
Abstract
The Multiple-model Adaptive Estimation method has low capability to track abrupt faults; therefore, multiple fading factors may result in diverging the Strong Tracking Filter. Moreover, the fault probability calculation is large. In this paper, an improved Strong Tracking Multiple-model Adaptive Estimation fast diagnosis algorithm is proposed. The tracking performance of the filter was improved by multiple fading factors. An improved renewal equation of the step prediction covariance matrix is proposed. The stability of the filter was guaranteed, and the estimation accuracy was improved. Based on the Euclidean norm, a fast fault isolation method that reduces the fault probability calculation is proposed. The simulation results show that this algorithm is more efficient and has a better performance.
Keywords
Introduction
During a flight, aircraft actuators inevitably face failures or suffer from battle damages such as structural damage, deadlocking and floating. If the faults are identified and isolated in time, accurate control strategies can be used, and the aircraft can complete the task or make a safe return. The survivability can be significantly improved (Denis et al., 2013; Hendrik and Thomas, 2014). Therefore, Fault Detection and Isolation (FDI) studies have certain theoretical significance and practical value (Halim and Christopher, 2014).
If an accurate mathematical model of a system is known, the state estimation method is the most direct and efficient method (Eide and Maybeck, 1996). By designing a filter or observer, the method can fully utilize the analytical model of the system and the measurable information. By reconstructing or estimating the system variable, an output residual between the filter and the real system can be obtained. Then, the fault diagnosis system can be achieved based on residual analysis.
For aircraft actuator faults, the Multiple-model Adaptive Estimation (MMAE) is an efficient and fast fault diagnosis method (Maybeck, 1999). This method is based on a set of Kalman Filters (KFs) running in parallel, each of which matches a particular fault status of the system. A hypothesis testing algorithm uses the residuals from each KF to assign a conditional probability to each fault hypothesis. The main advantage is its sensitivity to parameter variations, leading to faster fault isolation than that achieved by other methods without a multiple-model structure. However, the number of addressable faults is limited because of the computational load required for each filter. The method also does not provide satisfactory results when an occurring fault does not closely match a predefined fault hypothesis, and the computational load is very intense. Therefore, the online use of this method was impractical for a long time. To drastically reduce the number of filters needed and make it useful for the nonlinear estimation of some (unknown) fault parameters, Ducard and Geering (2006, 2008) proposed the Extended Multiple-model Adaptive Estimation (EMMAE). Only one Extended Kalman Filter (EKF) is responsible for completely monitoring one actuator’s health. To improve the ability of the EMMAE method to track abrupt faults, combined with the Strong Tracking Filter (STF; Zhou and Ye, 2000), Liu and Li (2012) proposed the Strong Tracking Multiple-model Adaptive Estimation (STMMAE). However in this method, the introduction of multiple fading factors may result in diverging the STF (Yu, 2014). By using Cholesky triangular decomposition and Unit triangle matrix and Diagonal matrix (UD) factorization (Li, 2009; Zhou and Xiao, 2012), respectively, the STF algorithm was modified and the filter stability was guaranteed, but the filter calculation increased.
Another type of improved STF algorithm uses a sampling point to approximate the representation of the state mean and covariance. The calculation of a system Jacobian matrix was avoided, and the estimation precision increased, such as in the Strong Tracking Unscented Kalman Filter (STUKF) (Jwo et al., 2013; Pu et al., 2014), Strong Tracking Cubature Kalman Filter (STCKF) (Du and Li, 2014; Li and Sun, 2013). However, by comparing the EKF, Unscented Kalman Filter (UKF), Cubature Kalman Filter (CKF) and their improved algorithms with a strong tracking method in Liu and Zhang (2014), the EKF has the highest operation efficiency, and the computation of the improved algorithms based on the STF method increased, such that the running time of the STUKF is about eight times of that of the EKF.
In the MMAE and its improved methods, a majority of fault probability calculations use a hypothesis testing method based on the Gauss probability density function (Qiu et al., 2012). The assumption that these residuals are Gaussian distributed is completely reasonable, particularly when the aircraft dynamics are slow (Ducard and Geering, 2006). However, the conditional probability calculation by multidimensional Gaussian probability density function is multiple integrals, involving a large amount of computation. With the increase in the dimension of the state vector, the computation will increase significantly. The requirement of real-time control in FDI is difficult to satisfy.
In this paper, for a typical aircraft actuator fault, an Improved Strong Tracking Multiple-model Adaptive Estimation (ISTMMAE) algorithm based on multiple fading factors is proposed. Firstly, by introducing multiple fading factors into an improved updated equation of the state-error covariance matrix, the filter stability was guaranteed, and the theoretical proof was provided. Compared to the methods reported by Li (2009) and Zhou and Xiao (2012), the improved STF reduces the calculation and improves the precision of estimation. Further, in this study, the fault probability calculation was simplified from multidimensional to one dimension by the Euclidean norm. A fast fault probability calculation algorithm is proposed. The computational complexity was significantly reduced.
Aircraft nonlinear dynamics
A set of continuous nonlinear differential equations is used to describe the aircraft nonlinear dynamics as follows (Ducard and Geering, 2008):

