
Abstract
A denoising method for a hydropower unit vibration signal based on variational mode decomposition (VMD) and approximate entropy is proposed. The signal was decomposed by VMD into discrete numbers of modes, then the approximate entropy of each mode was computed. These modes were reconstructed according to a preset threshold of the approximate entropy. Finally, the denoising of the hydropower unit vibration signal can be achieved. A simulation signal and real signals of hydropower unit vibration were used to verify the proposed method. The results showed that the proposed method had a good denoising performance and was better than the wavelet transform method in the signal-to-noise ratio (SNR), root mean square error (RMSE) and partial correlation index. It was ideally suited for the online denoising of the hydropower unit vibration signal.
Introduction
The vibration and pressure fluctuation of a hydropower unit are important indexes for measuring the stability of the running unit (Zhang et al., 2013). In the process of vibration fault diagnosis of the hydropower units, signal processing is the key factor. During the vibration signal acquisition, due to a variety of noise interference, the collected signal may not truly reflect the operating status of the unit (Merkisz and Waligórski, 2014; Su et al., 2012; Wang et al., 2013). Therefore, fast and accurate extraction of the vibration signal from the noise is significant for the timely detection of equipment failure.
Chiementin et al. (2012) highlighted two aspects of denoising in vibration analysis, which included revealing singularities and noise elimination to keep the useful signal. They provided a reflection on the use of discrete wavelet transform through the various parameters used during processing. Wang et al. (2014) proposed a sub-band adaptive denoising method for detective impulsive signatures based on the minimum description length principle with improved normalized maximum likelihood density model. In the proposed method, the threshold is determined automatically, and the noise variance does not need to be estimated. Simulation and practical signals are used to verify the effectiveness of the method. Another effective method based on a second-generation wavelet transform for the denoising of electrocardiogram signals has been introduced by Li and Wang (2013). In this method, an improved half-soft threshold based on the lifting wavelet is utilized to overcome the drawbacks of thresholds applied in the classic wavelet. Ji et al. (2015) proposed a method based on identification, which uses adaptive noise cancellation to process the signal from the electromechanical inertial sensors. They built a semi-physical simulation based on the identification of sensor ontology to obtain the noise that is used as the background in the test. A normalized least-mean-squares method is used to abstract the sensor output that is used as an adaptive noise canceller. Cheng et al. (2014) reduced the strong noise of vibration signals of mining machinery gears by using a wavelet transform correlation filter, which is used to calculate the Shannon entropy of denoised wavelet coefficients. The entropy can reflect the vibration signal complexity. Experimental results showed that this method is effective for gear vibration signal processing in strong noise.
Wavelet transform (An et al., 2011; Gaied, 2015; Li and Wang, 2013; Li et al., 2014; Modarresi et al., 2014; Mondal et al., 2014; Su et al., 2013; Zhang et al., 2015) is a very common signal analysis technique. This method can analyse the time–frequency characteristics of the signal and has a variable resolution. The wavelet transform can decompose the signal into many signal components with different frequency bands (scale). Based on this feature, the signal can be filtered using this method. This is a basic premise: the wavelet transform is used to extract and reconstruct signal. However, mixing will arise between the different bands, as the window width of the wavelet is just a mean square equivalent concept. This means that the energy of a band is not entirely focused on this band, and it may leak into the adjacent bands. If the signal energy of different frequencies is similar, the method of setting some band signals to zero can be used to filter in order to ignore the energy leakage. However, if the difference of energy of different frequency signals is large, the leak of the large energy signal will overcome the adjacent band small energy signal. Empirical mode decomposition (EMD) (Luo et al., 2012; Wang et al., 2012) has a high frequency resolution and adaptive decomposition characteristics. However, it has drawbacks of mode mixing and end effect. For the mode mixing problem of the EMD, Dragomiretskiy and Zosso (2014) proposed a new variational mode decomposition (VMD), which can analyse non-linear and non-stationary signals, and solve the defects of the EMD.
Pincus proposed an approximate entropy theory (Kang et al., 2013; Pincus, 1991; Zhang and Liang, 2013), which uses a non-negative number to represent the complexity of a time series. The more complex the time series, the bigger the approximate entropy. Conversely, the more regular the time series, the smaller the approximate entropy. This theory has been successfully applied to the non-linear analysis of complex signal (Kang et al., 2013; Pincus, 1991; Zhang and Liang, 2013).
In this paper, a denoising method of a hydropower unit vibration signal based on the VMD and the approximate entropy is presented. Firstly, the VMD is used to decompose a noisy vibration signal into different modes of separate spectral bands. Then the approximate entropy of each mode is computed. The modes are reconstructed according to a preset threshold of the approximate entropy, then the denoising of the hydropower unit vibration signal can be achieved.
Variational mode decomposition
The VMD method is a novel variation method (Dragomiretskiy and Zosso, 2014), which can decompose a complex signal into discrete numbers of modes
The decomposition is given as follows:

where the
Using (2) to set the signal’s absolute integarable property:
The alternate direction method of multipliers (ADMM) is used in the VMD to produce different decomposed modes and the centre frequency during each shifting operation. The ADMM is given as:
(a) ADMM concept.
Initialize
Repeat

for
Update

end for
for
Update

end for
Dual ascent:

until convergence
(b) Minimization w.r.t.
The (3) is rewritten to update the modes
The Parseval/Plancherel Fourier isometry under the L2 norm is used to find the solution of this quadratic optimization problem, as follows:

(c) Minimization w.r.t.
The minimization w.r.t.



