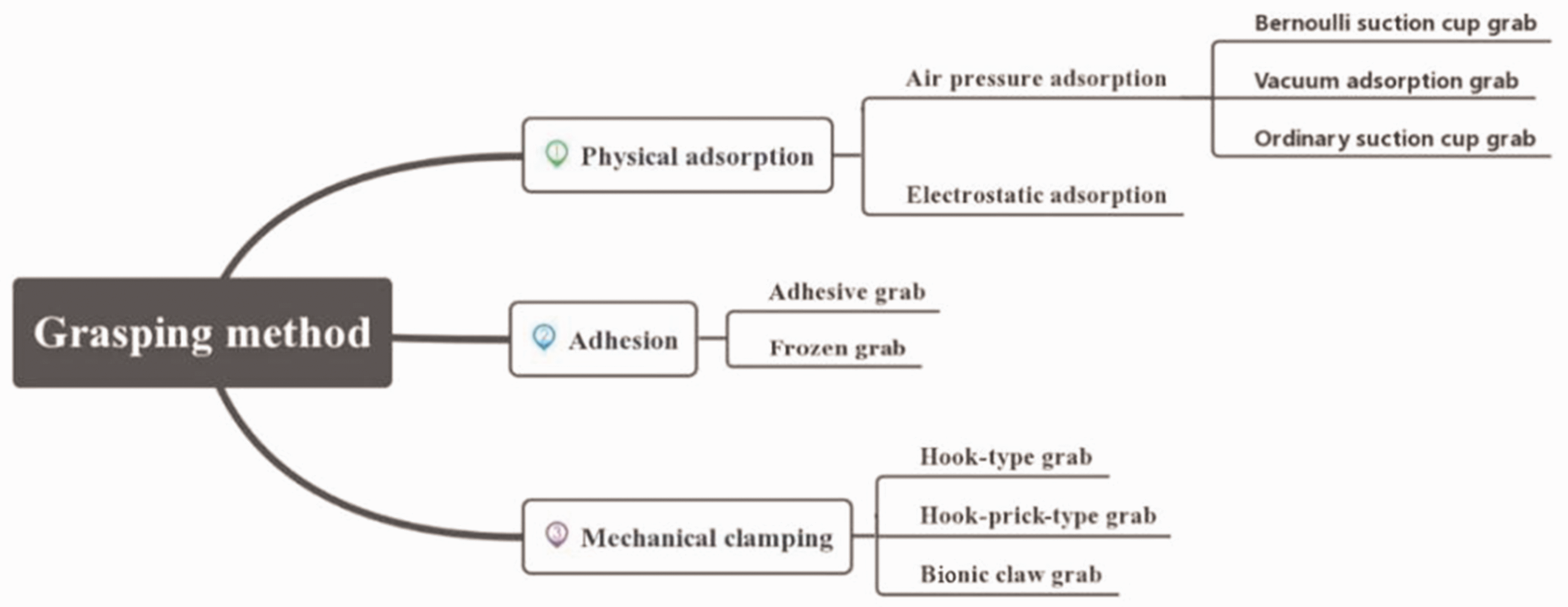
Grasping method.
Advantages and disadvantages of grasping methods
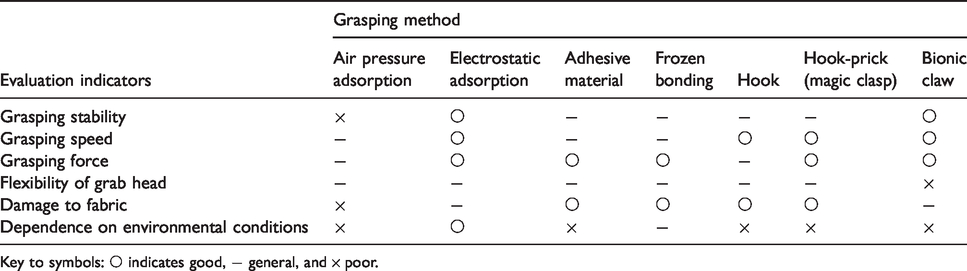
Key to symbols: ○ indicates good, − general, and × poor.
Overall, the effect of the air pressure adsorption grab is unstable, because it is prone to grab layers of cutting pieces at one time, and is more suited to grab high density fabrics or a single layer piece. The stability, speed and force of grasping of the electrostatic adsorption grab are good, but the adsorption force is weak, so it is usually used to grasp a thinner or lighter fabric piece; further, it is more dependent on the operating environment, such as the appropriate humidity. The adhesion grasping grab may cause fibers to remain on the grab head and adhesive materials to remain on the fabric; this needs extra treatment and inevitably decreases the grasping effects. Both hook-type grab and hook-prick-type grab are certain to damage the fabric surface lightly or heavily, which may lead to quality problems. When the fabric is gripped with the bionic claw, the grasping effect has good stability, and has no selective requirement for the performance of the fabric or the conditions of environment; therefore the bionic claw can be applied to grasp a variety of fabric pieces. But the bionic claw is mostly made of rigid materials that are likely to damage the fabric.
In recent years, the rise of soft robots and their applications in the automation field have inspired a new way to separate fabric pieces layer by layer for apparel industry. 15 The soft finger is a kind of soft robot which is biomimetic, made from flexible materials such as silica. 16 It not only has a just-right softness and rigidity similar to human hands, but also has a considerable capacity of deformation and recovery, which can highly simulate the movement of human fingers to rub, knead, twist and grasp, as well as other meticulous actions (Figure 2). Soft fingers show a potential affinity to the soft materials such as fabric pieces without damaging their surface properties.
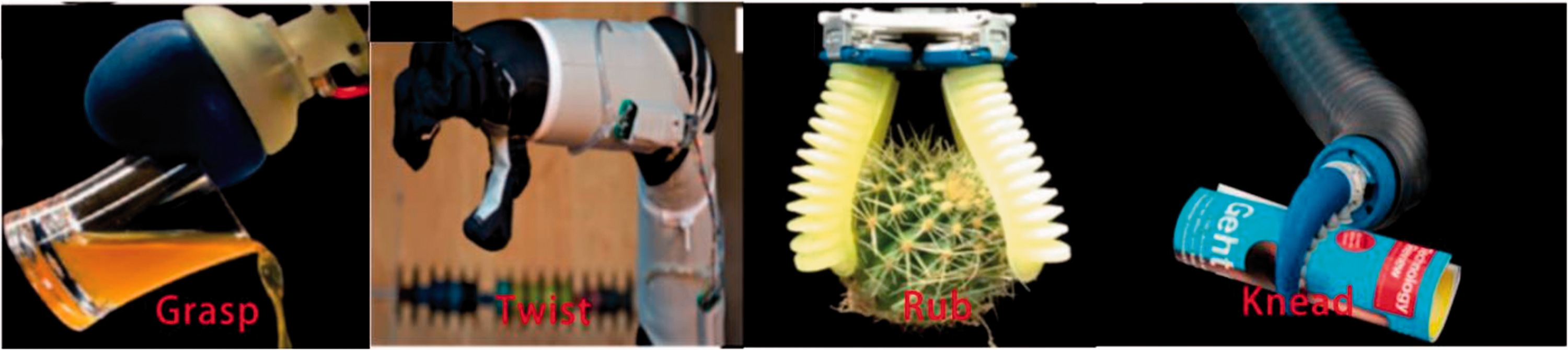
Soft fingers and their applications.
