In many areas of principal component analysis, biology, electricity, solid mechanics, automatics control theory and vibration theory, linear matrix equations can be encountered. The presented paper proposes first an iterative method for finding the generalized bisymmetric solution to the generalized coupled Sylvester matrix equations. Second, when the generalized coupled Sylvester matrix equations matrix are consistent, for any generalized bisymmetric initial iterative matrix pair, we can obtain the generalized bisymmetric solution within finite iterative steps in the absence of round-off errors. Furthermore, the optimal approximate generalized bisymmetric solution of the matrix equation for a given generalized bisymmetric matrix can be obtained by finding the least-norm generalized bisymmetric solution of new generalized coupled Sylvester matrix equations. Finally, numerical examples are presented to support the theoretical results of this paper.
Linear matrix equations play important roles in many areas of applied sciences for example in control system theory, biology, electricity, solid mechanics, automatic control theory and vibration theory. We first give some notations, which are used throughout the paper. The notations , , and represent the set of all real, real symmetric matrices, real symmetric orthogonal matrices and real generalized bisymmetric with respect to the generalized reflection matrix , respectively . We use and and to denote the transpose, the trace and the column space of the matrix , respectively. represents the operator of , i.e. for the matrix , and stands for the Kronecker product of the matrices and . Defining an inner product as then the norm of a matrix generated by this inner product is known as the Forbenius norm of and is denoted by (Datta, 2003; Golub and Van Loan, 1996).
For simplicity, we also introduce the following operators:
where and are arbitrary matrices of appropriate dimensions with real entries.
Definition 1. (Dehghan and Hajarian, 2010a). For an arbitrary given matrix , i.e. , an real matrix is said to be generalized bisymmetric matrix with respect to the generalized reflection matrix if , and is denoted by .
In this paper, we will consider the following four problems:
Problem 1. For given , , , and find matrix pair with and such that
Problem 2. When Problem 1 is consistent, let its solution pair set be denoted by . For a given matrix pair [] with and find matrix pair such that
In fact, Problem 2 is to find the optimal approximation solution to the given matrix pair [].
Problem 3. For given , and , find matrix pair with such that Equations (1) are satisfied.
Problem 4. When Problem 3 is consistent, let its solution pair set be denoted by . For a given matrix pair [] with find matrix pair such that
Notice that Problem 4 is to find the optimal approximation solution to the given matrix pair [].
An iterative method for a symmetric solution of the matrix equation is proposed by Peng et al. (2005) and the system of matrix equations bye Peng et al. (2006). The iterative solutions of the matrix equation and the generalized Sylvester matrix equation , by extending Jacobi and Gauss–Seidel iteration methods for , are obtained by Ding et al. (2008). Zhou and Duan (2006, 2007) presented the solution of several generalized Sylvester matrix equations, Monsalve M (2008), proposed block linear methods for large scale Sylvester matrix equations XA+BX = C. In addition, Zhou et al. (2009) proposed gradient-based iterative algorithms for solving the general coupled Sylvester matrix equations with weighted least squares solutions. Huang et al. (2008) proposed a new iterative method for the skew–symmetric solution of the matrix equation . In Li and Wu (2008), symmetric and skew–anti-symmetric solutions to the matrix equations over the real quaternion algebra H are presented. Wang et al. (2007) introduced an iterative algorithm for solving the matrix equation . Dehghan and Hajarian (2008a) proposed an iterative method for solving the pair of matrix equations and over generalized centro-symmetric matrices, finite iterative algorithms for the reflexive and anti-reflexive solutions of coupled Sylvester matrix equations (Dehghan and Hajarian, 2008b, 2009b, 2010a), and an iterative method for solving generalized coupled Sylvester matrix equations over generalized bisymmetric matrices (Dehghan and Hajarian, 2010b) . Dehghan and Hajarian (2009c, 2010c), proposed the necessary and sufficient conditions for the solvability of matrix equations
and
over the reflexive and anti-reflexive matrices, and obtained the general expression of the solutions for a solvable case. Also, Dehghan and Hajarian (2009a) proposed an efficient iterative method for solving the second-order Sylvester matrix equation
To solve (coupled) matrix equations, based on the iterative methods of matrix equations, Ding and Chen presented the hierarchical gradient iterative (HGI) algorithms for general matrix equations (Ding and Chen, 2005a; Ding et al., 2008) and hierarchical least squares iterative (HLSI) algorithms for general coupled matrix equations and generalized coupled Sylvester matrix equations (Ding and Chen, 2005a, 2005b). The HGI algorithms (Ding and Chen, 2005c; Ding et al., 2008) and HLSI algorithms (Ding and Chen, 2005d, 2006; Ding et al., 2008) for solving general (coupled) matrix equations are innovative and computationally efficient numerical algorithms, and were presented based on the hierarchical identification principle (Ding and Chen, 2005d, 2006), which considers the unknown matrix as the system parameter matrix to be identified.
This paper is organized as follows: in the next section, we propose an iterative algorithm and its properties for solving the generalized coupled Sylvester matrix equations (1). By using the proposed algorithm, we prove that for any initial matrix pair , a generalized solution can be obtained within finite iterative steps. Also the least Frobenius norm generalized solution pair can be obtained by choosing a special kind of initial matrix pair. Then, the optimal generalized solution pair of Problem 2 is derived by finding the least Frobenius norm generalized solution pair of the new generalized coupled Sylvester matrix equations. We also propose an iterative algorithm and its properties for solving the generalized coupled Sylvester matrix equations (1) but over generalized bisymmetric (symmetric) matrices. Furthermore, the optimal generalized bisymmetric (symmetric) solution pair of Problem 4 is also introduced. Finally, some numerical examples are given to illustrate the accuracy of the proposed algorithms.
We would like to comment that the matrix equation (1) is quite general and includes many matrix equations. Also, the novelty and the contribution of this work is that the four considered problems stated above are of more general forms for generalized coupled Sylvester matrix equations than most recent Sylvester matrix equations available in the literature. Such considered forms need some effort to study their solutions over generalized bisymmetric (symmetric) matrices.
An iterative algorithm for solving Problem 1
In this section, we construct an iterative algorithm for solving the generalized coupled Sylvester matrix equations (1). Then we introduce some basic properties of the iterative algorithm. Finally, we prove that the iteration will stop within finite steps.
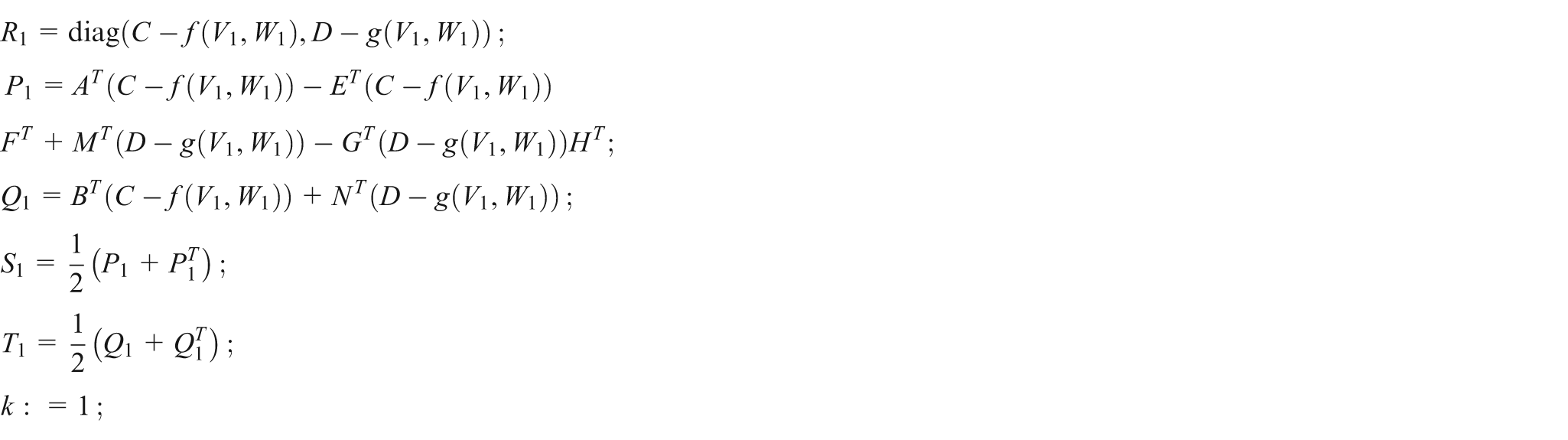
Algorithm 1
Step 1: Input matrices , , , , , , and matrix pair with and ;
Step 2: Compute
Step 3: If then stop and is the solution; else if but and then stop and the generalized coupled Sylvester matrix equations (1) are not consistent; else
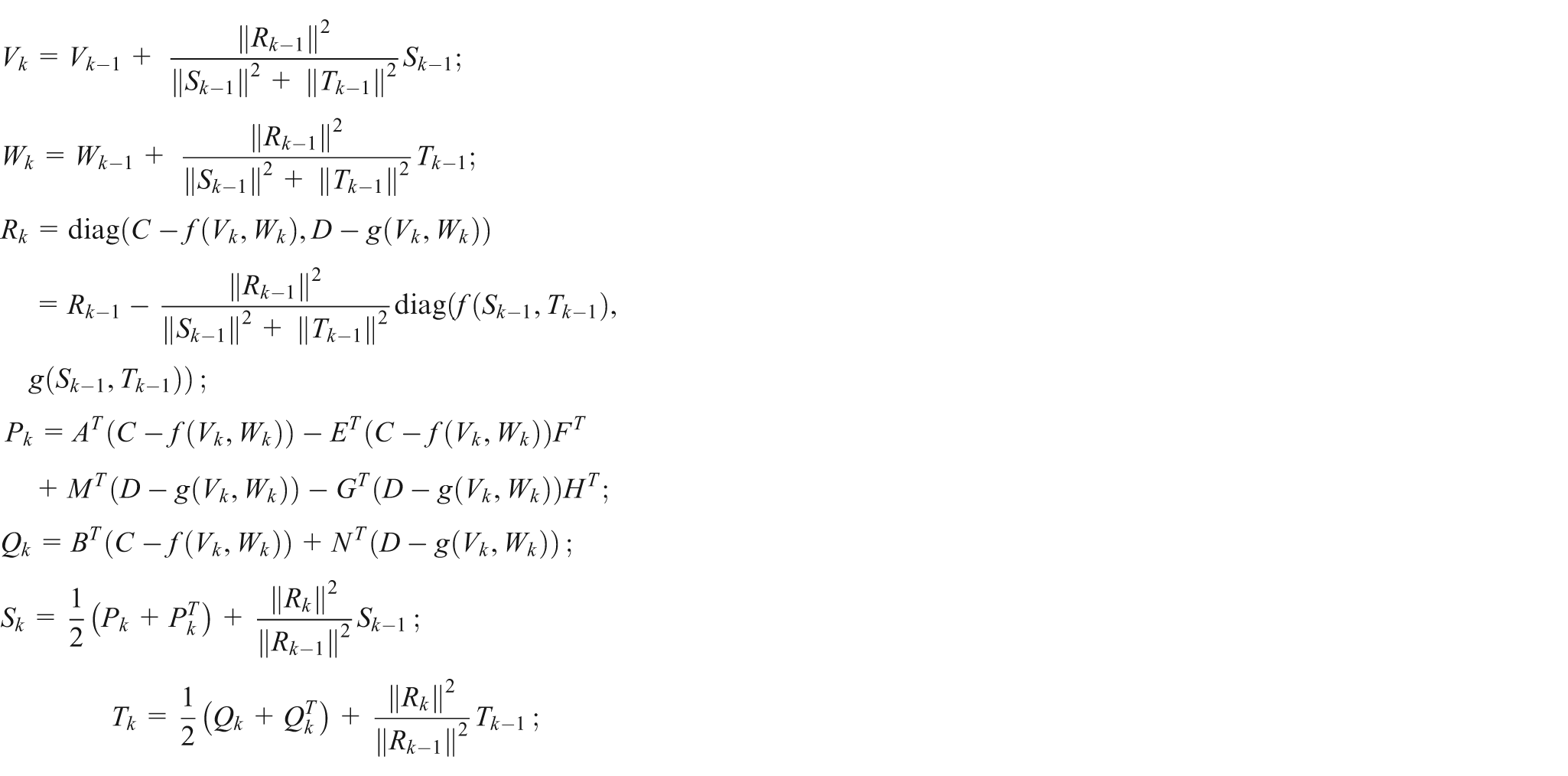
Step 4: Compute
Step 5: Go to step 3.
