
Abstract
This paper studies the impact of the accelerometer output error on the levelling accuracy in levelling mode of the airborne remote sensing stabilized platform. On the basis that the accelerometer output signal is non-stationary, a non-stationary time series model of ARIMA(3,0,1) is established, with which an adaptive Kalman filter is designed. In the Kalman filter, an online correction method for the forgetting factor based on real-time measurements is presented, achieving the automatic adjustment of the Kalman filter gain. The model of the accelerometer and the adaptive Kalman filter are applied to the airborne remote sensing stabilized platform principle prototype made by our research group. On one hand, the results show that the model is fit for the accelerometer. On the other hand, it is noted that the new filter has improved the measurement accuracy of the accelerometer, depressed the oscillations of the levelling progress of the platform and reduced the steady-state error of the platform. The levelling performance of the stabilized platform is efficiently improved after all these work.
Keywords
Introduction
An airborne remote sensing system is an effective way to obtain high-resolution remote sensing images (Mostafa and Hutton, 2001). The system plays an important role in the fields of disaster and environmental monitoring, resource surveys, basic surveying and mapping areas (Wang and Wang, 2010; Wang et al., 2009; Zhang and Zhang, 2009). Installed between the aircraft and the remote sensing payload (such as a large-array CCD image system), the stabilized platform serves as an important part of the airborne remote sensing system. The platform carries the remote sensing payload and can effectively depress many disturbances (Chen et al., 2011) that deteriorate the line-of-sight stability. In other words, the platform can improve accuracy of the line-of-sight stability (Hilkert, 2008; Masten, 2008; Thomson, 1998; Wang and Williams, 2008) and the overlap degree between two neighbouring images. Thanks to the stabilized platform, the airborne remote sensing system can efficiently obtain images with high precision.
In normal operating mode, the stabilized platform tracks the Position and Orientation System’s (POS) output attitude signal (Fang and Yang, 2011; Toth, 2002; Wei et al., 2007), so that the inner gimbal (the remote sensing payload) of the platform can be stabilized in a geographic co-ordinate system. When the POS has no signal or breaks down, the stabilized platform will enable the levelling operating mode and work independently; namely the attitude signal of the POS for the position loop feedback will be replaced by the accelerometer’s output angle signal. This work mode requires that the aircraft tries its best to fly in uniform motion. However, it is very difficult for the aircraft to maintain a constant speed. Random vibration generated by environmental interference like airflow disturbances and internal factors such as engine vibration severely affects the measurement accuracy and performance of the accelerometer, thus degrading the stability performance of the platform. At present, the steady precision of PAV30, the most widely used platform in China, is decreased enormously under disturbance when the PAV30 is operated without a POS. Apparently, this cannot be used in an airborne remote sensing system. Therefore, for better performance, it is essential to establish an accelerometer model with error compensation for the platform. In a quasi-static situation, the strong randomness of the accelerometer error can be solved by software modelling as well as digital filtering. There are many methods used for accelerometer error modelling and compensation, such as the FIR filter (Gu and Lu, 2009), wavelet analysis (Gao et al., 2010; Wang et al., 2010), Kalman filter (Stakkeland et al., 2007; Yan et al., 2009; Zhao et al., 2011).
The adaptive Kalman filtering method has been widely used in inertial measurement systems (Bao and Wu, 2008; Fu et al., 2009; Huang et al., 2010; Lv and Wang, 2005) among all these methods. Through analysis of the accelerometer output signal of the stabilized platform, the output signal is non-stationary and as a result, a description of it requires a non-stationary process. In the levelling operating mode, the platform frame has exiguity oscillations among the vicinity equilibrium position, and measurement noise varies as time passes, making the accelerometer error very complex. Therefore, the accelerometer model shows stronger randomness and time-varied parameters. Meanwhile, the present filtering methods cannot achieve satisfactory results if we use them directly. The paper by Bao and Wu (2008) confirms that the filter weighting coefficient
After analysing features of the accelerometer output signal in the levelling work mode, this paper studies the non-stationary time series model of accelerometer output. A new kind of online correction method for the forgetting factor is proposed at the same time, estimating the measurement noise in real time. An adaptive Kalman filter based on the time series model of the accelerometer is then designed. Lastly, the model of the accelerometer and the new adaptive Kalman filter are tested on the airborne remote sensing stabilized platform.