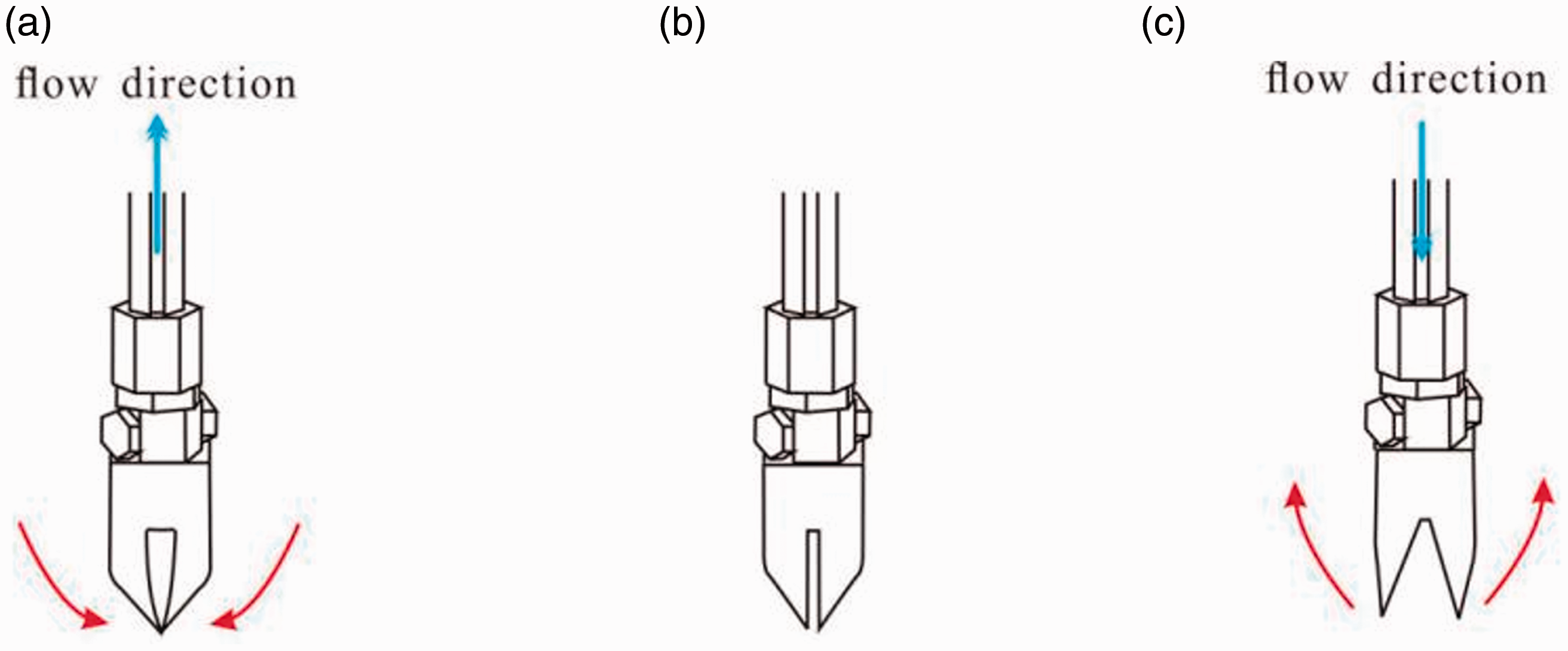
In 2020, Ku et al. designed a fabric grasping soft finger with embedded microneedles. 17 The soft finger structure and the process of grab are shown in Figure 3. The design was inspired by the adhesion mechanism of a parasitic fish called a lamprey. The proposed gripper not only is able to pick up and hold a single sheet of fabric from a stack but also does not make any damages on it. The gripper showed high success rates in picking up a single sheet of air permeable fabric, but it is not suitable for thinner fabrics, or easily damaged fabrics such as silk.

Embedded microneedles to grasp a fabric.
In this paper, we use soft fingers designed by Suzhou Rochu Robotics Co. Ltd 18 for fabric grasping, which are inspired by the gesture of human hands to uncover a piece from a cutting stack. The structure and work presentation are shown in Figure 4.
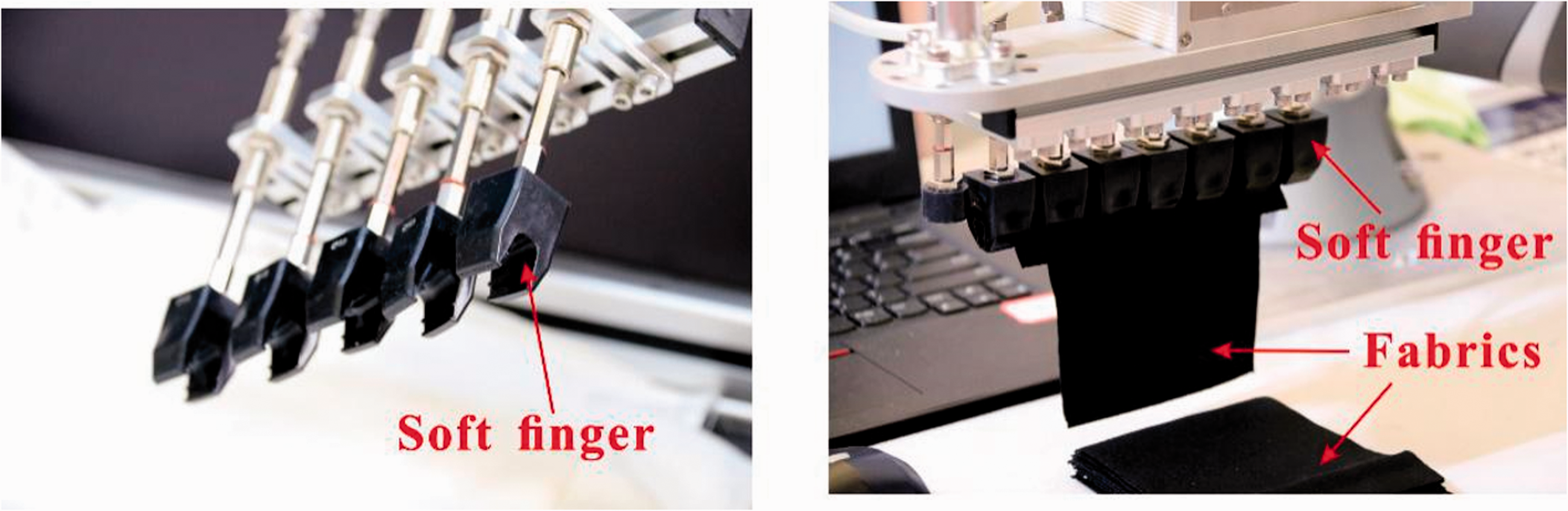
Soft fingers used in this paper.
In order to separate fabric pieces automatically layer by layer by soft fingers, this paper carried out a pre-experiment. It was found that the air pressure that is input into the cavity of the soft finger could affect its working interface, such as the opening distance of the soft finger, the friction coefficient of the finger surface, the positive pressure given by the mechanical control mechanism, and so on, which affects the accuracy and reliability of the grasping and separation. A successful separation significantly depends on two items: reliable grasping and accurate layer-by-layer separation. First, grasping needs to have full accuracy and reliability, and at the same time, it cannot change or damage the fabric. Second, it must only grasp one single layer at a time; and third, it must have high stability and repeatability. This paper mainly contributed a bridge between the parameters of fabrics and the parameters of soft fingers that can help greatly to select or to design a suitable soft finger accurately and quickly according to the properties of a fabric.
Theoretical background
Grasping process
Referring to the description of the grasping process by Haitao et al., 16 there are four processes for our soft finger to grasp and separate a single fabric piece from a cutting pile, as shown in Figure 5: arching up, slipping, grasping and separating.
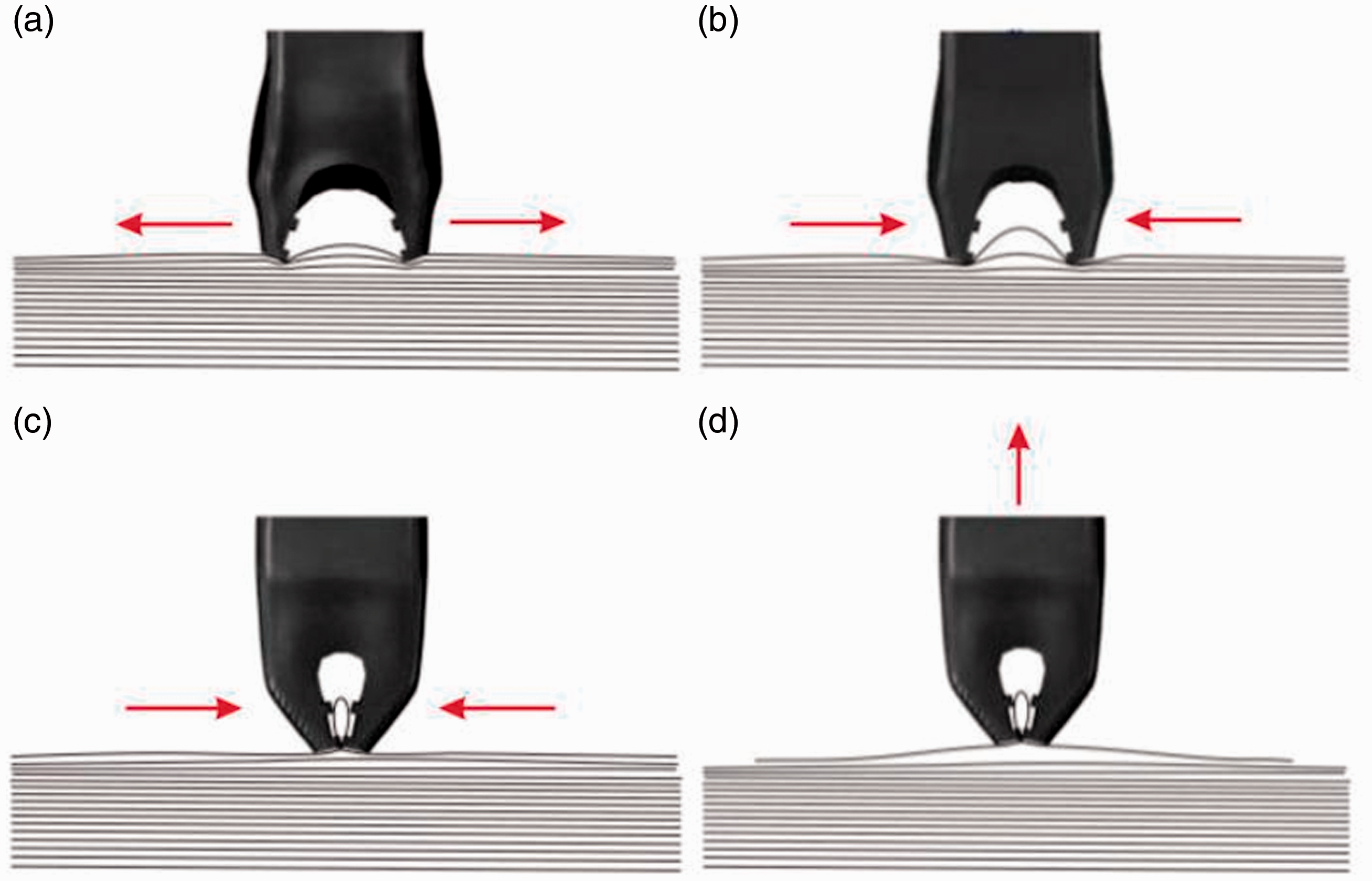
Schematic diagram of grab process. (a) arching up (b) slipping (c) grasping (d) separating.
