This paper investigates the H2 control problem for a class of discrete-time two-dimensional (2D) switched systems represented by a model of Roesser type. By using a multiple Lyapunov function method, sufficient conditions for evaluation of the H2 performance for the 2D switched systems are presented in terms of linear matrix inequalities. Based on the obtained results, an H2 output feedback controller design scheme is developed for the discrete-time 2D switched systems. A numerical example is included to demonstrate the effectiveness of the proposed method.
Two-dimensional (2D) systems have attracted considerable research attention in control theory and practice over the past few decades due to their wide applications such as in energy exchange processes, electricity transmission, multi-dimensional digital filtering and linear image processing (Kaczorek, 1985; Kevorkian, 1993; Xu et al., 2004). Two typical examples are the wave equation, which arises in many different fields, such as acoustics, electromagnetics, fluid dynamics, quantum mechanics, general relativity, the heat equation (which describes the temperature in a given region over time) and Poisson’s equation. This stimulates research on 2D discrete systems, which can be represented by different models such as the Roesser model, the Fornasini–Marchesini model and the Attasi model. Some important problems such as stability and stabilization have been investigated in Lam et al. (2004), and many works on the H∞ control problems and filtering for 2D systems have been provided by many researchers (Du and Xie, 2002; Gao CY et al., 2008; Gao H et al., 2004; Li and Gao, 2012; Paszke, 2004; Xu and Zou, 2008; Xu et al., 2005, 2011).
In many modelling problems of physical processes, a 2D switching representation is needed, e.g. the transport process with multiple lines (Benzaouia et al., 2011). So 2D switched systems have also attracted considerable research attention. There are a few reports on 2D discrete switched systems; Benzaouia et al. (2011) first considered the problems of stability and stabilization for 2D switched systems with arbitrary switching sequences. Recently, the exponential stability and stabilization of the discrete 2D switched system in the Roesser model was first investigated via the average dwell time approach in Xiang and Huang (2013).
H2 optimal control for continuous or discrete-time systems is a classical problem in system theory. Its objective is to minimize the energy of the system output when the system is subjected to a unit impulse input or, equivalently, a white noise input of unit variance. Due to this analytically and practically meaningful specification, the H2 problem and solution have been well studied and applied for several decades (Du et al., 2006; Feng and Sun, 2002; Mahmoud, 2009; Rotea, 1993). Recently, some results on such a topic for 2D systems have also appeared. For example, by using the linear matrix inequality (LMI) technique, a solution to the mixed H2/ H∞ filtering problem of 2D systems was presented in Tuan et al. (2002), where a H2 norm is defined as the square of the peak amplitude of output when the total energy of the past input is no greater than unity. In Yang et al. (2006), the mixed H2/H∞ control problem for 2D discrete systems in the Roesser model was solved, where the H2 norm of 2D discrete systems was computed with the unit impulse input.
However, because of the complicated behaviour caused by the interaction between the continuous dynamics and discrete switching, the H2 control problem of 2D switched systems is more difficult to study. To the best of our knowledge, there are no results on such a topic for these systems reported. Moreover, the aforementioned methods cannot be directly applied to 2D switched systems, and this constitutes the main motivation for the present study.
In this paper, we confine our attention to the H2 control problem of 2D switched discrete systems represented by the Roesser model. The main theoretical contributions are threefold: 1) we further contribute to the development of stabilization for a class of 2D switched systems represented by the Roesser model; 2) the multiple Lyapunov function method is used to derive a condition for evaluation of the H2 performance of 2D discrete switched systems, which has not been considered in the existing literature; and 3) a mode-dependent dynamic output feedback controller is designed for the underlying systems such that the resulting closed-loop systems are asymptotically stable with H2 performance under arbitrary switching sequences. The proposed method can also be applied to non-switched 2D discrete linear delay-free systems.
The organization of this paper is as follows. We next formulate the problem and present some preliminary results, then the analysis of asymptotical stability with H2 performance is given. The H2 dynamic output feedback controller design scheme is developed, followed by an example to illustrate the effectiveness of the proposed approach. Finally, the paper is concluded.
Notations
Throughout this paper, the superscript ‘’ denotes the transpose, and the notation means that matrix is positive semi-definite (positive definite, respectively). denotes the Euclidean norm. represents identity matrix with appropriate dimension. denotes diagonal matrix with the diagonal elements , . denotes the inverse of . The asterisk in a matrix is used to denote a term that is induced by symmetry. The set of all non-negative integers is represented by . A 2D signal with , is said to belong to the 2D space if
where denotes the norm of . A 2D signal in the space is an energy-bounded signal.