Description of principle
The principle of the stabilized platform
The airborne remote sensing stabilized platform is used for carrying a payload and stabilizes it in the geographic co-ordinate system (Li and Zhou, 2010; Qi, 2009). Three work modes for the stabilized platform are the POS combination operating mode, the levelling operating mode and the manual operating mode. The manual operating mode is mainly used for emergency processing. A diagram of the control system of POS combination and levelling operating mode is shown in Figure 1, and the difference between the two operating modes is that the position loop feedback signals of the control system are not the same. The platform obtains the attitude reference from the POS device under normal working mode, and the accelerometer gives the platform the attitude reference under the levelling operating mode when the POS device has no signal output or breaks down. Hence, during the levelling operating mode, the precision of the accelerometer output signal has a significant impact on the stability performance of the stabilized platform.
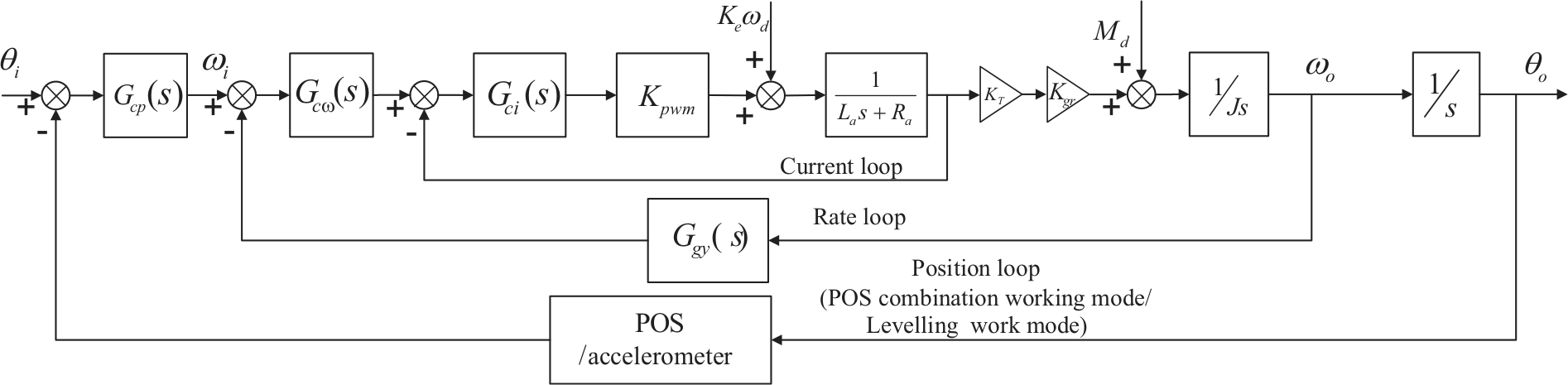
Diagram of three-axis airborne remote sensing stabilized platform control system.
In Figure 1,
The position loop plays a crucial role for the stabilized platform. It is the key to ensure great position precision and stability performance of the platform (Zhang, 2009). Especially when operated in the levelling operating mode without output of the POS, the angle position calculated via the accelerometer output becomes inaccurate and random. Therefore, it is necessary to model and compensate for the accelerometer, to ensure the stability performance of the airborne remote sensing stabilized platform.
Principle of level angle measurement by accelerometer
The accelerometer measures specific force. When static or moving at a constant speed, the output is gravitational acceleration. Therefore, according to the relationship between the output signal and the gravitational vector, the levelling attitude angle is calculated. The angle measuring principle is shown in Figure 2.
