
Abstract
The saturated tracking control problem is addressed for nonholonomic mobile robots with dynamic feedback in this paper. A finite-time control technique and the virtual-controller-tracked method are adopted in this paper. The main contribution and innovation can be summarized as follows. First, the smooth kinematic tracking controller of Jiang et al. is taken as a virtual control law for the dynamic feedback model. Second, a continuous and bounded dynamic feedback controller is proposed to make the generalized velocity converge to the kinematic (virtual) controller in a finite time for any initial values of tracking errors in the specified attraction region. Third, all of the states of the tracking error system are proved to go to zero as time goes to infinity. In the mean time, the control inputs are bounded by the prespecified bounds at any time. Finally, the simulation results show the effectiveness of the proposed control design approach.
Keywords
Introduction
Owing to Brockett’s theorem (Brockett 1983), it is well known that nonholonomic systems cannot be stabilized to a point with pure smooth (or even continuous) state feedback control, although it is controllable. In order to overcome this difficulty, lots of feedback stabilization approaches have been proposed, which basically can be classified into four cases: continuous time-varying feedback control laws (Murray and Sastry 1993; Teel et al. 1992; Tian and Li 2002); discontinuous feedback control laws (Astolfi 1996; Bloch and Drakunov 1995a; Canudas de Wit and Sordalen 1992); hybrid feedback control laws (Sordalen and Egeland 1995); and optimal control laws (Hussein and Bloch 2008; Qu et al. 2006; Soueres et al. 2001). Recently, adaptive output feedback stabilization for nonholonomic systems with uncertainties or with strong nonlinear drifts were considered by Ju et al. (2009) and Zheng and Wu (2009), respectively, and adaptive stabilization of high-order nonholonomic systems with strong nonlinear drifts has been also studied in Gao et al. (2011).
