
Abstract
The aim of this study was to develop suits for upper-body wearable robots that can satisfy the needs of industrial workers. Firstly, a preference survey was conducted to understand the workers’ preferences in terms of design and functions. Secondly, designs were developed and prototyped after performance tests of the materials used, including washing dimension-change rates and resilience for the stability of sensors and actuators. Thirdly, a satisfaction survey was conducted to evaluate the developed designs. The major results were as follows: (a) the most preferred function was assisting movements while lifting heavy objects or patients from the floor or at lower levels below the waist; (b) the preferred design features included waist-length shirts without collars, a style that can be worn outside, black or blue designs, wicking fabrics, and flexible materials; (c) four designs were developed and prototyped after confirming the fabric and clothing performance tests; (d) upon evaluating design and function satisfaction, more than 73% of participants were satisfied with the four designs, and 85% wanted to wear them. Design D was the most satisfactory in terms of material mapping details (featuring seams along muscular body lines and added three-dimensional (3D) patterns on the elbows). Design B was the most satisfactory regarding purchase and use/wearing. This was the design with tapered lines for raglan sleeves and horizontally cut lines on the shoulders. Participants expected Design C, with seams along muscular body lines and 3D patterns on the elbows, to easily suit patients and nurses. This research will be helpful when developing suits for upper-body movement-assistive wearable robots.
Keywords
The wearable robot market is expected to increase at a compound annual growth rate (CAGR) of 43.48% from 2018 to 2028. This statistic includes the America and Asia-Pacific regions. 1 Among the various purposes of wearable robots, such as assisting movements, entertaining, training, and military use, this research is focused on wearable robots for industrial workers. Industrial workers are exposed to risk of musculoskeletal diseases and disorders due to heavy-duty and overloaded repetitive tasks, which can cause occupational musculoskeletal injuries. For example, the number of occupational diseases increased from about 7800 in 2010 to about 11,400 in 2018 in South Korea, and the number of musculoskeletal diseases developed at work increased 28.95% from 2010 to 2020. 2 The highest incidence of musculoskeletal diseases was by overloaded motions and repetitive tasks. 3 Carrying or installing heavy loads and the repetition of such physical burdens can cause industrial workers to reach physical limits, resulting in injuries.
Nurses faced 18,090 cases of musculoskeletal disorders in 2017,4 over half of which involved back injuries.5 Work-related disease site surveys showed that 24% of approximately 50,000 people have upper limb muscle pain and 11.5% have back pain. 6 Similarly, workers mostly had back pain (23.6%), followed by pain in the hand/finger/wrist (22.1%), shoulders (21.4%), and arms/elbows (15.7%). 7 Thus, development of upper-body wearable robots for physical labor-intensive workers is required, 8 which is expected to prevent injuries and even increase work efficiency.
Due to the accelerating trend of aging worldwide, the number of workers in industrial sites is gradually decreasing. The development of wearable robots that can strengthen physical capabilities and allow the body to move freely is necessary to achieve efficiency with limited manpower. 9 The online shopping market has also recently rapidly grown due to COVID-19, and discussions have been held on overworking couriers. In addition, due to the surge in the number of patients and the increase in the amount of waste due to disposables, the workloads of nurses and street cleaners are increasing, and manpower shortages are occurring in these areas as well. These occupational groups, whose work involves carrying heavy objects or patients repeatedly, can have many musculoskeletal diseases. Thus, it is necessary to develop wearable robots that can enhance physical capabilities and prevent musculoskeletal injuries while being comfortable to wear, like clothes, for workers at these industrial sites.
Many previous studies have focused on developing exoskeletons or exo-suits with stiff and bulky materials that can provide powerful assistance; however, those types of suits limited the wearer’s movements, providing uncomfortable experiences and consuming great amounts of power. Thus, more recent research leans toward developing soft wearable robots, even clothing-type robotics, for comfort during frequent and long-duration wearing. To achieve this, it is necessary to understand the requirements for developing clothing-type robotics, which can be called “wearable robot suits,” but there is lack of this kind of research. Understanding target users in the early stage of the development process is also necessary for marketplace success,10–12 but there is currently a lack of effort in this regard.
Thus, the aim of this study was to develop designs and prototypes of suits for wearable robots to assist with upper-body movements when industrial workers lift heavy loads or patients. The suits are developed reflecting user preferences and consider important design requirements and evaluating performances through internationally standardized tests. The results of this study are expected to be beneficial for developers when researching and developing clothing-type wearable robots.
Literature review
Function
Main function
Wearable robots for industrial workers can be worn to assist movements by supporting muscular strength and supporting standing posture. They can help relieve pain and prevent accidents.13–15 Clothing-type wearable robots have the advantage of maintaining physical freedom and delivering power, being lightweight and capable of small-scale development compared with exoskeleton robots, but they require complementary support and strength assistance. 16
Targeted motions
The main working motions of workers can be divided into lifting heavy objects or patients from the floor or at lower levels below the waist or from overhead; pushing or pulling aside heavy objects or patients; raising one’s arms over the head for long periods of time; repeatedly flexing and opening one’s elbows; bending the waist at angles greater than 45 degrees; and leaning backward or with weight over one’s side.17–20
Design
The considerable design elements of wearable robots are type, details including length and collar, color/pattern, fabric/material, and fit/size. 21
Type
The types of clothing for workers could include uniforms, outdoor/sportswear, daily fashion, or protective accessories.
19
Length
It is suggested to make a long rear hemline to allow comfortable movements.23,24
Color/pattern
Colors of work clothes should be selected considering factors of pollution, such as dust at work sites. 19
Fabric/material
Clothing-type wearable robots should be able to support the working posture in any necessary situations. These types of wearable robots are made with flexible materials, such as fabrics for comfort, like everyday clothes.
16
When developing muscle-strength-assistive clothing, materials can be divided into three categories based on use: large areas of exercise, areas of stability, and areas that require ventilation of sweat zones.
25
For the large areas of exercise consisting of joints with high angles of movement, flexible, stretchy materials with high levels of polyurethane (PU) are recommended.
24
Sweating zones
Fabric mapping that applies different fabrics to different body parts is also suggested. Mesh fabrics can help ventilation23,24,26,27 and these can be applied to sweating zones.
Easily contaminated areas
Areas such as buttons and zippers are easily contaminated, and anti-stain materials or finishes are suggested in these areas.
26
Fastener
A front zipper is recommended for ease of dressing and taking off. 27
Wearing method
An untucked design can be comfortable. 30
Fit/size
There are existing size standards for men’s and women’s work uniforms.31,32 These size guidelines could be used when developing clothing platforms. It is necessary that the design be socially acceptable and not burdensome, because such workers frequently interact with people. However, there are still difficulties commercializing wearable robots due to a lack of reflection of users’ preferences and usage understanding. As the industry is developing and people’s quality of life is increasing, the importance of design aspects for work clothes is increasing, as well as the function. 8
Important aspects
Wearability
Seams should be placed in areas that do not interfere with movement and they can be curved along the human body line.
24
Seam types also affect wearing comfort: to prevent local pressure between the human body and clothing due to seam lines,
24
a flatlock stitch is recommended to enhance comfort and mobility with minimal seam margins. This will also prevent the seams leaving any marks on the body.
33
Seams can affect strength and elasticity, which in turn can affect wearability.
34
Ergonomic body lines, such as oblique lumbar cutting lines, should be considered for wearability, along with three-dimensional (3D) elbow patterns.
