
Abstract
Robot-assisted surgery is being widely used as an effective approach to improve the performance of surgical procedures. Autonomous control of surgical robots is essential for tele-surgery with time delay and increased patient safety. In order to improve safety and reliability of the surgical procedure of tissue compression and heating, a control strategy for simultaneously automating the surgical task is presented in this paper. First, the electrosurgical procedure such as vessel closure that involves tissue compression and heating has been modelled with a multiple-input–multiple-output (MIMO) non-linear system for automation simultaneous. After linearizing the models, the linear-quadratic Gaussian (LQG) is used to control the tissue compression process and tissue heating process, and the particle swarm optimization (PSO) algorithm was used to choose the optimal weighting matrices for the LQG controllers according to the desired controlling accuracy. The LQG controllers with optimal weights were able to track both the tissue compression and temperature references in finite time horizon and with minimal error (tissue compression – the max absolute error was
Introduction
Robot-assisted surgery is increasingly being used in various surgical procedures (Nezhat et al., 2005). The benefits of robot-assisted surgery include reduced patient trauma, shortened recovery time, increased dexterity, elimination of tremors, motion scaling and increased ergonomics that reduces fatigue for the operating surgeon (Feng et al., 2012). Though current robot-assisted surgical procedures are performed with a robot faithfully following the surgeon’s hand motion in a master–slave teleoperation system, semi or fully autonomous control of surgical tasks will allow surgeons to let the robot finish tasks with more precision or accuracy, such as applying forces and temperatures to tissues, and eventually improving the safety and reliability of surgical procedure (Feng et al., 2012; Kanno et al., 2013; Low and Phee, 2006). Previous work on automation in robot-assisted surgery has focused on tissue compression (Sankaranarayanan et al., 2011; Yu, 2008; Yu and Chizeck, 2008a, 2008b; Yu et al., 2007) or tissue retraction (Patil and Alterovitz, 2010). However, simultaneous compression and heating of tissue are common electrosurgical procedures, such as vessel closure, dissection and coagulation.
In order to automate a surgical procedure, two steps need to be followed. First, a system model needs to be derived to describe the process of interest mathematically (Patil and Alterovitz, 2010; Sankaranarayanan et al., 2011; Yu, 2008; Yu and Chizeck, 2008a, 2008b; Yu et al., 2007). For the models of surgical tasks, there have been some research results that mainly include tissue compression (Patil and Alterovitz, 2010; Sankaranarayanan et al., 2011; Yu, 2008), tissue impedance (Belmont et al., 2013; Dodde, 2011) and tissue temperature models (Mandel et al. 2013). These models are non-linear, the equations of which are obtained based on experimental data. However, there is a lack of a systematic modelling or comprehensive application for the overall surgical procedure. In this paper, these models and experiment data will be comprehensively used to design a controller for surgical automation. The second step is the design of control algorithms based on the system model (Patil and Alterovitz, 2010; Sankaranarayanan et al., 2011; Yu, 2008; Yu et al., 2008). Relevant control approaches studied in the references include robot force control, robot impedance control, automatic needle placement, automatic ligation and force control of knot tying (Yu, 2008). However, the system models of surgical tasks, especially the temperature model, are rarely seen in the control design in these references. Our preliminary work on designing a PID controller for tissue compression and heating was the first work of its kind in automation of a surgical task (Sinha et al., 2014). Although some optimal control algorithms have been used in automatic control design (Lewis et al., 2012), they have rarely been seen in surgical robot design to obtain a more effective, robust and accurate controller.
In this paper, we present the control strategy for simultaneously automating the surgical task of tissue compression and heating to improve safety and reliability of the surgical procedure. Figure 1 shows a general overview of the environment to which our autonomous control strategy was applied. A robotic gripper clamps down on a piece of tissue and applies an AC current in order to desiccate it. Our goal is to develop a controller that can drive the gripper to compress the tissue to a desired thickness and then heat it up to the desiccation temperature. However, the model of tissue compression and heating is a non-linear multiple-input–multiple-output (MIMO) system. In this work, feedback linearization was used to cancel the non-linearities and a linear-quadratic Gaussian (LQG) controller was used to track the desired tissue compression and temperature. LQG is the combination of a Kalman filter, such as a linear-quadratic estimator (LQE), with a linear-quadratic regulator (LQR) (Hespanha, 2014; Rowley and Batten, 2014). The controller based on LQG is one of the most fundamental optimal algorithms. However, selecting the optimum values of the weighting matrices for the LQG is the key procedure for the LQG controller development. The common approach to select the weighting matrices is via trial and error (Das et al., 2013; Hespanha, 2014; Mohd et al., 2012; Rowley and Batten, 2014), but this method is time consuming, cumbersome and results in a non-optimized performance. Therefore, optimal selections of weighting matrices have been used in many prior works in recent years (Das et al., 2013; Mobayen et al., 2011; Mohd et al., 2012). In this paper, a PSO method was used to find the best weighting matrices for making the surgical robot finish tasks with a desired accuracy (Meng et al., 2014; Mobayen et al., 2011; Mohd et al., 2012).