Firstly, a positive pressure is injected into the soft finger; the tip of the finger will expand, and at the same time, the finger moves downward and touches the top piece of fabric under a certain slight pressure. Due to the flexible and deformable characteristics of fabrics, the pressing of the finger tip on the fabric causes the fabric to deform, and the fabric arch is formed between the two contacted points of the finger tip, as shown in Figure 5(a). By keeping the downward pressure of the finger constant, and changing the pressure inside the finger from positive to negative, the soft finger bends inward, and the opening distance of the finger tip becomes short, which causes the top piece to arch more, as shown in Figure 5(b). Next, the finger narrows the gap of the tips until a tight grasp is achieved, as shown in Figure 5(c). Finally, keeping the air pressure in the finger unchanged, the mechanical arm system lifts the finger upward to separate the top fabric piece successfully, as shown in Figure 5(d). Such repeated operations can achieve the goal of separation of fabric pieces layer by layer from a cutting pile.
It is obvious that the first and the second processes are the key to achieve the goal of separation from the analysis above. First of all, the first layer piece must arch well to form an action point to be caught. Second, when the tips of the soft finger narrow until almost closed, it can only drive the uppermost piece to form a further arch instead of arching the next layer below; thus the soft finger can grasp the arched part of the piece to complete the separation.
Mechanical model
The stress analysis for when the soft finger is in contact with the top piece, that is the process of Figure 5(a), is shown in Figure 6(a). At a certain range, the greater the positive pressure
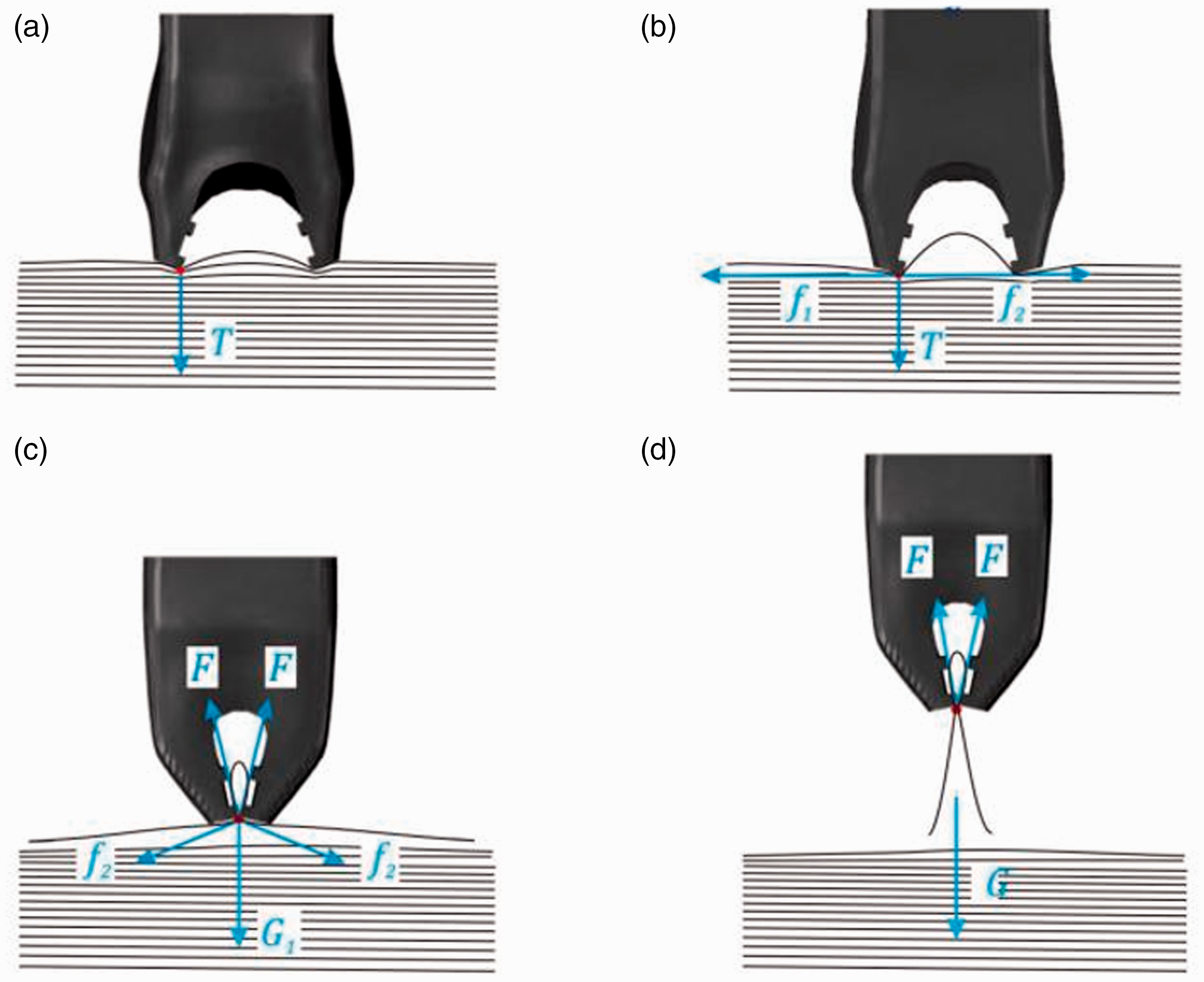
Force analysis of soft finger during grab. (a) touching (b) grasping (c) incomplete separation (d) complete separation.
The soft finger grasps the fabric piece (Figure 5(b) and (c)), the purpose of which is to drive the arch to further expand. The larger the arch is, the easier the piece gets caught. The force analysis is shown in Figure 6(b). When the static friction
When the cutting piece is caught by the soft finger, the manipulator needs to drive it by lifting upward to separate the top piece from the pile. So, the next key for a successful separation is to prevent the fabric sliding out of the soft finger. The force analysis is of two processes as shown in Figure 6(c). One process occurs when the fabric piece is just caught by the finger but does not carry away from the pile; there is a relative sliding between the top layer and the next layer, which produces a sliding friction force
Further parameters to consider are the following: the positive pressure
Based on the theoretical discussion above, this paper attributes the parameters which influence the separation effect as follows: the opening distance
Experiment conditions
The main purpose of this paper is to explore the relationships between the control parameters of a soft finger and the performance parameters of a fabric and finally to formulate a model to describe the relationships. Therefore, this paper will firstly carry out experiments with different soft fingers and various fabrics to explore the relationships between them. Correspondingly, a test will be done once the model is obtained to verify its reliability.