25
Stability
Accurately sensing the wearer’s movements and delivering power to targeted muscles is critical to operate wearable robots. Sensors and actuators should be fixed in constant positions on a suit. After multiple washes and wears, if the suit changes or becomes distorted, the sensors and actuators would work on unintended areas. There is no standard for wearable robotic suits, but the quality standards of fabrics for work clothing 36 and for overall clothing 37 allow washing dimension-change rates from ±3–6%,36–38 and a resilience of 60–100%.39,40
Durability
Unlike everyday clothes, work clothes can be easily damaged by wearing them for a long period of time every day, usually on sleeves (17.4%), cuffs (15.5%), and pockets (12.1%); thus, durable materials in these areas are suggested. 26 The suits for wearable robots should be washable and should be made from fabrics that can be easily worn due to the frequent movements. There is no standard for suits for wearable robots but according to quality standards for work clothes 36 and for everyday clothes, 37 fabrics should have pilling above grades 3–4, colorfastness after washing above grades 3–4, and color fastness after friction above grades 3–4.36–38
Methods
The first survey: preferences in functions and designs
To analyze the status of work clothes and work environments, as well as industrial workers’ preferences in functions and designs, face-to-face interview surveys were conducted after receiving institutional review board (IRB) approval. The participants were randomly sampled among adult male and female industrial workers, and they received about US$100 monetary compensation. The total number of participants was 60, consisting of 20 couriers, 20 street cleaners, and 20 nurses, all of whom repeatedly lift heavy loads or patients. The questionnaire consisted of demographic background, work environments and work clothes, functional and design preferences in clothing-type wearable robots, important aspects to consider, and use/wear intention. There were 26 questions, borrowed from the previous research, consisting of four questions on demographic background, 27 nine questions on work environments and work clothes,14,19,27,42–46 and 11 questions on function and design preferences in suits for wearable robots,14,19,20,22,44–47 important aspects to consider,20,22,42,48 and use/wear intention. 46
The questions about participants’ demographic backgrounds consisted of multiple choice and open-ended questions, and the questions about work environments and work clothes were multiple choice, open-ended, and five-point Likert-scale (1 = never, 5 = very frequent) questions. The questions about function and design preferences in suits for wearable robots consisted of multiple choice and open-ended questions, and the questions for the important aspects to consider were answered on a five-point Likert scale (1 = very unimportant, 5 = very important). Reliability analysis with the value of Cronbach’s alpha was conducted and the Cronbach’s alpha values were from .88 to .98 or higher, indicating high internal consistency. 49 The collected data were analyzed using SPSS 25.0 software to conduct technical analyses such as frequency and percentage, as well as to perform t-tests and Welch’s analysis of variance (ANOVA) with Scheffé ad hoc tests to investigate differences among people with different demographic backgrounds.
Design and prototype development and evaluation
Based on the first survey results and literature reviews, design guidelines for suits for wearable robots were suggested. The sensors and actuators that are planned to be embedded into developed suits were the following: stretchy strain sensors were printed in Ag ink on a stretchy fabric and coated with silicone. These sensors were 30 mm long and 5 mm wide. The electronic compression actuators were made of polyimide, conductive adhesive, and polyethylene terephthalate (PET) film layers. The actuator film weighs less than 2 g. To meet stability and durability requirements, more than 70 swatches of stretchy and wicking fabrics suitable for T-shirt outer items were collected, and four experts in the clothing and textiles industry helped select 11 fabrics. These 11 fabrics were tested for property (ISO 1833/5088), mass (ISO 3801), tensile strength (ISO 2062), dimension-change rates after washing (ISO 5077/6330), and resilience (ASTM D3107). Based on the results, the superior three fabrics were selected for the prototypes. Their adaptability was confirmed with additional tests for thickness (ASTM D1777), colorfastness after washing (ISO 105-C06), colorfastness after rubbing (ISO 105-X12), pilling (ISO 12945-1), and seam tensile properties (ISO 13935-2). Based on the design guidelines and the fabric performance test results, four designs and prototypes were developed to compare and choose the best design options. We tested the prototypes for stability and durability, including washing dimension-change rates (ISO 6330), which could be difficult for participants to evaluate.
The second survey: design evaluation and satisfaction
The survey of design evaluation and satisfaction was conducted through face-to-face interview surveys in South Korea, one of the markets for wearable robots. The participants could touch and wear the four developed suit prototypes to answer the questions. 50 The participants were the same adult male and female industrial workers who participated in the first survey, and they received about US$100 monetary compensation. A total of 60 people were selected through random extraction, including 20 couriers, 20 street cleaners, and 20 nurses, who repeatedly lift heavy loads or patients. The survey involved 22 questions, including seven questions about demographic background (gender, age, residence, health status, occupation, height, weight), 13 questions about function and design satisfaction for the developed clothing-type wearable robots, two questions about purchasing and use/wear intentions, and a question of open-ended suggestions.
The demographic background questions consisted of multiple choice and open-ended questions, and the questions about design evaluation and satisfaction and purchase and use/wear intentions were answered on a seven-point Likert scale (1 = very dissatisfied, 7 = very satisfied) for more in-depth investigation on how much people are satisfied with the developed designs and their differences. Reliability analysis with the value of Cronbach’s alpha was conducted to examine internal consistency of the questionnaire. The value of Cronbach’s alpha was .96, with a very high reliability of .8 or higher. 49 The collected data were analyzed with technical analyses, t-tests, and an ANOVA with Scheffé’s ad hoc tests using SPSS 25.0 software.
Results and discussion
The first Survey results: preferences in functions and designs
Demographic characteristics
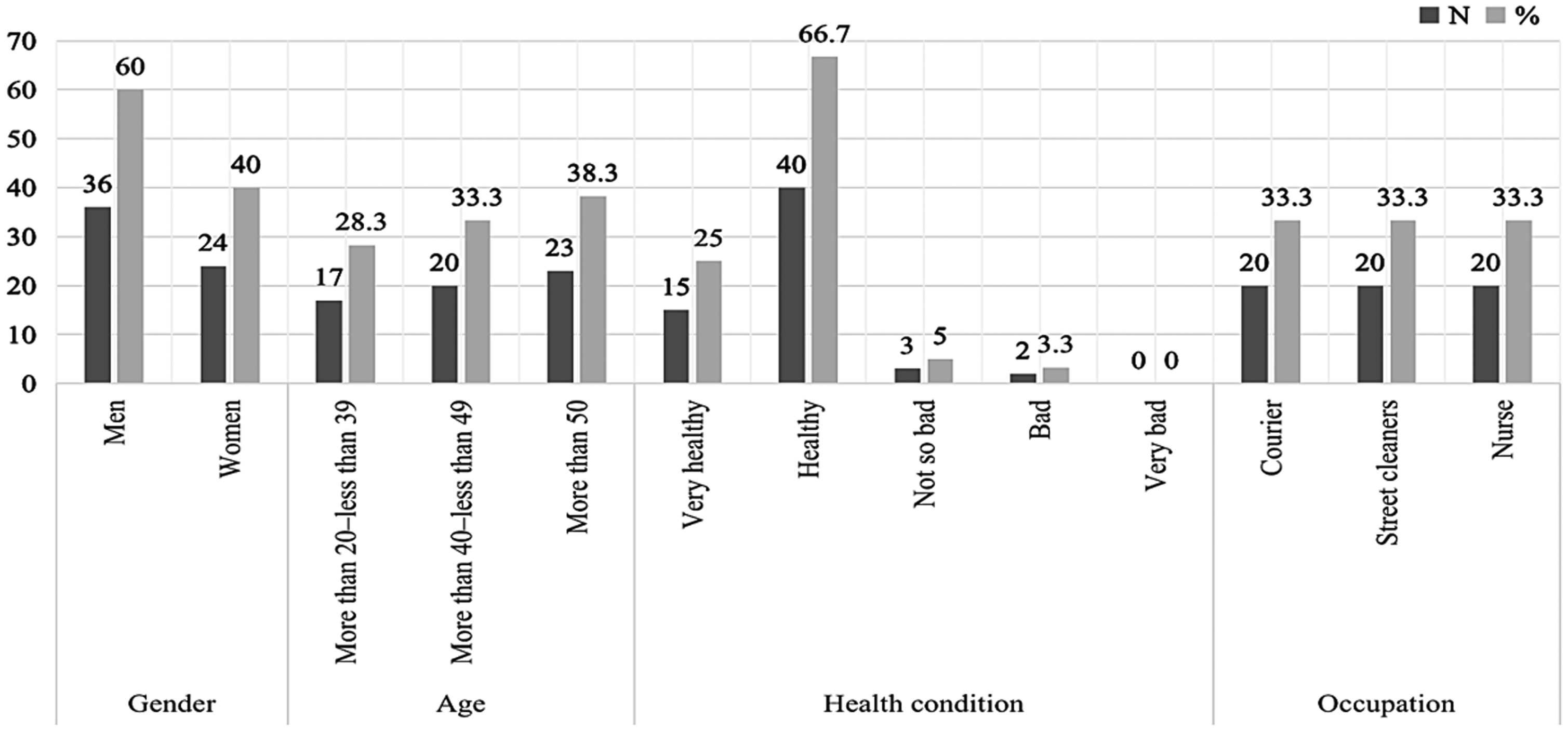
Participants consisted of 36 males (60.00%) and 24 females (40.00%), and the average age was 46 years (standard deviation [SD] = 10.93, range [R] = 23–68) (Figure 1). The age group was approximately evenly distributed (±5.00%), but there were slightly more people older than 50 (+5–10%). More than 90% of participants considered themselves healthy. Regarding occupation, composition was equal, with 20 couriers (33.30%) and 20 street cleaners (33.30%), and more than half of the respondents answered that they were healthy (n = 40, 66.70%).