Remark 1. It is obvious from Algorithm 1 that and where .
Lemma 1. For the sequences and generated by Algorithm 1, we have
The proof of the Lemma 1 is presented in the Appendix.
Lemma 2. Suppose that Problem 1 is consistent, and [] is an arbitrary solution pair of it. Then for any initial generalized matrix pair with and , we have
where the sequences and are generated by Algorithm 1.
The proof of the Lemma 2 is also presented in the Appendix.
Remark 2. Obviously, from Lemma 2, if there exists a positive integer k, such that and but , we have that the matrix equations (1) are not consistent. Hence the solvability of the generalized coupled Sylvester matrix equations can be determined automatically by Algorithm 1 in the absence of round-off errors.
Theorem 1. Let Problem 1 be consistent, then for any arbitrary initial generalized matrix pair , with and , a generalized solution can be obtained within finite iterative steps in the absence of round-off errors.
Proof. Suppose that for From Lemma 2, we have or for then we can compute and by Algorithm 1. Also from Lemma 1, we can write
and
Therefore, the set is an orthogonal basis of the subspace of the matrix space . Hence and is a generalized solution of Problem 1. Therefore, the proof is completed.
Now, to obtain the least Forbenius norm solution of the generalized solution pair of Problem 1, we first present the following lemma.
Lemma 3. (Peng et al., 2006). Assume that the consistent system of linear equations has a solution , and then is a unique least Forbenius norm solution of the system of linear equations.
Obviously, the generalized coupled Sylvester matrix equations (1) is equivalent to
Now suppose and are arbitrary matrices, then we have
Obviously, if we consider
then all and obtained by Algorithm 1 satisfy
Hence by Lemma 3, with the initial generalized matrices (9) and (10) where and are arbitrary, or especially, and , then generalized solution pair [] obtained by Algorithm 1 is the least Frobenius norm solution pair of equations (1).
From the above conclusion, we present the following theorem.
Theorem 2. Assume that Problem 1 is consistent. If we take the initial generalized matrices (9) and (10) where and are arbitrary, or especially, and , then generalized solution pair [] generated by Algorithm 1 is the least Frobenius norm generalized solution pair of Equations (1).
The solution of Problem 2
In this section, we show that the optimal approximation solution of Problem 2 for a given generalized matrix can be obtained by finding the least Frobenius norm generalized solution of new generalized coupled Sylvester matrix equations.
Suppose that Problem 1 is consistent. Obviously the solution pair set of Problem 1 is not empty, then for a given generalized matrix pair [] with and , we can get
Let then the matrix nearness Problem 2 is equivalent to first finding the least Frobenius norm generalized solution pair of the generalized coupled Sylvester matrix equations
which can be obtained by Algorithm 1, and initial matrix pair with
where and are arbitrary, or especially, and . Once the matrix pair is obtained, the solution of the nearness Problem 2 can be represented as
An iterative algorithm for solving Problem 3
In this part, we construct an iterative method for solving the generalized coupled Sylvester matrix equations (1) over generalized bisymmetric matrices. Then we introduce some basic properties of the iterative method. Finally, we prove that the iteration will stop within finite steps.
Algorithm 2
Step 1: Input matrices , , , and ;
Step 2: Compute
Step 3: If then stop and is the solution; else if but and then stop and the generalized coupled Sylvester matrix equations (1) are not consistent over generalized bisymmetric matrices; else ;
Step 4: Compute
Step 5: Go to step 3.
Remark 3. Obviously, from Algorithm 2 we have and where
Lemma 4. Suppose that the sequences and generated by the Algorithm 2, then we have
The proof of the Lemma 4 is presented in the Appendix.
Lemma 5. Assume that Problem 3 is consistent, and [] is an arbitrary solution pair of Problem 3. Then for any initial generalized bisymmetric matrix pair with and
where the sequences and , are obtained by Algorithm 2.
The proof of the Lemma 4 is also presented in the Appendix.
Remark 4. Lemma 5 implies that if there exists a positive integer k, such that and but , then the generalized coupled Sylvester matrix equations (1) are inconsistent over generalized bisymmetric pair . Hence, the solvability of the matrix equations (1) over generalized bisymmetric pair can be determined automatically by Algorithm 2 in the absence of round-off errors.
Theorem 3. Suppose that Problem 3 is consistent, then for any arbitrary initial generalized bisymmetric matrix pair , with and , a generalized bisymmetric solution can be obtained within a finite iterative steps by Algorithm 2 in the absence of round-off errors.
Proof. Assume that for From Lemma 5, we have or for . Therefore we can calculate and by Algorithm 2. Also from Lemma 4, we have
and
Hence the set is an orthogonal basis of the subspace of the matrix space , which implies that , i.e. is a generalized bisymmetric solution of Problem 3. Therefore, the proof is completed.
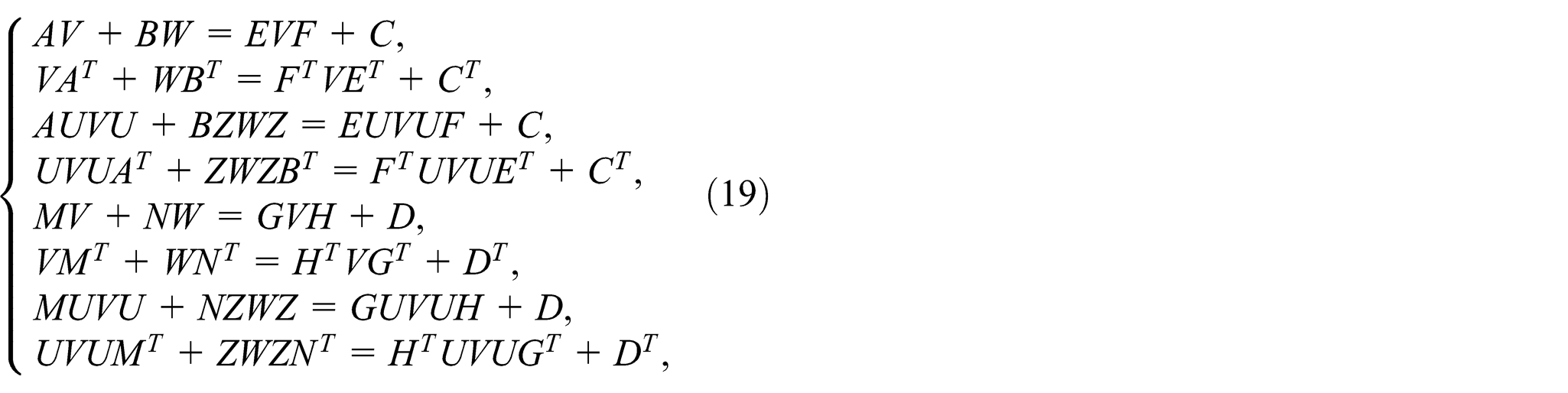
Lemma 6. A necessary and sufficient condition for the generalized coupled Sylvester matrix equations (1) to have a generalized bisymmetric solution is that the following matrix equations
are consistent.
Proof. First, we assume that the generalized coupled Sylvester matrix equations (1) have a generalized bisymmetric solution pair [].
By , and
we can obtain
and
That is, the generalized bisymmetric solution pair [] is a solution pair of the matrix equations (19).
Conversely, assume that the matrix equations (19) are consistent. Let be a solution pair of the matrix equations (19).
Let .
Hence and
and similarly
Hence, is a generalized bisymmetric solution pair of the generalized coupled Sylvester matrix equations (1). Therefore, the proof is completed.
To obtain least Frobenius norm solution of the generalized bisymmetric solution pair of Problem 3, obviously, from Lemma 6, the solvability of the matrix equations (19) is equivalent to the solvability of Problem 3. In addition, the system of matrix equations (19) is equivalent to
Now, suppose that and are arbitrary matrices, then we having
It is obvious that if we consider
then all and generated by Algorithm 2 satisfy
Hence, considering Lemma 3, with the initial generalized bisymmetric matrices (25) and (26) where and are arbitrary, or especially, and , the generalized bisymmetric solution pair [] generated by Algorithm 2 is the least Frobenius norm bisymmetric solution pair.
From the above conclusion, we present the following theorem.
Theorem 4. Suppose that Problem 3 is consistent, if we take the initial generalized bisymmetric matrices (25) and (26), where and are arbitrary, or especially, and , then generalized bisymmetric solution pair [] generated by Algorithm 2 is the least Frobenius norm generalized bisymmetric solution pair.
Remark 5. We know that the identity matrix I is a symmetric orthogonal matrix, because using Algorithm 2 we can obtain a symmetric solution pair of the generalized coupled Sylvester matrix equations (1) by putting .
In the symmetric case, we can obtain the following algorithm.
Algorithm 3
Step 1: Input matrices , , , and
Step 2: Compute
Step 3: If then stop and is the solution; else if but and then stop and the generalized coupled Sylvester matrix equations (1) are not consistent over symmetric matrices; else
;
Step 4: Compute
Step 5: Go to step 3.
We can also obtain the following notes in the symmetric case:
A necessary and sufficient condition that the generalized coupled Sylvester matrix equations (1) have a generalized symmetric solution is that the following matrix equations
are consistent.
To obtain the least Frobenius norm solution of the generalized symmetric solution pair of Problem 3, it is obvious that the system matrix equations (27) are equivalent to
Now, if we consider
where and are arbitrary, then all and generated by Algorithm 3 satisfy
Hence by Lemma 3, with the initial generalized symmetric matrices (29) and (30) where and are arbitrary, or especially, and , the generalized symmetric solution pair [] obtained by Algorithm 3 is the least Frobenius norm symmetric solution pair.
The solution of Problem 4
In this section, we show that the optimal approximation solution of Problem 4 for a given generalized bisymmetric matrix can be derived by finding the least Frobenius norm generalized bisymmetric solution of new generalized coupled Sylvester matrix equations.