where the new
The obtained steps for the complete optimization of the VMD are given as:
Initialize
Repeat

for
Update

Update

end for
Dual ascent for all

until convergence:
Approximate entropy
The approximate entropy (Kang et al., 2013; Pincus, 1991; Zhang and Liang, 2013) is defined as an aggregation degree of phase vector in high-dimensional space. The complexity of time series is calculated from a multi-dimensional perspective, which includes the information of time pattern. For the time series of N points {u(i)}, the approximate entropy can be obtained through the following steps:
Step 1. The series {u(i)} consists of m-dimensional vectors X(i), i.e.

where the i = 1, 2, …, N-m + 1.
Step 2. For each i value, the distance between vector X(i) and the rest vectors X(j) is calculated.

where the j = 1, 2, …, N − m + 1.
Step 3. Giving a threshold valve r (r > 0), for each i value, the number of d[X(i), X(j)] < r is counted, and the ratio

Step 4. The logarithm of

Step 5. Repeat the processes of Step 1 to Step 4 for m + 1; the
Step 6. Finally, the approximate entropy is defined as

where the m is a preselected pattern dimension, r is the preselected similar tolerance. In the actual calculation, m = 2 and r = (0.1–0.2)SDx are usually used, where the SDx is the standard deviation of the time series {x(i), i = 1, 2, …, N}.
Denoising of hydropower unit vibration signal based on the VMD and the approximate entropy
The VMD can decompose a signal into an ensemble of band-limited intrinsic mode functions, and the noise is mainly concentrated in the high-frequency components. The approximate entropy can be used to describe the complexity of the non-linear dynamics parameters of the time series quantitatively. The procedure of the denoising of hydropower unit vibration signal based on the VMD and the approximate entropy contains the following three steps:
Use the VMD to decompose the noisy vibration signal of the hydropower unit into a discrete number of sub-signals (modes) ui.
Calculate the approximate entropy of each mode ui, and determine the threshold Ay of the approximate entropy.
These modes, where the approximate entropy is less than a given threshold Ay, are reconstructed to complete the denoising of hydropower unit vibration signal.
The signal-to-noise ratio (SNR) (Su et al., 2012), the root mean square error (RMSE), and the partial correlation index (Li et al., 2006) are defined to assess the denoising performance of the proposed method based on the VMD and the approximate entropy. Suppose
SNR:
RMSE:

Partial correlation index:
Simulation signal analysis
The vibration of hydropower unit is mainly affected by mechanical and hydraulic excitation. The mechanical excitations are mainly intermediate frequencies (one times, two times and three times the unit rotational speed). The hydraulic excitations are mainly low frequencies (0.2–0.45 times the unit rotational speed). In this paper, the following expression is used to simulate the vibration signal of the hydropower unit’s main shaft at guide bearing:

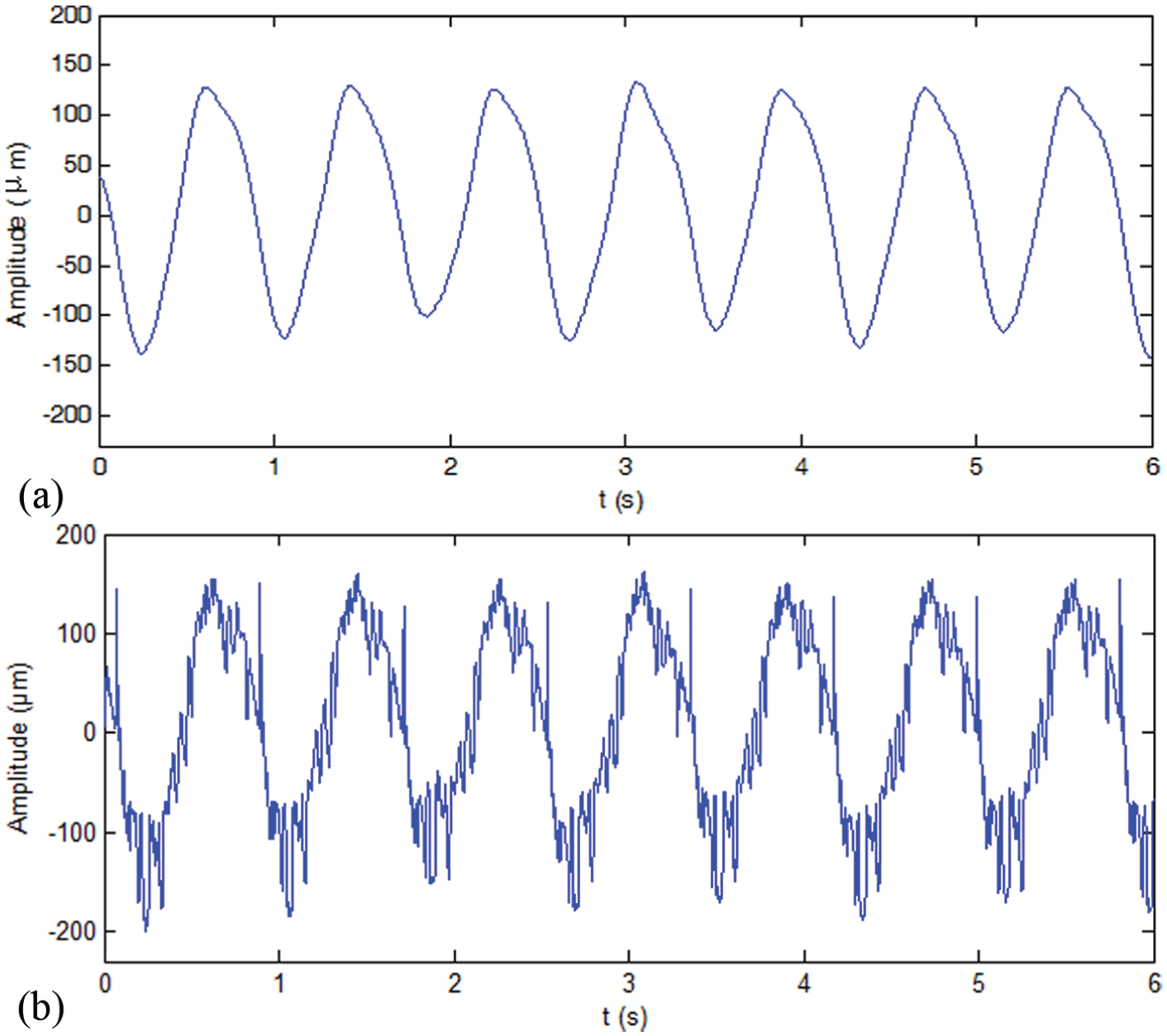
where A1–A6 are 20, 4.5, 2.55, 1.5, 0.4 and 0.3 μm, respectively; f1–f6 are 1.25, 2 × 1.25, 3 × 1.25, 4 × 1.25, 0.2 × 1.25 and 0.3 × 1.25 Hz, respectively. The sampling frequency is 1000 Hz. The simulation vibration signal of the hydropower unit is shown in Figure 1(a). A shock signal with a period of 1.25 Hz was added to the signal and each shock sustained for 3 ms, then a Gaussian white noise with SNR of 20 db was also added to the signal. The signal with shock and noise is shown Figure 1(b).
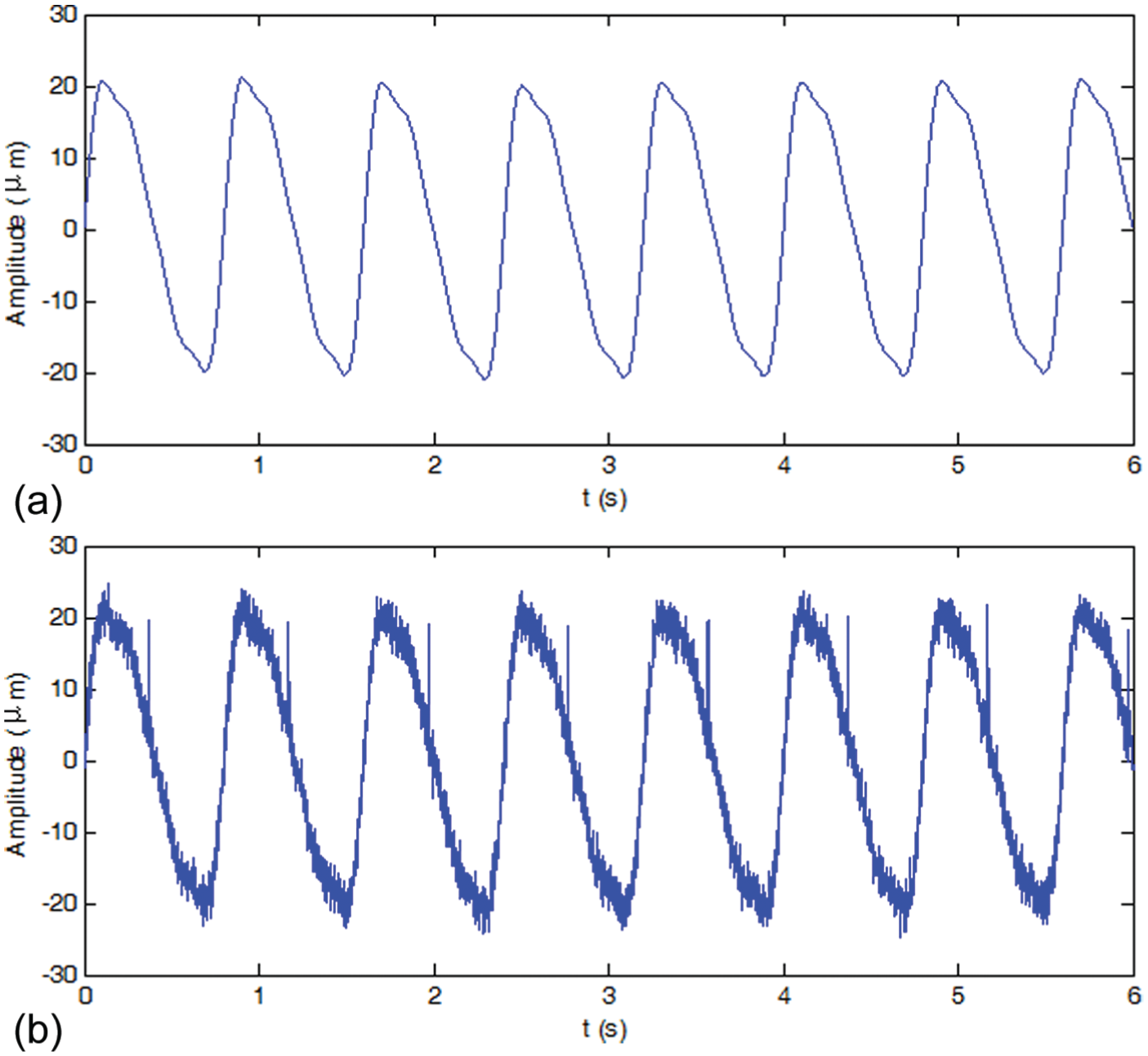
Simulation signal of the hydropower unit vibration.
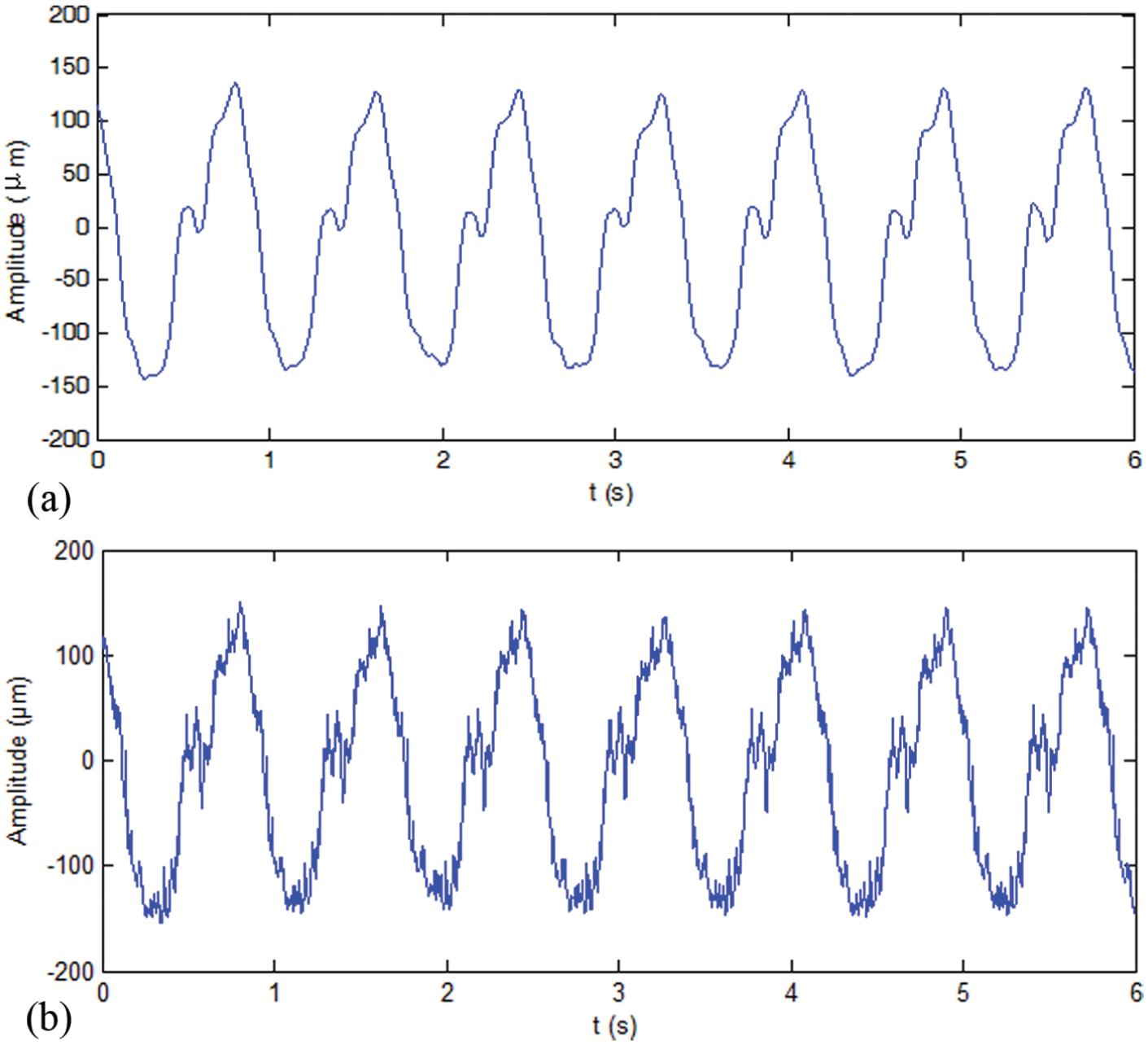