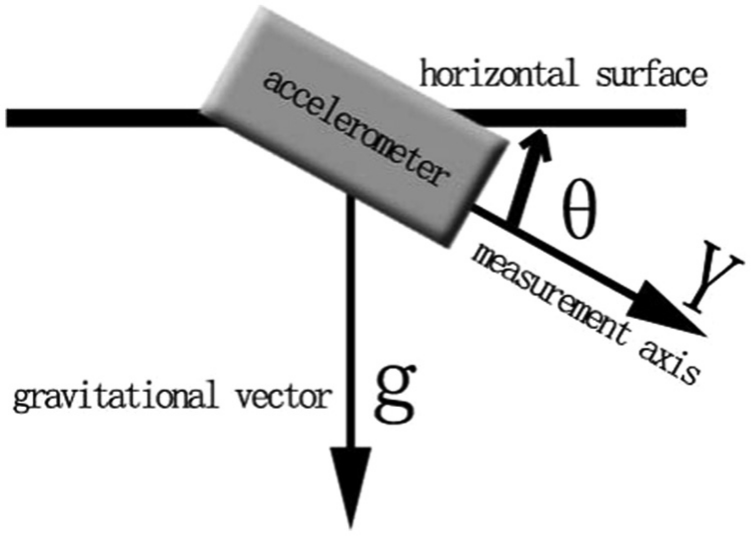
Principle of measuring the levelling attitude angle by accelerometer.
The accelerometer output signal is expressed as follows
where

Equation (2) shows that
The adaptive Kalman filter algorithm
Filter scheme
From the system’s perspective, the accelerometer output time series can be viewed as a dynamic system. Define the output data of the accelerometer at different moments as the state variables, and the time series model can reflect the relationship between the system states. If output of the sensors is not steady, direct ARMA modelling for it is impossible. First, the non-stationary time series should be stabilized, then the ARMA model for stabilized data is established, with the help of which the ARIMA model for non-stationary data can be deduced finally. Therefore, an adaptive Kalman filter based on the time series model can be designed for the accelerometer to restrain its output signal errors. Defining
where
The observation equation for the system is expressed as follows
The present accelerometer measurement result is used as the observed vector for the dynamic system, so that
Online correction method for weighting coefficient of measurement noise
Bao and Wu (2008) introduces the forgetting factor b (0<b<1) and weighting factor
After the introduction of
The introduction of b prevents the filter from divergence, but the tracking performance deteriorates when the signal changes. The tracking performances of Saga–Husa adaptive Kalman filter will decrease when using a static memory length of the input data. According to the literature (Bao and Wu, 2008), this paper proposes a new online correction method for the forgetting factor by introducing an online weighting coefficient, which can automatically adjust the proposed forgetting factor, and improve the tracking performance of the adaptive Kalman filter. The online weighting coefficient
where
The weighting coefficient obtained by the method proposed in this paper can be expressed as
Thanks to the equation above, the system corrects the weighting coefficient online and filters well despite of the noise changes.
Experiments
Experimental set-up
The experiment set-up mainly comprises a DC power supply, the airborne remote sensing stabilized platform, and the data acquisition and processing systems, as shown in Figure 3. The stabilized platform is the airborne remote sensing three-axis stabilized platform prototype, which is designed by our research team. The platform can achieve the levelling functions and the stability functions independently, and also it can send out the output data of the gyroscope, accelerometer and the linear encoder through the serial port at the same time. The data acquisition and processing system achieves the output signal from the platform through the serial port. Moreover, the notebook PC will analyse and deal with the received data simultaneously. The accelerometer used in the stabilized platform is the Model 4001A MEMS accelerometer, and the linear grating sensor is RGH41D, with length resolution 5 µm and angle resolution 0.0013°.