Problem formulation and preliminaries
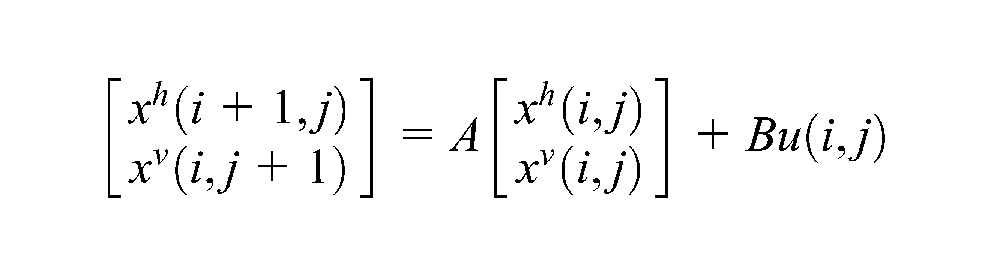
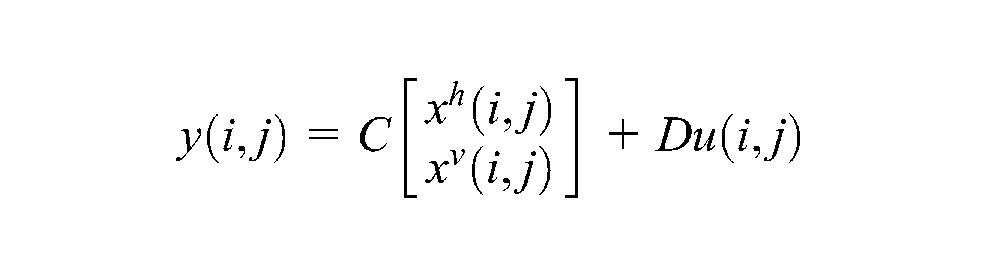
The Roesser model for a 2D switched system is given by the following state equation:
where and are the horizontal state and the vertical state respectively, is the whole state in with , is the control input, is the controlled output, and are integers in . is the switching signal. is the number of subsystems. , , denotes that the th subsystem is activated. , , and , , are real matrices with appropriate dimensions. The boundary condition satisfies with defined as follows:
Remark 1. In this paper, it is assumed that switching occurs only at each sampling point of i or j. The switching sequence can be described as
Remark 2. It is assumed that system (1) satisfies the following two conditions:
There is no jump in the state x(i, j) at the switching instants;
There is no Zeno behaviour (there is a finite number of switches on every bounded interval of time).
Remark 3. If there is only one subsystem in system (1), it will degenerate to the following 2D Roesser system
Therefore, the addressed system (1) can be viewed as an extension of discrete 2D Roesser systems to switched systems.
Denoting , we first introduce the definition of asymptotic stability for 2D switched system (1).
Definition 1 (Lam et al., 2004). A 2D switched system (1) with is asymptotically stable under the switching signal if .
Let , , denote the th column of the identity matrix and be the 2D discrete time unit impulse signal satisfying
Further subject to the zero boundary condition , with and the input , , let the impulse response of the 2D switched system be
If the 2D switched system is stable, its impulse response for . We can define the H2 norm of the 2D switched system G as
Physically, the square of the H2 norm of the system represents the amount of the system output energy when it is subject to the unit impulse input or a Gaussian white noise input with unit variance. Now, consider that the 2D switched system G in the Roesser model (1) is subject to the input . Under such an input, let and denote the system horizontal state and vertical state, respectively. Furthermore, let
and write the matrices and as
Under the zero boundary condition, we can express the system impulse response , , as
Lemma 1 (Boyd et al., 1994). For a given matrix where , are square matrices, the following conditions are equivalent:
;
H2 performance analysis
We now present a sufficient condition for evaluation of the H2 norm of 2D switched system in the Roesser model (1).
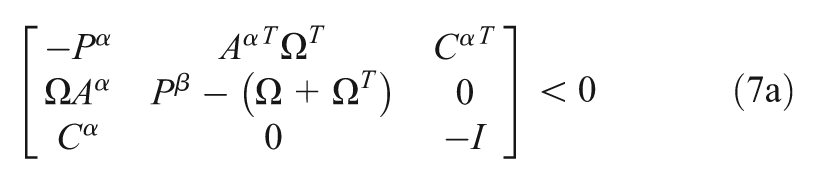
Theorem 1. Given a positive scalar , the H2 norm of 2D system G in form (1) with zero boundary condition is bounded by under arbitrary switching sequences, if there exist a block-diagonal matrix , symmetric block-diagonal matrices with , and matrix such that
Proof. Choose the following Lyapunov functional candidate
where
We introduce
Assume that the th subsystem is activated at , . When there is no switch occurring at , the increment can be computed as follows:
It follows from (7a) that the th subsystem is stable.
When system (1) is switched to the th subsystem from the th subsystem at i+j+1, the increment can be obtained as follows
From (7a), we have
Then the value of Lyapunov function is decreasing at the switching instants.
Therefore, one can see that the 2D switched system (1) is asymptotically stable.
From (8), one obtains
where
Noting that , for any positive scalars ,, we have
The zero boundary condition together with (11) implies
On the other hand, it can be derived from (5) that
By using (6), (12) and (13), we can express the square of the H2 norm of the 2D system G as
It follows immediately that if the following conditions are satisfied.
Now we introduce a symmetric matrix Z, then the inequalities in (14b) are equivalent to
By Lemma 1, we get the following conditions
Consider that is invertible. Using and to pre- and post-multiply (16a) and (16b), respectively, one obtains
The inequality implies that , so we can obtain that (17) holds if (7) is satisfied, which implies that 2D switched system (1) is asymptotically stable with H2 norm bound .
This completes the proof.
Remark 4. In Theorem 1, we propose a sufficient condition for the existence of asymptotical stability and H2 performance for the considered 2D switched system (1). It is worth noting that this condition is obtained by using the multiple Lyapunov function approach, and it also can be applied to the general 2D Roesser models when N=1.