Soft fingers
There are two kinds of soft finger made of a silica used in the experiment; they are both produced by Suzhou Rochu Robotics Co. Ltd. An experimental system was composed of a pneumatic driver and an external remote controller besides the soft fingers (Figure 7). The work diagram of the system is shown in Figure 8. The basic process works as follows: (a) connecting the finger and the pneumatic driver using trachea, and adjusting the air pressure knob of the driver to changing the finger’s opening width and grasping forces; generally, a greater air pressure may produce a wider opening width; (b) controlling the air pressure of the pneumatic driver through an external remote controller to change the action of the finger; the finger closes under a negative pressure state, and opens under a positive pressure state (Figure 9); and (c) driving the mechanical arm to move the pieces, completing the loading and unloading operation. For different fabric shapes or, in fact, a different area of the fabric piece, we usually appoint the number and the position of the fingers to achieve this (Figure 10).
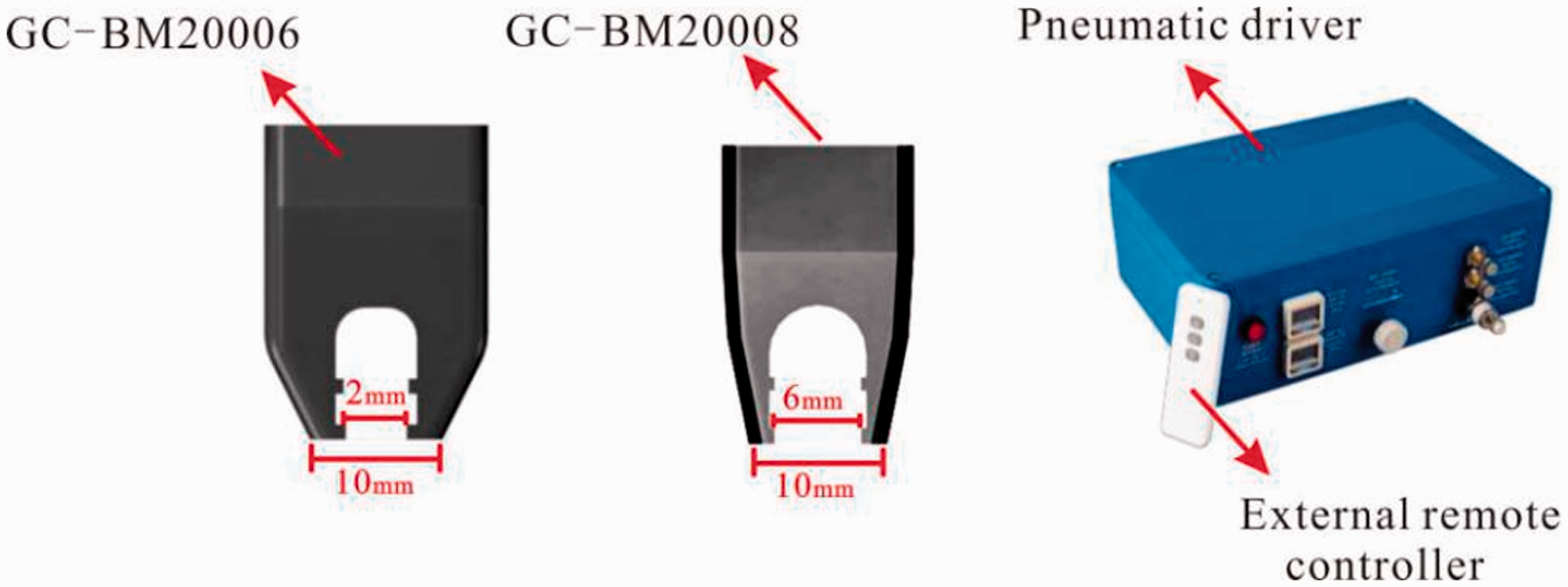
Soft fingers, air pressure driver, and external remote controller.
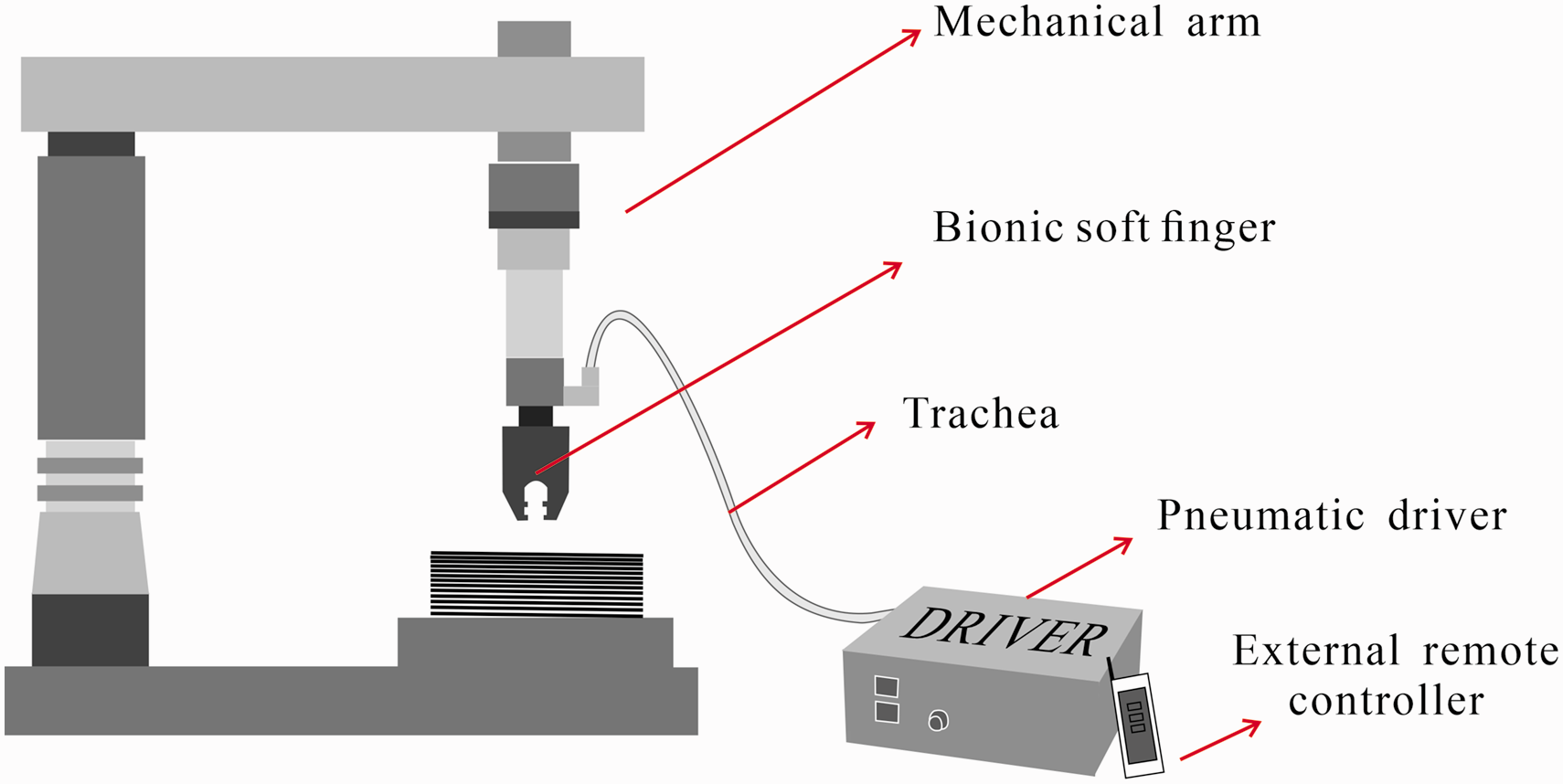
Diagram of the bionic soft finger system.
Working status of a soft finger. (a) under negative pressure (b) pressure-free (c) under positive pressure.
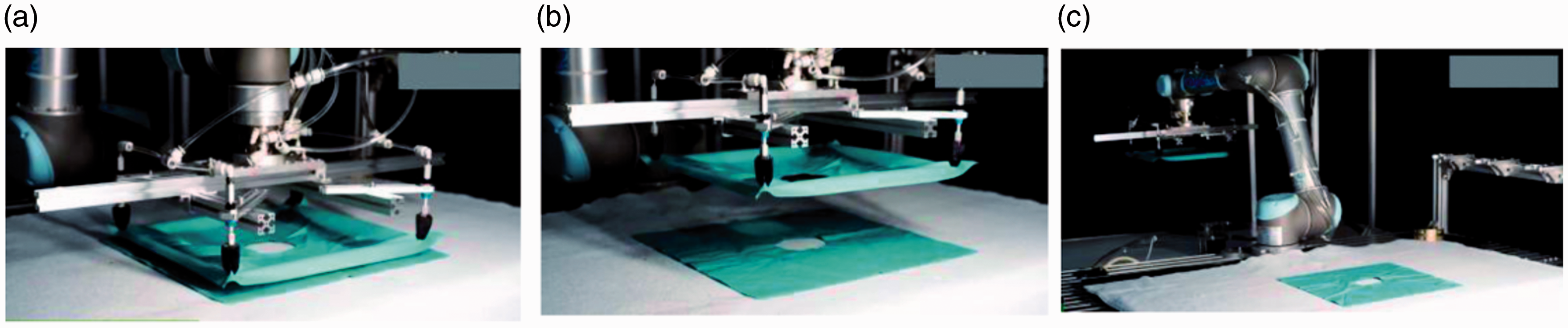
Appointment of soft fingers to load and unload fabric pieces. (a) muti soft fingers to grab (b) separate from a pile (c) transport and release.