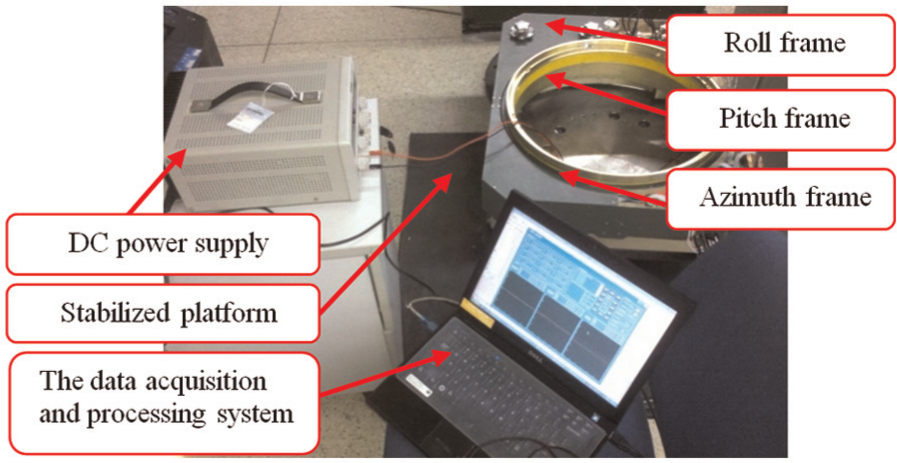
Experiment facilities.
Accelerometer data collection and time series model establishment
For the reason that the external frame, namely the roll frame, does not adjust its centre of gravity, the middle frame (the pitch frame) is selected as the experimentation object. Firstly, we need to obtain the output signal of the pitch accelerometer in the stabilized platform, and then analyse the signal series, so that the model of the accelerometer can be generated by using the method above. Fix the pitch frame of the airborne remote sensing stabilized platform in a horizontal position and do not start the pitch frame control system, then collect the output data series of the accelerometer by a frequency of 50 Hz for an hour. Obtain the average result series of the output data per 10 s, and then use Equation (2) to calculate the angle. Finally, the result is displayed in Figure 4. Checking the stationary character of accelerator output by the run test theory (Wang et al., 2006), the result is U=−13.3149>1.96, which means that the data series is non-stationary, so the time series model of ARMA cannot be applied directly. The first-order difference is then used in the sampled data series obtaining a new data series
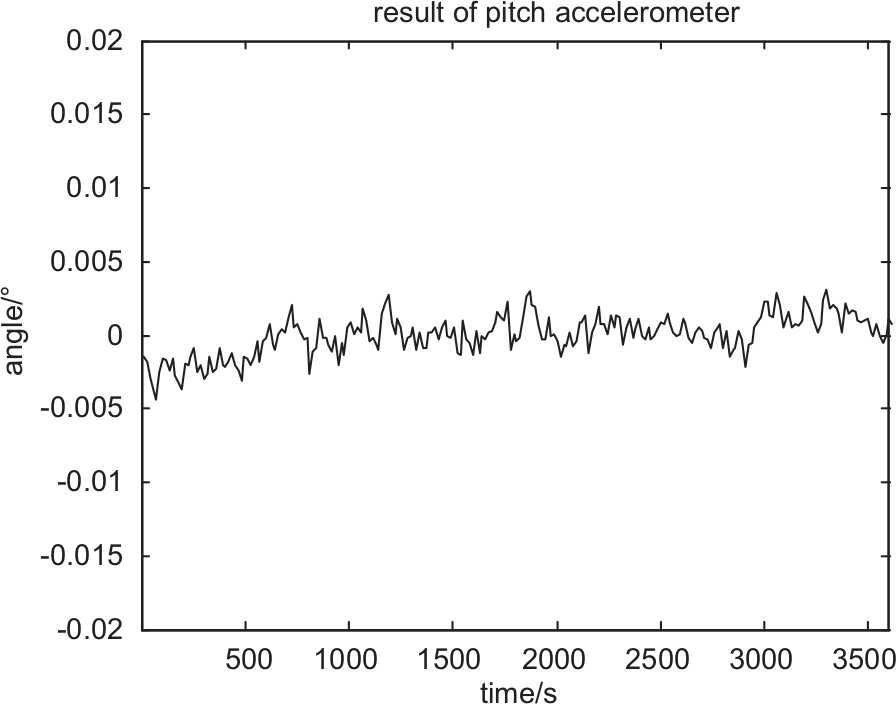
Output data of accelerator.