Work environment and work clothes
The survey showed that people mostly worked eight hours per day (43.30%) followed by nine hours (n = 12, 20.00%), and couriers even worked up to 15 hours a day (n = 2, 3.30%). During the working time, the most sweating upper-body areas were the back and armpits (n = 20, 33.30% each), followed by the shoulders (n = 22, 36.70%) and waist (n = 11, 18.30%). The cases of musculoskeletal diseases caused by tasks with many repetitive motions or overloaded with excessive force frequently occurred in the shoulders (36.70%) and waist (18.30%). This result is similar to previous research indicating that such cases occurred in the shoulders and waist (35.7%). 18 Thus, it is recommended for wearable robots to assist movements of the shoulders and waist.
About 93% of participants wore uniforms for work, with most being large size (n = 34, 56.70%), followed by medium (n = 18, 30.00%). Some 77.8% (n = 28) of men wore large size and 50% (n = 12) of women wore medium size. The areas where the work clothes were easily worn out were the abdomen (n = 18, 30.00%) and the front opening (n = 10, 16.70%), such as buttons and zippers, and easily stained areas were the cuffs (n = 10, 16.7%) and the front opening (n = 28, 46.70%). Thus, it is suggested to use durable and anti-stain fabrics for these areas. The number of times work clothes were washed per week was three times (n = 19, 31.70%) and twice (n = 16, 26.70%). Industrial workers can sweat a lot and are often exposed to pollution,19–27 so it is recommended to use materials that dry quickly after washing and maintain functions after repeated washing.
The most frequently performed motions at work were bending at the waist by more than 45 degrees (M = 3.97, SD = 1.09), bending elbows repeatedly (M = 3.93, SD = 1.25), and lifting heavy objects or patients from the floor or at lower levels below the waist (M = 3.67, SD = 1.13). These motions can cause musculoskeletal diseases. 20 Furthermore, the back of the clothing should be designed to be longer than the front to facilitate bending of the back and arms, or a flexible material with a high PU content should be used for elbows to allow greater angles of movement. 24
Design preferences, considered aspects, and use/wear intention
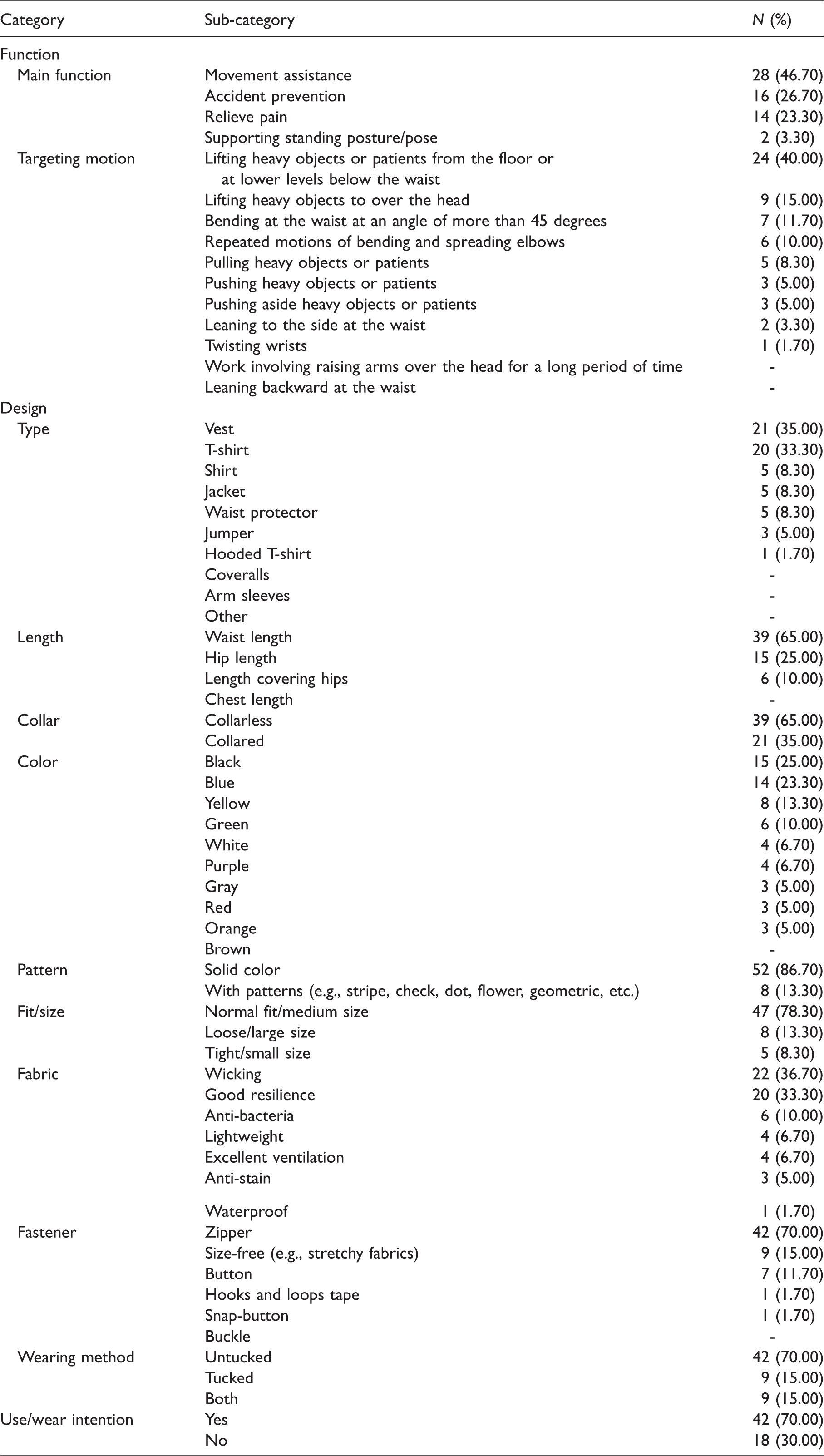
The most preferred function of clothing-type wearable robots was assisting movements (n = 28, 46.70%), and the preferred targeting motions were lifting heavy objects or patients from the floor or at lower levels below the waist (n = 24, 40.00%) (Table 1). The preferred design features were waist-length shirts (n = 21, 35%) or T-shirts (n = 20, 33.30%), collar free (n = 39, 65.00%), in black (n = 15, 25.00%) or blue (n = 14, 23.3%) with no patterns (n = 14, 230.7%). Zippers (n = 42, 70.00%) were the most preferred fastener, which is consistent with Jang’s research. 43 For the wearing method, they preferred a top that can be worn untucked (n = 42, 70.00%), with a moderately relaxed fit (n = 47, 78.30%), and wicking (n = 22, 36.70%) and flexible (n = 20, 33.30%) fabrics. The most important aspects to consider for working clothes were wearability (M = 4.87, SD = 0.43) followed by mobility (M = 4.77, SD = 0.56). For the question of intended use, more than 70% of participants responded that they would use clothing-type wearable robots for muscle support when working.