Another control problem of nonholonomic systems is the trajectory tracking problem. It is not clear that the stabilization methodologies available now may be applied directly to tracking problems for nonholonomic systems, which has aroused the attention from more and more researchers. For example, based on sliding mode control, a discontinuous feedback tracking controller is given for nonholonomic dynamic systems by Bloch and Drakunov (1995b). And a new sliding-mode control method (Chwa 2004) has been obtained for tracking control of nonholonomic wheeled mobile robots in polar coordinates. As for a class of nonholonomic chained form control systems, the tracking problem is addressed by Jiang and Nijmeijer (1999) with a recursive technique. Park et al. (2009) have studied the trajectory tracking problem of nonholonomic wheeled mobile robots with model uncertainties and external disturbances by using adaptive neural sliding mode control, and in Park et al. (2010), the same authors have presented a simple adaptive control approach for trajectory tracking of electrically driven nonholonomic mobile robots with dynamic surface control methodology.
However, neither stabilization problems nor trajectory tracking problems of nonholonomic systems above have a common characteristic: the bounds of control inputs were not considered. From a practical point of view, it is important to design saturated controllers for some nonholonomic mechanical systems. That is because any actuator always has a limitation of the physical inputs. However, until now, only a few researchers have focused on the design of controllers with saturated inputs for such systems (Chen et al. 2009; Jiang et al. 2001; Luo and Tsiotras 2000; Wang 2008), etc., the control strategies of which are based on a kinematic model or switching technique (hence, discontinuous control law). Although there have also been many results for other systems with constrained inputs (for example Ailon 2010; Chen et al. 2011; He et al. 2007; Lan et al. 2006; Yu et al. 2010; Zhou et al. 2010), it is not easy to extend these results to the trajectory tracking control for the nonholonomic mobile robots based on the dynamic feedback model. Indeed, addressing the nonholonomic control problems with bounded inputs at dynamic levels is more realistic in engineering practice, where the practical torque and force are chosen as direct control inputs.