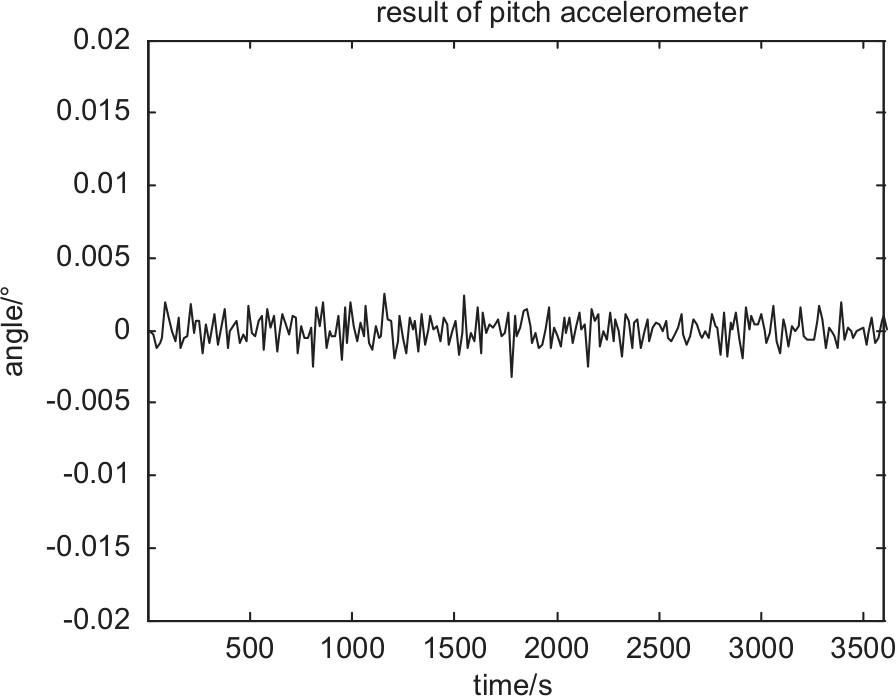
Accelerator data after first-order difference.
The non-stationary time series ARIMA model is obtained by substituting

The state transfer matrix for the adaptive Kalman filter is written as follows according to Equation (10)
Experimental results
In this section, the effectiveness of the proposed accelerometer model and adaptive Kalman filter is illustrated by a series of experiments such as the accelerometer model validation experiment, dynamic levelling experiment and steady precision analysis experiment.
Accelerometer model validation experiment
Adjust the pitch frame of the airborne remote sensing stabilized platform to a horizontal position and do not control the pitch frame. Collect the output signal of the accelerometer in this situation and then the steady precision for that data is 0.0195° (1σ). The Saga–Husa adaptive Kalman filter and the method brought about in this paper are used separately to process the accelerator output data, with the raw data and the data after processing shown in Figure 6.