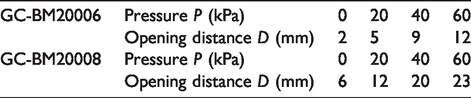
The maximum opening distance of the soft finger is determined by the maximum pressure tolerance of the finger material (silica gel). To make the experimental data comparable, we chose two kinds of finger with different opening distances under the same pressure, as shown in Figure 7 and Table 2. The difference between them is mainly in their wall thickness. The gripper with the thinner wall (GC-BM20006) can open wider than the one with the thicker wall (GC-BM20008), because it produces a correspondingly weaker clamping force when closed. In fact, there is only a very little difference between clamping forces (about 0.4 N). Therefore, the influence of the clamping force difference is not considered in this study.
Pressure and opening distance of soft fingers
Fabric properties
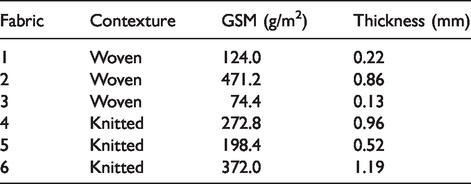
To avoid the influence of static electricity and to simplify the study, six kinds of pure cotton fabric with different contexture, thickness and grams per square meter (GSM) were used as the research objects. Their properties are shown in Table 3.
Properties of six different fabrics
Empirical grasping model
Grasping experiments
Our pre-experiment found that the positive pressure will merely cause the deformation of the uppermost three to eight plies on a cutting pile, which impacts the grasping effect significantly. Therefore, five layers of pieces were used in this experiment to simulate a real cutting pile which may be dozens of plies. In addition, it is also found that the distance from the grab position to the edge of a piece has a definite influence on the grasping effect. Hence, the six kinds of fabrics are all cut into a round shape with a diameter of 200 mm and five plies overlap facing up into a pile. Two kinds of soft fingers were used to grasp the center point of each piece. In the first grasping experiment, the pressure
According to the standard of ISO 5084:1996,
22
the YG-141 fabric thickness tester is used to test the thickness of the fabrics; we recorded their thickness with weights of 200 g as
Results of grasping experiment
The theory of viscoelastic materials may help to understand the phenomenon in the experiment. Fabric performs as a typical kind of viscoelastic material. The friction properties of viscoelastic materials used in this study are as follows: (a) when the positive pressure increases from a zero level, the friction force also increases proportionally, which can be deemed that the friction coefficient is fixed; however, when the value of positive pressure becomes greater than a certain critical value, the relationship between them runs in a nonlinear way; (b) the friction coefficient of viscoelastic material relates to the contact area and the relative speed of sliding; and (c) the coefficient of static friction of viscoelastic material is not greater than that of dynamic friction.25,26
The test results of friction coefficient are consistent with the theory of viscoelastic materials. Silica gel and fabrics are both viscoelastic materials; therefore, the SFC between silica gel and fabric is variable instead of constant as for rigid materials; the test shows that when the positive pressure becomes greater, the value of the SFCs
The DFC between two plies of fabrics also varies with the positive pressure by observing the values of
Impact factors
Thickness change rate
According to the above physical analysis and pre-experiment findings, the change of thickness will affect the arch of the fabric, and then affect the grasping effect. So, we introduced the idea of thickness change rate to express the interactive effect of grasping. The thickness change rate refers to the ratio of the thickness of a single cutting piece under pressure to that without pressure, which is expressed in
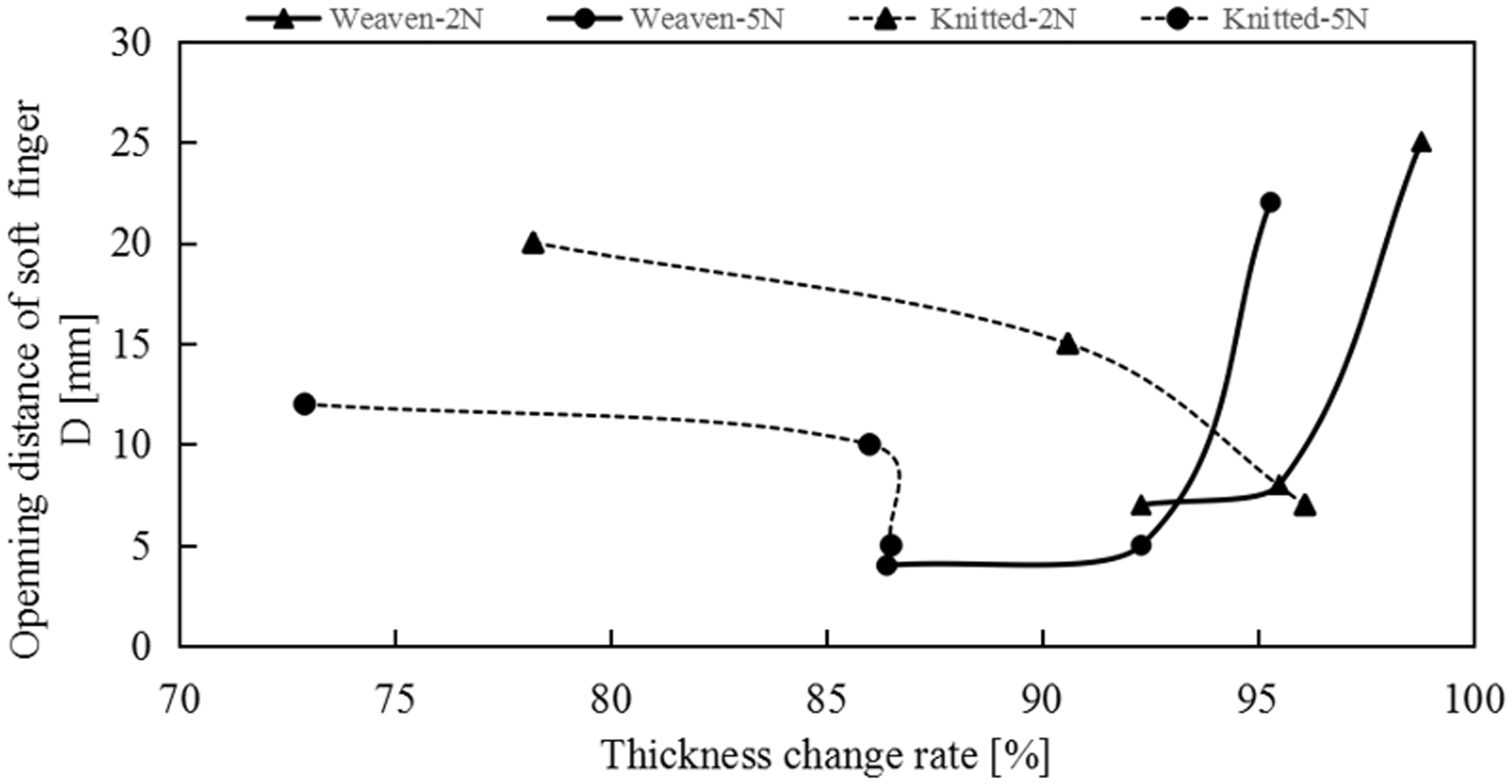
Relationship between
As shown in Figure 11, whether knitted or woven, the thickness change rate becomes smaller as the pressure on the fabric increases. It indicates that a greater pressure, or a thinner thickness, will relate to a smaller thickness change ratio. However, according to the experimental result, it is found that the thickness change rate is dependent of the fabric structure. The relationship between
We infer that there exist at least three cases for the representation above. First, for an extreme supposition, when a knitted fabric has no rate of thickness change, it has no possibility to be grasped. Second, knitted fabrics with a modest thickness change rate (approximate at 90–95%) generally have better extensibility than woven fabrics. Thus, when an open soft finger presses down onto the top piece in a pile, it will merely create a shallow pit on the top of the pile. At a micro level, the touched fabric will be elongated by the oblique shear force from the interface of the opened soft finger, which will drag the fabric and hence cut down the arch. Consequently, when the soft finger is going to lift and close, the positive pressure on the fabric will decrease sharply or even disappear in a very short moment. As a result, the extended fabric will retract back rapidly due to itsr elastic resilience, which will further shorten the arch, and which may collectively cause a failed grasping attempt. Third, knitted fabrics with high thickness change rate (<90%), which corresponds to quite soft fabrics, are easier to be grasped. The downwards pressure will cause a sunken concavity, which will be favorable to shape a higher arch. When the soft finger is going to lift and close, the depressed layers of fabric will rebound upward, which will arch up the arch by the natural force of elastic resilience, and will help the layer of fabric to be caught, finally achieving a perfect grasping result.