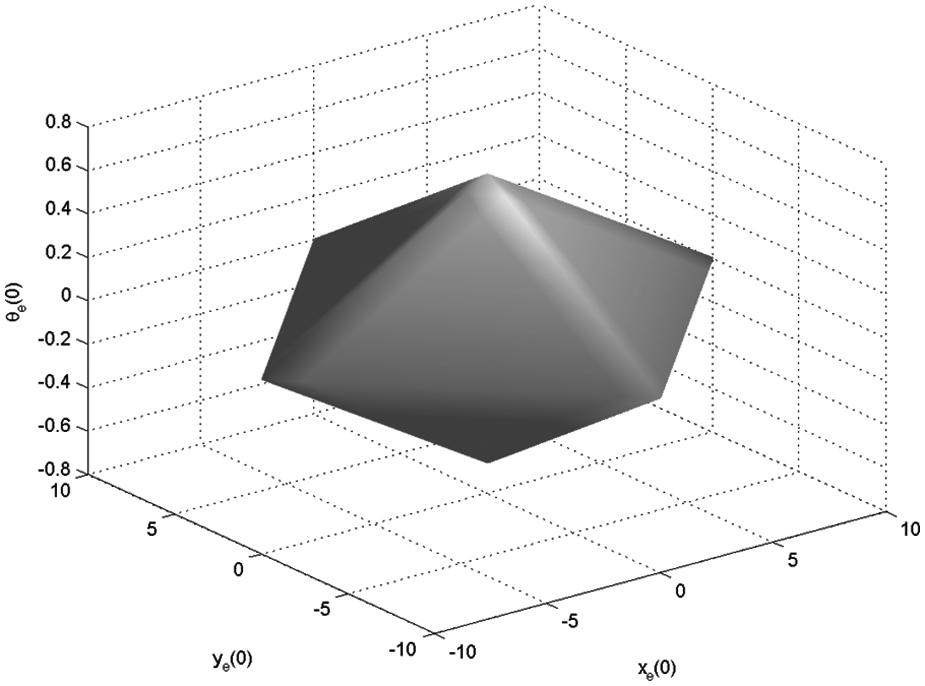
This article considers the saturated tracking control problem of nonholonomic mobile robots based on dynamic feedback. First of all, a specified attraction region
The dynamic feedback tracking controller is designed to make the generalized velocity converge to the virtual velocity controller in a finite time for any initial values of tracking errors in the specified attraction region.
All of the states of tracking errors are proved to go to zero as time goes to infinity.
Furthermore, the control inputs are continuous and bounded at any time by the saturated levels given in advance.
The structure of the paper is as follows: Section 2 gives a formalization of the problem considered in the paper and some proper assumptions. Section 3 states our main results including three preliminary lemmas, controller design and stability analysis. Section 4 provides an illustrative numerical example and the corresponding simulation results of the proposed methodology. Finally, a conclusion is shown in Section 5.
Problem statement
As shown in Figure 1, the two fixed rear wheels of the robot are controlled independently by motors, and a front castor wheel prevents the robot from tipping over as it moves on a plane. Assuming that the radii
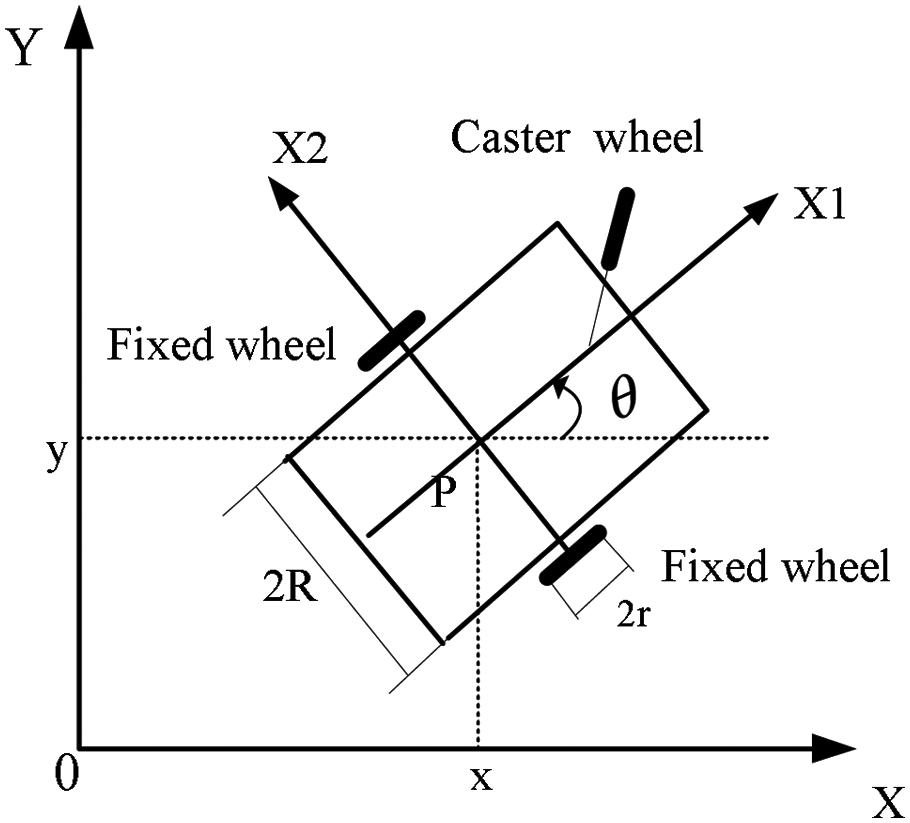
Nonholonomic wheeled mobile robot.
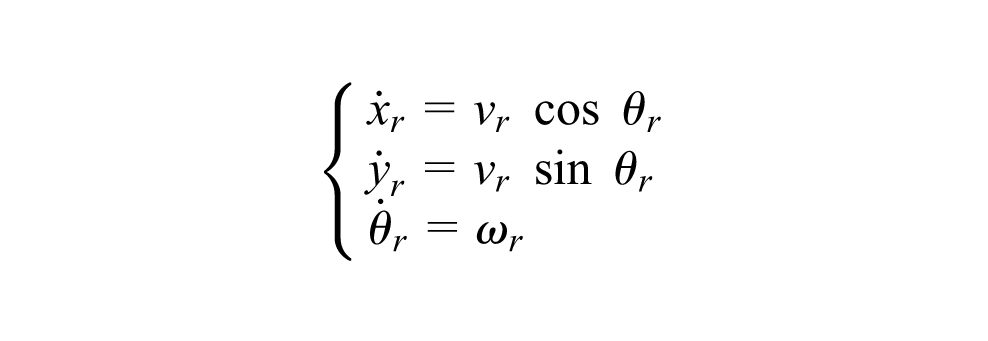
Such kinds of nonholonomic wheeled mobile robots have been studied by many researchers (see Canudas de Wit et al. 1996; Jiang et al. 2001; Kolmanovsky and McClamvoch 1995, and references therein). Using the same method of Campion et al. (1996), we can obtain its kinematic model described by the following equations:
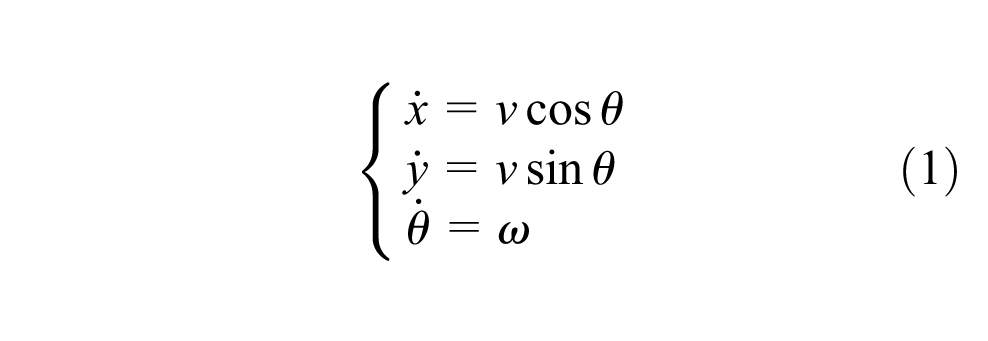
where
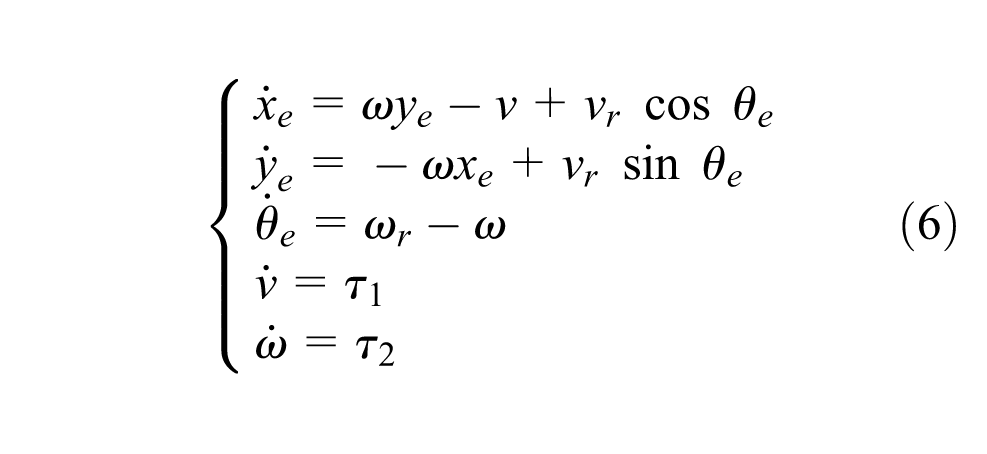
The dynamic feedback model corresponding to system (1) is
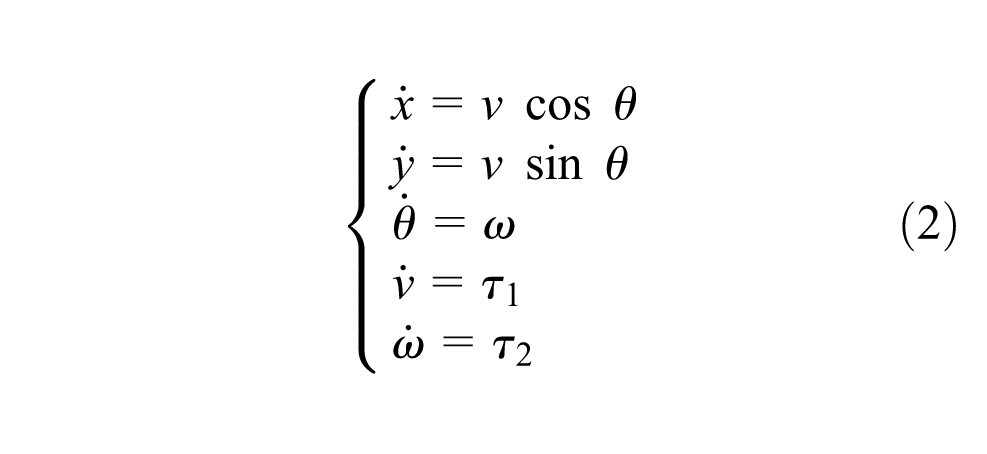
where
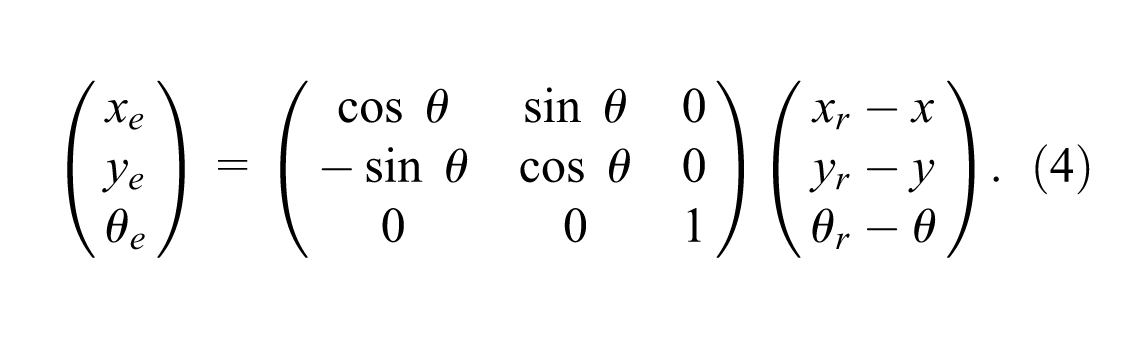
As shown in Figure 2, when considering the trajectory tracking problem of nonholonomic wheeled mobile robots, we can suppose that the desired reference trajectory
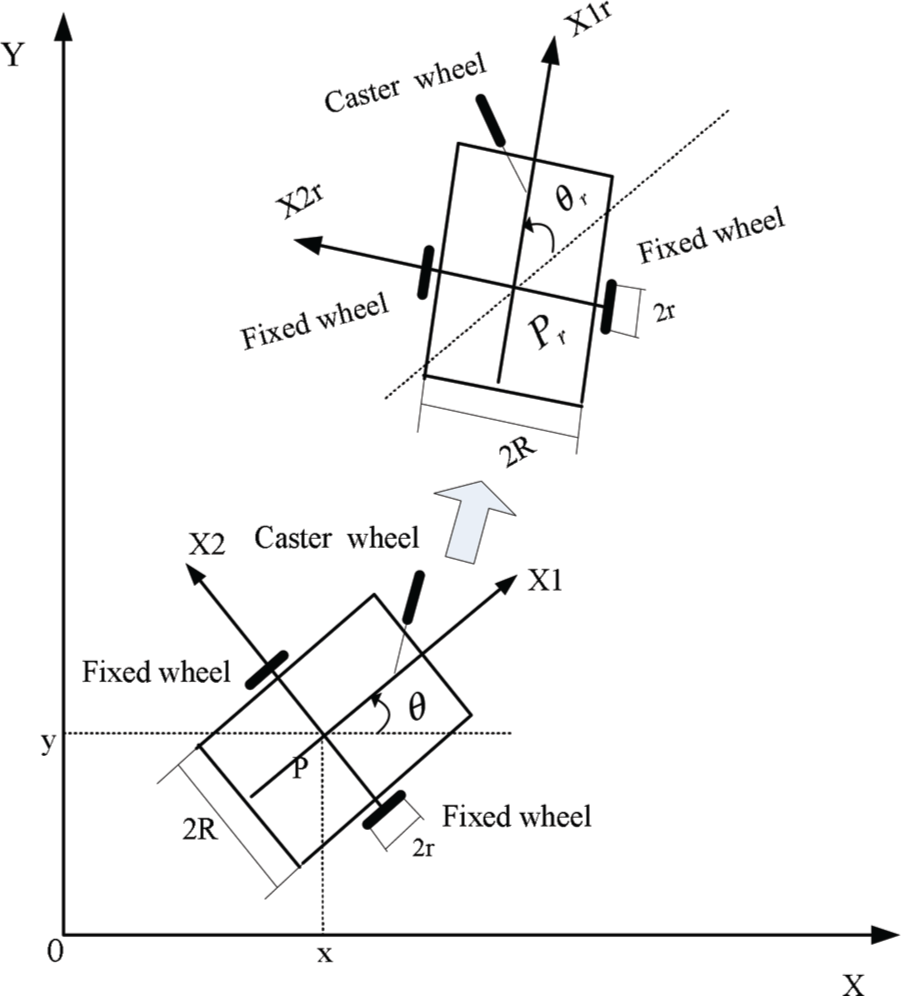
Trajectory tracking of nonholonomic wheeled mobile robots.
where
where