where
Fault Detection and Isolation scheme based on the Improved Strong Tracking Multiple-model Adaptive Estimation method
Figure 1 shows the ISTMMAE aircraft actuator faults fast diagnosis algorithm proposed in this paper.
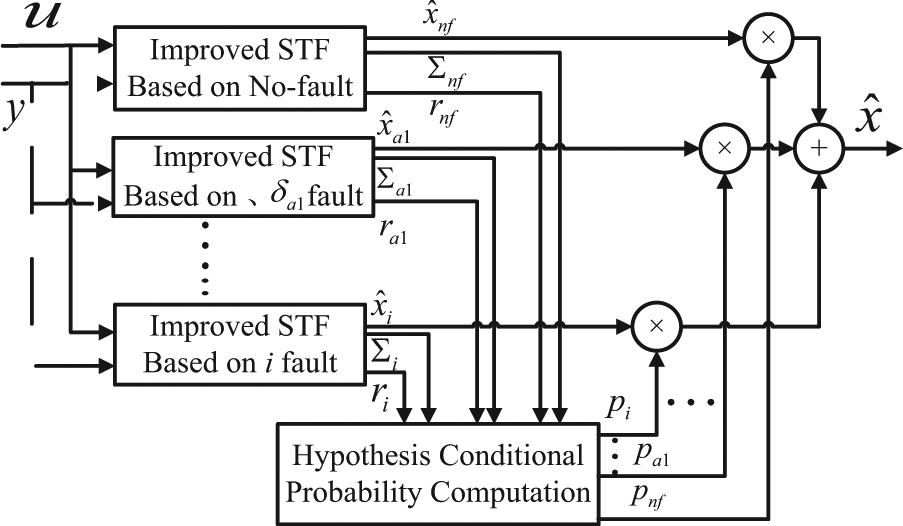
Improved Strong Tracking Multiple-model Adaptive Estimation (ISTMMAE) fast diagnosis algorithm for aircraft actuator faults.
Designing the ISTMMAE for the no-fault scenario
Using the Euler integration method, around the current operating point, Equation (1) was first linearized and discredited as follows (Ducard and Geering, 2008):

where
The computation steps of the improved STF for the no-fault scenario are as follows:
















Actuator faults modelling and ISTMMAE designing for the fault scenario
When a lock-in-place or floating actuator fault in the system appears, the desired control input
As shown in Figure 2, true inputs are as follows:

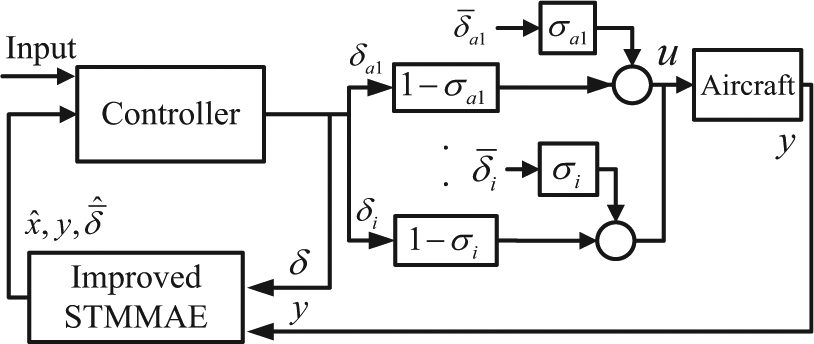
Modelling of actuator faults.
When the ith actuator fails,
The ith STF is used to estimate the deflection of the failed actuator. In order to monitor the occurrence of the ith actuator fault, we increase the state vector of the ith filter as follows:

For each filter ith, the increased state vector affords state-space equations as follows:

The linearization of the dynamics matrix is

The input matrix becomes

where

where
Above all, the linearized system evaluated at each sampling time is as follows:
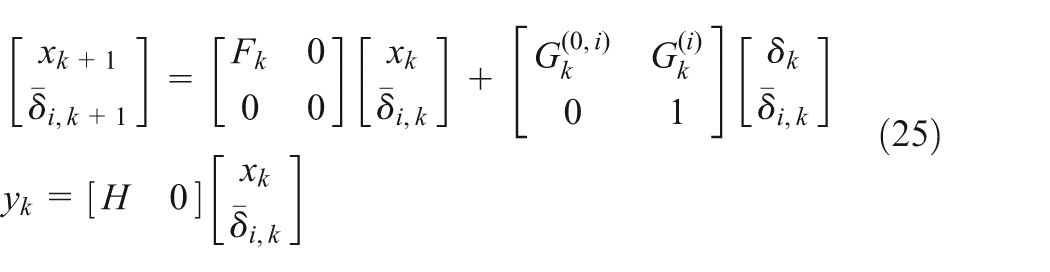
Based on the linearized faults model shown in Equation (25) and the same computation steps of the improved STF in Equations (3)–(18), the ISTMMAE filters of the five actuator faults were designed.
Divergence phenomenon and solution of STMMAE
The STF can adjust the corresponding gain matrix online and force the residuals orthogonal to each other by introducing a time-varying suboptimal fading factor

where
The new multiple fading factor STF algorithm proposed in this paper improved the forward propagation of the state-error covariance matrix Equation (26) into Equation (17). Double multiple fading factors were introduced into
For the improved algorithm, the following conditions are also satisfied to guarantee the strong tracking capability (Zhou and Ye, 2000):


According to Theorem 1 in Zhou and Xiao (2012), the conditions satisfied in Equations (27) and (28) are equivalent to satisfy Equation (29):

Then, substituting Equation (3) into Equation (29):

The sufficient condition of Equation (29) satisfied is

Substituting Equation (17) into Equation (31),

Based on the matrix trace properties:

The weakening factor
Fast Fault Isolation method based on the Euclidean norm
The Gauss probability density function hypothesis testing method is widely used to calculate the fault probability in MMAE and its various improved methods. Ducard and Geering (2008) analysed the reason and rationale to select the Gauss probability density function in detail.
The state vectors of each STF were weighted by its corresponding probability and summed to calculate the estimated system state vector as follows:

Bayes’ law states

where

with
According to Ducard and Geering (2008), the intuitive explanation of probability density function is as follows: in the case of a single-input, single-output (SISO) problem, when the residual
However, when the conditional probability is calculated by multidimensional Gaussian probability density function, multiple integrals should be computed, indicating a large amount of calculation. The high real-time requirement of aircraft actuator fast fault diagnosis is difficult to satisfy. In this paper,
Therefore, in this paper, the Euclidean norm