Function and design preferences and use/wear intention
T-tests and ANOVA results
The t-tests and ANOVA results showed that there are significant differences in important aspects to consider and use/wear intentions of clothing-type wearable robots among people of different occupations and genders, but there was no difference among people of different ages and health conditions. Overall, the frequency of each working motion from most to least was in the order of couriers, street cleaners, and nurses (Table 2). It seems that couriers use excessive force due to heavy weight handling when doing diverse tasks, such as collecting parcels, classification work, and transportation operations, so they have the highest frequency of each working motion.55 The higher the frequency of each working motion and the physical burden on the occupation, the more the incidence of musculoskeletal diseases is expected to increase. 22 Men (M = 4.94, SD = 0.23) considered wearability to be more important than women did (M = 4.75, SD = 0.61) (t = 1.496, p = .001), and men had more intentions to use/wear clothing-type wearable robots for strength support (t = 1.562, p < .01). Eom 22 found that people avoid wearing conventional work clothes because they are uncomfortable, which can decrease work efficiency. Therefore, modifications should be made, such as reducing the burden by wearing lightweight work clothes.
Differences in working motions among people with different occupations and genders
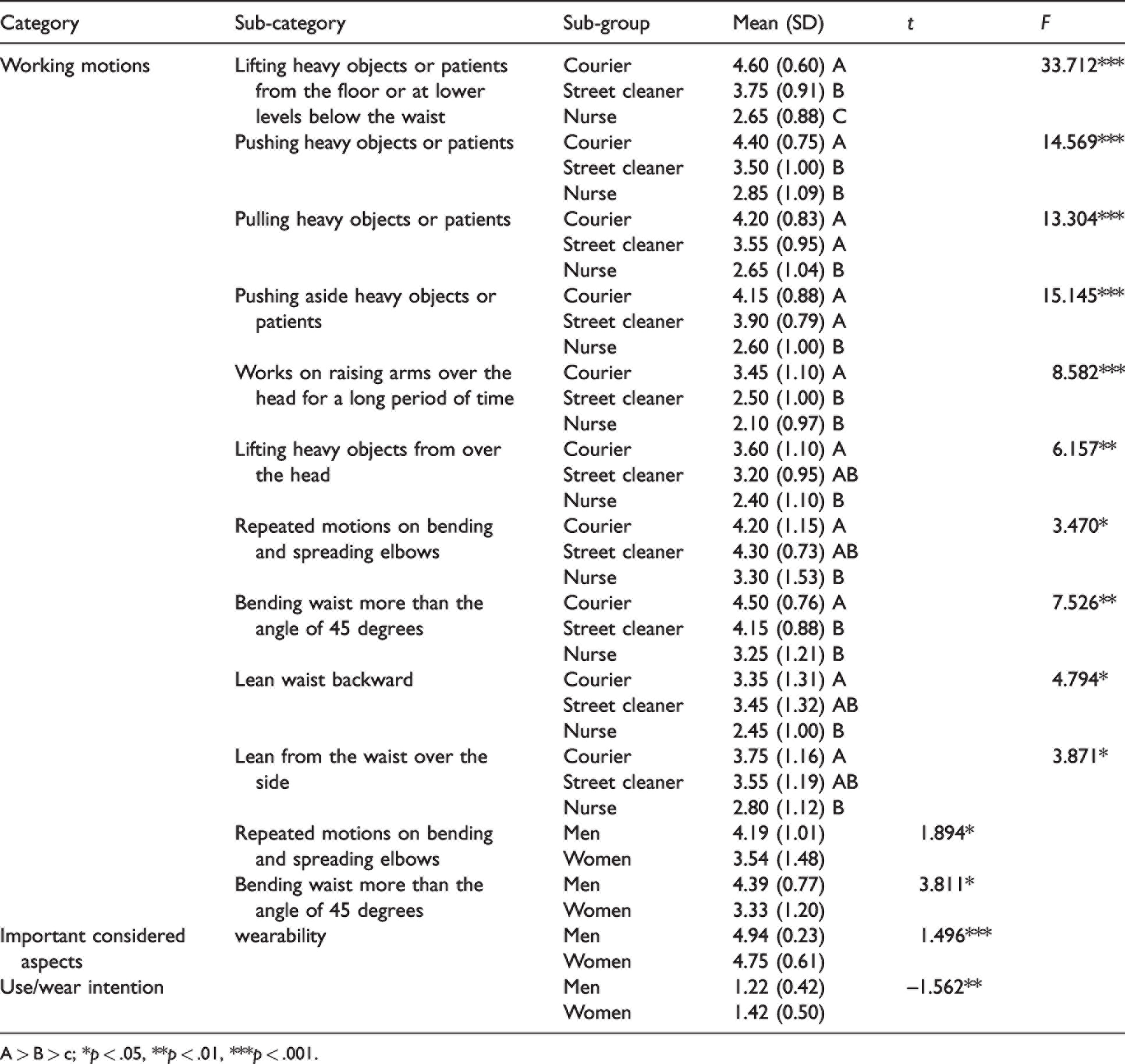
A > B > c; *p < .05, **p < .01, ***p < .001.
Design and prototype development and evaluation
Based on the results of the first survey and literature reviews, design guidelines were defined for suits of wearable robots to assist with muscle strength of the upper body (Table 3).
Design guidelines for suits for upper-body movement-assistive wearable robots
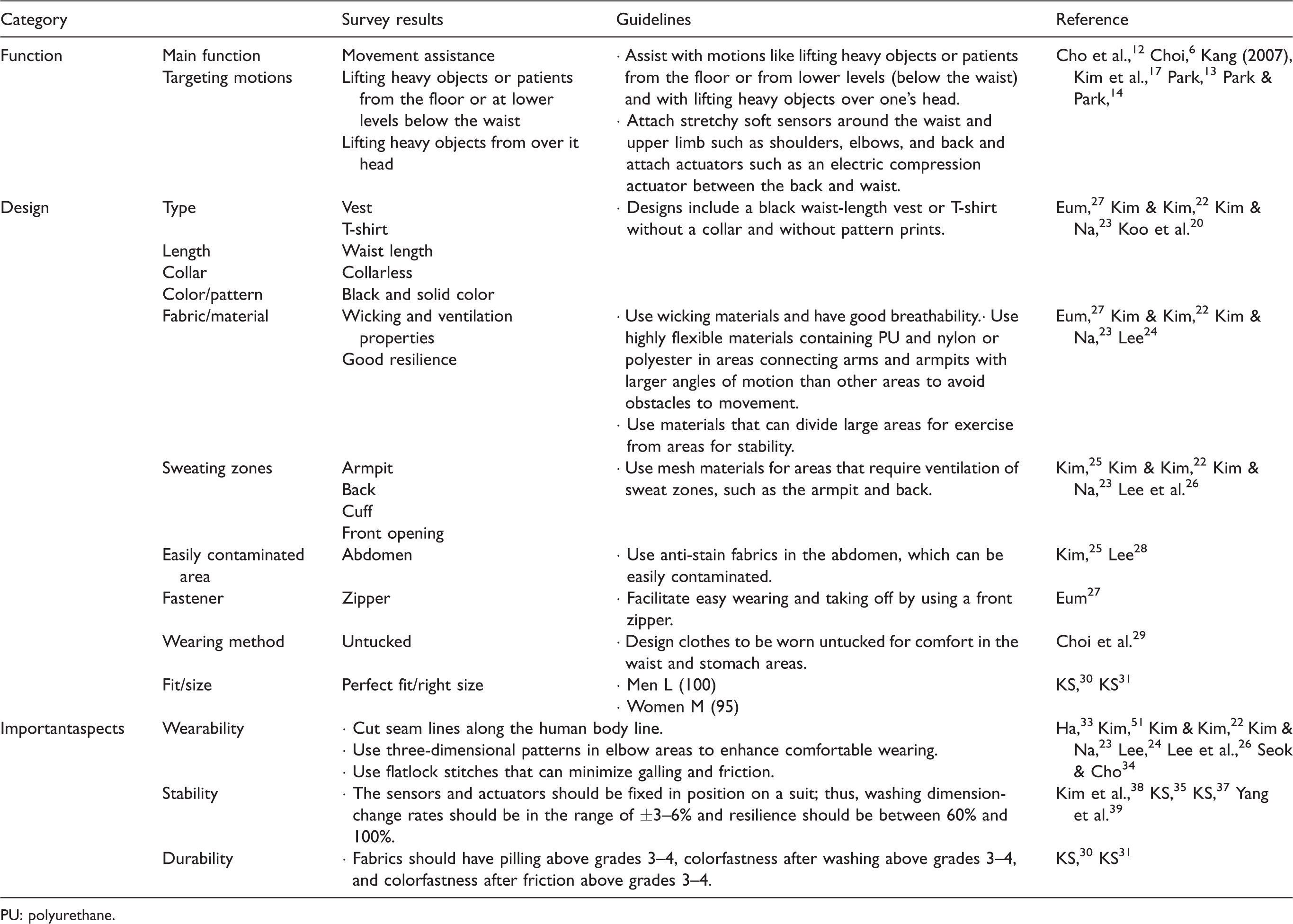
PU: polyurethane.