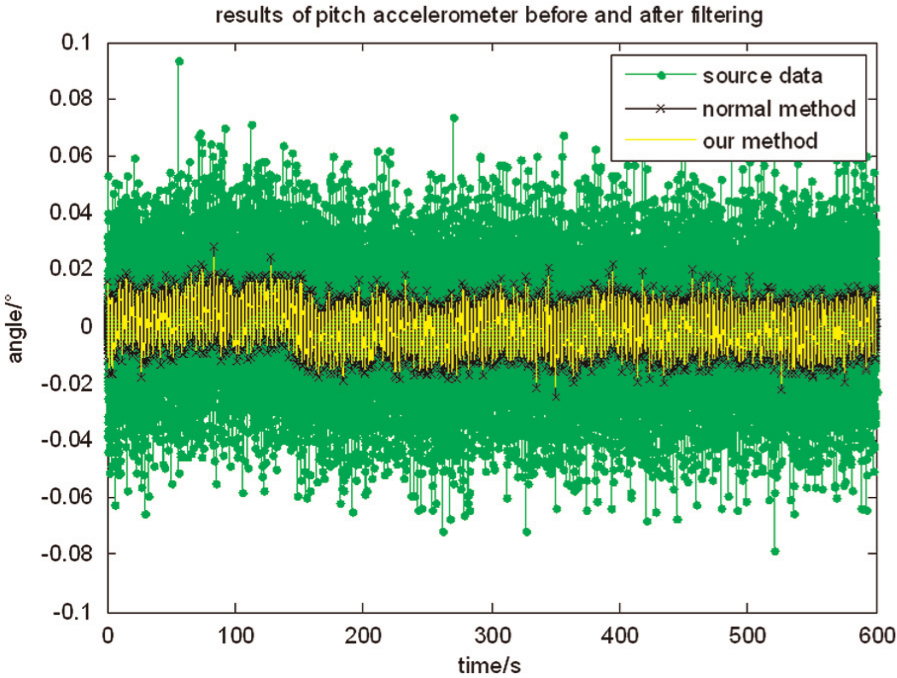
Comparison of the results of the pitch accelerometer.
The mean square error for data after processing by the two methods mentioned above are 0.0057° and 0.0052°, 29.2% and 26.7% of the data before filtering, respectively.
Dynamic levelling experiment
Adjust the pitch frame of the airborne remote sensing stabilized platform to the positive and negative limit position (corresponding to 5° and −5° relative to the horizon position) separately, then start up the control system to adjust the pitch frame to a horizon position in the levelling operating mode. Collect and analyse the output signal of the accelerometer during the process of levelling. Three sets of experiments are conducted in order to prove the validity and correctness of the method in this paper. In the first set, the unfiltered angle data of the accelerometer is used as the position loop feedback signal. In the second set, data is processed by Saga–Husa adaptive Kalman filter, and in the last set, the method proposed in this paper helps to process the data. The results are shown in Figure 7.
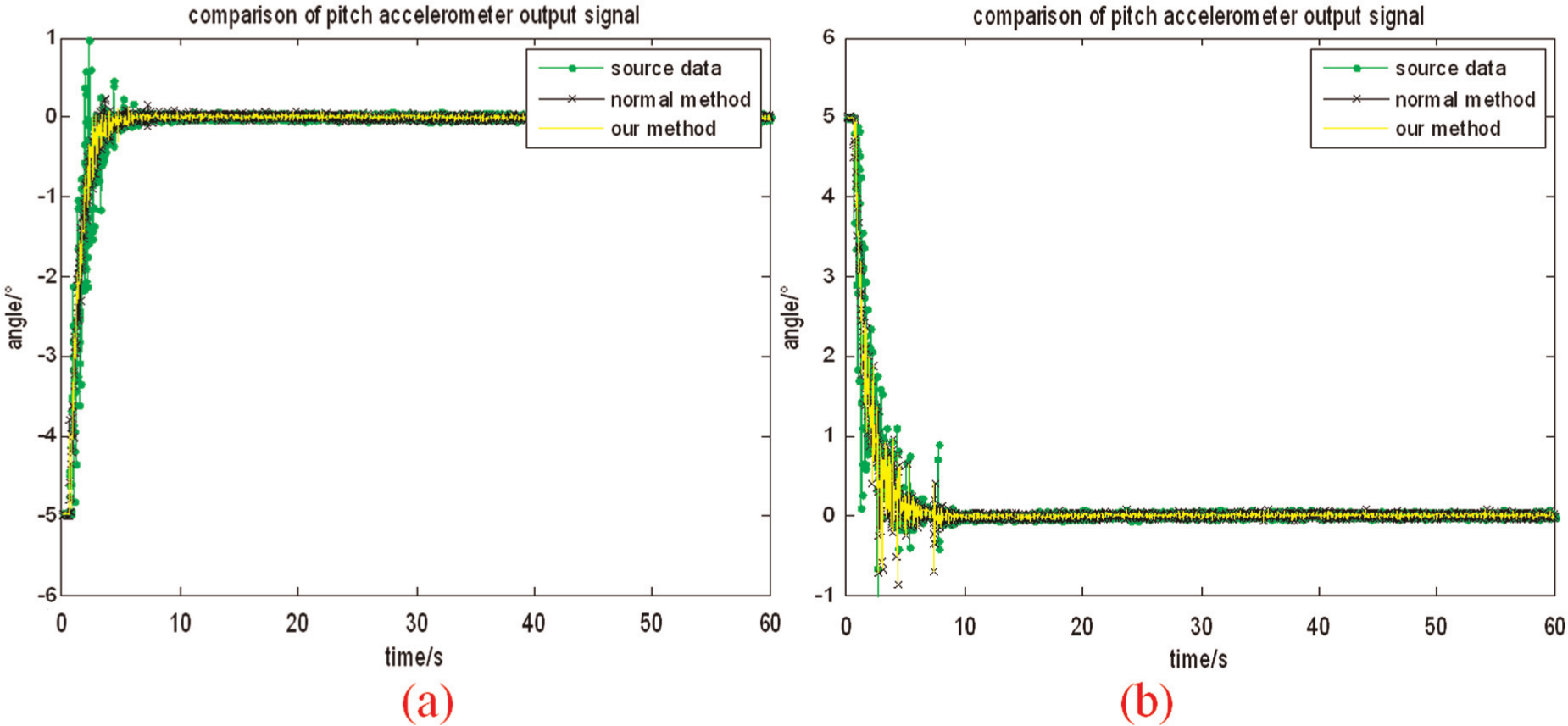
Results of dynamic levelling: (a) from −5° to 0°; (b) from 5° to 0°.
Figure 7(a) is the data for levelling from −5° to 0°. Without any filter, the mean square error of vibration for data of the first 10 s is 0.4697°. By the Saga–Husa adaptive Kalman filter and the method of this paper, the mean square errors are 0.1792° and 0.1647°, 38.2% and 35.1% of the mean square errors for raw data. Figure 7(b) is the data for levelling from 5° to 0°. Before filtering, the mean square error of vibration is 0.5511°. By the Saga–Husa adaptive Kalman filter and the method of this paper, the mean square errors are 0.2846° and 0.2733°, 51.6% and 49.6% of mean square errors for raw data.
Experiment of steady precision analysis
To verify the performance of the proposed method in this paper, a steady-state accuracy analysis experiment is conducted. The pitch frame of the airborne remote sensing stabilized platform is in a horizontal position at the beginning of experiment. During the experiment, the unfiltered and filtered data of the accelerometer are used as the position loop feedback signal, and the output data of the linear encoder is collected. The experimental data is shown in Figure 8.