Let Problem 3 be consistent. Thus the solution pair set of Problem 3 is non-empty; then for a given generalized bisymmetric matrix pair with and we have
Set then the matrix nearness Problem 4 is equivalent to first finding the least Frobenius norm generalized bisymmetric solution pair of the generalized coupled Sylvester matrix equations
by using Algorithm 2 and initial matrix pair with
where and are arbitrary, or especially, and . Then the bisymmetric solution pair of the nearness Problem 4 can be expressed from the following relation
Remark 6. In the symmetric case for a given generalized symmetric matrix pair with and we can obtain the optimal approximation solution by finding the least Frobenius norm generalized symmetric pair of the new generalized coupled Sylvester matrix equations.
where
by applying Algorithm 3 and letting the initial pair with
where and are arbitrary, or especially, and . The symmetric solution of the nearness Problem of this case can be computed as follows
Numerical examples
In this section, numerical examples are given to illustrate the accuracy of the proposed algorithms.
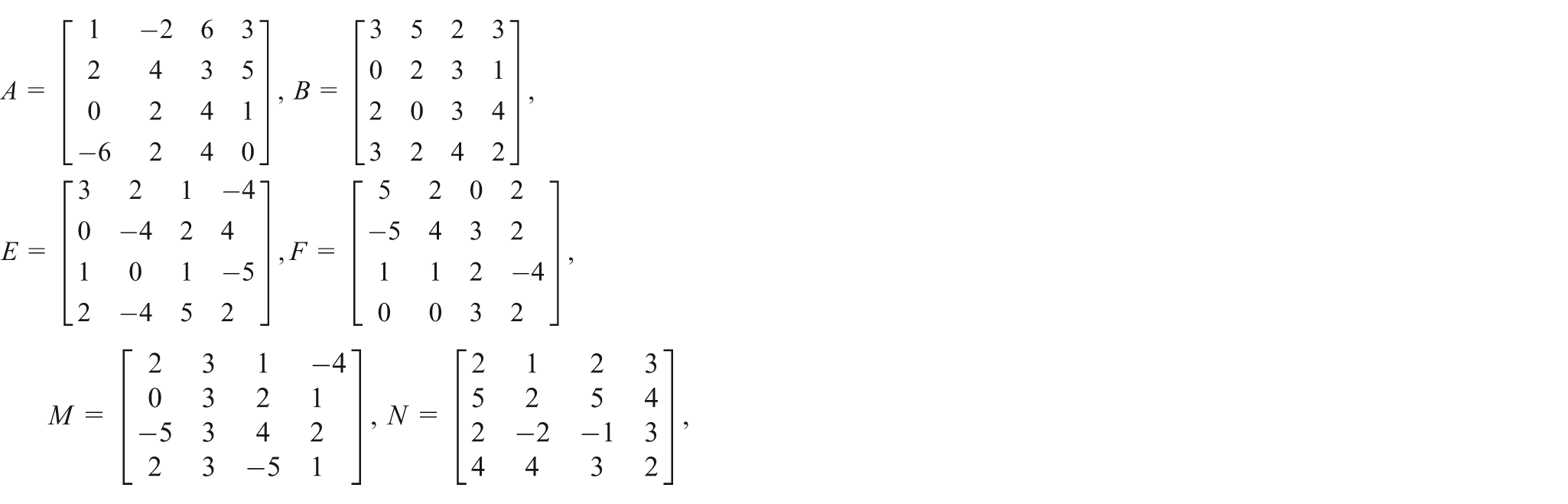
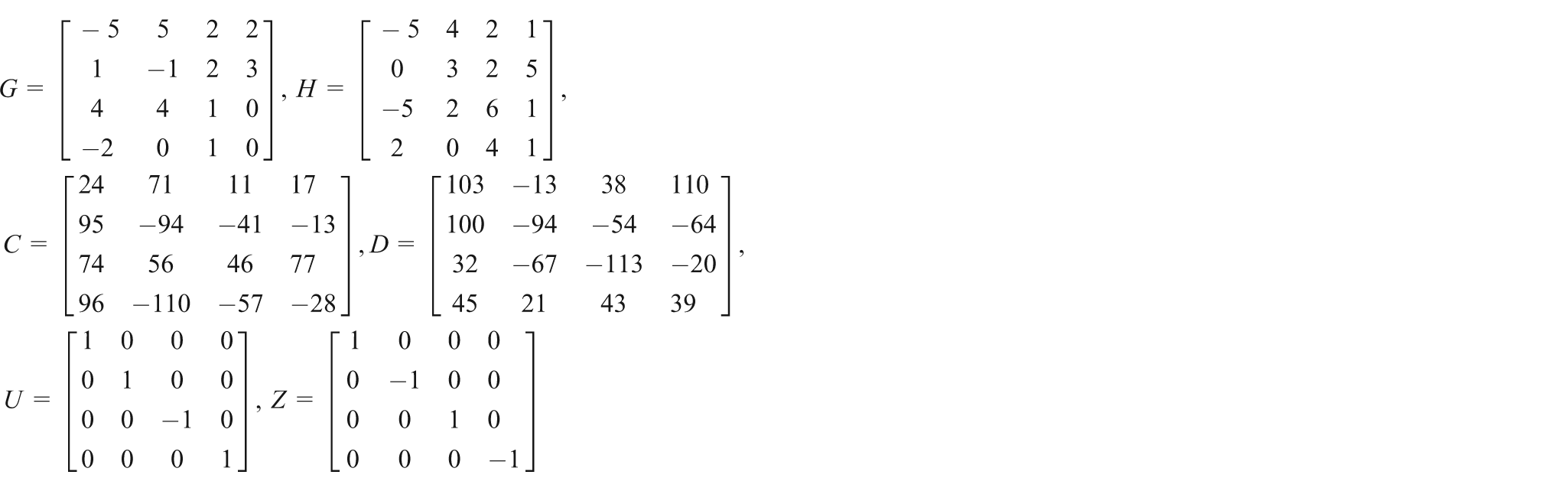
Example 1
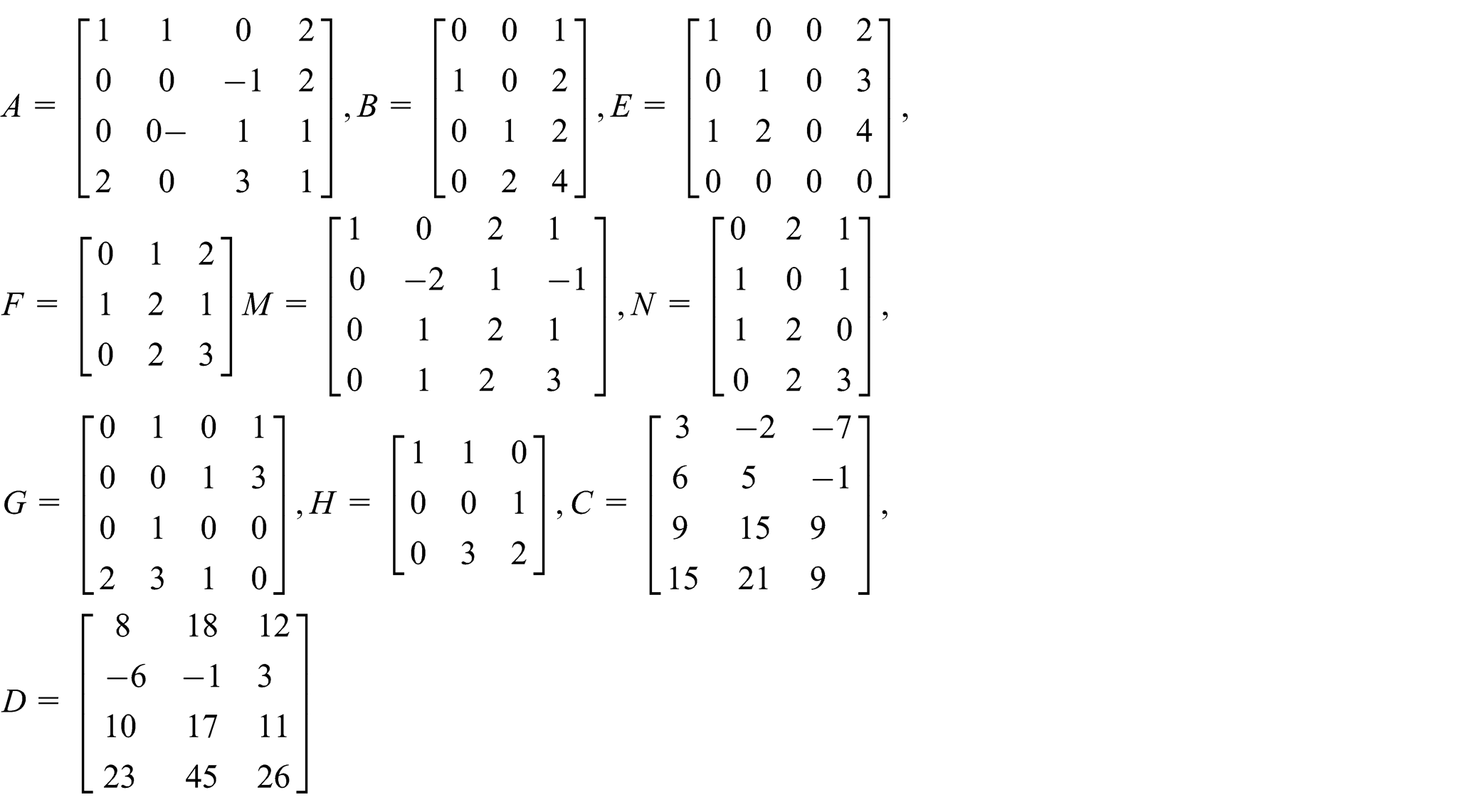
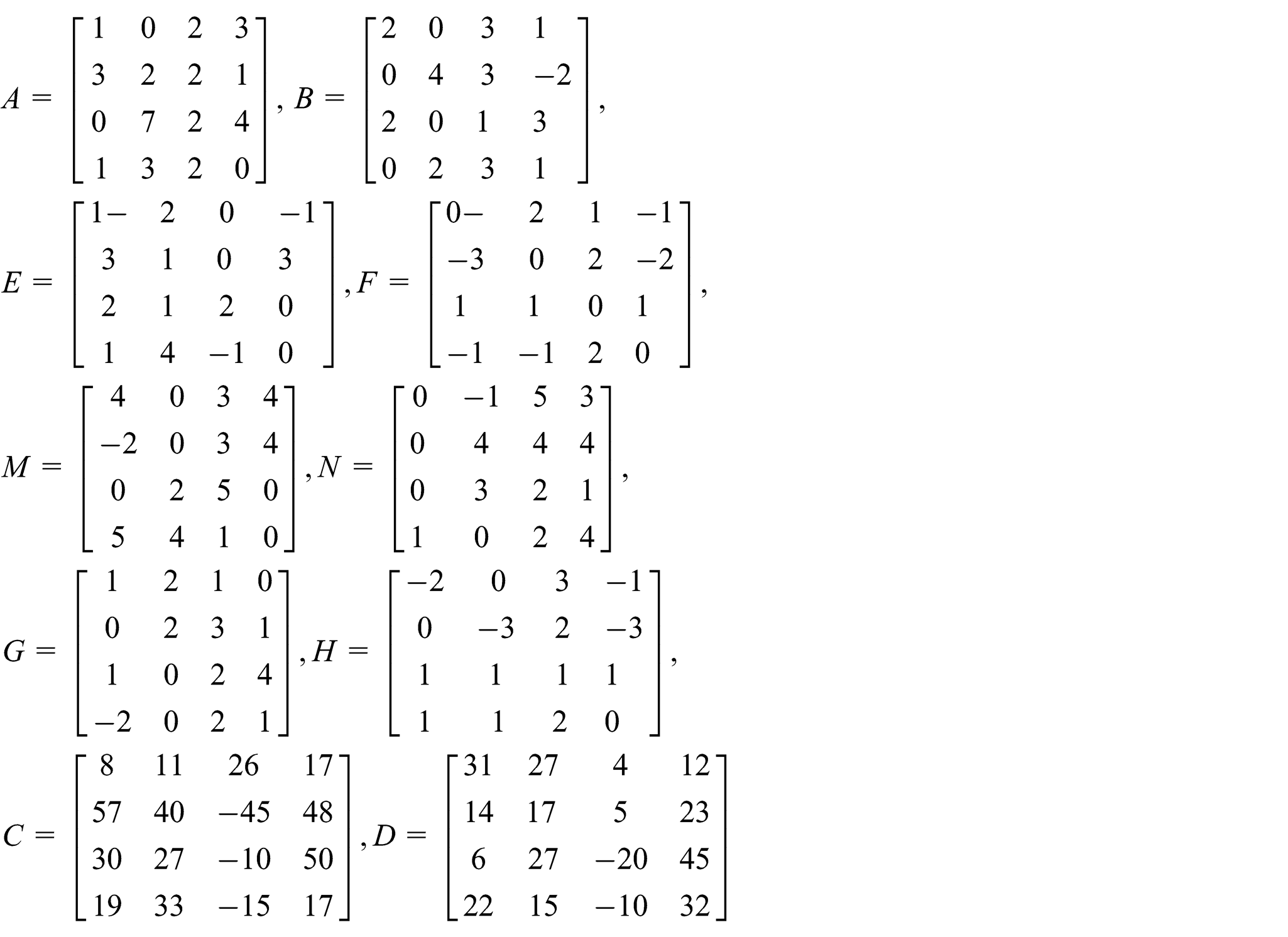
Consider the generalized coupled Sylvester matrix equations (1) where the matrices and are given as follows
It can be verified that the matrix equations (1) are consistent and their solutions are as follows:
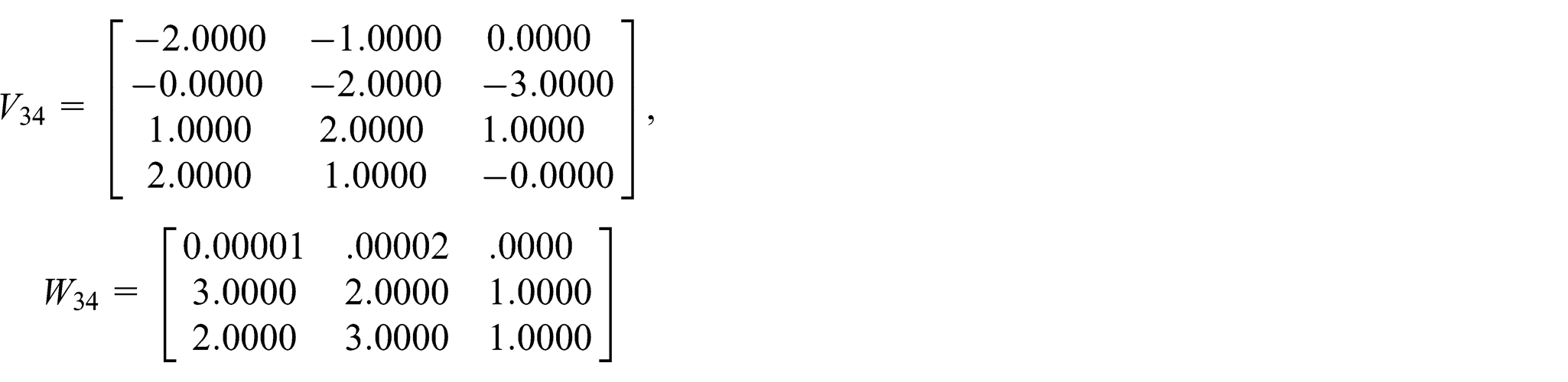
To find the matrix pair with and such that Equations (1) are satisfied, we let the initial matrices and , then applying Algorithm 1, we obtain the solutions as follows
with the corresponding residual
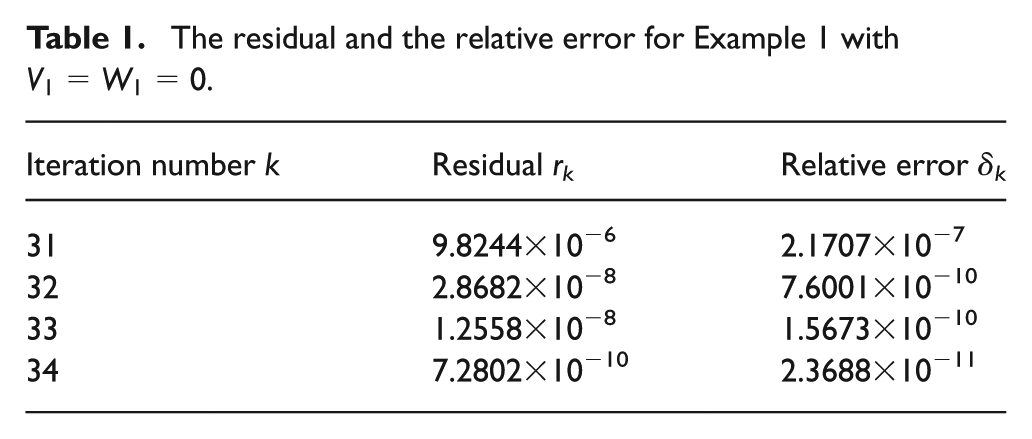
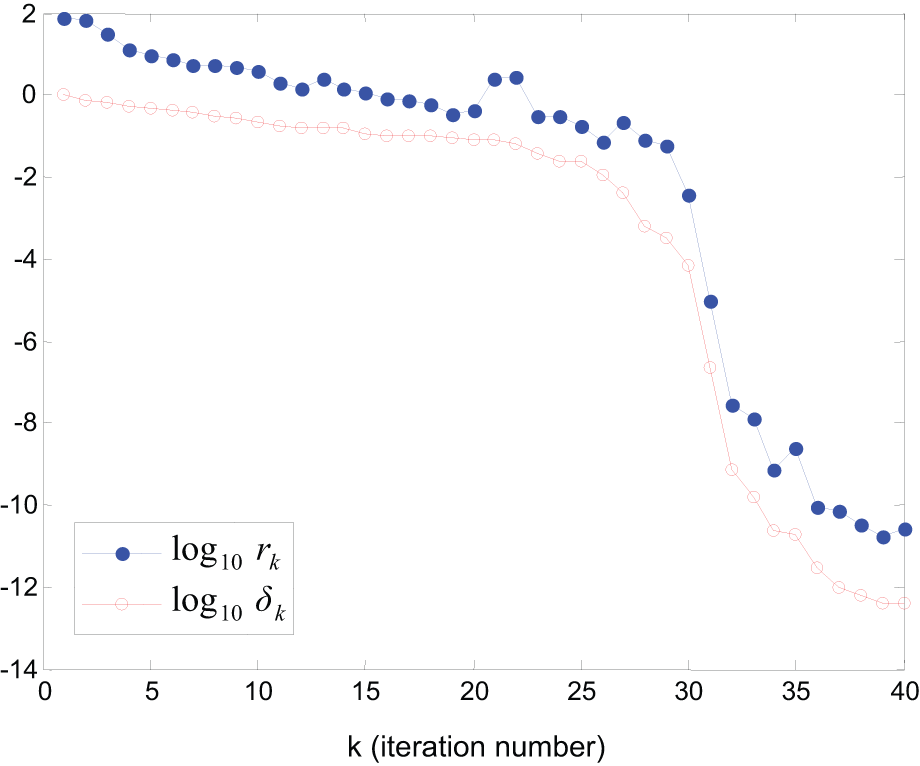
The obtained results are presented in Table 1 and Figure 1, where (relative error) and (residual).
The residual and the relative error for Example 1 with .
Iteration number k
Residual rk
Relative error δk
31
9.8244×10−6
2.1707×10−7
32
2.8682×10−8
7.6001×10−10
33
1.2558×10−8
1.5673×10−10
34
7.2802×10−10
2.3688×10−11
The residual and the relative error for Example 1 with .