H2 control problem
Consider the following discrete 2D switched plant in the Roesser model:
where , , , , , are, respectively, the horizontal state, the vertical state, disturbance input, control input, controlled output and measurement output of the plant, , , , , , , , , , , are real matrices with appropriate dimensions. We make no assumption on the statistics of the disturbance input signal other than that it is energy bounded, i.e. . Without loss of generality, we assume for any .
Introduce the following th order 2D switched dynamic output feedback controller for the plant
where , , , , and . Note that the controller order is not necessarily the same as the plant order .
By introducing the elementary matrix as
and noting that , the closed-loop system of the plant (18) and the controller (19) is of the form
where
Now, we are in a position to present a sufficient condition for the existence of a mode-dependent dynamic output feedback controller for system (18) such that the resulting closed-loop system (20) is asymptotically stable with H2 norm bound based on Theorem 1. The controller design procedure is provided in the following theorem.
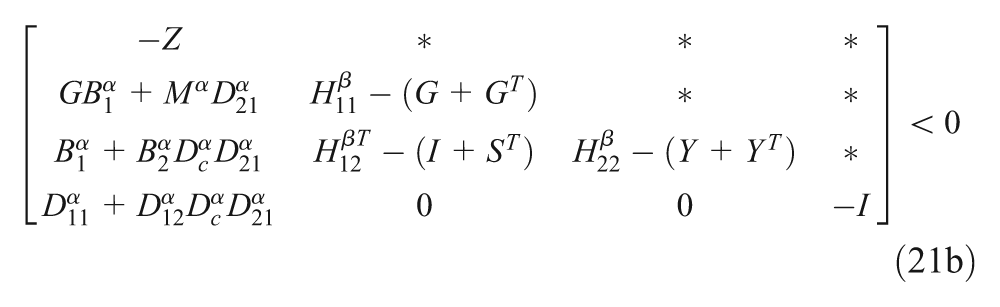
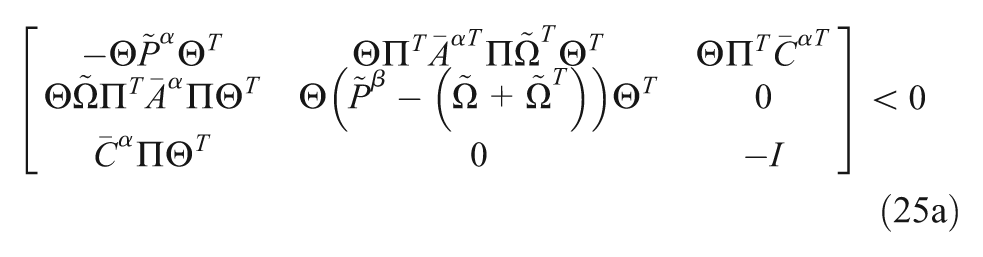
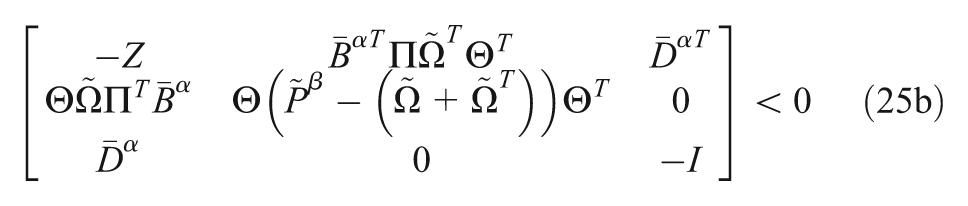
Theorem 2. Consider system (18), for a given constant , a dynamic output feedback controller (19) can be designed such that the resulting closed-loop system (20) is asymptotically stable with H2 norm bound under arbitrary switching sequences, if there exist block-diagonal matrices , , , , , and matrices , , , , of appropriate dimensions with , such that
with
Moreover, if (21) has a feasible solution, the controller parameters can be constructed as
Proof. By Theorem 1, the closed-loop system (20) is asymptotically stable with H2 norm bound under arbitrary switching sequences, if there exist a matrix , block-diagonal matrices , , , such that
hold, where and . Pre- and post- multiplying (23a) by and , and pre- and post- multiplying (23b) by and , one obtains
with
Observe that . Hence, is invertible. Denote
and
In view of with being block-diagonal, it is easy to verify that the matrices , , , are also block-diagonal. Pre- and post- multiply (24a) by and , and pre- and post- multiply (24b) by and , we can obtain
where
with
We can obtain the result of the theorem by letting
It can be seen from (21a) that
which implies that matrices G and Y are non-singular. Using and its transpose to pre- and post-multiply (27), one obtains
which implies that is also non-singular, hence there exist non-singular block-diagonal matrices U and V such that
Thus, a solution to the controller in the form (19) can be obtained from the solution to the LMI (21). This completes the proof.
Remark 5. It is worth noting that in Theorems 1 and 2, the results are derived under the assumption that the switching rule is not known a priori but its value is available in each sampling period. In other words, the switching sequence considered here does not include the random switching one.
Remark 6. We would like to stress that the H2 control problem of 2D discrete switched systems is first considered in the paper. Although some results on H2 control and filtering problems for 2D systems have been obtained (Tuan et al., 2002; Yang et al., 2006), the existing methods proposed in these papers cannot be directly applied to 2D switched systems. In Theorem 2, a dynamic output feedback controller design scheme is proposed to solve the H2 control problem for such systems, and the designed controller gains are mode-dependent, which is different from the existing ones.