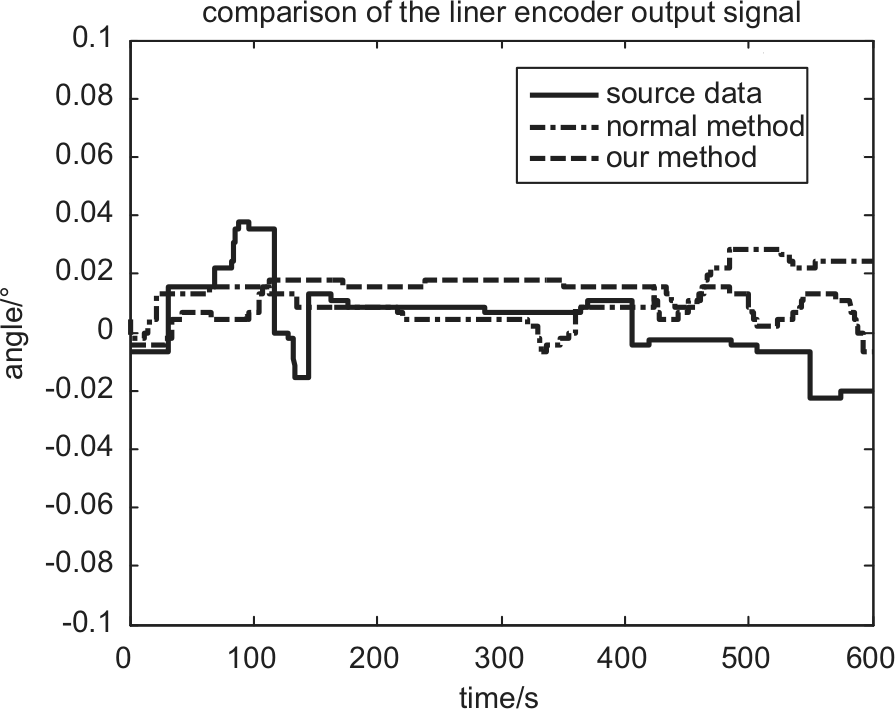
Static levelling error comparison of pitch frame.
It is seen in Figure 8 that before filtering, the mean square error for static data is 0.1297°. By the Saga–Husa adaptive Kalman filter and the method of this paper, the mean square errors are 0.0852° and 0.0669°, 65.7% and 51.6% of mean square errors for raw data.
Discussion
Measurement noise is the key factor that influences performance of the Kalman filter. Changes in measurement noise lead to decreasing filter precision. Through observing measurement noise, the weighting coefficient of Kalman filter parameters is corrected online, providing an effective and efficient way to minimize the impact of measurement noise changes towards estimation precision of the whole system.
The experimental results in this paper indicate that non-stationary time series model can accurately express the features of the accelerator output. Previously, experimental data for verifying accelerator model assures the validity of the ARIMA model. In the dynamic levelling and steady precision analysis experiment, a filter based on ARIMA works well, but filtering precision is not as great as the model precision, for in the control loop, the ARIMA filtering precision is effected by other parts such as the transmission part, and the accelerator parameters vary to some extent. The filtering method proposed in this paper has a higher steady precision than the Saga–Husa adaptive Kalman filter. It can be seen that the online correcting measurement weighting coefficient via the method in this paper is appropriate and effective.
Conclusions
The influence of the accelerometer on the airborne remote sensing stabilized platform is discussed in this article. According to the characteristics of the pitch frame accelerometer output signal, the non-stationary time series ARIMA(3,0,1) model is established by using the time series analysis, and an adaptive Kalman filter based on the non-stationary model is designed. In order to improve the performance of the Kalman filter, an online correct coefficient for the forgetting factor, which can automatically adjust itself during the filtering process, is brought forward and achieves the automatic adjustment of the forgetting factor. Ultimately, the time series model of the accelerometer and the adaptive Kalman filter based on the ARIMA(3,0,1) model are tested on the airborne remote sensing stabilized platform principle prototype. The experimental results demonstrate that the method proposed in this paper can suppress attitude fluctuation of platform in the levelling mode and improve the levelling performance of the airborne remote sensing stabilized platform.
Footnotes
Funding
The project is supported by the National Basic Research Program of China (973 program; Grant No. 2009CB724001/2) and the 863 projects of China (Grant No. 2006AA06Z223).