Now let
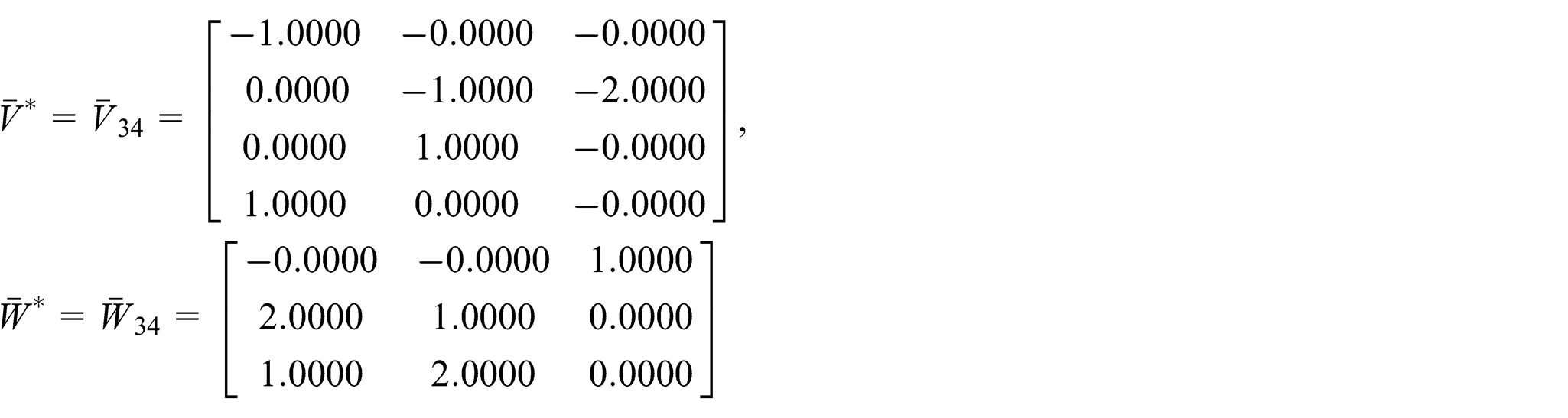
By applying Algorithm 1 for the generalized coupled Sylvester matrix equations (11), and letting the initial pair , we can obtain the least Frobenius norm generalized solution pair of the generalized coupled Sylvester matrix equations (11) as follows
with the corresponding residual
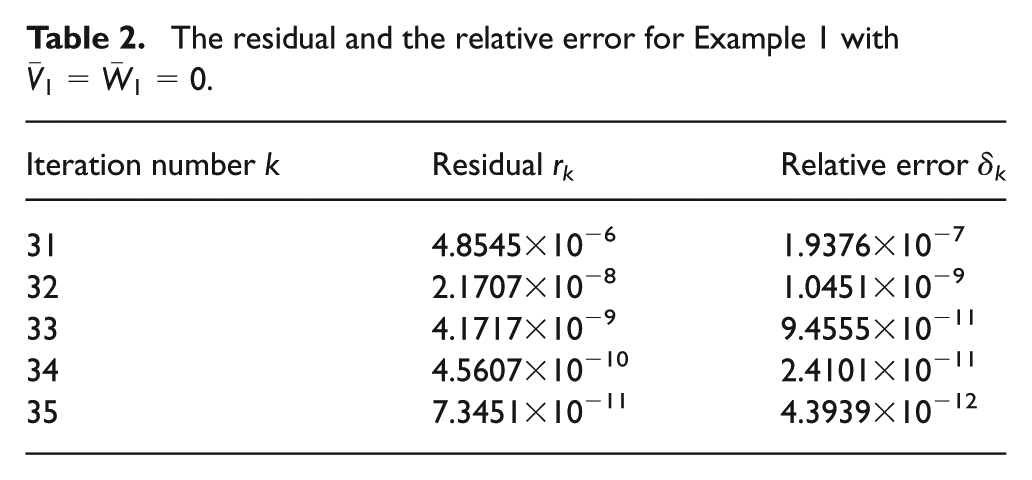
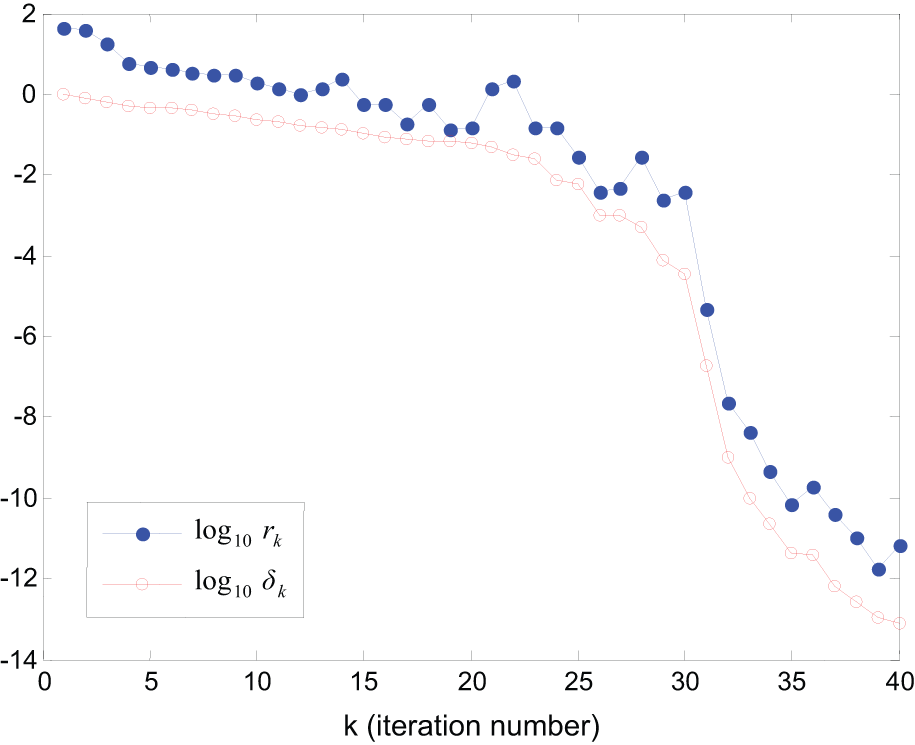
The values of the residual and the relative error are shown in Table 2 and Figure 2.
The residual and the relative error for Example 1 with .
Iteration number k
Residual rk
Relative error δk
31
4.8545×10−6
1.9376×10−7
32
2.1707×10−8
1.0451×10−9
33
4.1717×10−9
9.4555×10−11
34
4.5607×10−10
2.4101×10−11
35
7.3451×10−11
4.3939×10−12
The residual and the relative error for Example 1 with .
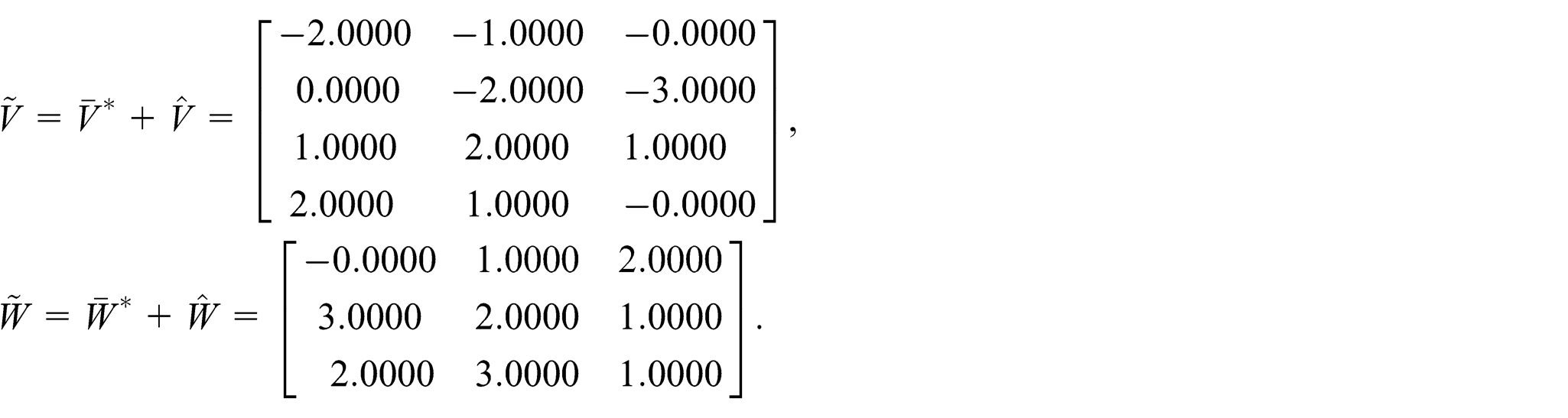
Once the matrix pair is obtained, the solution of the nearness Problem 2 can be computed from the following relations
with the corresponding residual
Example 2. For a symmetric case
Consider the generalized coupled Sylvester matrix equations (1) where
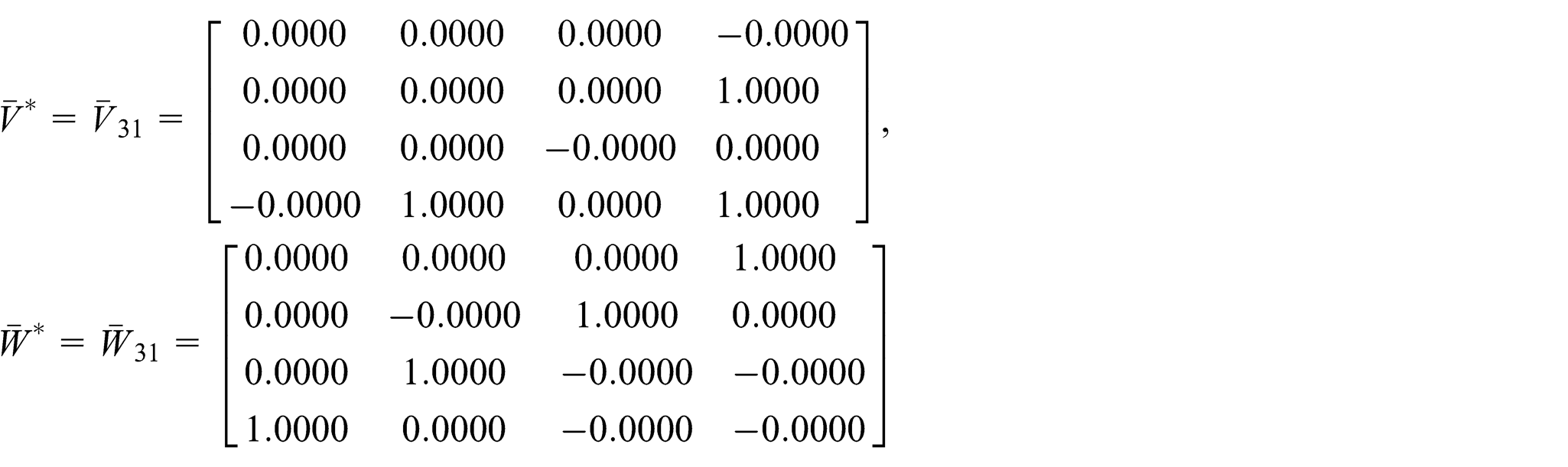
It can be verified that the matrix equations (1) are consistent over symmetric matrices and their symmetric solutions are as follows:
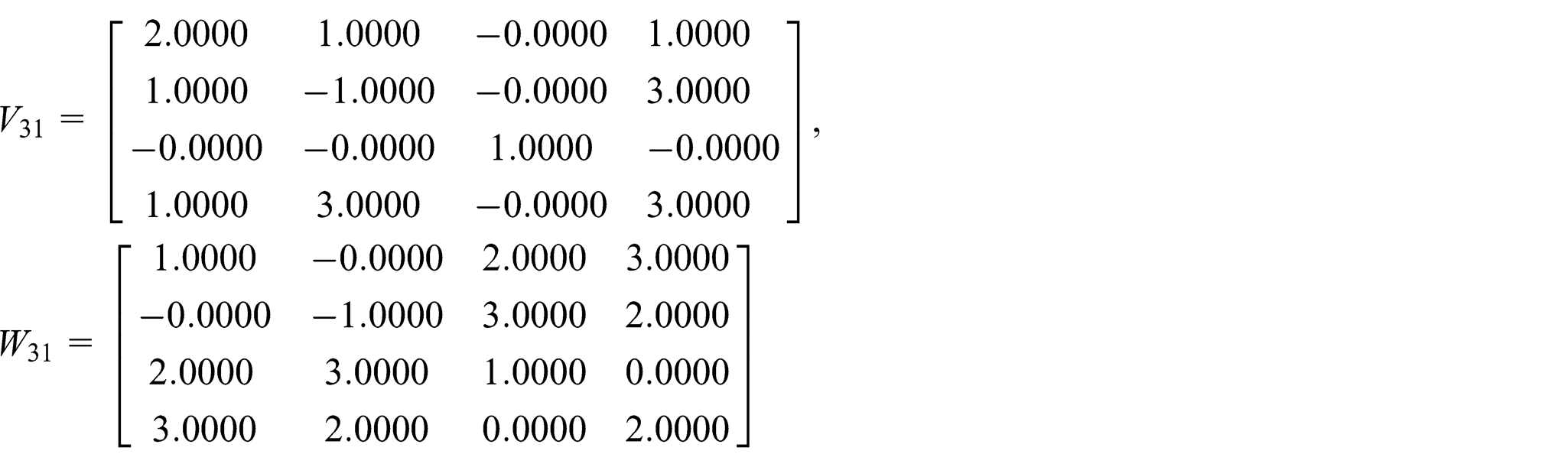
To find the matrix pair with such that Equations (1) are satisfied, we choose the initial matrices and . By applying Algorithm 3, we obtain the solutions as follows
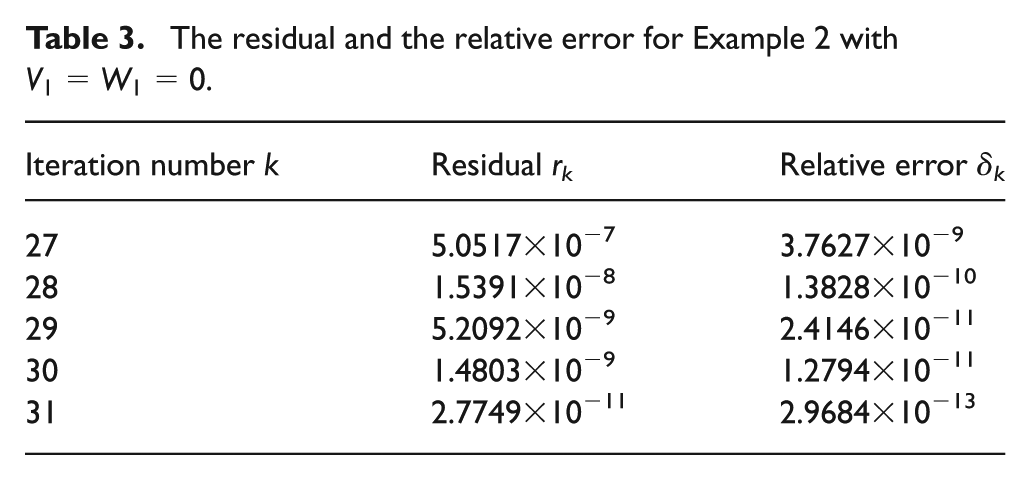
The residual and the relative error for Example 2 with .