In this manner, the multidimensional calculation was simplified to one dimension. The complex integral operation was avoided, and the calculation speed was highly improved. The ISTMMAE proposed in this paper reduced the calculation from MMAE by the Euclidean norm; furthermore, it reduced calculation from the normal STMMAE (Liu and Li, 2012) and improved STMMAE (Li, 2009; Zhou and Xiao, 2012) by the triangular decomposition method. Considering that the traditional EMMAE is widely used in engineering, the new FDI scheme proposed in this paper certainly has a better application potential.
Simulation results
Simulation conditions
In this paper, the simulation model is a small nonlinear unmanned air vehicle (UAV) model of six degrees of freedom, the same as that reported by Ducard and Geering (2006). The aerodynamic parameters are exactly the same. Two flaps and two elevators move independent of each other. The proportional-integral-derivative (PID) control aircraft autopilot is used to maintain the speed, height and posture.
The fault diagnosis system is composed of six filters, corresponding to the six situations: the no-fault filter
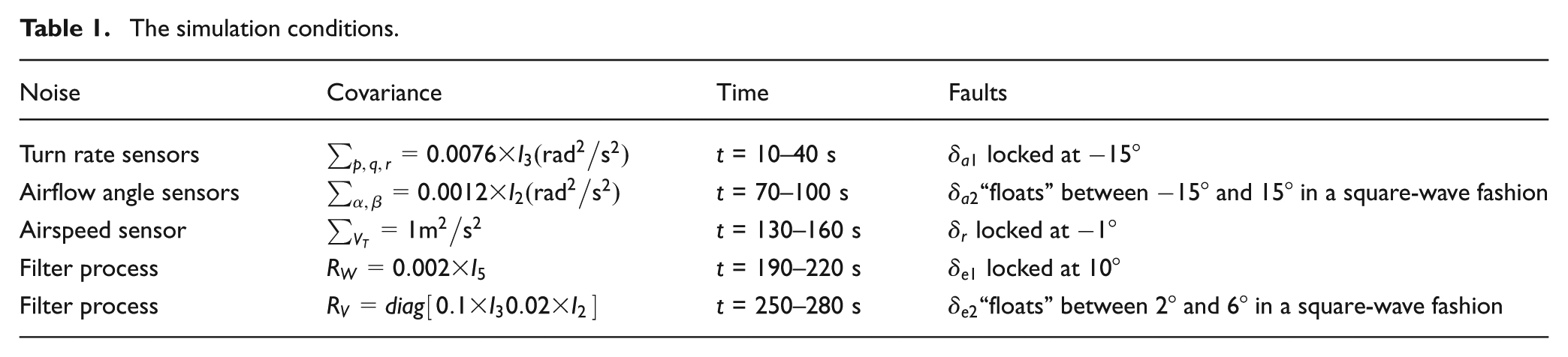
To obtain more realistic simulation results corresponding to the typical specifications of low-cost sensors, the sensor measurements were corrupted by zero-mean white Gaussian noise. The noise covariances are given in Table 1. A sequence of faults was also generated in Table 1.