Based on the design guidelines, designs were developed and prototyped (Table 4). The prototype’s common design features were as follows: (a) stretchy soft strain sensors attach near the joints of the shoulders, elbows, and back to monitor upper-body movements and electric compression actuators between the back and waist for support; and (b) a black waist-length T-shirt with a front zipper and without a collar or prints. The back is longer than the front, so it can be worn untucked. To apply sensors on the upper limbs, a T-shirt type was selected instead of a vest type. The prototype’s size was a men’s large, following standard sizes for male adult garments (KS K 0050). 30 In addition, (c) the fabrics used were a PU-integrated stretchy fabric (e.g., at the shoulder, elbow, chest, abdomen, and back), a mesh fabric for sweat zones (e.g., armpits, sides, and back), durable thicker fabrics (e.g., abdomen, front opening, and cuff), and anti-stain fabrics (e.g., abdomen, cuff, and front opening); (d) flatlock seams that do not leave any marks after a long time being worn and reduce friction with the skin to enhance the fit 33 were applied.
Developed designs of A, B, C and D

Besides the common characteristics, the designs had different seam line cuts to determine whether seams can affect important aspects, including wearability, stability, and durability. Thus, different seam lines were applied to the designs: (a) Design A was a basic zip-up T-shirt with a set-in sleeve to compare with other designs; (b) Design B applied taping cutting lines for raglan sleeves and horizontal cutting lines on the shoulder; and (c) Designs C and D applied seam lines along muscular body lines and added 3D patterns on the elbows. Design C avoided the shoulder blades, had oblique lumbar cutting lines with wide side panels, and had horizontal cutting lines on the shoulder. Finally, (d) Design D had a wider front and back abdomen panel and vertically cut seam lines on the shoulders.
Fabric swatches for tops containing PU for stretchiness and nylon or polyester for wicking were collected. After screening for texture and color with four clothing and textile experts who have studied and developed platforms for wearable robots, 11 fabrics were selected as candidates (Table 5). In addition to the properties and mass of the fabrics, two more important aspects (resilience and washing dimension-change rates) for wearable robots with stretchy fabrics were tested to check for any changes after use and care, because the seam lines, sensors, and actuators must be correctly positioned on targeted body areas. Fabrics 2, 8, and 9 were mesh types for ventilation, and the others were knits, including a single and double jersey and a tricot. The test results showed a PU range from 6.1% to 23%, a mass from 160 to 480 g/m2, and washing dimension-change rates from ±0.5% to 2.0%. The quality standards of fabrics for work clothing (KS K 2612:2018) and for overall clothing (KS K 7803:2017) allow mass ranges from 135 to 295 g/m2, washing dimension-change rates from ±3 to 6% (KS, 2018a; 2018b), and a resilience of 60–100%.
39
Performance test results of candidate fabrics
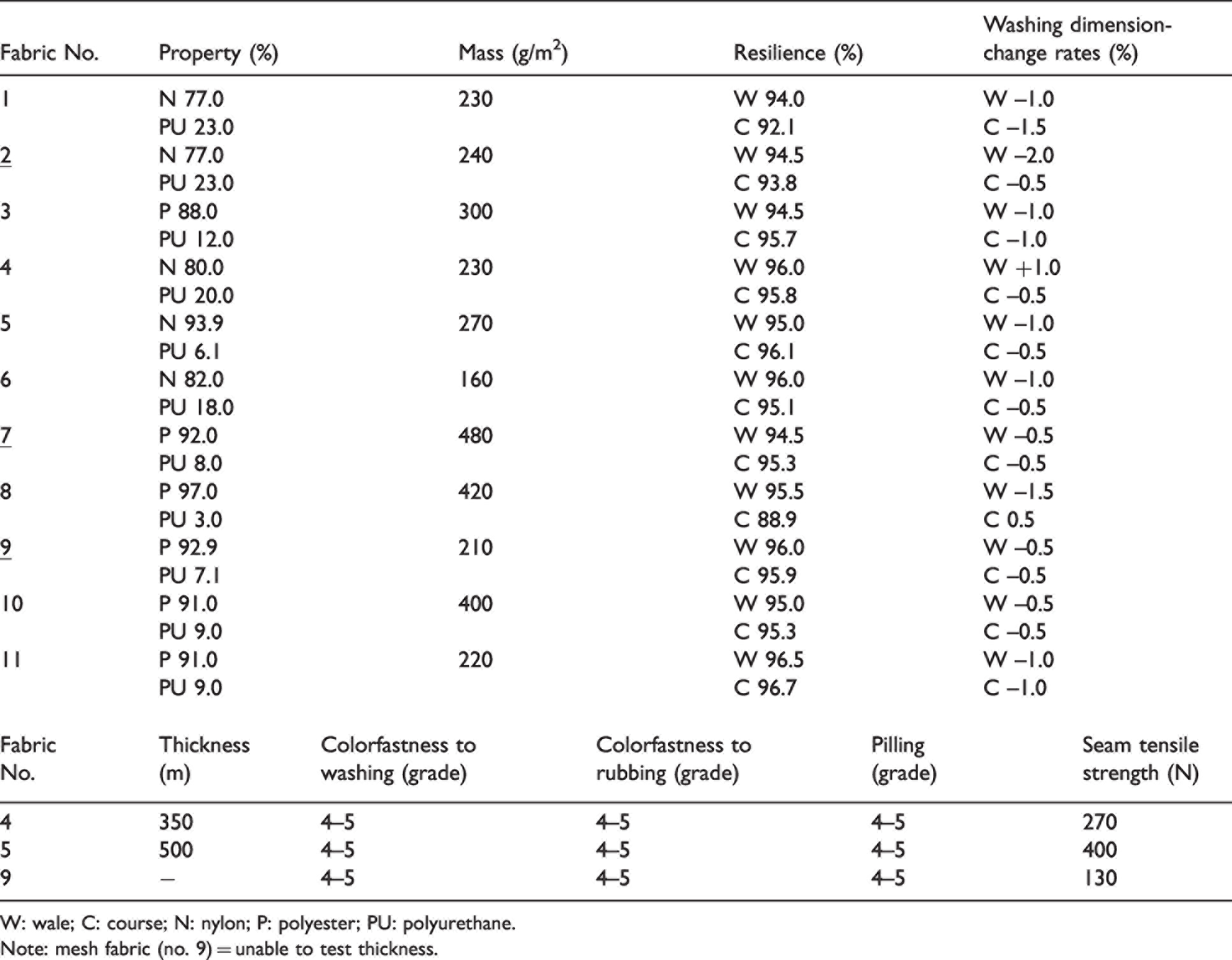
W: wale; C: course; N: nylon; P: polyester; PU: polyurethane.