Iteration number k
Residual rk
Relative error δk
27
5.0517×10−7
3.7627×10−9
28
1.5391×10−8
1.3828×10−10
29
5.2092×10−9
2.4146×10−11
30
1.4803×10−9
1.2794×10−11
31
2.7749×10−11
2.9684×10−13
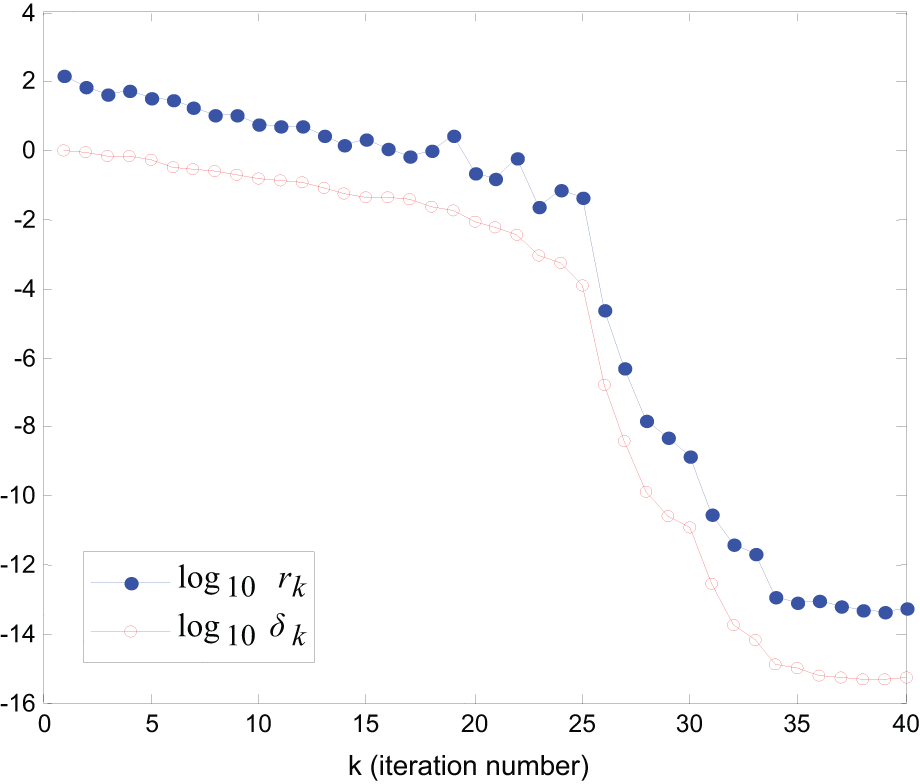
The residual and the relative error for Example 2 with .
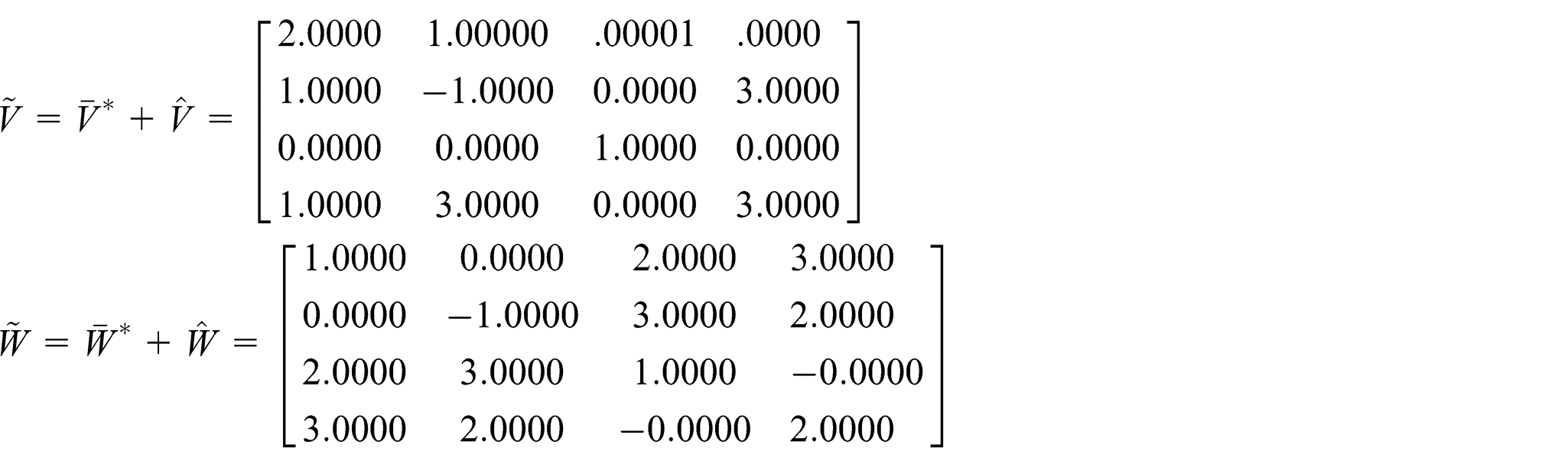
Now let
By Algorithm 3 with the initial matrix pair , we can obtain the least Frobenius norm generalized solution pair of the generalized coupled Sylvester matrix equations (35) as follows
with the corresponding residual
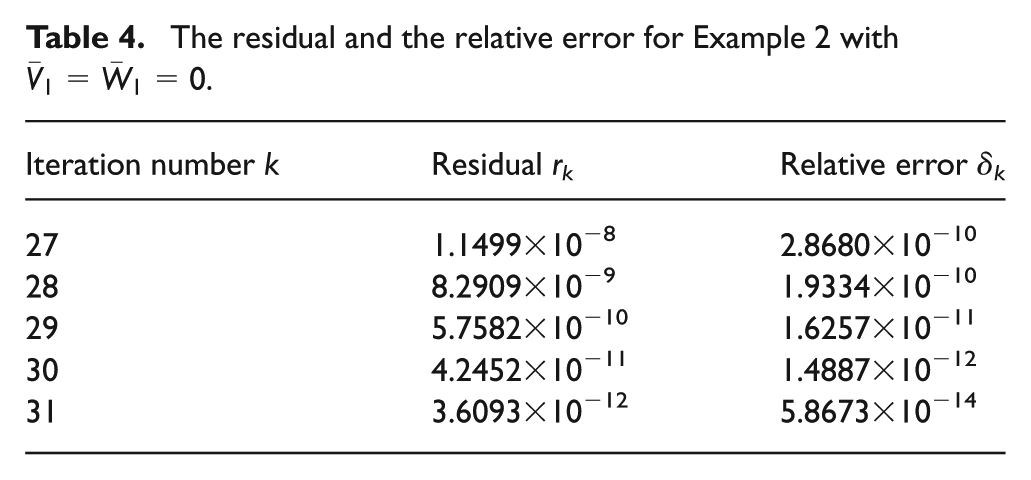
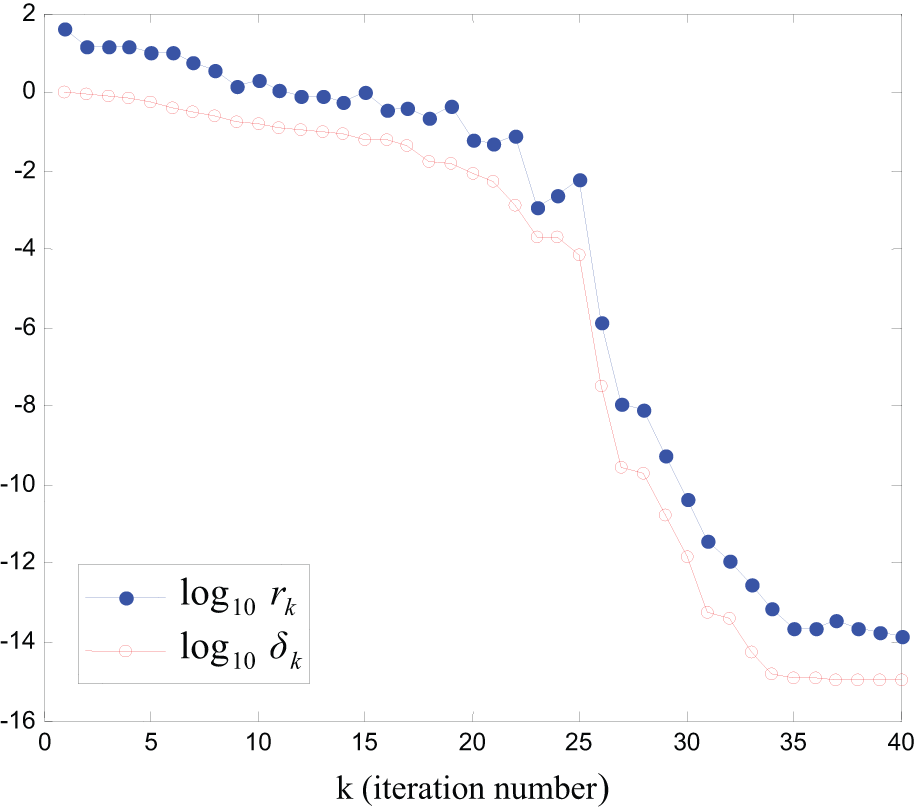
The values of the relative error and the residual are shown in Table 4 and Figure 4.