The VMD is used to decompose the noisy signal into 10 components (Figure 2). The approximate entropy of these components is computed (Table 1). It can be seen from the table that the approximate entropies of the u3–u10 are significantly greater than the others. On the basis of the rule that the approximate entropy threshold is less than 0.4, the u1–u2 are summed to complete the denoising of the hydropower unit vibration signal. Figure 3(a) shows the results of the denoising method based on the VMD.
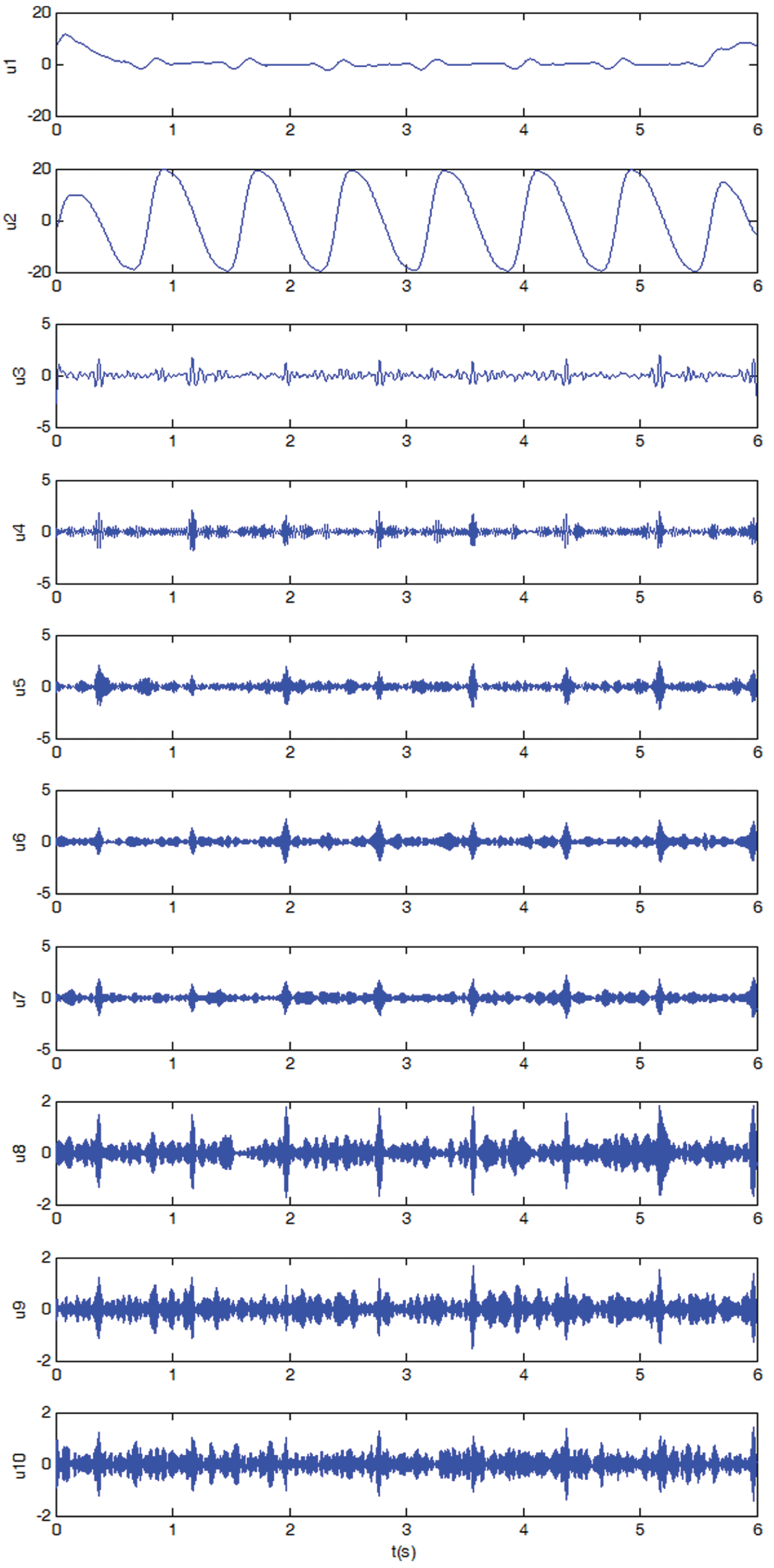
Variational mode decomposition (VMD) decomposition of the vibration signal.
Approximate entropy of each component.