The simulation conditions.
When the fault probability in (35) reaches zero, it may stays at zero forever. In order to prevent it, as soon as the probability reaches zero, we set the lower bound of each probability to be 0.001.
Analysis of simulation results
In the simulation diagrams, the black thick dotted line indicates the expected value (Figure 3 shows the excepted probability of the fault; Figure 4 shows the noiseless measurement; Figure 5 shows the real deflection of the actuator); the blue point dotted line indicates the simulation result by EMMAE (Ducard and Geering, 2008); the purple line shows the result of STMMAE and the improved STMMAE based on the triangular decomposition theory (the improved STF in Li (2009) and Zhou and Xiao (2012) were combined with the STMMAE in Liu and Li (2012); it shows that the simulation results of the three algorithms are the same); the red thick solid line is the result of the ISTMMAE proposed in this paper.
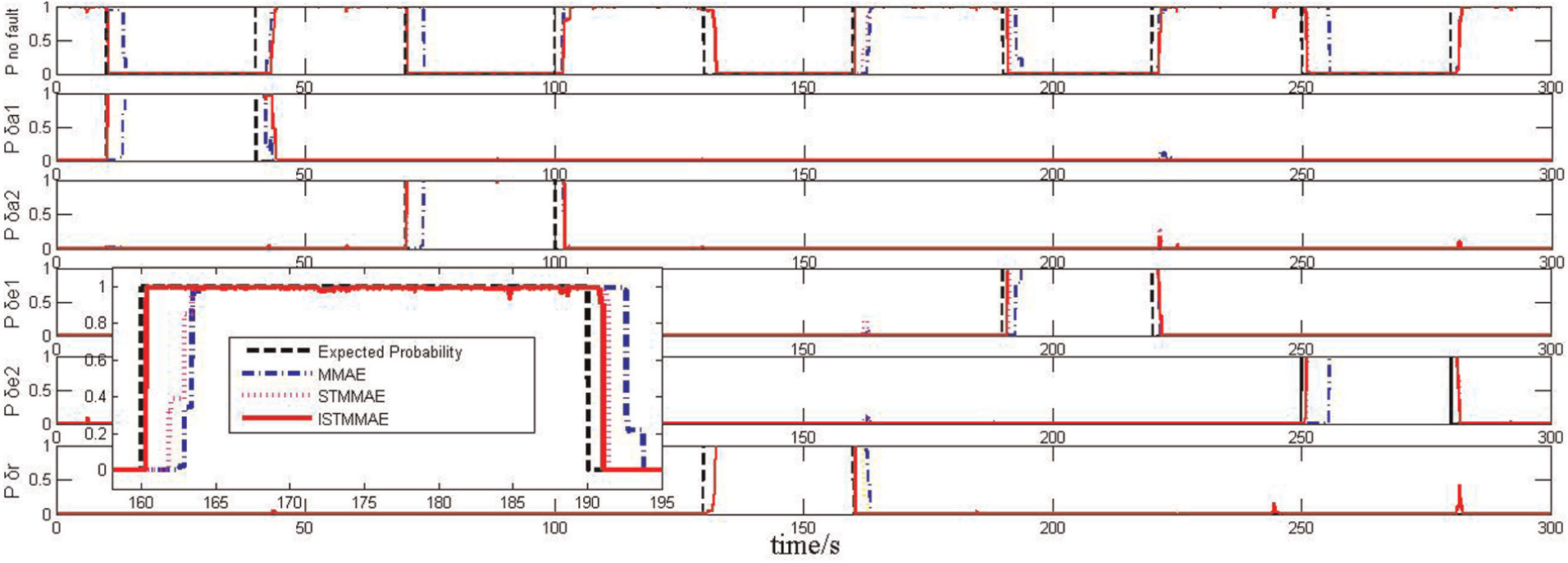
Probabilities from each filter based on different Fault Detection and Isolation schemes after a sequence of faults. (Colour online only.)
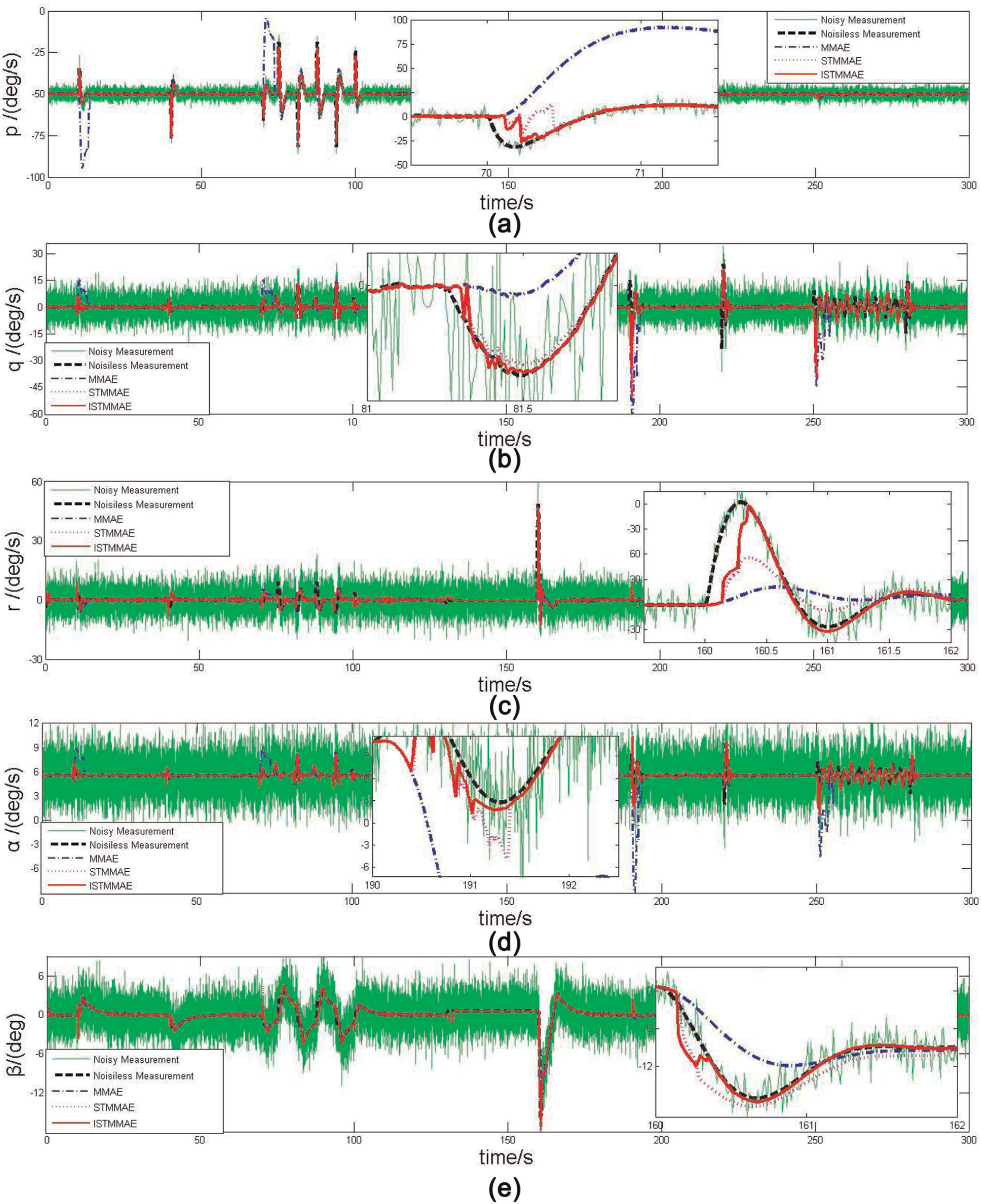
Comparison between measurements and the probability-weighted state estimate based on different Fault Detection and Isolation schemes. (Colour online only.)
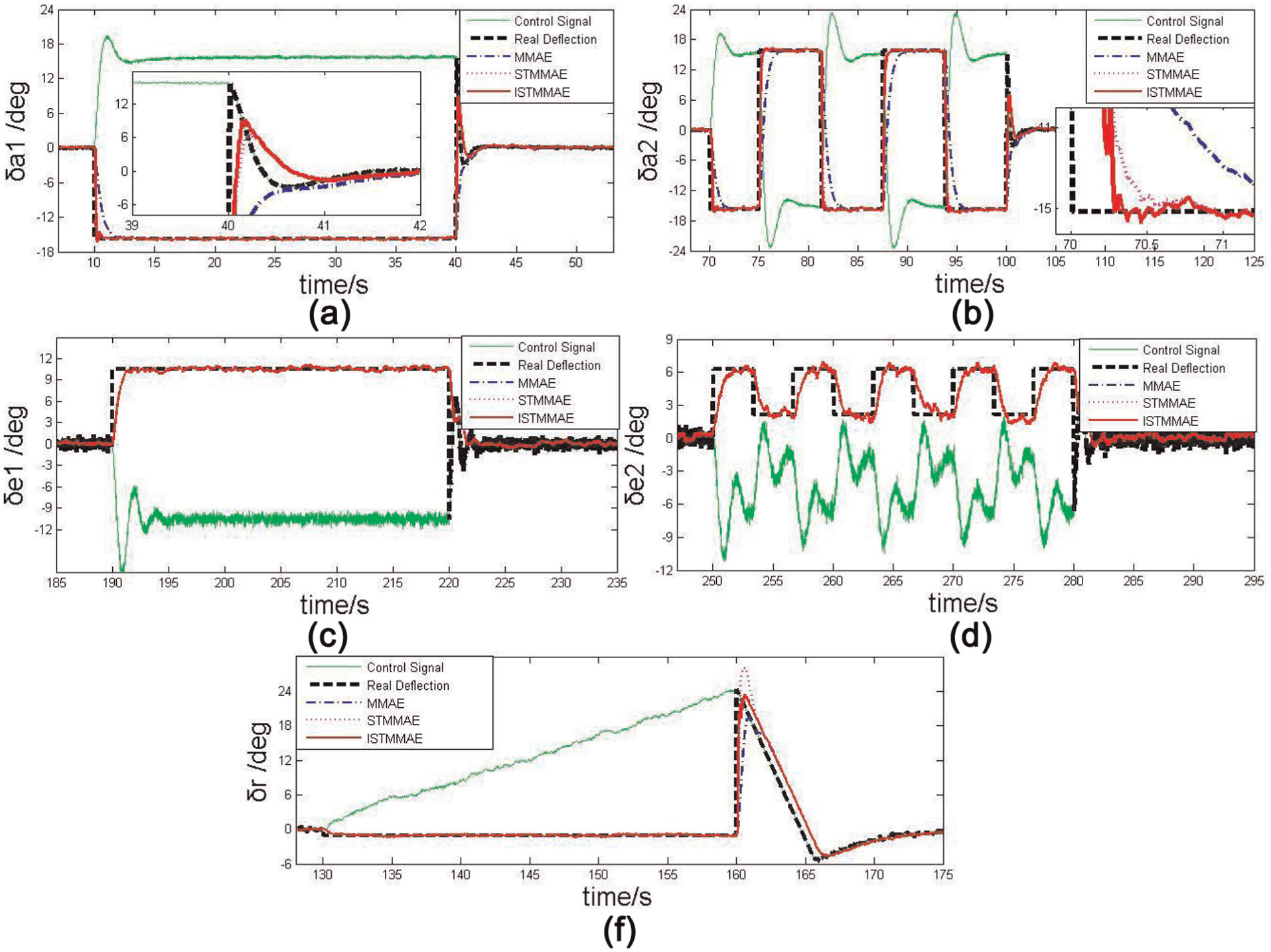