Note: mesh fabric (no. 9) = unable to test thickness.
To confirm these three fabrics were appropriate for the fabric configuration, the thickness, colorfastness (after washing and rubbing), pilling, and flatlock-seam tensile strengths were tested (Table 5). According to the results, the selected fabrics were all over grades 4–5 in the aspects of colorfastness to washing, colorfastness to rubbing, and pilling. Seam tensile strength tests were conducted to verify the suitability of the fabrics when using flatlock seams, and the best was fabric 5. According to quality standards for work clothes (KS K 2612:2018)
35
and for everyday clothes (KS K 7803:2017),
36
fabrics should have pilling above grades 3–4, colorfastness after washing above grades 3–4, and color fastness after friction above grades 3–4.
35
To confirm the developed prototypes are stable enough after washing to apply sensors and actuators on specific body positions, a series of tests calculated the dimension-change rates after washing (ISO 6330). According to the results, Design A (–0.1 cm) showed the least back length change, followed by Design D (–0.3 cm) (Table 6). The width of the chest was reduced by 0.6 cm in Designs A and D, and in Design C, the sleeve length was increased (+0.3 cm). Therefore, the designs can be modified considering the chest designs of A and D and sleeve design of C to minimize the size changes after washing. The total weight was measured by scales and Design D was the lightest at 243.2 g, followed by Design C (248 g), Design B (249.6 g), and Design A (250.2 g).
Washing dimension-change rate test results of prototypes A, B, C, and D
The second survey results: design evaluation and satisfaction
Demographic characteristics
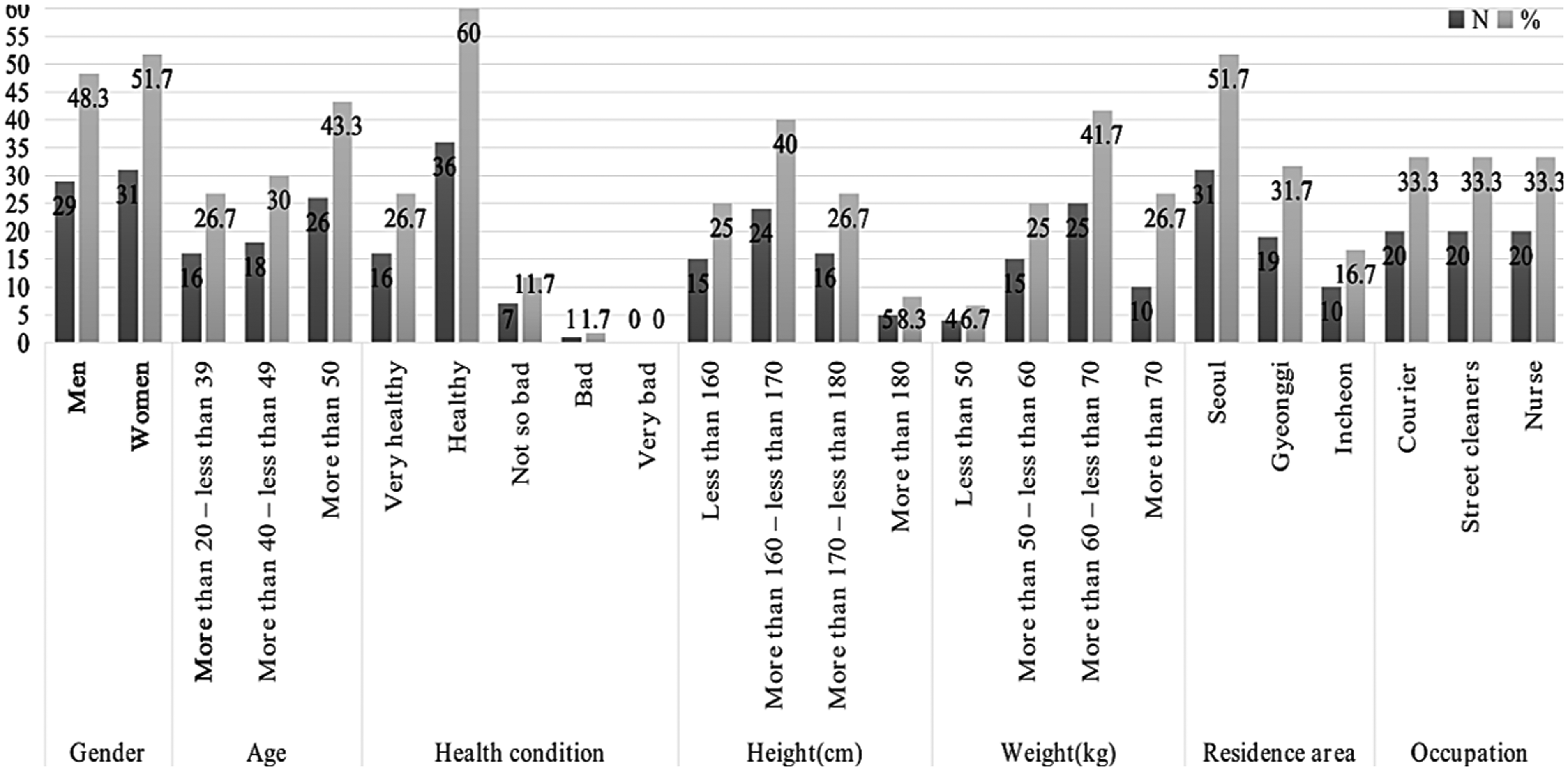
Similar to the first survey, there were 60 participants in the second survey, evenly composed in terms of occupation subgroups of couriers, street cleaners, and nurses (33.30% each). There were 29 males (48.30%) and 31 females (51.70%); the average age was 47.98 (SD = 12.70; R = 23–69) (Figure 2). The average height of participants was 165.75 cm (SD = 8.72, R = 145–187), and the average weight was 64.38 kg (SD = 12.65, R = 43–110). About 60% of participants self-reported that they were healthy (n = 36, 60.00%).
Demographic characteristics.
Demographic characteristics.
Design satisfaction with the developed suits for wearable robots
According to the design satisfaction assessment of the developed suits for wearable robots, all measurement scale averages received higher than 5 out of 7 on the Likert scale. People were overall satisfied with the developed designs, especially the overall design features (M = 5.08–5.48) and wicking fabrics (M = 6.53, SD = 0.87) (Table 7). The next most satisfactory aspects were stretchy materials (M = 6.50, SD = 1.19), durable fabrics (M = 6.42, SD = 0.93), flatlock stitches (M = 6.17, SD = 1.32), and size/fit (M = 6.02, SD = 1.08). According to Jang (2011),19 industrial workers were less satisfied with the material, mobility, and size/fit of work clothes. Thus, it is necessary to map fabrics to different body parts according to the fabric functions and characteristics, as well as use flatlock seams to prevent uncomfortable pressure and minimize friction.