In contrast, the extensibility of woven fabrics is relatively poor; in the process of depressing and releasing pressure, only a few deformations emerge from the woven fabric, which means that the height of the arch remains nearly constant during the whole process. In short, the relationship between the thickness change rate of woven fabrics and the grasping effect shows a negative correlation.
Pressure of soft fingers
The relationships between the positive pressure
Relationship between
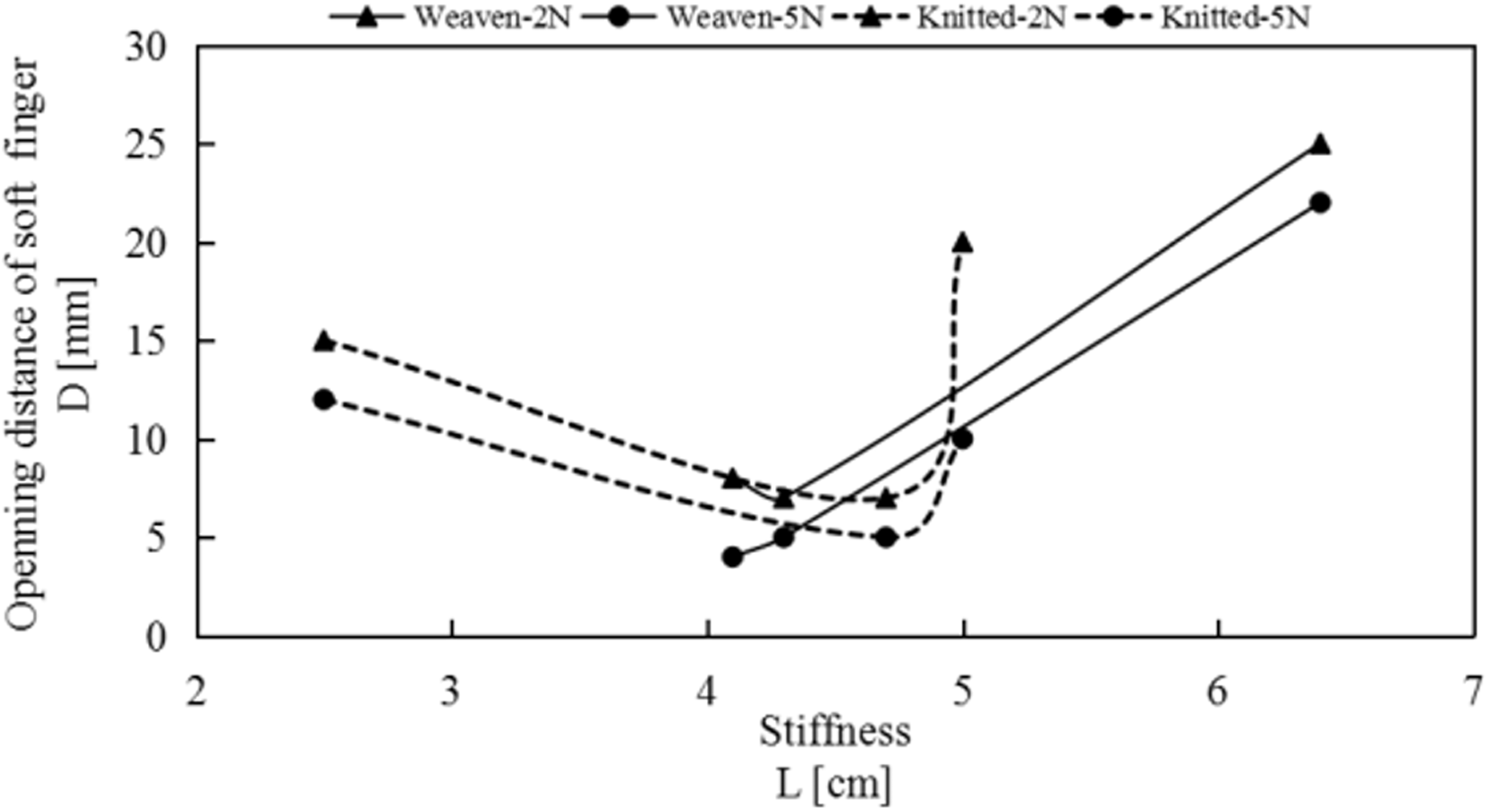
Stiffness coefficient
The relationships between stiffness of each fabric and the opening distance
Relationship between
Relationship between
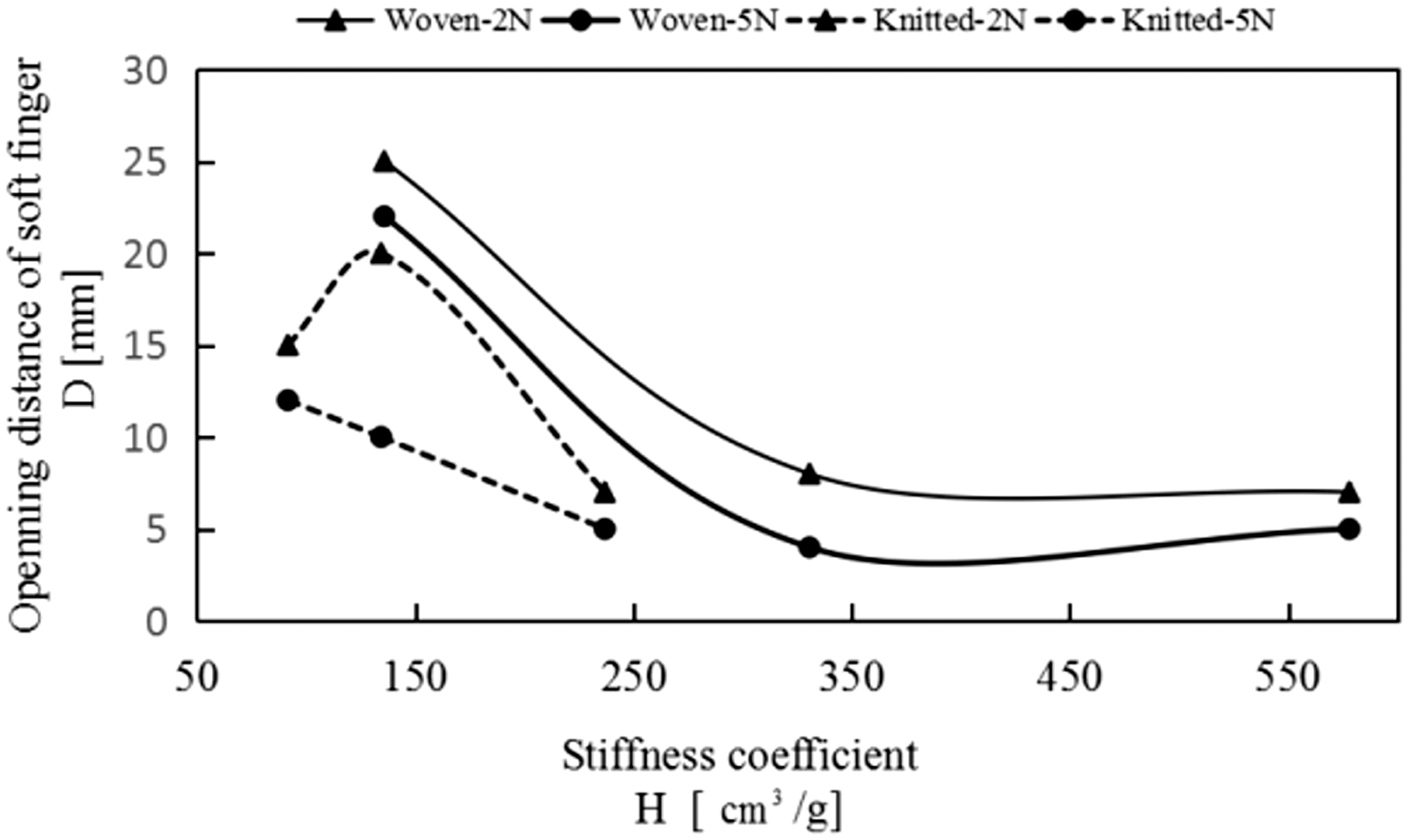
As shown in Figure 13, regardless of the cutting pieces of woven or knitted structures, the stronger the stiffness of the pieces, and/or the wider the opening distance
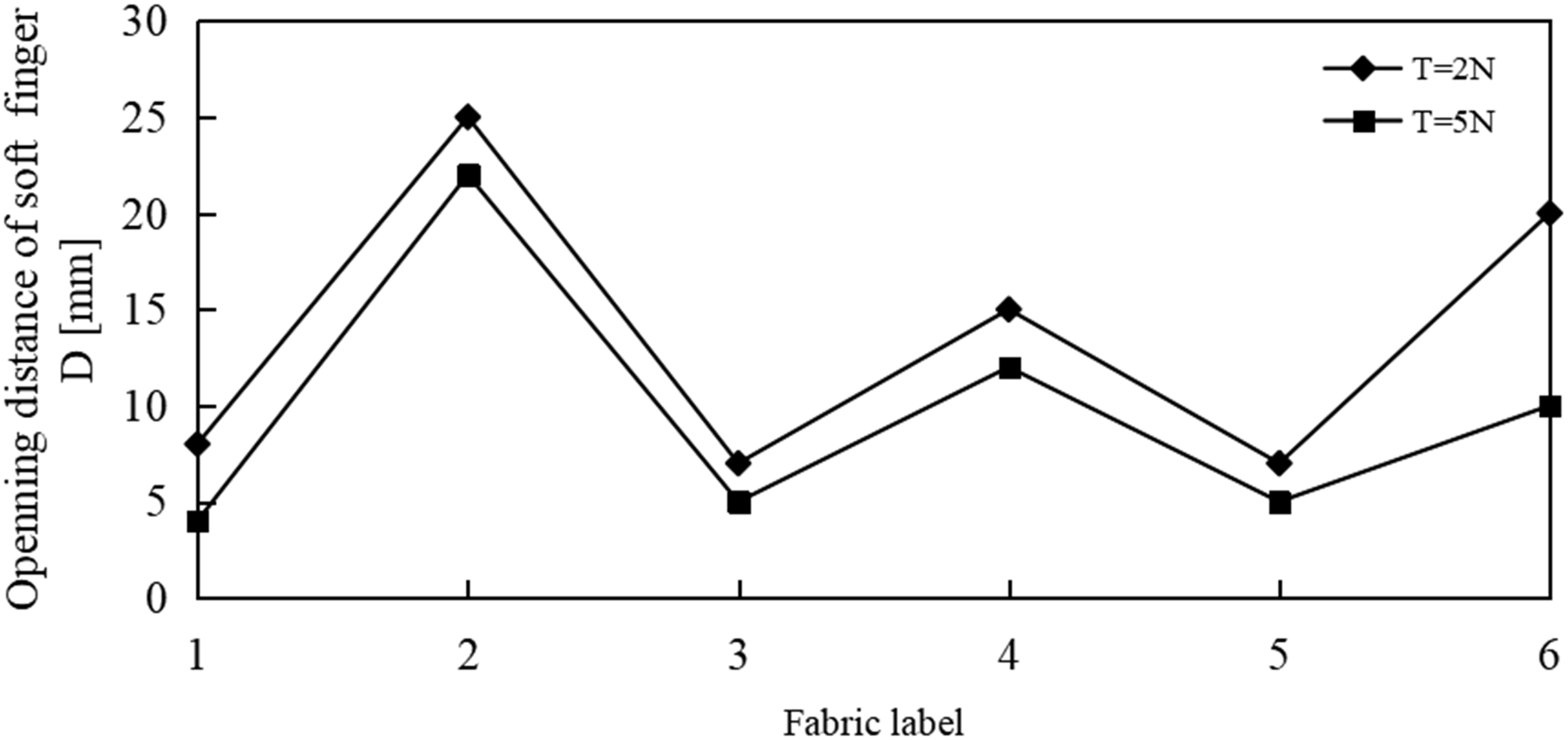
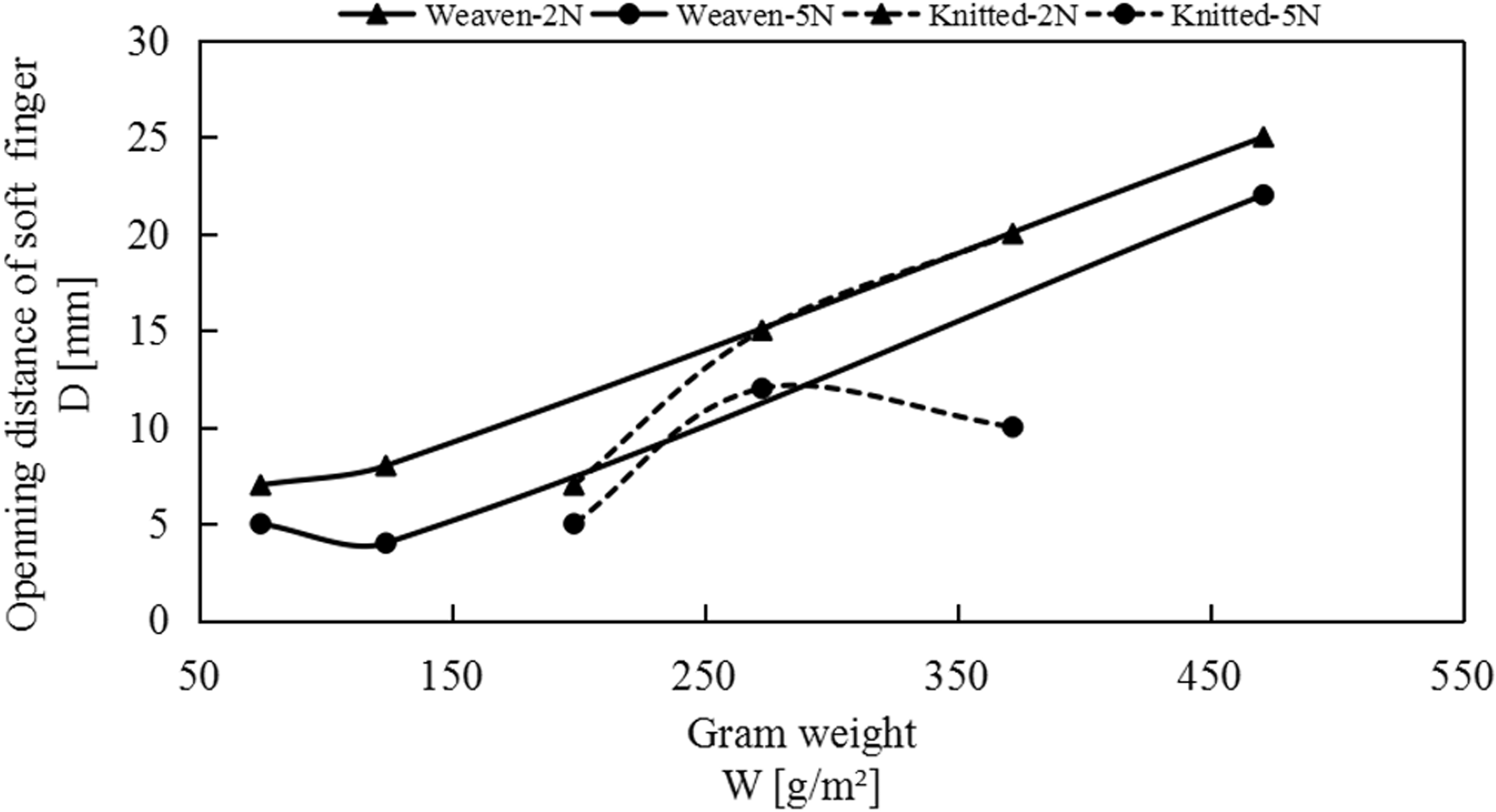
As shown in Figure 14, the general trend is that a heavier fabric needs a wider opening distance
In short, fabric stiffness, GSM and opening distance of soft finger have certain but unclear relationships. According to the common principle of physics, a softer fabric relates to a shorter stiffness
This paper introduces a stiffness coefficient H = fabric stiffness/GSM to reveal the connotative relationships of whether a fabric was easy to arch and to be caught or not. In theory, a larger 
Putting the experimental results of Table 4 into equation (1), the relationships between the stiffness coefficient
Relationship between
Friction factor
According to the mechanical analysis above, when the static friction force
In theory, it can be inferred that when
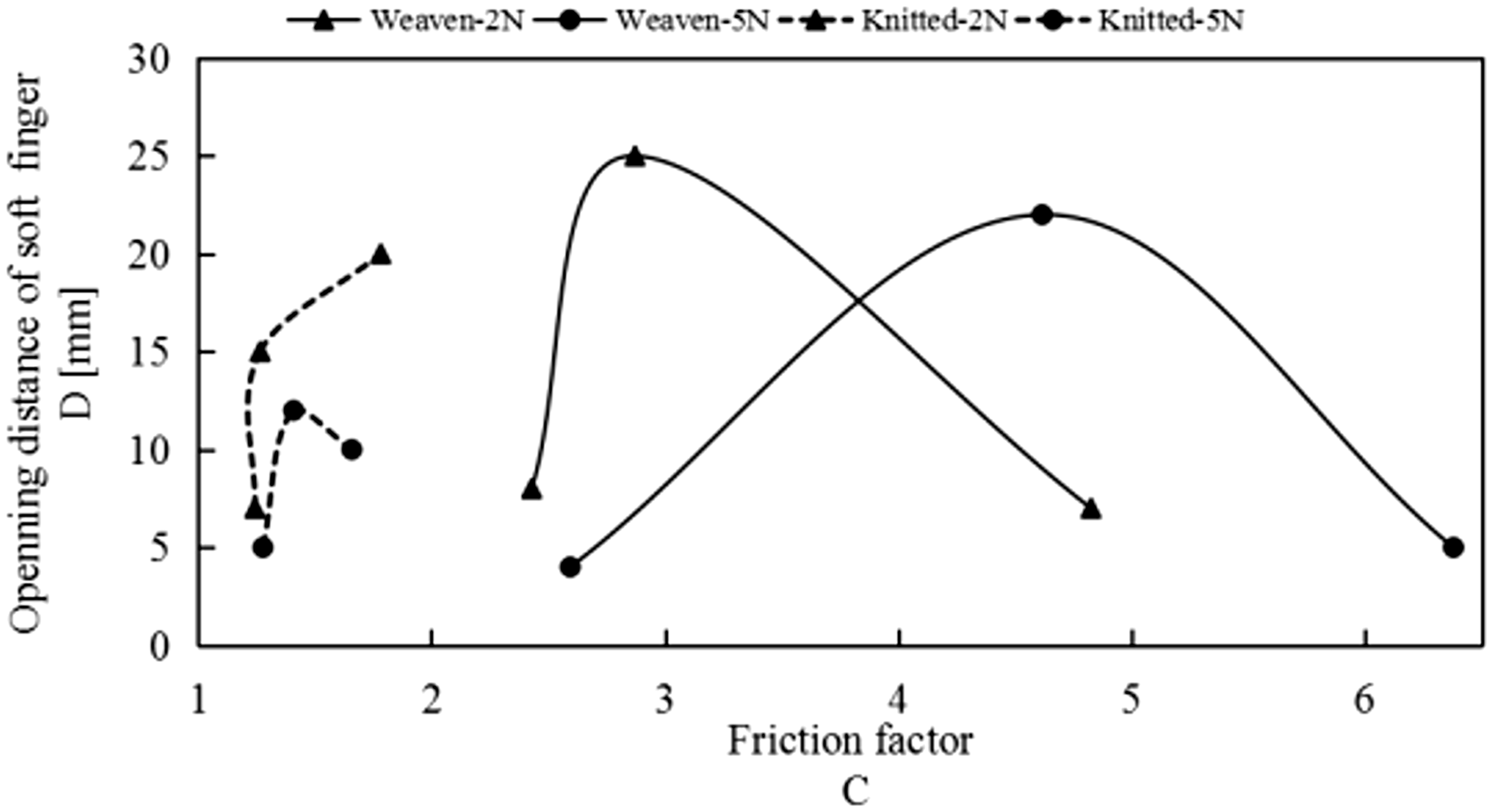
However, the relationships from our experiments showed a disparity with the theoretical deduction as shown in Figure 16. The results showed that when the pressure on the cutting piece is 2 N, with the increase of the friction factor value (knitted: from 1 to 2; woven: from 2 to 2.87), the soft finger opening distance shows an increasing trend, which means that the fabric is more difficult to be grasped. When the friction factor exceeds a certain range (knitted: >2; woven: >2.87), the fabric is more difficult to be grasped. At pressure 5 N, with the increase of the friction factor value (knitted: from 1 to 1.4; woven: from 2 to 4.6), the soft finger opening distance shows an increasing trend, which means the fabric is more difficult to be grasped. When the friction factor exceeds a certain point (knitted: >1.4; woven: >4.6), the fabric becomes more difficult to be grasped. It can be seen that whether the structure of the fabric is knitted or woven, when C becomes greater, the D shows a trend of increasing firstly and decreasing subsequently, which means an inflection point there.