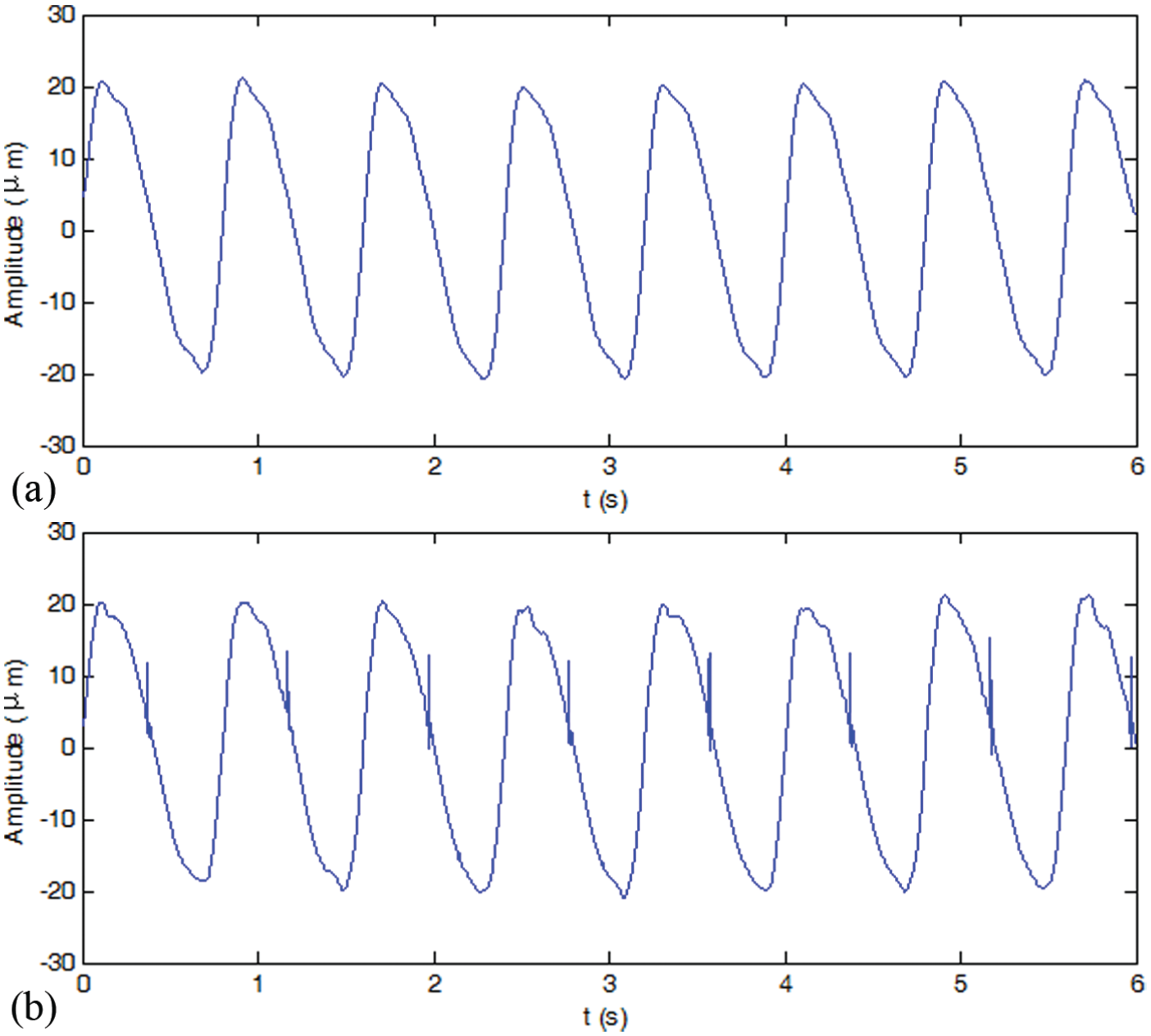
The results of simulation signals after denoising.
The wavelet transform is widely used in signal denoising. In this paper, the db4 wavelet is used to process the noisy signal as shown in Figure 1(b). For purposes of comparison, the decomposition level is also 10 layers. The common sqtwolog is used as the threshold in processing. The results using the db4 wavelet are shown in Figure 3(b).
A comparison of the denoising performance of the two methods is shown in Table 2. It can be seen from the table that three indicators of the SNR, the RMSE and the correlation coefficient in the VMD-based method are better than that in the db4 wavelet method, i.e. the VMD-based method has a better denoising performance. It can be seen from Figure 3 that db4 wavelet is not great for the removal of periodic shock noise.
Comparison of denoising performance of the two methods.