Let
where
Obviously, from (4), for any value of
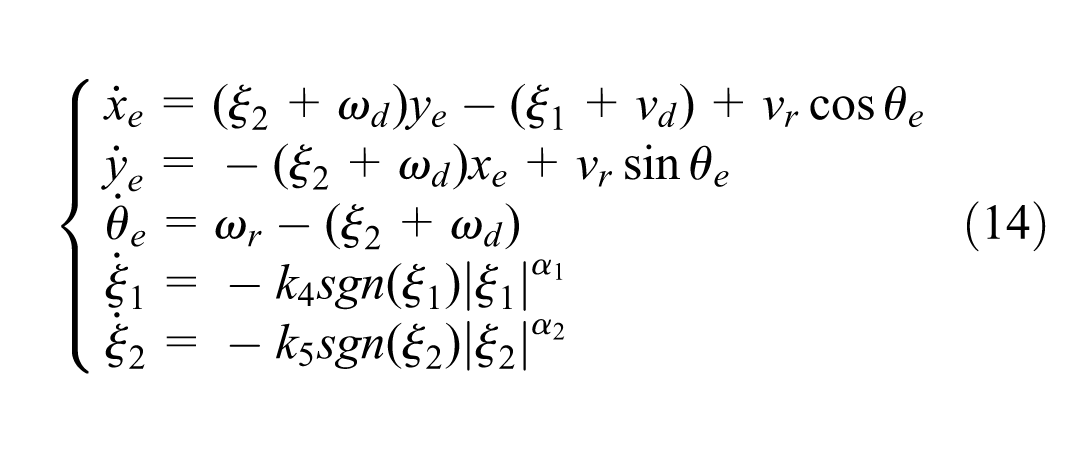
The derivative of
We consider the saturated output tracking control for the dynamic system (2) in this paper (i.e. the pose and angle
where the generalized torque inputs
where