Relationship between
The parts of positive correlations are out of our expectation. We tried to explore the exact reason for the difference, but found it may be a rather complicated issue, possibly related to the fibers, yarns and contextures, or even temperature and humidity. So, we decided to put it aside temporarily and to study it in the future for its complicacy.
Grasping model
To sum up, in order to clarify the relationships among the above four influencing factors, and to synthetically show the property of cutting pieces that are easy to be grasped, we tentatively propose the following relational model. Let 
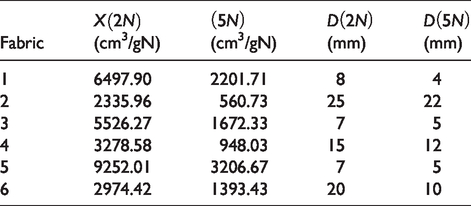
The items in Table 4 can be brought into equation (2). The grasping coefficient values of the six fabrics are shown in Table 5. The
Grasping coefficient and opening distance of soft finger
Relationship between
There is a distinct relationship between the grasping coefficient X and the opening distance of the soft finger D. Whether knitted or woven, a fabric has a bigger grasping coefficient
Fitting results.
When the positive pressure of the soft finger is 2 N or 5 N, the relationships between the opening distance and the grasping coefficient are shown as follows


The coefficient of determination
Validation tests
In order to verify the reliability and applicability of the grasping model proposed in this study, we conducted a test experiment on two kinds of fabric (Figure 19). Fabric #1 is the hat piece of a hoodie jersey with knitted contexture, and fabric #2 is a colored woven fabric which is a cuff piece of a shirt; #1 weighs 272.8 g/m2 and #2 weighs 200 g/m2. According to equations (3) and (4), the critical soft finger opening distance D is calculated respectively when the positive pressures of soft finger are 2 N and 5 N, respectively. The grasping coefficient and the opening distance of the soft finger are shown in Table 6. When the pressure of the soft finger is 2 N, the piece #1 needs to be grasped by a soft finger with an opening distance of 24 mm, and 8 mm for #2. When the pressure of the soft finger is 5 N, #1 needs an opening distance of 15 mm, and #2 needs 5 mm. Figure 20 shows the grasping effect.

Cutting pieces for test experiment.