Satisfactions of Designs A, B, C, and D
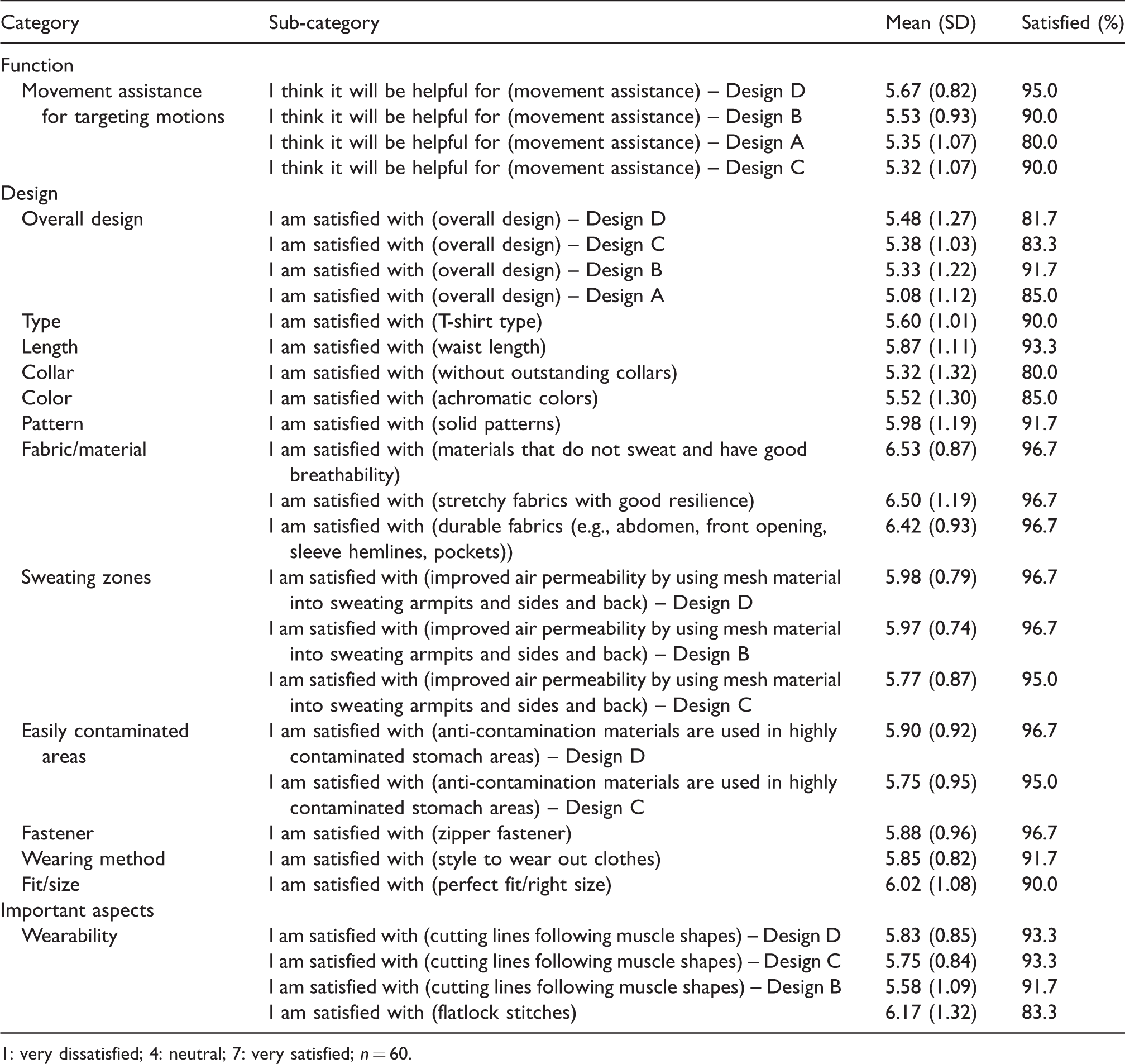
1: very dissatisfied; 4: neutral; 7: very satisfied; n = 60.
About 81% of participants were satisfied with the developed designs, scoring the overall designs over 5 out of a seven-point Likert scale. Among the four designs, Design D received the highest scores (M = 5.48, SD = 1.27, satisfied [S] = 85%), followed by Design C (M = 5.38, SD = 1.03, S = 91.7%), Design B (M = 5.33, SD = 1.22, S = 83.3%), and design A (M = 5.08, SD = 1.12, S = 81.7%), which was the simplest design. Regarding design details, the fabric mapping of Design C (M = 5.68, SD = 1.19) was rated the highest, while Design D was rated the highest for fabric use and seam lines. Design D was the most satisfactory in terms of the seam lines considering muscle movements (M = 5.83, SD = 0.85); use of mesh fabrics for sweaty zones such as armpits, sides, and back areas (M = 5.98, SD = 0.79); and use of anti-stain fabrics (M = 5.90, SD = 0.92) to protect easily contaminated areas. Overall, Design D received the highest satisfaction, which may because of its wearability and mobility, which were enabled by the seam lines being placed on the lower part of the chest to prevent interfering with upper-body movements, making the shoulder lines where sensors are attached fit the armhole lines and inserting vertical seam lines, and making 3D patterns on the elbow area where movements are large to minimize sensor movements.
The results for the function of Design D, which was expected to assist movements, were M = 5.67, SD = 0.82. Design D was designed by reducing unnecessary details and using different materials. The proper placement of functional fabrics is expected to reduce the risk of accidents and relieve pain by assisting with stationary posture and movement due to the low movement of sensors and actuators because of adhesion.
Regarding the use/wear and purchase intentions of the developed clothing-type wearable robots, people rated their willingness to use and wear the four developed designs above the five-point average. More than half of the respondents said that they wanted to purchase Design B (M = 5.37, SD = 1.01), followed by Design C (M = 5.32, SD = 1.07), and regarding the use/wear intentions, Design B (M = 5.45, SD = 1.06) was first, followed by Designs C (M = 5.45, SD = 1.07) and D (M = 5.37, SD = 1.28). For Design B, taping techniques were applied. It appears that the taped area is expected to benefit from improved physical activity by using fabric with a high tensile strength of 80% or more and a lightweight, thin thickness of deformation.
Regarding design and function, Design D for material mapping details was the most satisfactory, and Design B was most satisfactory regarding purchasing and using/wearing. Design D shows high satisfaction due to its horizontal and vertical seam lines, and satisfaction also appears high because it is expected to reduce the risk of accidents by minimizing the movement of sensors and actuators. Regarding taping details, consumers can stabilize their core and prevent injuries by supporting muscles when they wear it. The wearer’s psychological and physical activities objectively show its effectiveness. 51 It may be effective because the intention to purchase and use/wear it is high, because people expect to wear it daily, and because it can improve physical activities.