VMD, variational mode decomposition.
Case study
The field test data from a large hydropower unit were used to verify denoise performance of the proposed method. The data included the main shaft vibration signal of hydropower unit at the generator upper guide bearing, the generator lower guide bearing and the turbine guide bearing. The speed of the unit was 75 rpm, the sampling frequency of the test was 1000 Hz and the number of sampling points is 6000.
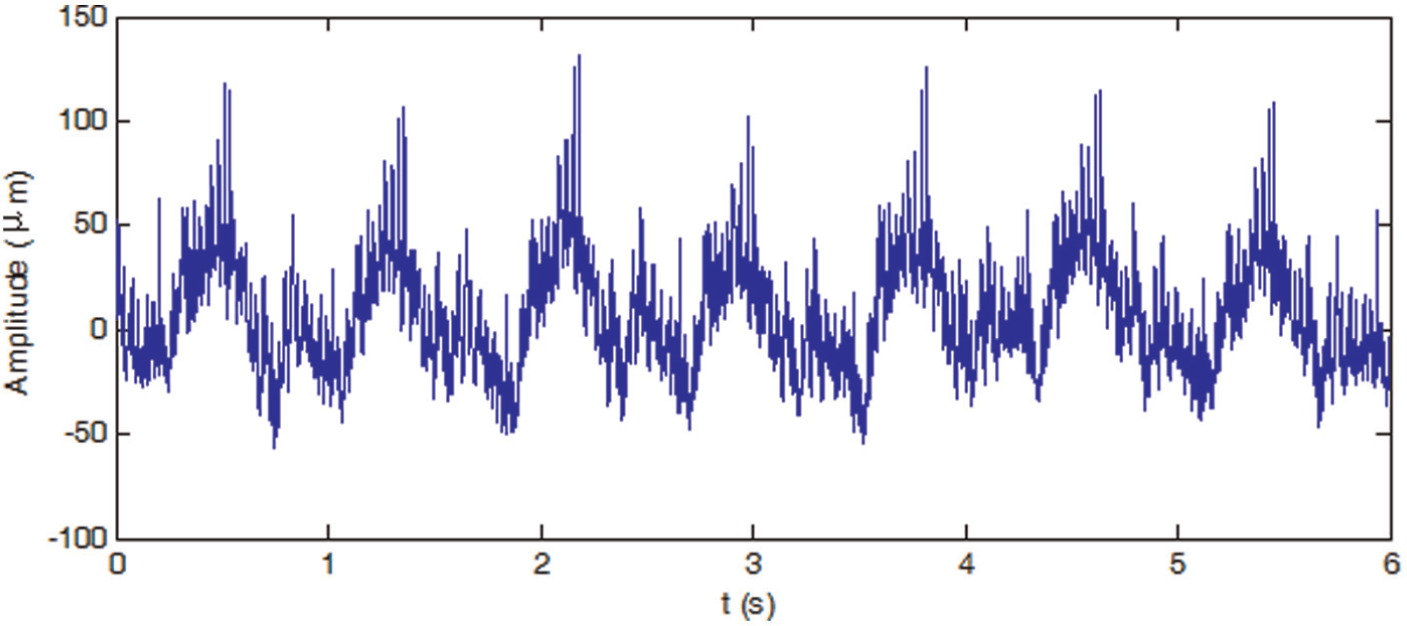
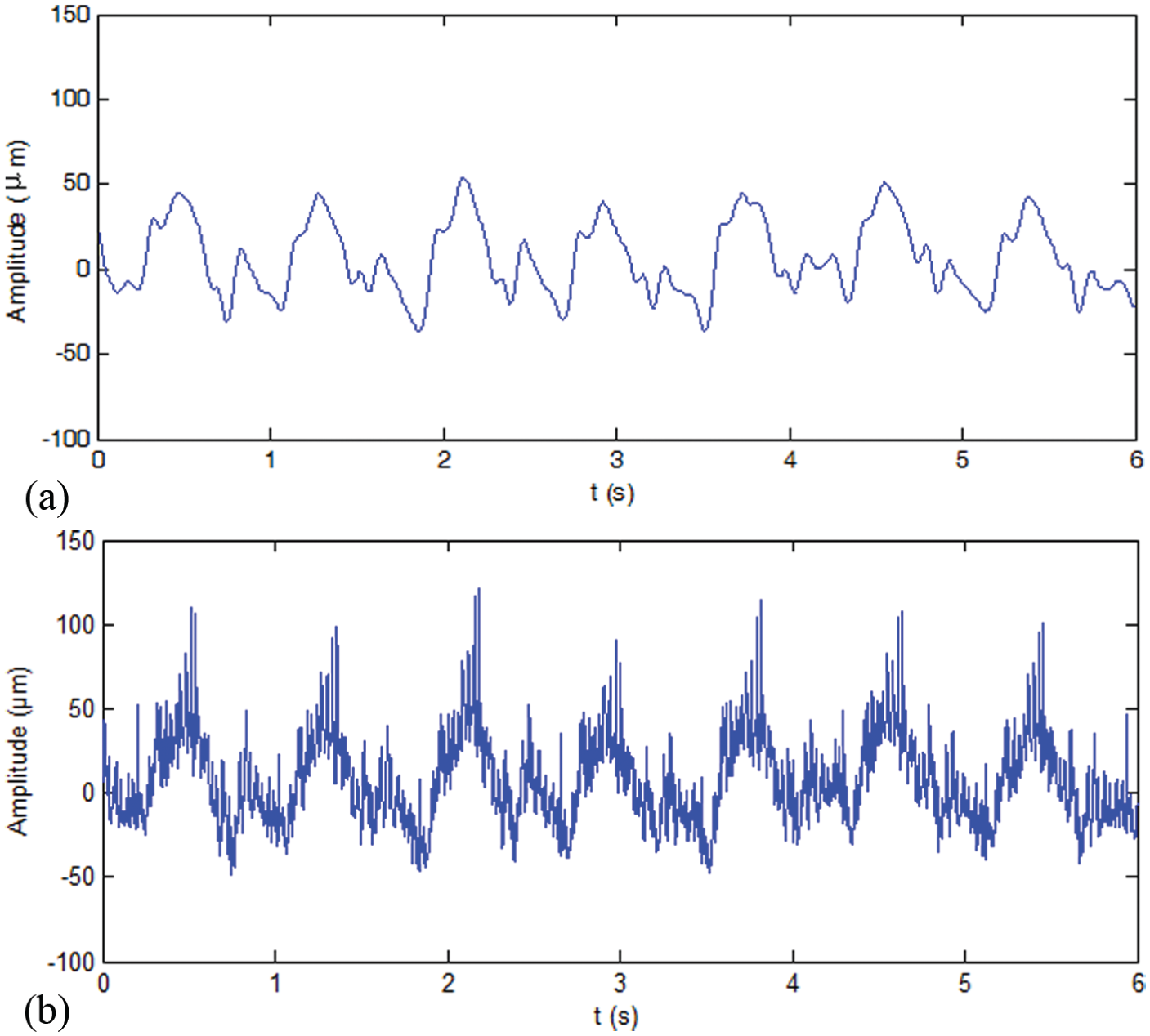
The real signal of shaft vibration at the generator upper guide bearing of the hydropower unit is shown in Figure 4. It can be seen from the figure that the vibration waveform contains a lot of noise and periodic shocks. The period of the shocks was the rotational frequency of the unit. The shocks resulted from the coarse main shaft of the unit. The VMD was used to decompose this signal into 10 components. The approximate entropy of each component was calculated and the results are shown in Table 3. It can be seen from the table that the approximate entropy of u1 is significantly less than the rest. On the basis of the rule that the approximate entropy threshold is less than 0.4, the u1 itself was the denoised signal of shaft vibration at the generator upper guide bearing of the hydropower unit. Figure 5(a) shows the results of the VMD-based denoising method. It can be seen from the figure that the VMD method can eliminate a lot of noise and periodic shocks of shaft vibration signal at the generator upper guide bearing.
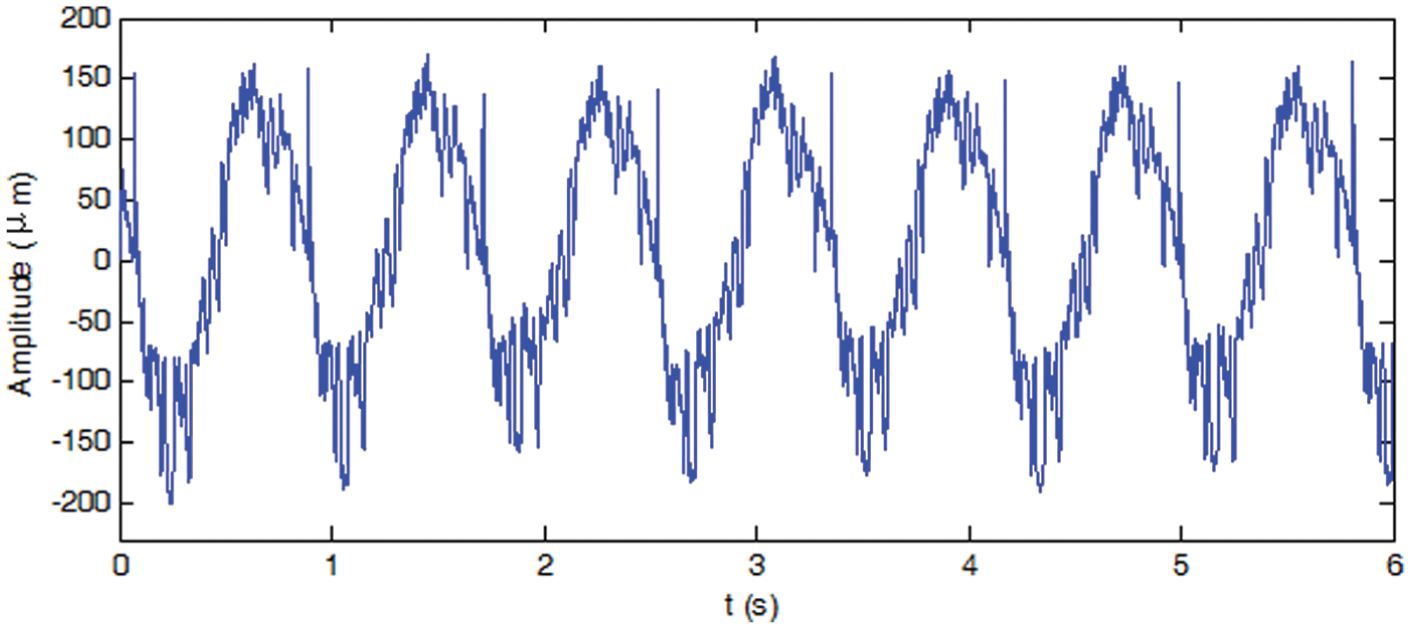
Real signals of shaft vibration signal at generator upper guide bearing of the hydropower unit.
Approximate entropy of shaft vibration signal’s components at generator upper guide bearing.