where


where

are also known constants given arbitrarily in advance.
Then, the control objective is to design continuous and bounded inputs
Main results
In this section, the main results are presented. First, the following three lemmas are given, which are needed for the proof of our conclusion later.
then
where
where
The solution of system (8) converges to zero as
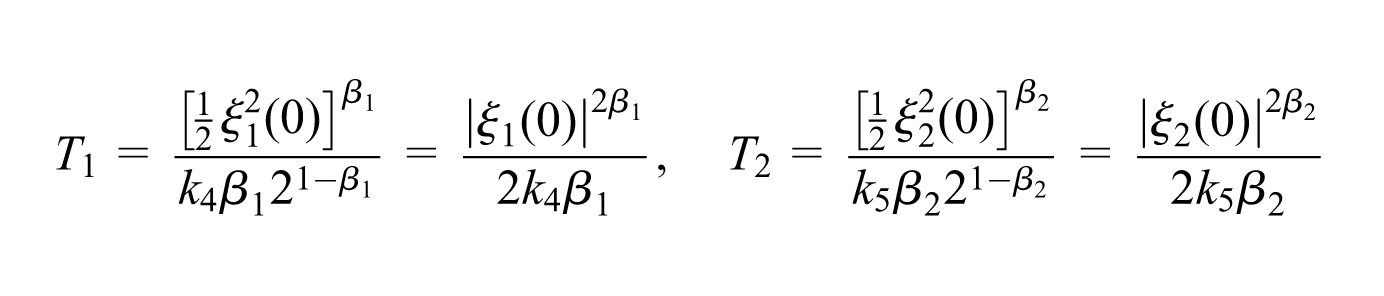
then, an upper bound of
Next, we give our main results.
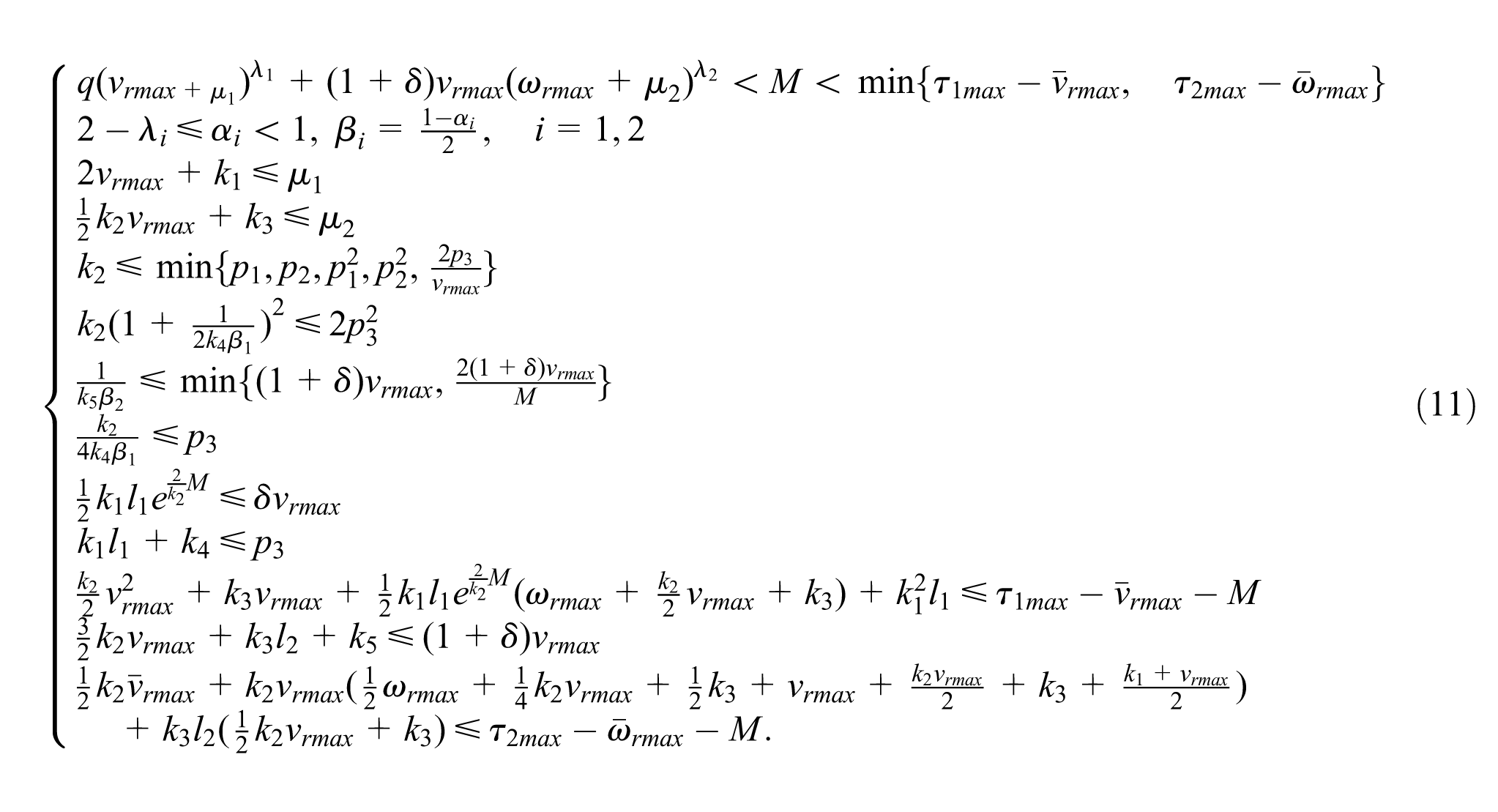
If the initial tracking error of system (6) belongs to a regional