The residual and the relative error for Example 2 with .
Iteration number k
Residual rk
Relative error δk
27
1.1499×10−8
2.8680×10−10
28
8.2909×10−9
1.9334×10−10
29
5.7582×10−10
1.6257×10−11
30
4.2452×10−11
1.4887×10−12
31
3.6093×10−12
5.8673×10−14
The residual and the relative error for Example 2 with .
The symmetric solution of the nearness problem can be calculated from the following relations.
with the corresponding residual
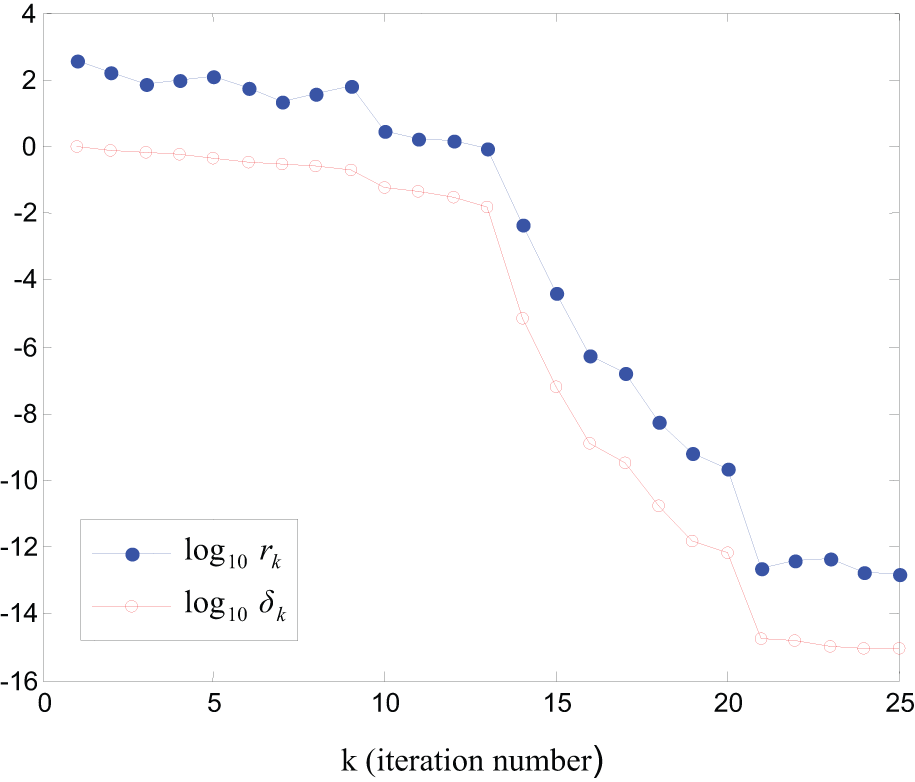
Example 3. For a bisymmetric case
Consider the generalized coupled Sylvester matrix equations (1) with the following matrices:
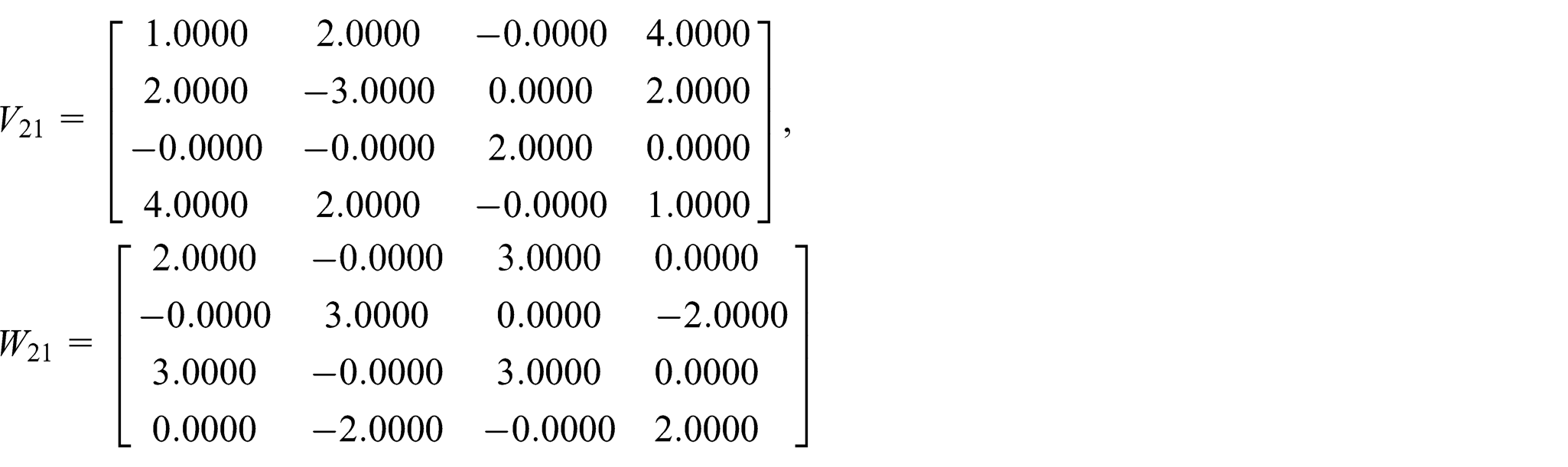
It can be verified that matrix equations (1) are consistent over bisymmetric matrices and their bisymmetric solutions are as follows:
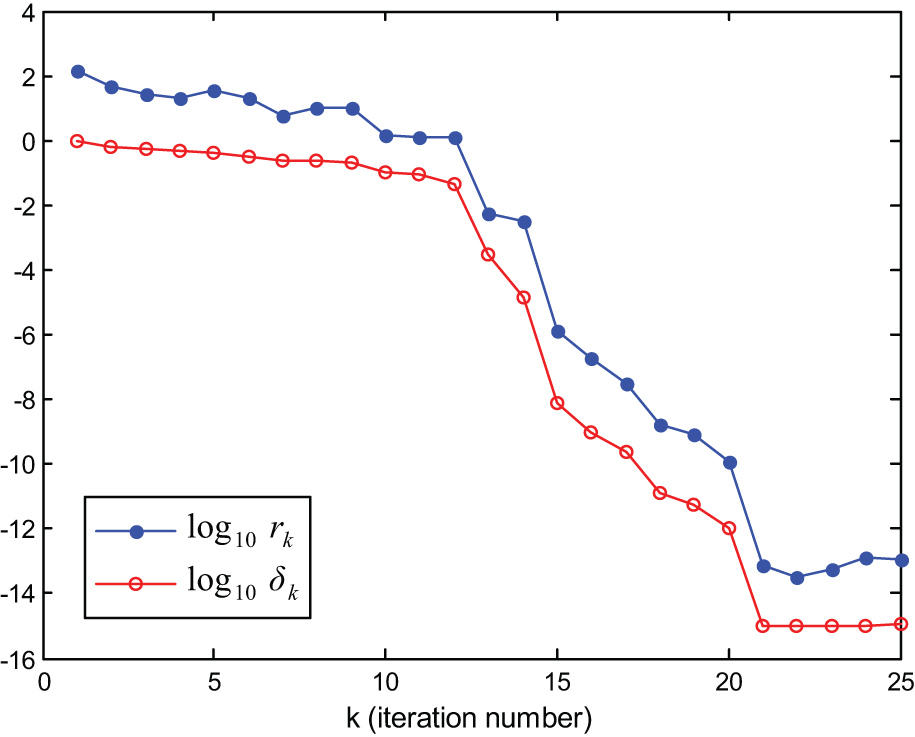
To obtain the matrix pair with and such that Equations (1) are satisfied, we suppose that the initial matrices and . By applying Algorithm 2, we obtain the solutions as follows
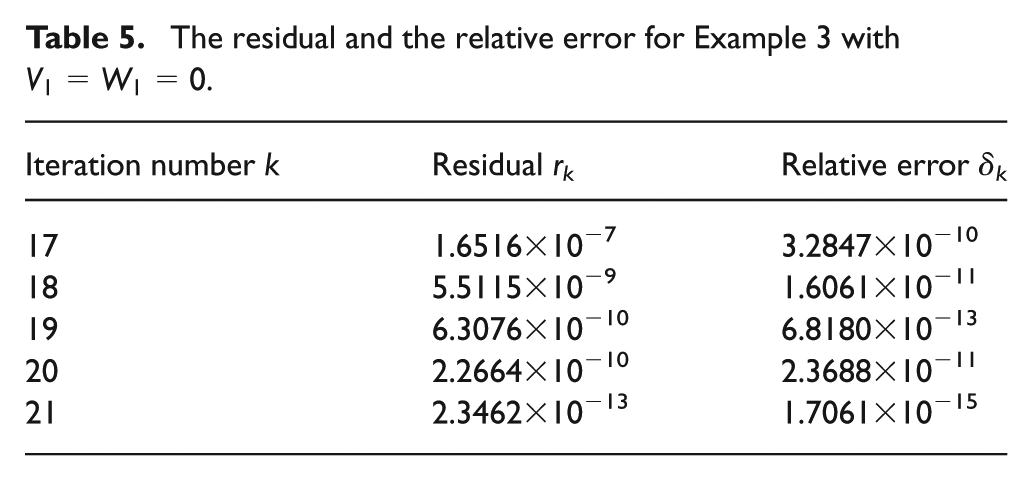
The residual and the relative error for Example 3 with .
Iteration number k
Residual rk
Relative error δk
17
1.6516×10−7
3.2847×10−10
18
5.5115×10−9
1.6061×10−11
19
6.3076×10−10
6.8180×10−13
20
2.2664×10−10
2.3688×10−11
21
2.3462×10−13
1.7061×10−15
The residual and the relative error for Example 3 with .