T-test and ANOVA results
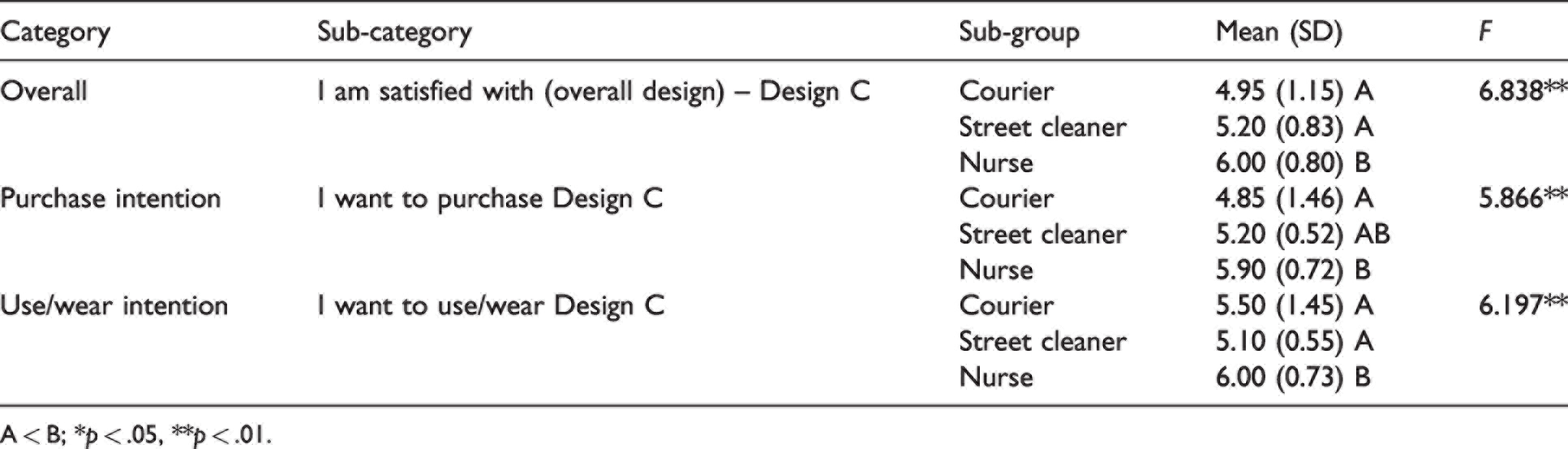
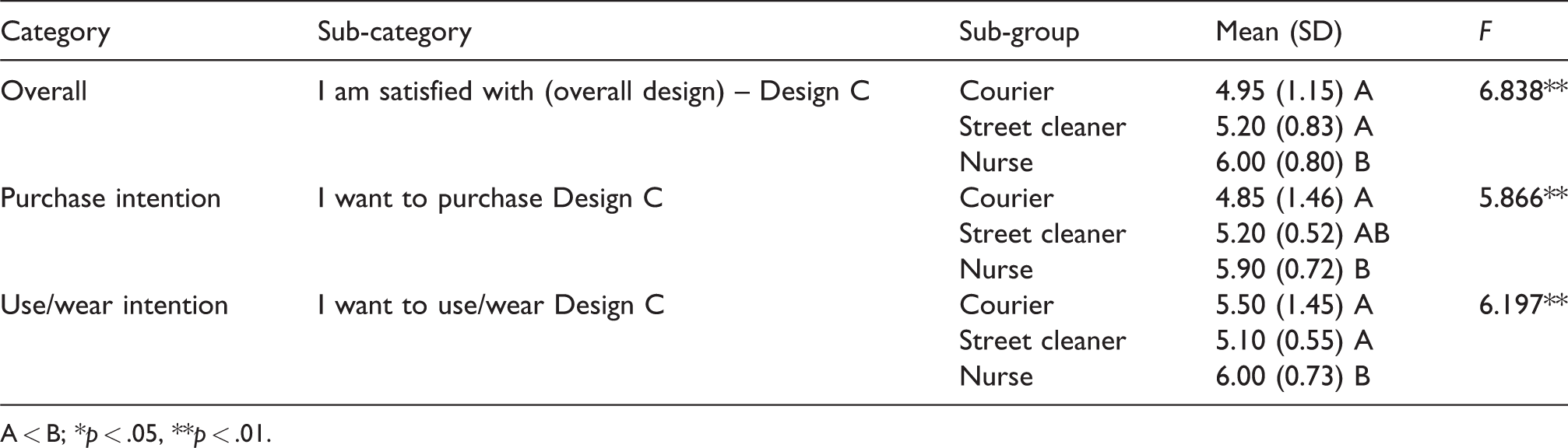
The t-test and ANOVA results showed that there were significant differences in satisfaction and use/wear and purchase intentions for the four developed designs among people with different occupations (.01 < p < .05), but there was no difference depending on age, gender, and health condition. Overall, the frequency of satisfaction and use/wear and purchase intentions were shown highest in the order of nurses, street cleaners, and couriers (Table 8). Nurses’ satisfaction with Designs C and D for material mapping was high, and they wanted to use/wear and purchase Design C. Design C is a material mapping design in which seam lines consider muscle movements of the body, such as the lower chest, back, and diagonal waistlines, and it seems that nurses expected to easily work with patients while wearing this design. Thus, Design C could be developed for nurses. The open-ended suggestions we received for designs and functions were firstly, that for nurses, bright colors such as green, orange, or gray should be used. Patients may not like black or red (n = 3). Some participants suggested adding pockets to nurses’ garments (n = 2). For street cleaners, visibility and safety enhancements could be added (n = 2). For couriers, fabrics with a good texture should be used (n = 2).
Differences in satisfactions among different occupational groups
A < B; *p < .05, **p < .01.
Conclusion
Industrial workers are exposed to the risk of musculoskeletal diseases due to heavy-duty transportation and repetitive work, and the occupational injury of musculoskeletal diseases frequently occurs. Thus, interest in the development of suits for wearable robots that can enhance physical capabilities and prevent musculoskeletal injuries for workers at these industrial sites is increasing. In this study, design guidelines were derived by recognizing existing work clothes and work environments for the development of satisfactory suits for wearable robots for industrial workers, reflecting their preferences. Based on the results, four suits for wearable robots were designed and prototyped. A survey on satisfaction assessment and purchase and use/wear intentions was conducted. The results are expected to provide data for the commercialization of wearable robots that support future industrial workers’ movements.
The main findings are as follows: firstly, the survey of industrial workers’ work environments and work clothes showed that most of them wore uniforms and bent down more than 45 degrees, bent their elbows repeatedly, and lifted heavy objects or patients from the floor or at lower levels below the waist. Secondly, movement assistance was the most preferred function, and lifting heavy objects or patients from the floor or at lower levels below the waist was the motion most desired to be assisted. The preferred designs included a waist-length vest or T-shirt type with zipper openings, without a collar, in black or blue colors, without patterns, made of wicking and flexible fabrics that can be worn outside of the bottom pieces. Thirdly, design guidelines for clothing-type wearable robots were identified and four designs were developed and prototyped considering the design guidelines and performance tests for stability and durability. Fourthly, the satisfaction evaluation showed that all designs were highly satisfactory in terms of design and desire to buy and use/wear. Regarding the overall design satisfaction, Design D with material mapping was rated the highest for the use and configuration of fabric and seam lines. The results of the satisfaction assessment for function indicated that Design D would assist in the stationary posture (M = 5.63, SD = 0.96), motion (M = 5.67, SD = 0.82), pain relief (M = 5.73, SD = 0.84), and injury/accident prevention (M = 5.62). On the other hand, results on use/wear and purchase intentions were high for Design B due to its taping details. Lastly, the t-test and ANOVA results showed significant differences in satisfaction and in use/wear and purchase intentions for the four developed designs among people with different occupations. However, no differences appeared based on age, gender, or health condition. Nurses’ satisfaction with material mapping on Designs C and D was high; they wanted to use/wear and purchase Design C. Overall, Design D was the most preferred for the participants.
The designs were a unisex T-shirt-type, and the developed prototype was prototyped in a size for men, who showed more use/wear intention. There was no difference between genders, but the men’s sizing of the garments might have affected the results. Hence, the designs and prototypes can be developed in diverse types and for women as well in the future. This study also investigated a limited number of participants who were medically classified as healthy; thus, surveys with greater numbers of participants who can prove their medical health status can be conducted in the future. The use of Likert scales of different ranges between the two surveys may affect the results as well. Thus, future studies should use scales with the same point ranges. It would be also meaningful to conduct a wear study with the modified designs from this study. Also, the designs can be more diversely developed to satisfy the needs of different occupations with greater aesthetic needs.
In this study, prototypes were developed to reflect real users’ opinions on the preferred features and designs and the characteristics to be met by the product; the evaluation led to the development of highly satisfactory clothing-type wearable robots. The results of this study are expected to ultimately help improve the working environment by preventing injuries to workers at industrial sites, such as couriers, street cleaners, and nurses, as well as increasing worker efficiency and activity.
Footnotes
Declaration of conflicting interests
The author(s) have no conflicts of interest to declare.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Korean Government-Ministry of Trade, Industry and Energy (No. 20008912, S202005S00045 and S202101S00116).