Grasping coefficient and opening distance of soft finger for two test fabrics

Grasping effect in test experiment.
It can be seen that all the pieces can be grasped and separated well. So, the grasping model of pattern pieces of garment using robotic soft fingers in this paper has a good applicability.
Conclusions
This paper summarized the ways to separate the pieces from a cutting pile by automatic grasping methods and analyzed the principles of grasping by different studies. The force analysis of the grasping shows that the parameters of a soft finger (positive pressure, opening distance) and the parameters of the fabric (GSM, thickness, friction coefficient, stiffness) have a great influence on their effects.
A grasping experiment was carried out according to the analysis, and the conclusions are as follows:
Under the same positive pressure of soft fingers, the cutting pieces with a bigger thickness change rate are more difficult to grasp. A new stiffness coefficient Whether a knitted or woven fabric, when the friction factor C becomes greater, the opening distance D shows a trend of increasing firstly and decreasing subsequently. The part of negative correlation fits the principle of a common physical sense well, whereas the parts of positive correlations are out of expectation and need to be studied particularly in the future. When the positive pressure of the soft finger increases, the opening distance of the soft finger becomes smaller, indicating that the cutting piece can be grasped more easily. When the grasping coefficient
This paper studied merely a situation of grasping and lifting a piece by a single soft finger, and did not consider the shape or weight of a piece and subsequently the number of soft fingers required to lift a piece under a flat condition. Therefore, we will focus on the arrangement of multiple soft fingers to guarantee the grasping and eventual moving of a fabric piece in a flat condition.
In future research, we will choose different fabrics with different materials, yarns, contextures, and so on, and will discuss the influence of them on the grasping effect, so as to make our grasping model more accurate and applicable.
The achievements in this paper and the future research is expected to apply to intelligent production of clothing, especially intelligent stacking processing, intelligent transportation of semi-finished clothing, and intelligent packaging of garment finished products, amongst others, to promote the clothing industry to a level of Industry 4.0.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.