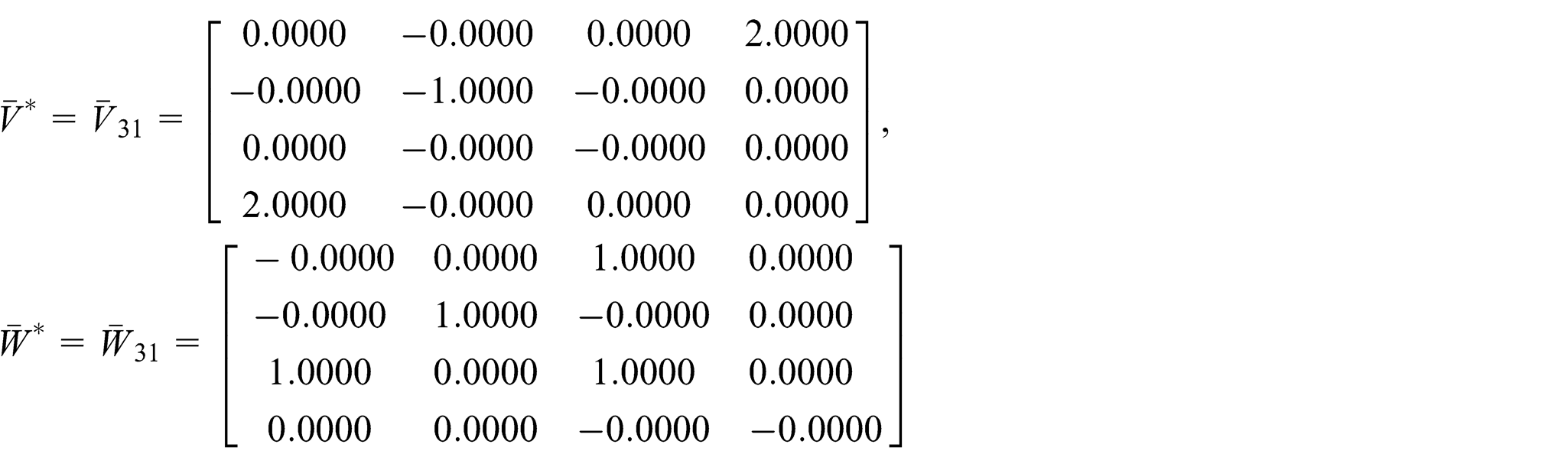
Now let
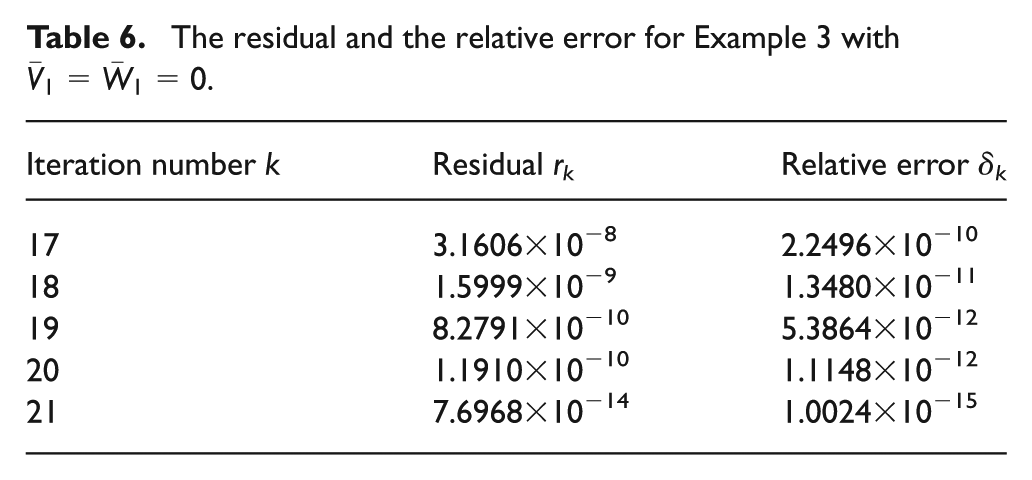
By applying Algorithm 2 for the generalized coupled Sylvester matrix equations (31), and letting the initial pair , we can obtain the least Frobenius norm generalized solution pair of the generalized coupled Sylvester matrix equations (31) as follows
The residual and the relative error for Example 3 with .
Iteration number k
Residual rk
Relative error δk
17
3.1606×10−8
2.2496×10−10
18
1.5999×10−9
1.3480×10−11
19
8.2791×10−10
5.3864×10−12
20
1.1910×10−10
1.1148×10−12
21
7.6968×10−14
1.0024×10−15
The residual and the relative error for Example 2 with .
Once the matrix pair is obtained, the solution of the nearness Problem 4 can be computed as follows
with the corresponding residual
Conclusion
This paper was concerned with the generalized bisymmetric solution to the generalized coupled Sylvester matrix equations. We presented three iterative algorithms to solve the generalized coupled Sylvester matrix equations. Firstly, we introduced a generalized solution to solve the generalized coupled Sylvester matrix equations; then a generalized bisymmetric (symmetric) solution was also constructed. With the iterative algorithms, the solvability of the generalized coupled Sylvester matrix equations can be determined automatically. Also, when the generalized coupled Sylvester matrix equations are consistent, we proved that for any initial matrix pair , generalized and generalized bisymmetric (symmetric) solutions can be obtained within a finite iteration steps. Also, the least Frobenius norm generalized solution pair in these cases can be obtained by choosing a suitable initial matrix pair. In addition, the optimal approximation solution to given generalized coupled Sylvester matrix equations can be derived by first finding the least Frobenius norm generalized solution pair of new generalized coupled Sylvester matrix equations then recover the optimal approximation solution of the nearness problem via certain relations. Numerical examples are given to support the theoretical results of this paper and to illustrate the accuracy of the proposed algorithms. The numerical results show also that the proposed method may be applied to solve more general forms of generalized coupled Sylvester matrix equations of over generalized bisymmetric matrices.
Footnotes
Appendix
Acknowledgements
The authors wish to express their sincere thanks to the anonymous referees for their helpful comments and suggestions.
References
1.
BartelsRSStewartGW (1972) Solution of the matrix equation . Communications of the ACM15(9): 820–826.
2.
CarvalhoJBDattaBN (2002) An algorithm for generalized Sylvester-observer equation in state estimation of descriptor linear systems. Proceedings of the 41st IEEE Conference Decision and Control, Las Vegas, NV, pp. 3021–3026.
3.
CastelanEBda SilvaVG (2005) On the solution of a Sylvester equation appearing in descriptor linear systems control theory. Systems & Control Letters54(2): 109–117.
4.
DattaBN (1995) Numerical Linear Algebra and Applications. Pacific Grove, CA: Brooks/Cole Publishing Co.
5.
DattaBN (2003) Krylov subspace methods for large-scale matrix problems in control. Future Generation Computer Systems19(7): 1253–1263.
6.
DehghanMHajarianM (2008a) An iterative algorithm for solving a pair of matrix equations over generalized centro-symmetric matrices. Computers & Mathematics with Applications56(12): 3246–3260.
7.
DehghanMHajarianM (2008b) An iterative algorithm for the reflexive solutions of the generalized coupled Sylvester matrix equations and its optimal approximation. Applied Mathematics and Computation202(2): 571–588.
8.
DehghanMHajarianM (2009a) Efficient iterative method for solving the second-order Sylvester matrix equation . IET Control Theory & Applications3(10): 1401–1408.
9.
DehghanMHajarianM (2009b) Finite iterative algorithms for the reflexive and anti-reflexive solutions of the matrix equation . Mathematical and Computer Modelling49(9–10): 1937–1959.
10.
DehghanMHajarianM (2009c) On the reflexive solutions of the matrix equation . Bulletin of the Korean Mathematical Society46(3): 511–519.
11.
DehghanMHajarianM (2010a) An iterative method for solving the generalized coupled Sylvester matrix equations over generalized bisymmetric matrices. Applied Mathematical Modelling34(3): 639–654.
12.
DehghanMHajarianM (2010b) On the reflexive and anti-reflexive solutions of the generalized coupled Sylvester matrix equations. International Journal of Systems Science41(6): 607–625.
13.
DehghanMHajarianM (2010c) The reflexive and anti-reflexive solutions of a linear matrix equation and systems of matrix equations. Rocky Mountain Journal of Mathematics40(3): 825–848.
14.
DingFChenT (2005a) Gradient based iterative algorithms for solving a class of matrix equations. IEEE Transactions on Automatic Control50(8): 1216–1221.
DingFChenT (2005c) Hierarchical least squares identification methods for multivariable systems. IEEE Transactions on Automatic Control50(3): 397–402.
17.
DingFChenT (2005d) Iterative least squares solutions of coupled Sylvester matrix equations. Systems & Control Letters54(2): 95–107.
18.
DingFChenT (2006) On iterative solutions of general coupled matrix equations. SIAM Journal on Control and Optimization44(6): 2269–2284.
19.
DingFLiuPXDingJ (2008) Iterative solutions of the generalized Sylvester matrix equations by using the hierarchical identification principle. Applied Mathematics and Computation197(1): 41–50.
20.
DuanGR (1992) Solution to matrix equation and eigenstructure assignment for descriptor systems. Automatica28(3): 639–643.
21.
DuanGR (1993) Solution to matrix equation and their application to eigenstructure assignment in linear systems. IEEE Transactions on Automatic Control38(2): 276–280.
22.
DuanGR (1998) Eigenstructure assignment and response analysis in descriptor linear systems with state feedback control. International Journal of Control69(5): 663–694.
23.
FletcherLRKautaskyJNicholsNK (1986) Eigenstructure assignment in descriptor systems. IEEE Transactions on Automatic Control31(12): 1138–1141.
24.
GolubGHNashSVan LoanCF (1979) A Hessemberg–Schur method for the problem . IEEE Transactions on Automatic Control24(6): 909–913.
25.
GolubGHVan LoanCF (1996) Matrix Computations, 3rd ed.Baltimore, MD: The Johns Hopkins University Press.
26.
HouJJPengZYZhangXL (2006) An iterative method for the least squares solution of matrix equation . Numerical Algorithms42(2): 181–192.
27.
HuangGXYinFGuoK (2008) An iterative method for the skew–symmetric solution and the optimal approximate solution of the matrix equation . Journal of Computational and Applied Mathematics212(2): 231–244.
28.
KaabiA (2007) On the numerical solution of large scale Sylvester matrix equations. Applied Mathematical Sciences1(58): 2895–2905.
29.
LiYTWuWJ (2008) Symmetric and skew–antisymmetric solutions to systems of real quaternion matrix equations. Computers & Mathematics with Applications55(6): 1142–1147.
30.
MonsalveM (2008) Block linear method for large scale Sylvester equations. Computational & Applied Mathematics27(1): 47–59.
31.
PengYXHuXYZhangL (2005) An iteration method for the symmetric solutions and the optimal approximation solution of the matrix equation . Applied Mathematics and Computation160(3): 763–777.
32.
PengYXHuXYZhangL (2006) An iterative method for symmetric solutions and optimal approximation solution of the system of matrix equations . Applied Mathematics and Computation183(2): 1127–1137.
33.
WangMChengXWeiM (2007) Iterative algorithms for solving the matrix equation . Applied Mathematics and Computation187(2): 622–629.
34.
WuAGDuanGRFuYM (2007) Generalized PID observer design for descriptor linear systems. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics37(5): 1390–1395.
35.
WuAGDuanGRZhouB (2008a) Solution to generalized Sylvester matrix equation. IEEE Transactions on Automatic Control53(3): 811–815.
36.
WuAGZhuFDuanGR. (2008b) Solving the generalized Sylvester matrix equation via a Kroncker map. Applied Mathematical Letters21(10): 1069–1073.
37.
Xing pingSGuoliangC (2007) A finite iterative method for solving a pair of linear matrix equations . Applied Mathematics and Computation189(2): 1350–1358.
38.
ZhouBDuanGR (2006) A new solution to the generalized Sylvester matrix equation . Systems & Control Letters55(3): 193–198.
39.
ZhouBDuanGR (2007) Solutions to generalized Sylvester matrix equation by Schur decomposition. International Journal of Systems Science38(5): 369–375.
40.
ZhouBDuanGRLiZY (2009) Gradient based iterative algorithm for solving coupled matrix equations. Systems & Control Letters58(5): 327–333.