Remark 7. In the proof of Theorem 2, the technique of change of variables has been used to transform the non-linear matrix inequalities (24a)–(24b) to LMIs (21a)–(21b) such that the H2 control problem can be solved via the LMI technique.
In what follows, we present an algorithm for the design of dynamic output controller.
Algorithm 1
Step 1. Given a , solve the LMIs (21a)–(21c) to obtain matrices , , , , , , , , , and the dynamic output feedback controller parameters with .
Step 2. The invertible matrices and can be computed by (21d).
Step 3. The rest of the controller parameters can be obtained by (22).
Numerical example
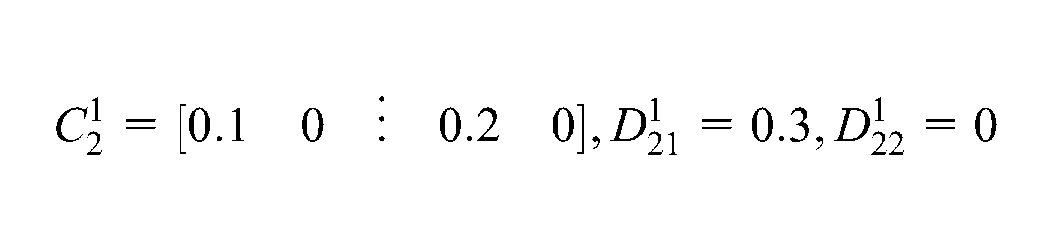
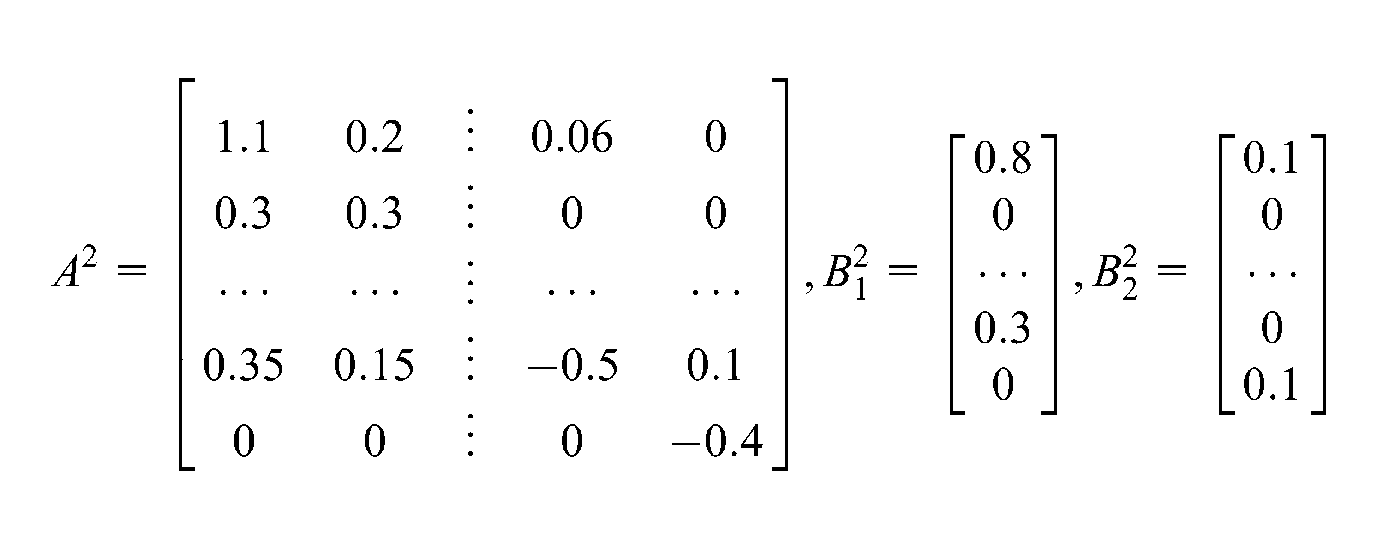
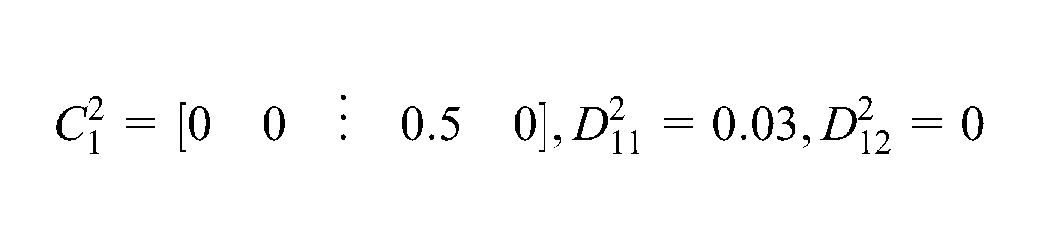
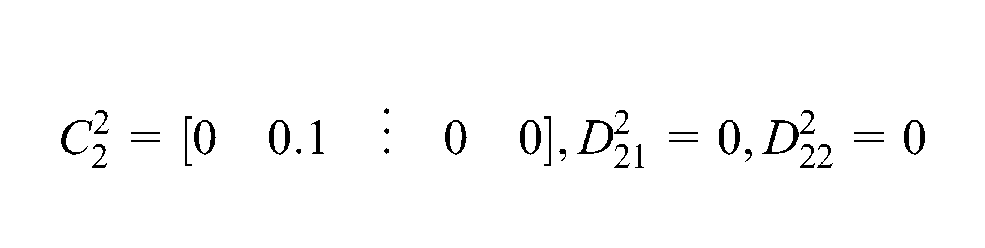
In this section, we shall illustrate the results developed earlier via an example. All simulations are performed with LMI control toolbox (Gahinet et al., 1995). Consider the following 2D switched system of type (18) with two subsystems:
Subsystem 1
Subsystem 2
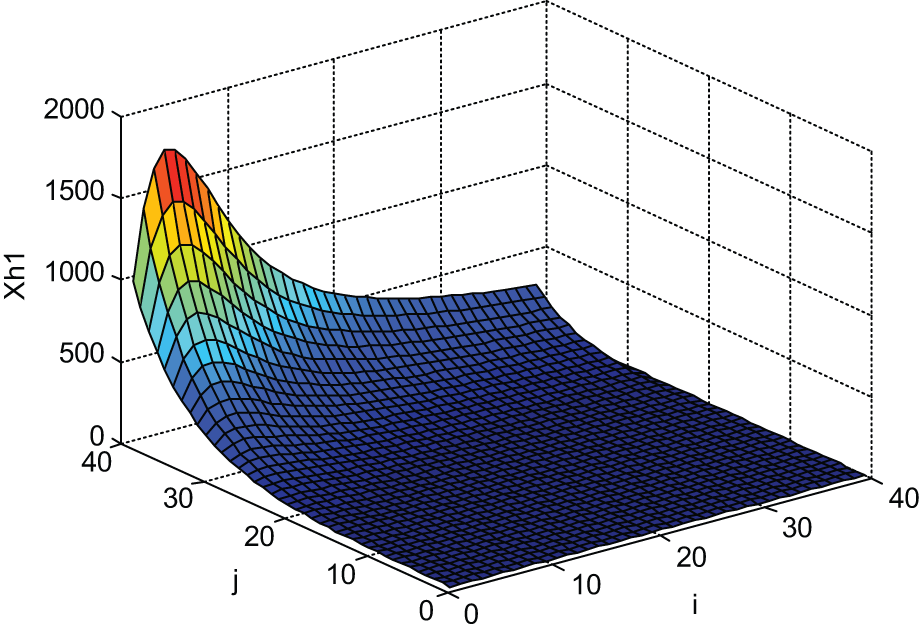
Note that the uncontrolled subsystem 2 is not stable and Figure 1 displays one of its state responses.
Response of state for uncontrolled subsystem 2.