where
Suppose that
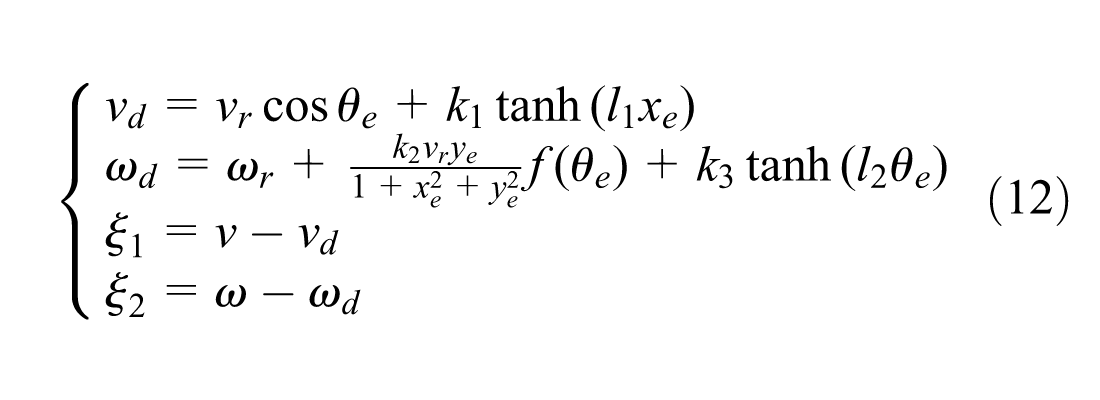
where
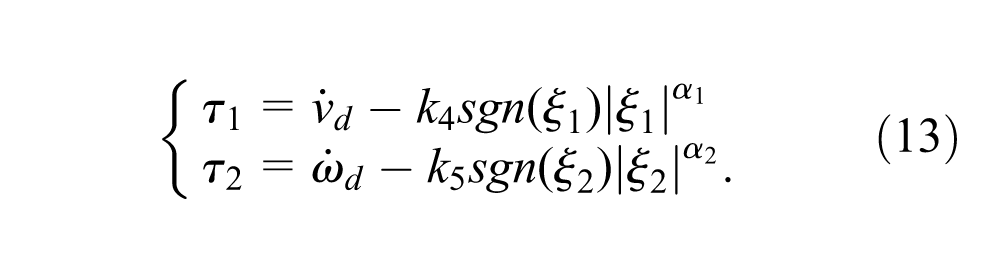
Then, the closed-loop system of the tracking errors composed by (6) and (13) can be asymptotically stabilized to the equilibrium point
According to Lemma 2, there exist two positive constants
such that

Then
By Lemmas 1 and 2, it is clear that the state feedback law (13) is continuous. Next, we prove that the control inputs (13) satisfy the saturation constraints (7) in any time. Consider an auxiliary function that is positive definite and radially unbounded with respect to

