
Abstract
In this paper, a new model reference adaptive controller (MRAC) for uncertain switched linear systems is developed. A class of uncertain switched linear systems with parametric mismatched and input matched uncertainties, control input effectiveness and unmodeled dynamics is studied in this paper. The difference in input matrix for different switching modes which means the input channel degradation is investigated through this paper. By using common Lyapunov function method and developing new linear matrix inequality based sufficient conditions, uniform ultimate boundedness of the reference tracking error is guaranteed by switched MRAC and by using a novel nonlinear controller term, the size of the uniform ultimate bounded region can be made arbitrarily small which could enhance the performance of the overall control structure. Modified versions of MRAC systems using low-frequency learning adaptation MRAC is also used for better transient performance at switching instants. An illustrative numerical example demonstrates the performance of the proposed approach. Results also show that for the cases without parametric uncertainty in the linear part, asymptotic stability of the reference tracking error is guaranteed.
Keywords
Introduction
Hybrid systems as an attractive area for control engineers tend to continuous-time systems with switching which we refer as switched systems. Specifically, a switched system is a hybrid system that consists of a family of subsystems and a switching law that orchestrates switching between these subsystems. It is well known that many physical models such as power systems, aircraft control systems, chemical control processes, manufacturing systems and communication network systems can be transformed into this kind of systems (Liberzon, 2003; Liberzon and Morse, 1999).
Therefore, due not only to their success in applications but also to their importance in theory, the last decade has witnessed burgeoning research activities on their stability (Liberzon and Morse, 1999; Michel, 1999), controllability, observability (Sun et al., 2002), etc., that aim at designing switched systems with guaranteed stability and performance. Among these topics, designing controllers to obtain stability of switched systems with various kinds of model uncertainty have attracted the most attention (He et al., 2012; Lian and Zhao, 2009a,b; Liu et al., 2013; Sun and Ge, 2005). These efforts have been resulted in the development of various stability criteria and analysis tools for switched systems, such as common Lyapunov function (CLF), multiple Lyapunov functions, and the average dwell-time method.
Adaptive control of linear uncertain dynamical systems has been widely studied for systems with significant uncertainties and unmodeled dynamics. The widely studied model reference adaptive control (MRAC) framework has in particular many theoretical results, proving asymptotic tracking error convergence or ultimate boundedness of tracking error in the presence of significant modeling uncertainty, and several experimental results (Tao, 2003).
In addition to removing the restrictive conditions of normal adaptive control, switching is also used to enhance the control performance. More precisely, the switching logic becomes a selecting algorithm that chooses the best controller among the candidate controllers and connects it to the plant. For example, the multiple models adaptive control method improves the transient response of adaptive systems in a stable fashion (Hespanha et al., 2003), and the switching between a robust controller and an adaptive controller by Quang (2006) enhances both the transient and the steady performance dramatically. For switched systems with external switching signal, the importance of synchronously switching the controller with the plant switching mode is necessary in which all switching modes, the controller must have good performance (El Rifai et al., 2005). El Rifai et al. (2005) proposed a controller design algorithm for switching systems with an external periodic switching law.
Among several controller design problems for switched linear systems with uncertainty, the sliding mode method and robust H∞ controller are the most popular. Switching model reference adaptive controller is another solution for this problem that has been used recently and various kinds of switched MRAC have been proposed in papers published in the last decade. Wang et al. (2012a) and references therein provide a good survey. MRAC for switched systems has been shown to have good performance on various kinds of uncertainty resources and unmodeled dynamics, and is easy to implement in comparison with other switching uncertainty dealing controllers. Standard MRAC systems in the face of uncertainty and dynamic modeling seem to be nonfragile but practically they are limited to some predetermined structure for uncertainty. Recent papers tend to use robust MRAC (Wang et al., 2012a) which is a developed version of robust adaptive control for switched systems or neural-network (NN)-based MRAC (Singh and Sukavanam, 2012) and concurrent learning adaptive structured (De La Torre et al., 2013) to deal with the above-mentioned problems. Practically, much attention has also been focused on new versions of MRAC systems which are similar to the standard structure but with some modification terms and are more easy to understand and implement than robust MRAC or NN-based MRAC. The idea behind these adaptive structures is to attenuate the effect of uncertainty in the learning phase of adaptation law (Schatz et al., 2013a,b; Yucelen and Haddad, 2013; Yucelen et al., 2009). Surprisingly, the learning phase of switched adaptive controller in each active mode is when the spotlight problems occur in switched systems. For switched systems with external fast switching laws, a fast response adaptive reference tracking control system is necessary.
In this paper, we have developed a novel structure model reference adaptive controller for uncertain switched systems. Various kinds of uncertainty and unmodeled dynamics for switched system are considered. The effect of the input channel which could be a cause of actuator deterioration is also considered. The structure of MRAC in this paper is based on the modified versions of standard adaptive controller for uncertain switched systems. It will be proven by CLFs that the proposed structure for switched systems will guarantee the stability of closed-loop systems and by using modified versions of adaptive laws such as low-frequency learning, the quality of responses at switching events will be improved.
The uniformly ultimate boundedness of error signals is proven in this paper in a similar manner to the existing works but due to the novel nonlinear controller block considered in this paper, a degree of freedom to trade off between control signal domain and radius of the uniform ultimate bounded (UUB) region is available in the proposed method which could be useful in practical implementations. The quality of the error signals in learning phase (transient) is also enhanced by using a modified version of the MRAC structure. Using such easy adaptation laws with inclusive performance in comparison with the existing robust MRAC or NN-based controllers is the key advantage of the method proposed in this paper.
This paper is organized as follows. The next section provides some preliminary definitions and gives a brief description of the problem formulation. Followed by introducing a new structure for MRAC of uncertain switched systems, developing the closed-loop error dynamics and presenting sufficient conditions for stability and convergence. An illustrative numerical example is given to demonstrate the efficacy of the proposed structure and finally the conclusions are given.
Notations
The superscript AT stands for matrix transposition, A−1 for inverse and A# for pseudo-inverse of a matrix. The subscript Am is for any matrix is related to reference model and subscript Ai stands as representative for system’s index. Here
Problem formulation and preliminaries
Consider a class of uncertain switched systems with the following state-space representation:

where
The following assumptions are given for the switched system (1).


where Di and Ei are known constant matrices andΣ i (t) is an unknown time-varying matrix function satisfying


where

where ε
i
(x) is unknown residual error and Wi is constant unknown weighting matrices (Schatz et al., 2013a; Singh and Sukavanam, 2012). As each subsystem has an independent dynamic model we define
For each nominal subsystem of (1),

we consider a reference model as follows:

where
Our aim of having a model reference system is to construct a feedback law u(t) such that the states of the uncertain system (1), in the presence of uncertainty, asymptotically track the states of the reference model (7) for each active subsystem and error signals stay bounded for all time especially at switching instants.
In order to achieve these purposes, we consider the control signal as follows:

where
The nominal control law for each subsystem is considered as

where

Now suppose that the nominal controller is implemented on the model equation (1) according to (8), (9) along with an approximate parameterization in Assumption 3 for matched uncertainty. We will have
where

where

where Γ i > 0 is learning rate and PM is positive-definite matrix satisfying the linear matrix inequality (LMI) condition which will be stated in next section.
Using the standard adaptation law (12) requires a high learning rate for better performance such as low transient error distance (learning phase for adaptive controllers). However, update laws with high learning rates in the face of large system uncertainties and abrupt changes which is frequent in switched systems dynamics, may yield to signals with high-frequency oscillations, which can violate actuator rate saturation constraints and/or excite unmodeled system dynamics resulting in system instability for practical applications (Rohrs et al., 1985).
where σ > 0 is the modification gain.
To address the high-frequency oscillation prevalent due to adaptation and switching instant sudden changes,

where
The novel nonlinear term in comparison with Wang et al. (2012a) and Hou et al. (2008) is chosen as a signal smoothing term, since the matched uncertainty could be attenuated by the switching adaptive controller; this term is just for adjusting the size of the UUB region due to parametric uncertainty for reference tracking error. This novel term is considered as