Our purpose is to design a 2D switched dynamic output-feedback controller such that the resulting closed-loop system is asymptotically stable with an H2 norm bound .
Step 1. Taking , solving LMIs (21a)–(21c) yields
Step 2. The invertible matrices and can be computed by (21d).
Step 3. The rest of the controller parameters , and , , can be obtained by (22).
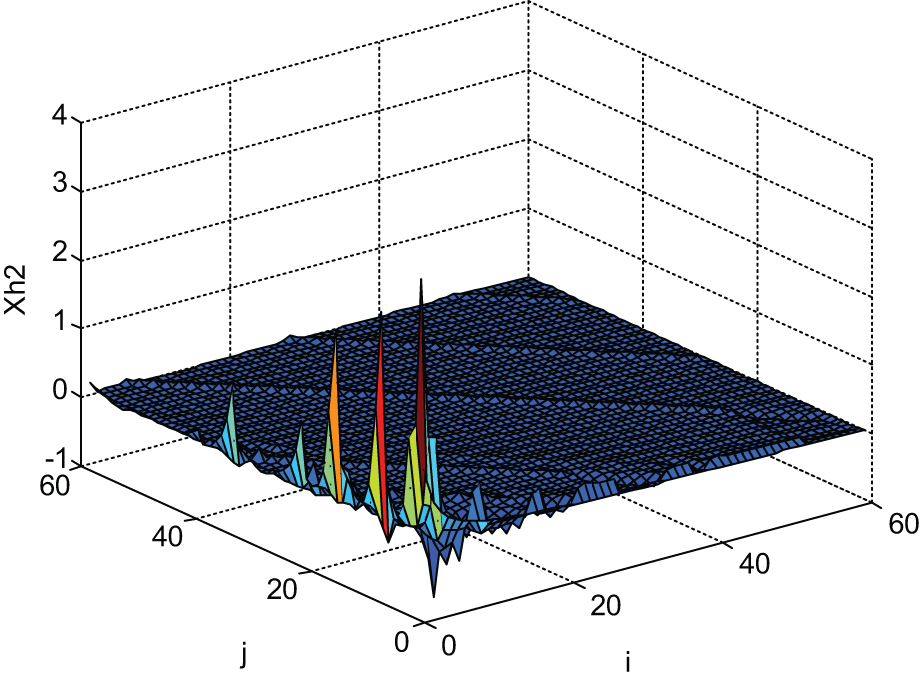
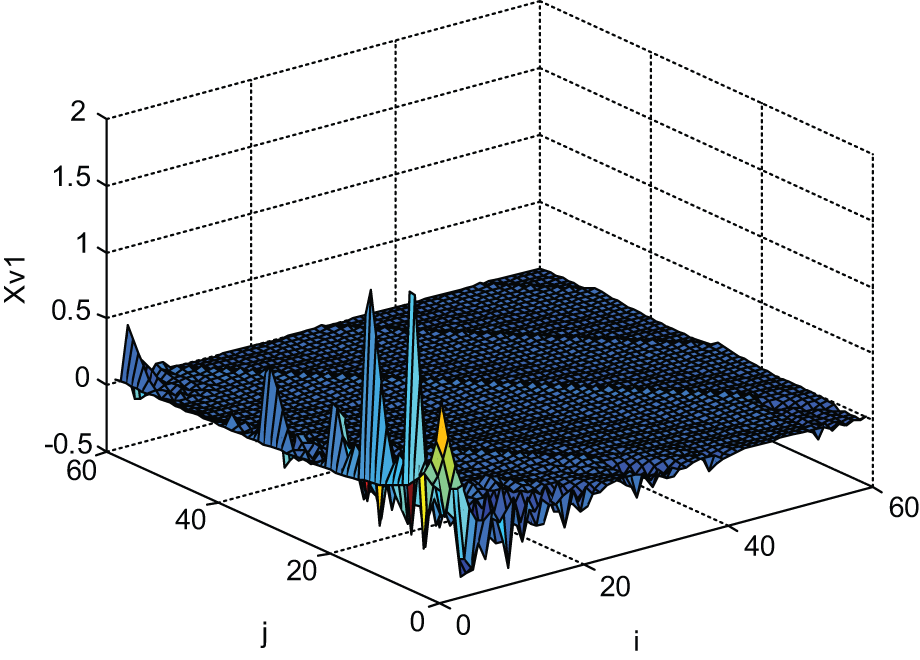
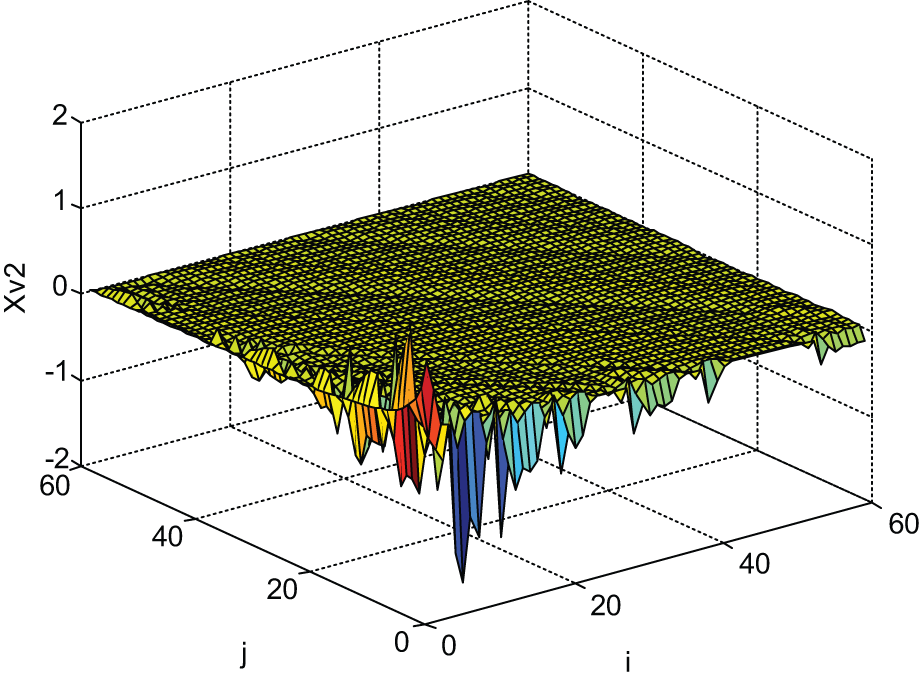
The trajectories of states , , , are shown in Figures 2–5, where the external signal is , and the boundary condition of the system is
Response of state .
Response of state .
Response of state .
Response of state .