True actuator positions and associated estimates based on different Fault Detection and Isolation schemes. (Colour online only.)
Figure 3 shows the fault probability results detected by different FDI schemes. They separately represent no-fault, left aileron
Fault detection time is defined as follows: for an amount of time, the corresponding fault probability exceeds 90%, which means an actuator is at fault. For another amount of time, where the corresponding fault probability is less than 5%, we define the fault as being removed. For example, in Figure 3,
Table 2 shows the fault detection and removal time of each filter based on different FDI schemes. The first line shows the simulation result of the traditional EMMAE, which uses EKF and the multidimensional Gauss probability density function; the data came from Ducard and Geering (2008). The second line shows the result obtained from the EKF and the fast fault isolation method based on the Euclidean norm proposed in this paper. By comparing the first two lines of the simulation results, the fault detection time was significantly shortened by the fast fault isolation method. The third line shows the STMMAE in Liu and Li (2012) and improved STMMAE by the triangular decomposition method in Li (2009) and Zhou and Xiao (2012). It shows that the simulation results of the three algorithms are the same. The last line shows the result of the ISTMMAE proposed in this paper. The simulation results in Figure 3 and Table 2 show that the STMMAE in Liu and Li (2012) has improved the detection speed faster than the EMMAE. Furthermore, the ISTMMAE proposed in this paper shows the fastest fault detection speed among the four algorithms.
Fault detection time of each filter based on different Fault Detection and Isolation schemes.
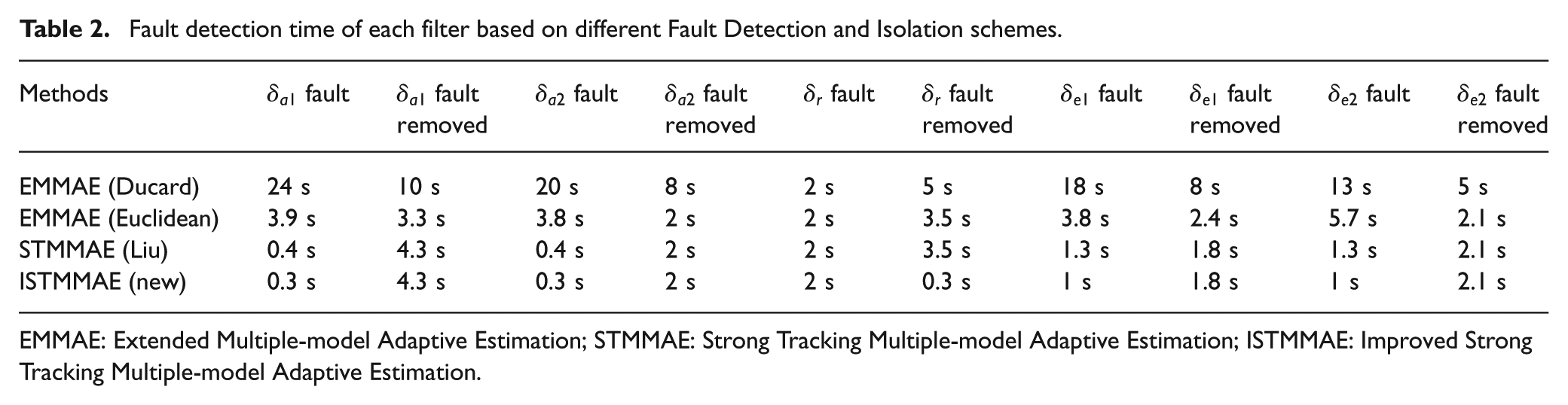
EMMAE: Extended Multiple-model Adaptive Estimation; STMMAE: Strong Tracking Multiple-model Adaptive Estimation; ISTMMAE: Improved Strong Tracking Multiple-model Adaptive Estimation.
Figure 4 shows the comparison between the noisy and noiseless measurements and the probability-weighted state estimate based on different FDI schemes. The small figure in the middle is the local amplification. The green thin solid line is the noisy measurement.
Figure 5 shows the comparison between the true actuator positions and associated estimates based on different FDI schemes (a position estimate is only valid during the occurrence of a fault). The green thin solid line shows the control input calculated by the PID autopilot.
The local amplification is clearly shown in Figures 4 and 5, and the root mean square error of state estimation and actuator estimation of four different kinds of methods is shown in Table 3. Among the four algorithms, the root mean square error of the ISTMMAE method proposed in this paper is the minimum. The ISTMMAE significantly improved the estimate accuracy, particularly when the abrupt fault appeared, thus fully indicating the strong tracking capability of the STF.