where
Now by defining the error terms e(t) = x(t) − xm(t),
along with (12) (due to Assumption 3 and related remarks, the parametrization vector Wai will be considered constant). The proposed control MRAC architecture consists of three different control blocks satisfying the control objectives as shown in Figure 1. As it is mentioned before, the controller and reference model are switched synchronously with the uncertain plant (1).
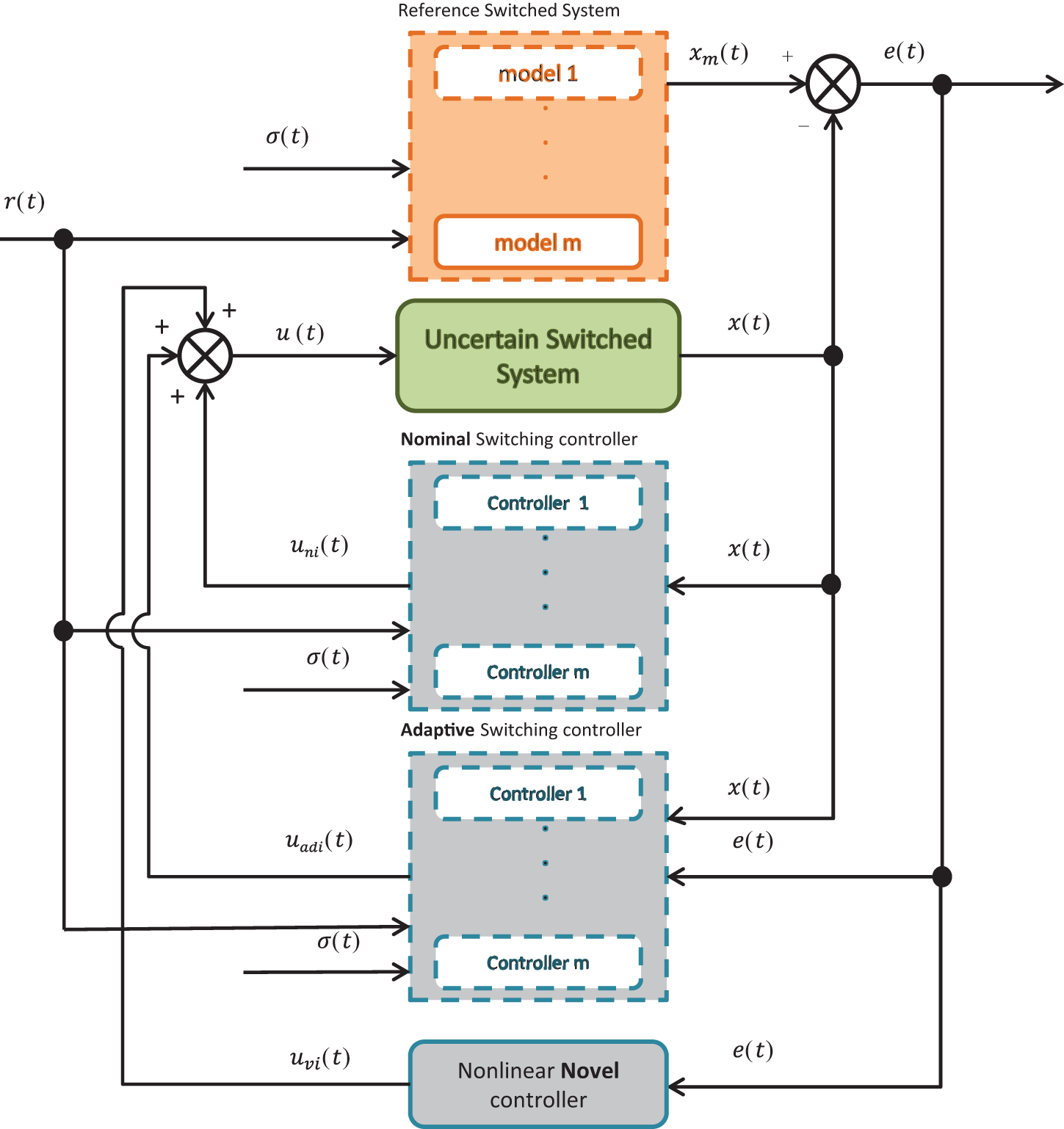
Structure of the model reference adaptive controller of an uncertain switched system.
Stability analysis and main results
In this section, the following lemmas and theorems are given to develop a sufficient condition which guarantees the uniform ultimate boundedness of the error signals.

where γ > 0 is any constant scalar.

then under an arbitrary switching law, the system and estimation error dynamics e(t) and
We now give a comprehensive proof on the proposed theorems based on the CLF which will result to uniform ultimate boundedness of states. The radius of the UUB region could be adjusted (minimized) by controller gain which will be a good improvement on the design of switched MRAC for uncertain switched system with unmodeled dynamics.

where e(t) = x(t) − xm(t),
Taking the time derivative of V(t) along the trajectories defined on state error dynamic (16) and estimation error dynamics (12) or (13), we obtain
by substituting e = x − xm we will have
by using Lemma 1 we will have
now by using LMI condition from Theorem 1 we have
The reference model and related subsystems are assumed to be Hurwitz, so xm(t) will be a bounded signal such that for all t > t0, ‖xm(t)‖ ≤ Xm; this implies that
Let us define
Then we have