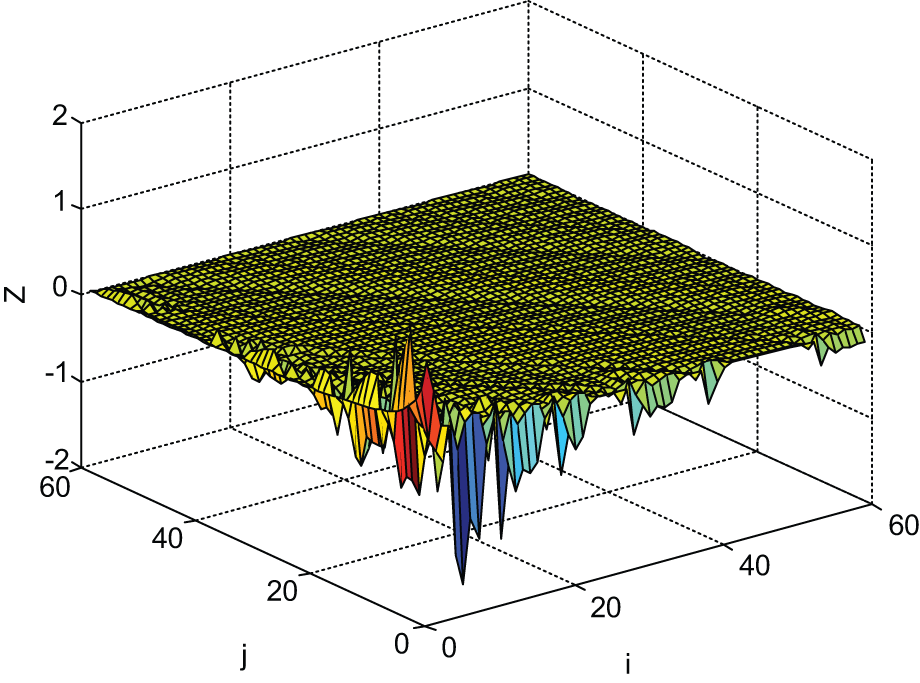
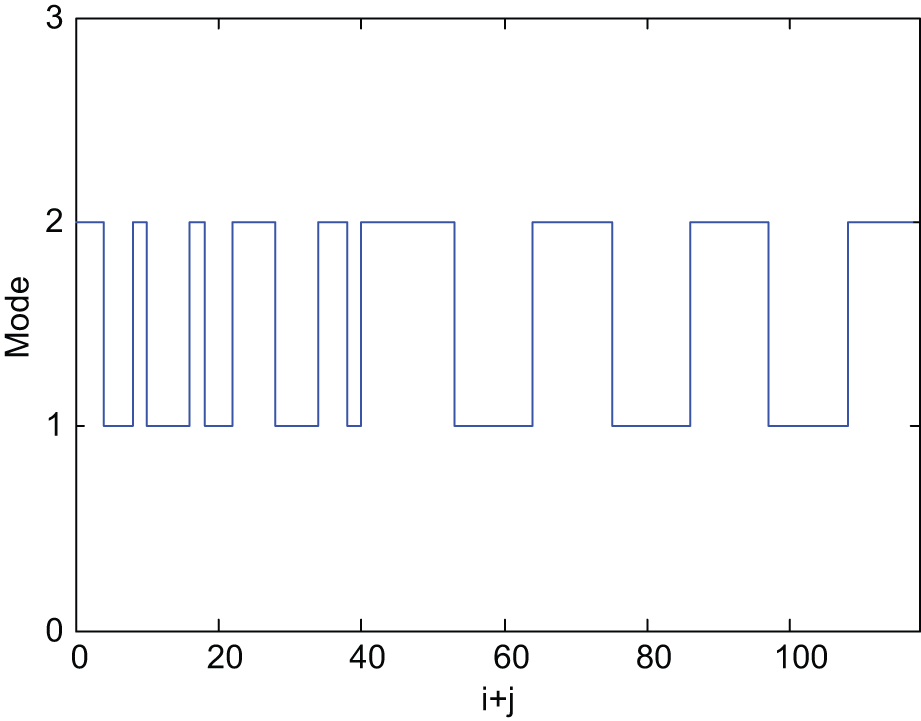
The control output sequence is displayed in Figure 6 and the switching sequence is plotted in Figure 7. It is quite evident that the simulation results are satisfactory, which demonstrates the effectiveness of the proposed method.
Controlled output trajectory.
Switching signal.
Conclusions
The H2 output feedback control problem for discrete-time 2D switched systems has been investigated. A sufficient condition based on the multiple Lyapunov function method has been established to guarantee the asymptotic stability and H2 performance. An H2 dynamic output feedback controller design scheme for such systems has been developed based on the condition. A numerical example is given to demonstrate the applicability of the proposed approach. The future work will be associated with the following directions: 1) dealing with the same problem for more general systems within the similar framework; and 2) considering H2 output feedback control problem for discrete-time 2D switched systems with and without state delays.
Footnotes
Funding
This work was supported by the National Natural Science Foundation of China under grants nos. 60974027 and 61273120.
References
1.
BalluchiABenedettoMDPinelloC. (1997) Cut-off in engine control: a hybrid system approach. Proceedings of 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 10–12 December, 5: pp. 4720–4725.
2.
BenzaouiaAHmamedATadeoF. (2011) Stabilization of discrete 2-D time switched systems by state feedback control. International Journal of Systems Science42(3): 479–487.
3.
BishopBESpongMW (1998) Control of redundant manipulators using logic-based switching. Proceedings of 37th IEEE Conference on Decision and Control, Tampa, FL, USA, 16–18 December, 2: pp. 1488–1493.
4.
BoydS PGhaouiL EFeronE. (1994) Linear matrix inequalities in system and control theory. Philadelphia, PA: SIAM.
5.
BranickyM S (1998) Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Transactions on Automatic Control43(4): 475–482.
6.
Castillo-ToledoBGennaroSDLoukianovAG. (2008) Hybrid control of induction motors via sampled closed representations. IEEE Transactions on Industrial Electronics55(10): 3758–3771.
7.
DaafouzJBernussouJ (2001) Parameter dependent Lyapunov functions for discrete time systems with time varying parametric uncertainties. Systems and Control Letter43(5): 355–359.
8.
DuC LXieL H (2002) H∞ Control and Filtering of Two-dimensional Systems. Berlin: Springer-Verlag.