Denoised shaft vibration signal at generator upper guide bearing.
Figure 5(b) shows the results based on db4-wavelet denoising method. For the purposes of comparison, the decomposition level was also 10 layers. The common sqtwolog was used as the threshold in processing. It can be seen from the figure that the db4-wavelet method cannot remove the periodic shocks noise and the background noise of shaft vibration signal at the generator upper guide bearing well.
The real shaft vibration signal of the hydropower unit at the generator lower guide bearing and the turbine guide bearing are shown in Figures 6 and 8, respectively. It can be seen from the figures that the two vibration signals contain considerable noise. The VMD was used to decompose the two signals and 10 components for each signal can be obtained. The approximate entropy of each component was calculated, and the results are shown in Tables 4 and 5. On the basis of the rule that the approximate entropy threshold is less than 0.4, the components u1–u3 of shaft vibration signal at generator lower guide bearing were summed to achieve the denoising of this signal (Figure 7a). The components u1–u2 of the shaft vibration signal at the turbine guide bearing were summed to achieve the denoising of this signal (Figure 9a). It can be seen from the Figures 7(a) and 9(a) that the VMD-based method can remove a lot of noise from shaft vibration signal of the hydropower unit at the generator lower guide bearing and the turbine guide bearing.

Real signals of shaft vibration signal at generator lower guide bearing of the hydropower unit.
Approximate entropy of shaft vibration signal’s components at generator lower guide bearing.