Accordingly the Θ1 is a linear function of controller gain

Therefore, as
The radius of the UUB region (Θ
e
) is in direct relation with Θ2, Θ3 and reverse relation with Θ1. Actually our goal is to reduce Θ
e
to as small as possible to have
Illustrative example
In this section, we provided a numerical example to demonstrate the efficacy of the proposed structure.
Consider the following linear uncertain switched system

where σ(t) ∈ M = {1, 2} and for nominal plant we have

The parametric uncertainty is considered as D = [0, 0; 0.5, 1.5], E = diag(0.5, 0.2) and Σ1(t) = −1 ∈ [−1, 1], Σ2(t) = 0.5 sin(t) ∈ [−1,1]. The unknown control effectiveness matrices are considered constant as Λ1 = 0.5, Λ2 = 0.25 and the matched uncertainty is considered parametrized by W1 = [1.514, 0.5504, 0.0215]T, W2 = [0.1514, 0.5504, −0.0624, −0.0095,0.0215]T and
The design parameters are as follows. The nominal perfect model following controller gains are
the adaptation rates are Γ = 100, Γ f = 0.5, σ = 0.1 and novel controller gain Kn = 20. The solution of the LMI satisfying Theorem 1 for the considered example with δ = 2.5, ε = 25 will be

The radius of the UUB region Θ e is calculated based on equation (23) for Kn→ 0, Kn→∞. According to equation (23) and (21), the size of the UUB region is in direct relation with Kn and will be 0.10 ≤Θ e ≤ 0.2240 for any Kn ≥ 0 and for given parameters. Hence, the uniformly ultimately boundedness of error signals is proven for illustrated example.
For simulation we took the switching law σ(t) as a external periodic time function with frequency f = 0.25 Hz and equal duty of 2 seconds for each active switched subsystem. The simulation is done for t = 30 seconds. The following figures are the