Root mean square error of state and actuator estimation.
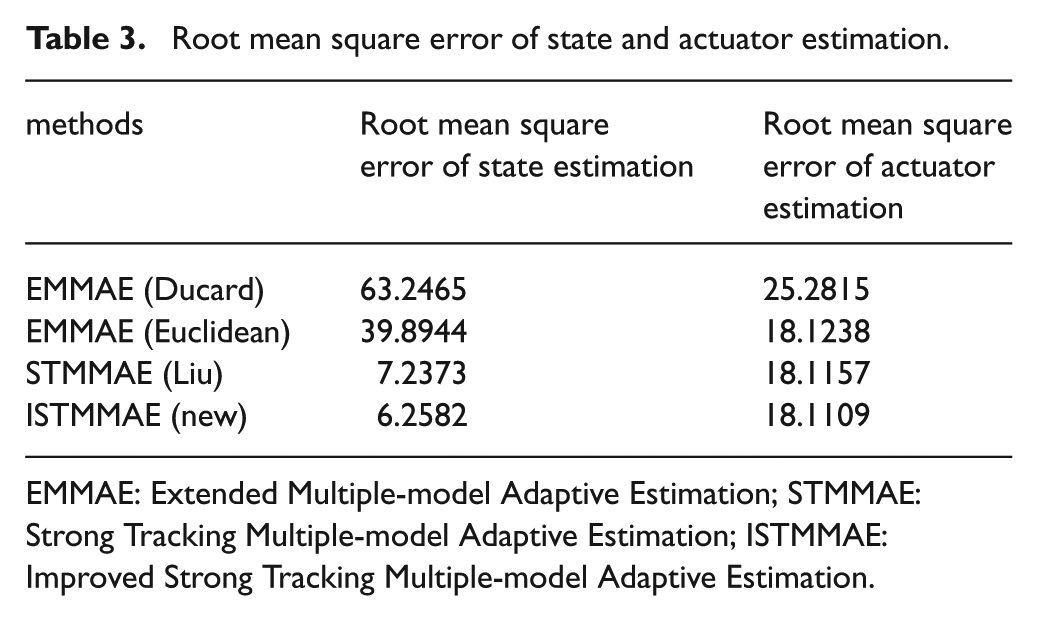
EMMAE: Extended Multiple-model Adaptive Estimation; STMMAE: Strong Tracking Multiple-model Adaptive Estimation; ISTMMAE: Improved Strong Tracking Multiple-model Adaptive Estimation.
Conclusion
For a typical aircraft actuator fault, the update equation of the state-error covariance matrix was improved by introducing multiple fading factors. The divergence problem of the filter was solved. The amount of computation was reduced. The estimation accuracy was also improved. By using the Euclidean norm, the dimension of fault probability calculation was reduced. The computation was reduced. A sequence of faults was simulated based on different FDI schemes. The simulation results show that the ISTMMAE proposed in this paper significantly improved the detection speed and the estimate accuracy compared with the EMMAE and also shows a better performance than the normal STMMAE or improved STMMAE by the triangular decomposition method.
Footnotes
Declaration of conflicting interest
The authors declare that there is no conflict of interest.
Funding
This work was supported by the National Science Foundation of China (60904038 and 61273141).