Approximate entropy of shaft vibration signal’s components at turbine guide bearing.

Denoised shaft vibration signal at generator lower guide bearing.
Real signals of shaft vibration signal at turbine guide bearing of the hydropower unit.
Denoised shaft vibration signal at turbine guide bearing.
The results of the shaft vibration signal at the generator lower guide bearing and the turbine guide bearing using the db4-wavelet method are shown in Figures 7(b) and 9(b), respectively. For purposes of comparison, the decomposition level of the two signals was also 10 layers. The sqtwolog was used as the processing threshold. It can be seen from the two figures that the db4-wavelet method cannot remove the periodic shocks noise and the background noise of the shaft vibration signal at the generator lower guide bearing and the turbine guide bearing well.
Conclusions
This paper presents a denoising method for the hydropower unit vibration signal based on the VMD and the approximate entropy. The VMD was used to decompose a noisy vibration signal into a discrete number of sub-signals (modes). The criterion of the approximate entropy threshold was used to determine the number of reconstructed modes, then the denoising of the hydropower unit vibration signal was completed. The simulation signal and the real signals of the hydropower unit vibration were used to verify the proposed method. The results showed that the VMD-based denoising method can eliminate a lot of background noise and periodic shocks of the main shaft vibration signal of the hydropower unit at the generator upper guide bearing, the generator lower guide bearing and the turbine guide bearing. The db4-wavelet denoising method cannot remove the periodic shocks noise and background noise of these three vibration signals well. This means that the denoising performance of traditional signal processing method (e.g. wavelet transform) for the unit vibration signal is unfavourable, whereas the VMD-based method has very good denoising performance. Therefore, the proposed method is very suitable for the real-time noise cancellation of the hydropower unit vibration signals, and the real operating conditions of the hydropower unit can be obtained quickly and accurately.
Footnotes
Declaration of conflicting interest
The authors declare that there is no conflict of interest.
Funding
This work was supported by the National Natural Science Foundation of China (grant number 51309258).