results for the above-considered example for square pulse setpoint with domain r(t) = {−1,+1}. The responses of state variables x1(t), x2(t) for uncertain switched plant are shown in Figure 2 with reference model states xm1(t), xm2(t) and setpoint input. The control signal u(t) is shown in Figure 3. Figure 4 depicts the error signals for closed-loop and uncertainty simulation, respectively.
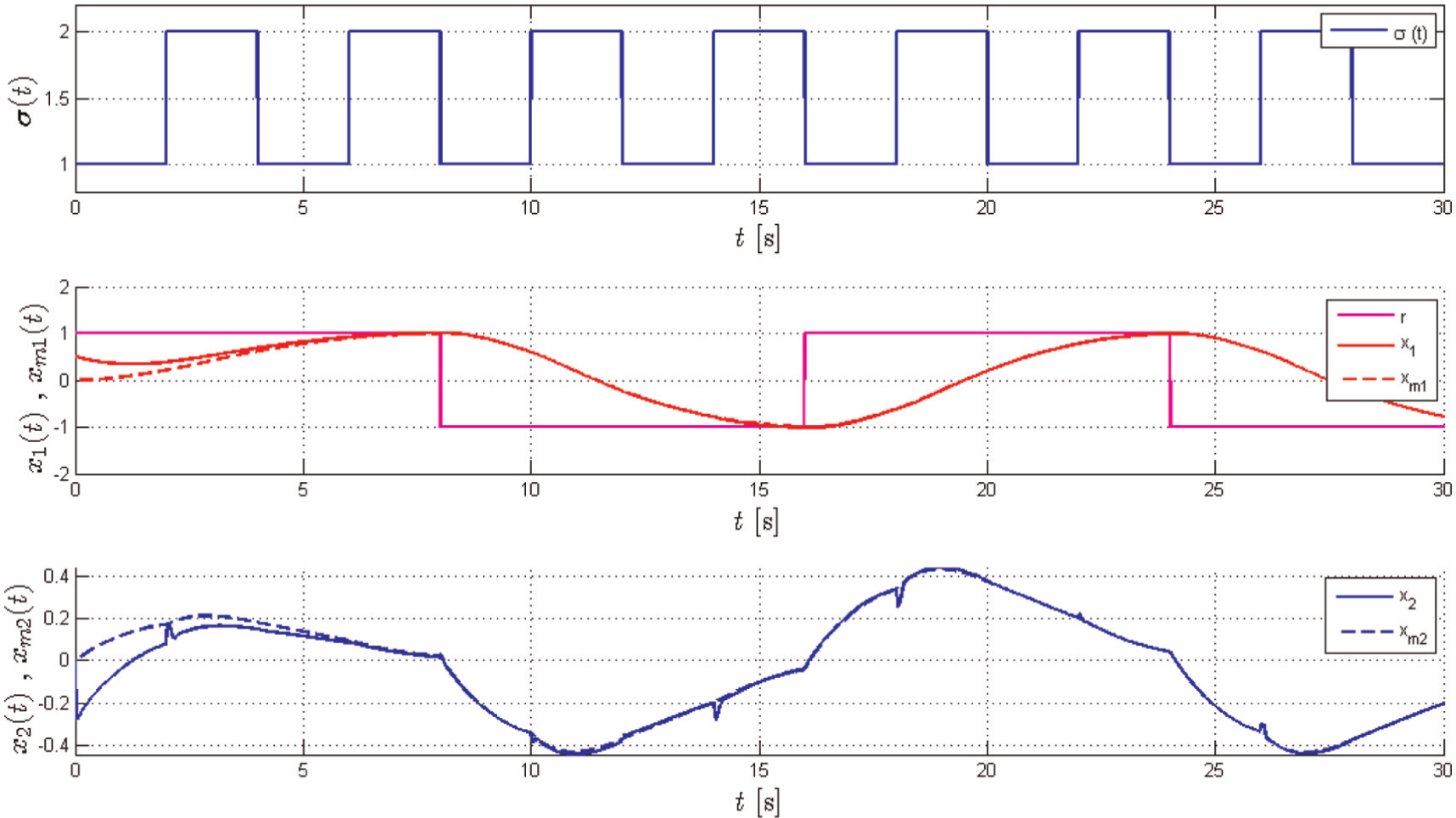
Switching signal and states of the uncertain switched plant and reference model.
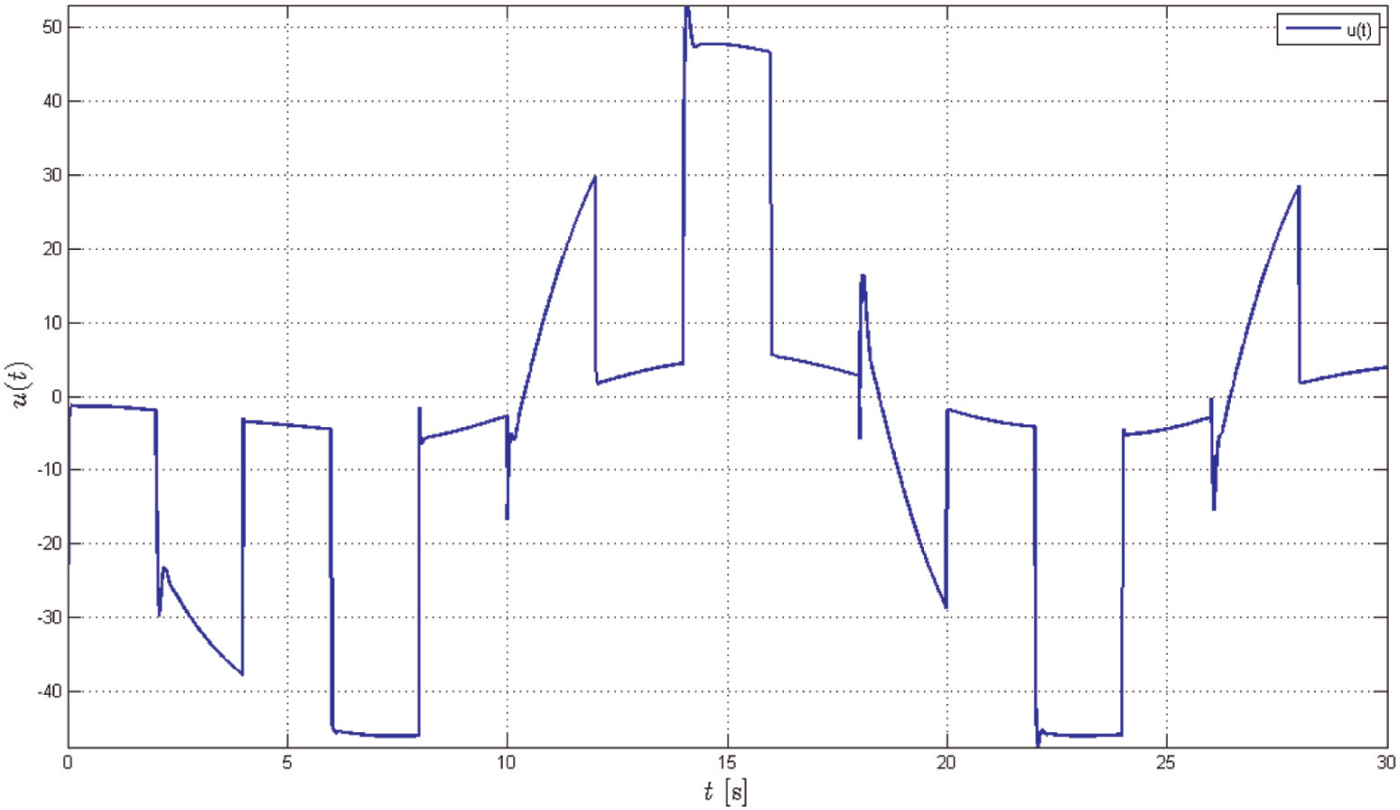
Control input.
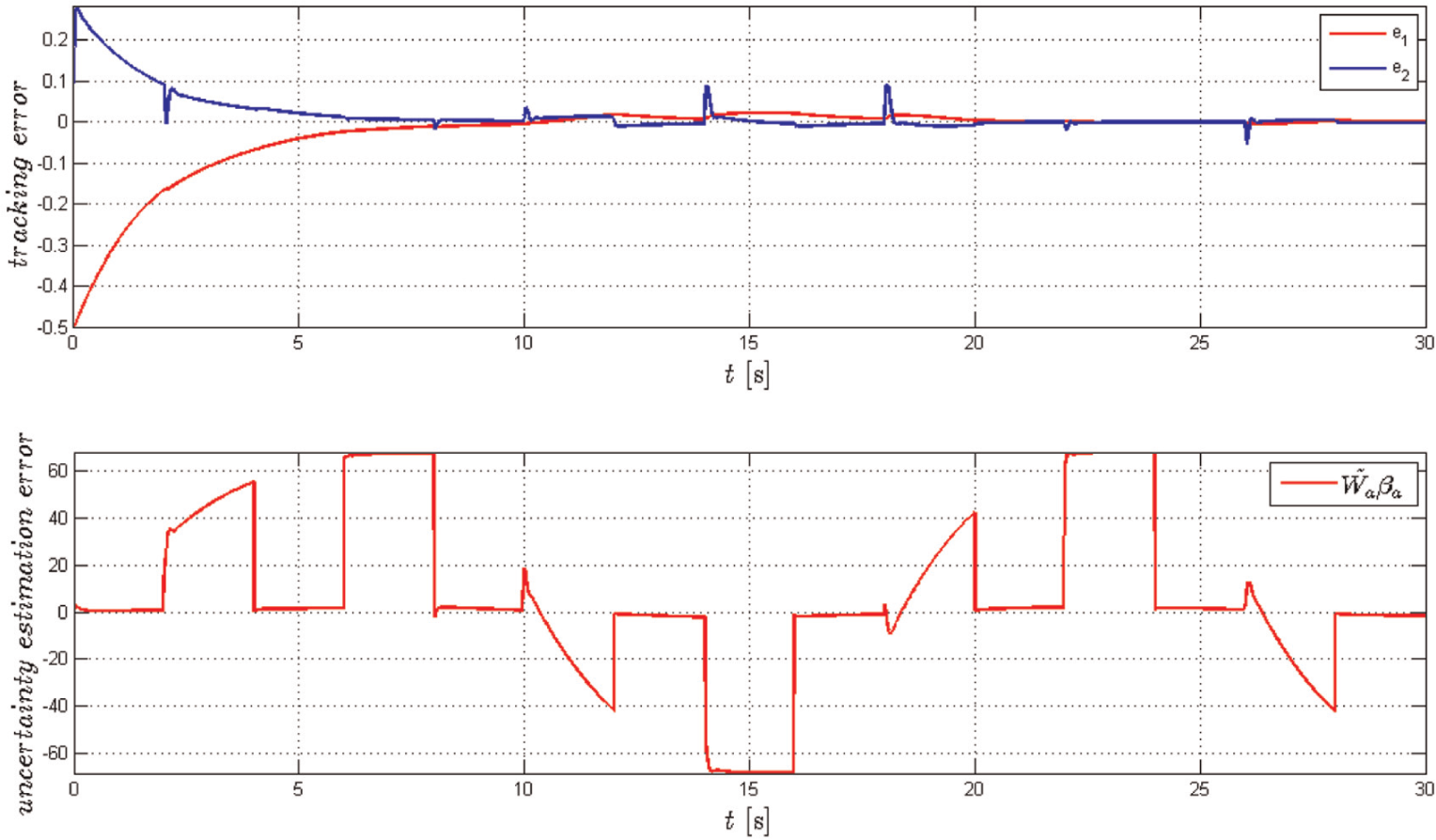
Closed-loop state error and estimation error for aggregated uncertainty.
To investigate the effect of the proposed structure more precisely, the novel controller gain is considered to have increasing values Kn = 0, Kn = 5, Kn = 20. Figure 5 shows the