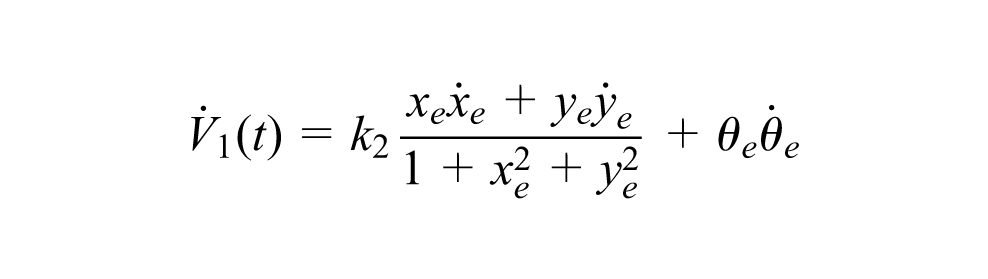
Taking the time derivative of
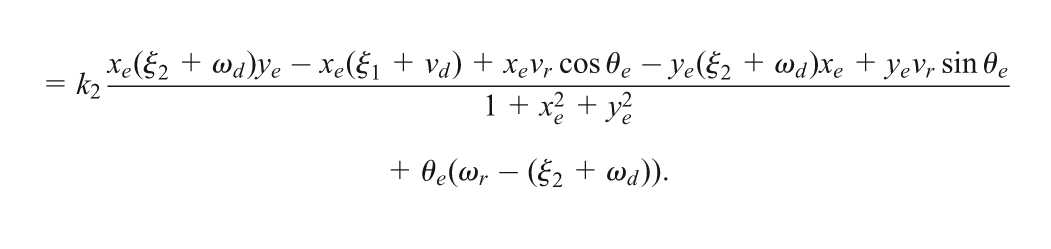
Substituting the virtual control laws (12) into the formula above, yields

Noting that

Because
we have
Integrating it from 0 to
The reason is explained below. If
On the other hand, if
By using (16), we have
From (14), it can be seen that
Let

From Lemma 3, we can obtain
Applying a simple inequality described by
we have

Substituting the expressions of

Noting that,
By the third inequality in (11), we can obtain
Similarly, we have
Because

and from the fourth inequality in (11), we have
Then according to Assumption 2 and the second inequality in (11), from (22) and (24), we can obtain
So, from (21), we have
From the fifth to the seventh inequality in (11), we have

it implies that
By (17), (25) and the three inequalities above, we can obtain
Thus,

the bounds of
Next, we consider the boundedness of
where

we have
Similarly, we have


Once again applying (23), (27) and from Assumption 1, we can obtain
Substituting (22) and (24) into the formula above, it becomes

Finally, we obtain the saturability of
From (22), (24) and (26), it follows that

From these inequalities (9th to 11th) in (11), it can be seen that


Taking into account the range of

Hence, according to the 5th, 12th and 13th inequality in (11), we also have
where
According to the first inequality in (11), it is obvious that
The special attraction region
Choosing
Step 1. From the first inequality in (11), we have
Then, the formula (r1) means that
It can be rewritten as
From the 7th and the 12th inequalities in (11),
Step 2. From the 10th inequality in (11), we choose
Step 3. From the 4th and the 11th inequalities in (11), we choose
Step 4. According to the 12th and the 13th inequalities in (11),

Step 5. In this step,
As for the 12th inequality in (11), let
Suppose for a moment that
Then, by the 4th, 5th, 6th, 8th, 11th, 12th and the 13th inequalities in (11),
Step 6. From the 13th inequality in (11), let
Combining the 3rd and the 13th inequalities in (11), we select
Step 7. In the last step, by the 9th, 10th and the 11th inequalities in (11), we can choose
Thus, it is easy to obtain a feasible solution of (11) in this way. In order to show this method more clearly, the following example is given to explain how we picked the parameters for (11) one-by-one:

Assume that
Step 1. By formula (r4), selecting
Step 2. From (r2), we can chose
Step 3. According to (r3) and (r4),
Step 4. From (r2), choosing
Simulations
In this section, the controller proposed is used to show how the saturated stabilization of the closed-loop system can be achieved. We demonstrate the effectiveness of our methods by an example.
In the following simulation, we assume that:
Figures 4–7 show some simulation results with MATLAB. From Figure 4, it can be seen that all of the tracking error states of the closed system asymptotically converge to the origin equilibrium point, i.e.
Tracking error variables.
Auxiliary state variables.
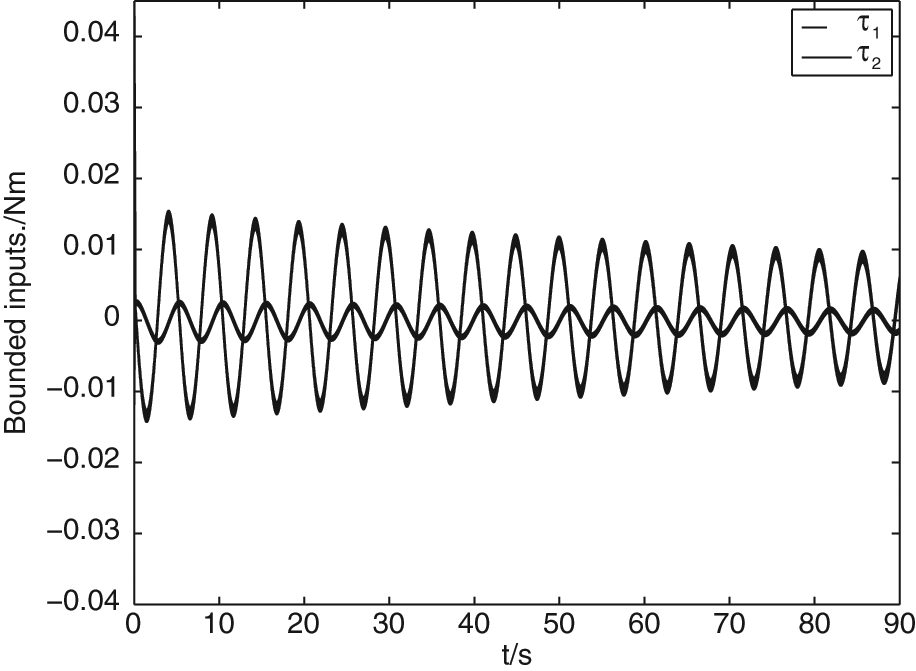
Bounded inputs.
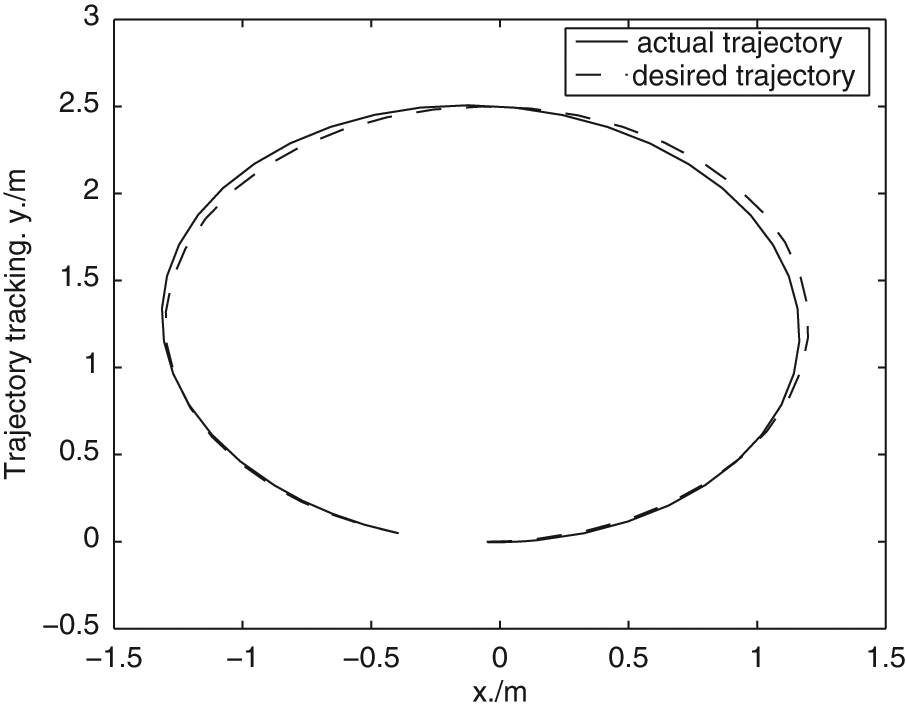
Trajectory tracking.
Figure 5 shows that the auxiliary state variables converge to zero in a finite time, after this,
By Figure 6, it shows that the inputs keep continuity and boundedness by the saturated levels
Figure 7 demonstrates the good tracking performance of actual robot with respect to the desired trajectory.
Conclusion
The tracking problem based on dynamic feedback for the nonholonomic wheeled mobile robot with inputs saturation has been discussed in this paper. The contributions of this paper include having an applied finite-time control technique and back-stepping procedure such that the continuous, saturated tracking controller can be obtained. The closed-loop system of tracking errors can be asymptotically stabilized to zero equilibrium point. We work on extending the results to the saturated robust tracking problem of nonholonomic systems with uncertain parameters or disturbance in the coming time.
Footnotes
Appendix A. Proof of Lemma 1
The function
It follows that
Applying L’Hospitals rule, we have
Thus,
where
which means that
Next, we prove that
Second, if
Note that
Substituting the expression of
Then,
Hence,
Appendix B. Proof of Lemma 2
Take a Lyapunov function candidate,
its derivative is
according to Bhat and Bernstein (1998) and Hong et al. (2001), we have
This completes the proof of Lemma 2.
Appendix C. Proof of Lemma 3
Because
We give our claim by contradiction. Suppose that (10) does not hold and for some
This problem will be discussed in two cases:
which contradicts the assumption (30). This completes the proof of Lemma 3.
Funding
This work was supported by the National Science Foundation (grant number 60874002), the Key Project of Shanghai Education Committee (grant number 09ZZ158), the Key Discipline of Shanghai (grant number S30501), the Scientific Research Foundation for Returned Scholars, Ministry of education of China (grant number BZX/11H002), the Youth Fund of Hohai University (grant number 2010B23514) and the Natural Science Foundation of Hebei Education Committee (grant number Z2011119).