9.
DuDSZhouSSZhangBY (2006) H2 output feedback controller design for uncertain discrete-time switched systems via switched Lyapunov functions. Nonlinear Analysis: Theory, Methods & Applications65(11): 2135–2146.
10.
FengGSunD (2002) Generalized H2 controller synthesis of uncertain fuzzy dynamic systems based on piecewise Lyapunov functions. Proceedings of the 11th IEEE International Conference on Fuzzy Systems, Honolulu, HI, USA, 12–17 May, 1: pp. 215–220
11.
GahinetPNemirovskiiALaubAJ. (1995) LMI Control Toolbox User’s Guide. Natick, MA: Math Works.
12.
GaoCYDuanGRMengXY (2008) Robust H∞ filter design for 2-D discrete systems in Roesser model. International Journal of Automation and Computing5(4): 413–418.
13.
GaoHLamJWangC. (2004) Robust H∞ filtering for 2-D stochastic systems. Circuits, Systems, and Signal Processing23(6): 479–505.
14.
KaczorekT (1985) Two-dimensional Linear Systems. Berlin: Springer-Verlag.
LamJXuSYZhouY. (2004) Robust output feedback stabilization for two-dimensional continuous systems in Roesser form. Applied Mathematics Letters17(12): 1331–1341.
17.
LeeSKimTLimJ (2000) A new stability analysis of switched systems. Automatica36(6): 917–922.
18.
LiCLLongFCuiCZ (2008) Robust H∞ control for discrete-time switched linear systems subject to exponential uncertainty. International Conference on Intelligent Computation Technology and Automation, Hunan, China, 20–22 October, 1: pp. 455–459.
19.
LiXWGaoHJ (2012) Robust finite frequency H∞ filtering for uncertain 2-D Roesser systems. Automatica48(6): 1163–1170.
20.
LianJFengZShiP (2011) Observer design for switched recurrent neural networks: an average dwell time approach. IEEE Transaction on Neural Networks22(10): 1547–1556.
21.
LianJZhaoJDimirovskiGM (2010) Integral sliding mode control for a class of uncertain switched nonlinear systems. European Journal of Control16(1): 16–22.
22.
MahmoudMS (2009) Switched discrete-time systems with time-varying delays: a H2 approach. Computers & Mathematics with Applications57(1): 79–95.
23.
NarendraKSBalakrishnanJA (1994) Common Lyapunov function for stable LTI systems with commuting A-matrices. IEEE Transactions on Automatic Control39(12): 2469–2471.
24.
PaszkeWLamJGalkowskiK. (2004) Robust stability and stabilisation of 2-D discrete state-delayed systems. Systems and Control Letter 51(3–4): 277–291.
25.
RoteaMA (1993) The H2 control problem. Automatica29(2): 373–385.
26.
SongZYZhaoJ (2007) Observer-based robust H∞ control for uncertain switched systems. Journal of Control Theory and Applications5(3): 278–284.
27.
SreekumarCAgarwalV (2008) A hybrid control algorithm for voltage regulation in DC–DC boost converter. IEEE Transactions on Industrial Electronics55(6): 2530–2538.
28.
TuanHDApkarianPNguyenTQ. (2002) Robust mixed H2/H∞ filtering of 2-D systems. IEEE Transactions on Signal Processing50(7): 1759–1771.
29.
WangDWangWShiP (2011) Design on H∞ filtering for discrete-time switched delay systems. International Journal of Systems Science42(12): 1965–1973.
30.
XiangZRChenQW (2010) Robust reliable control for uncertain switched nonlinear systems with time delay under asynchronous switching. Applied Mathematics and Computation216(3): 800–811.
31.
XiangZRHuangSP (2013) Stability analysis and stabilization of discrete-time 2-D switched systems. Circuits, Systems, and Signal Processing32(1): 401–414.
32.
XieDWangLHaoF. (2004) An LMI approach to L2 gain analysis and control synthesis of switched systems. International Symposium on Computer Aided Control Systems Design, Taipei, Taiwan, 2–4 September, pp. 350–355.
33.
XuHLLinZPMakurA. (2011) Asymptotic unknown input observers for two-dimensional systems. 7th International Workshop on Multidimensional Systems, Poitiers, France, 5–7 September, pp. 1–5.
34.
XuHLZouY (2008) Reduced-order H∞ filtering for 2-D singular Roesser models. Proceeding of 27th Chinese Control Conference, Kunming China, 16–18 July, pp. 772–776.
35.
XuHLZouYLuJW. (2005) Robust H∞ control for a class of uncertain nonlinear two-dimensional systems with state delay. Journal of the Franklin Institute342(7): 877–891.
36.
XuLYamadaMLinZP. (2004) Further improvements on Bose’s 2-D stability test. International Journal of Control, Automation, and Systems2(3): 319–332.
37.
YangRXieLHZhangCS (2006) H2 and mixed H2/H∞ control of two-dimensional systems in Roesser model. Automatica42(9): 1507–1514.
38.
ZhangLXShiP (2009) Stability, l2-gain and asynchronous H∞ control of discrete-time switched systems with average dwell time. IEEE Transactions on Automatic Control54(9): 2192–2199.
39.
ZhangWBranickyMSPhillipsSM (2001) Stability of networked control systems. IEEE Control Systems Magazine21(1): 84–99.