result for comparison of the UUB region size. As is seen, the size of the UUB region is smaller for larger Kn and also the performance at switching instants will be better for high controller gains. To show the efficacy of the proposed structure and observe its performance, a comparison with the standard MRAC structure is given is Figure 6. In this figure a composition structure of standard MRAC and nonlinear controller is also considered. As is seen, the proposed method is better in both transient response and reference tracking. Also using modified version of MRAC reduces the oscillations in the learning phase in comparison with the given composition structure.
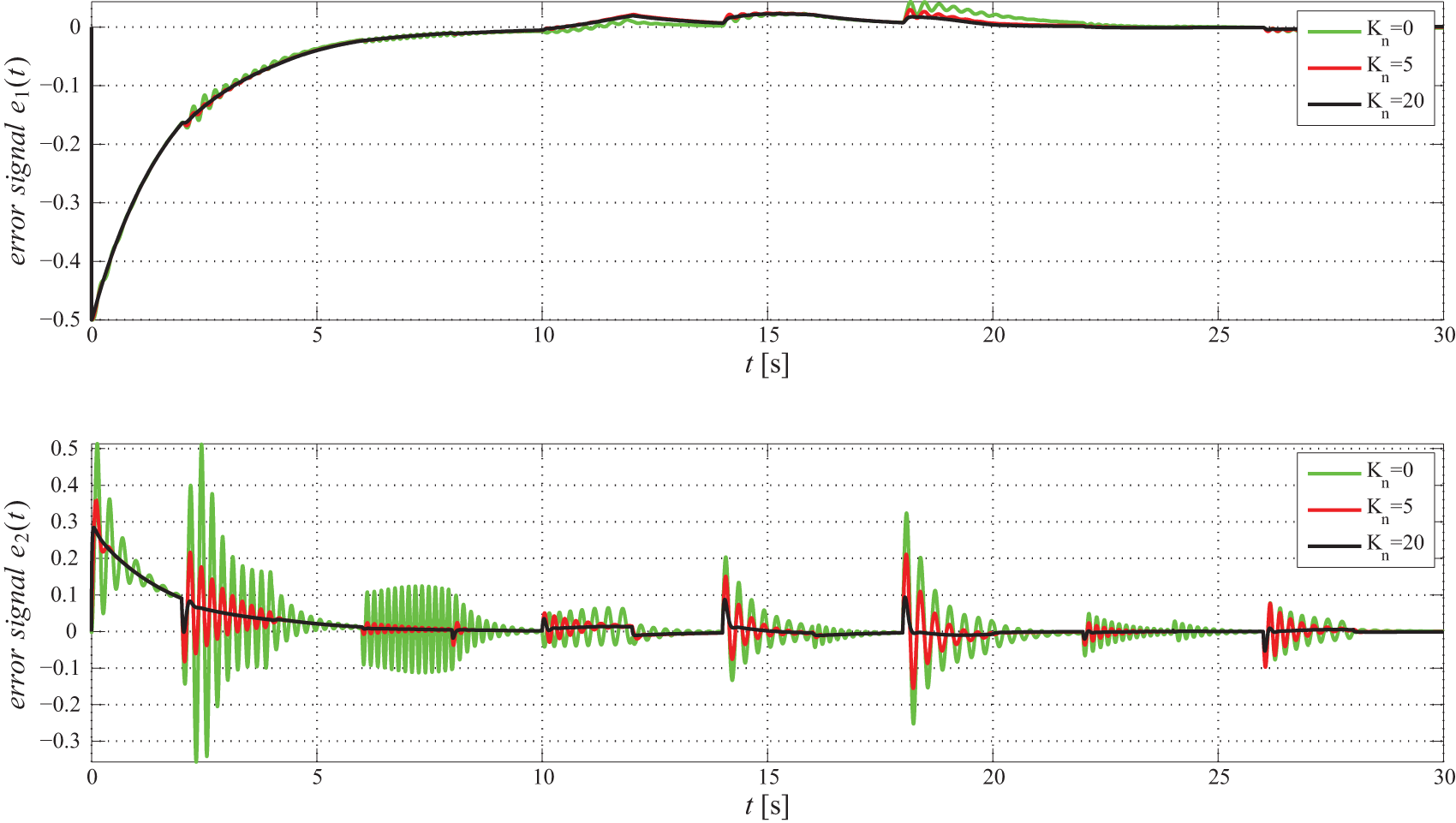
The effect of the novel controller gain on the closed-loop error and UUB region.
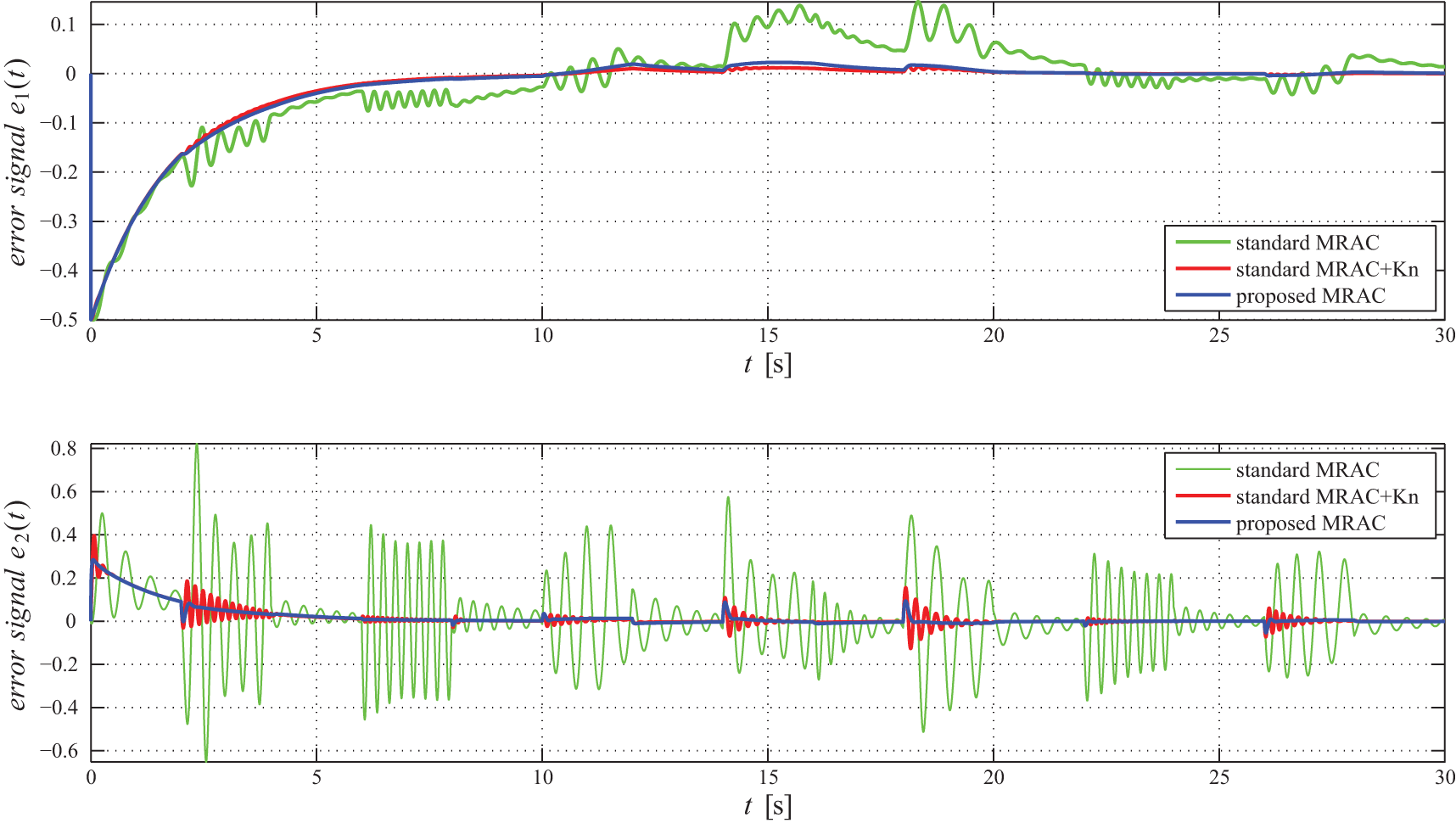
Comparison of the proposed method with standard MRAC and standard MRAC with a nonlinear term.
Conclusion
In this paper, we have considered the problem of designing a model reference adaptive controller for uncertain switched systems. The key feature of this paper is that we considered various sources of uncertainty and unmodeled dynamics which have not been mentioned before in the switched systems literature. The MRAC structure is designed for an uncertain switched system and the uniform ultimate boundedness of the error signals have been shown. Accordingly the structure for the controller is a pure adaptive control law with perfect model following and novel controller term which is easy to implement to many kinds of uncertain system in comparison with other controller structures dealing with uncertainty such as robust MRAC, etc.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.