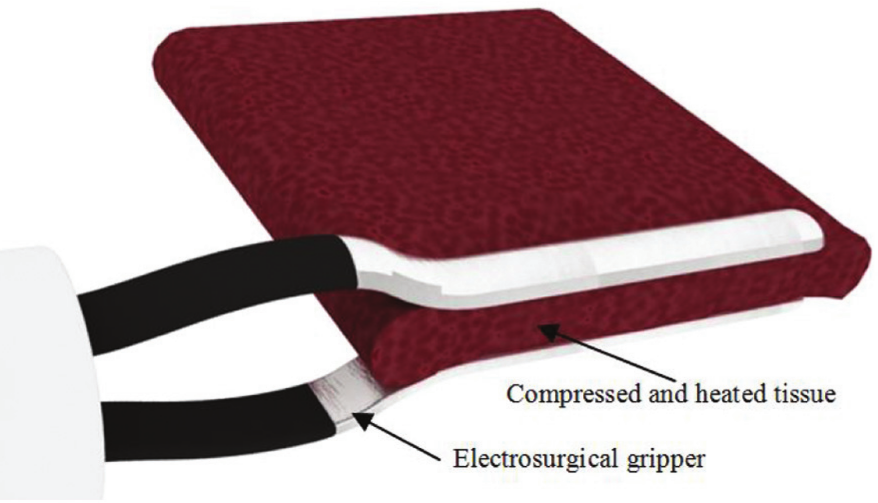
Electrosurgery on a block of tissue.
System modelling
In order to automate the electrosurgical task, which is a non-linear MIMO system with both tissue compression and heat constraints, it is broken down into three components: a tissue compression model, tissue impedance model and tissue temperature model. According to the electrosurgical task in this paper and the related research results (Belmont et al., 2013; Berjano, 2006; Dodde, 2011; Kim, 2008; Sommer et al., 2013; Yu, 2008), the following assumptions were made: movement of the mass is restricted to one direction and only resistive heating is modelled. The following sections go through the process of creating the models of tissue compression, impedance and temperature, which are then applied to the controller development.
Tissue compression model
Soft tissues exhibit an exponential-like response when forces are applied to them (Yu, 2008). Therefore, the one-dimensional (1D) tissue dynamics can be modelled through a mass-spring-damper system with a non-linear spring, as shown in Figure 2.
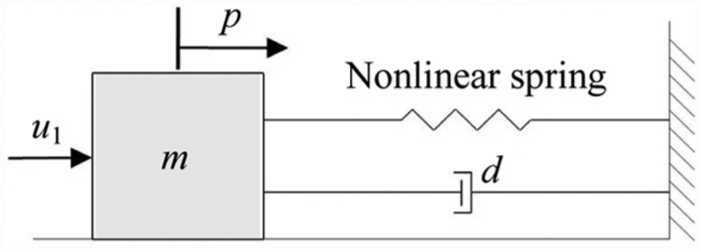
Mass-spring-damper model.
The non-linearity of the spring in this model can be described by the Blatz-Ko model, which was created by William L. Ko and P.J. Blatz for applications in elastic theory (Rosen et al., 2008; Yu, 2008). Therefore, the tissue dynamics model can now be written as:
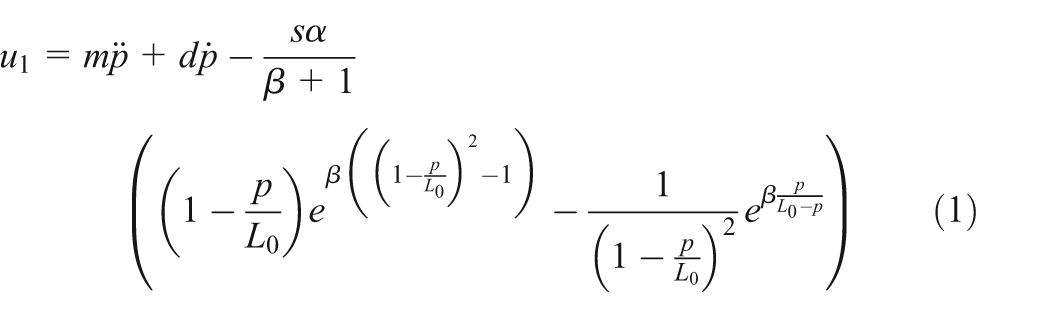
where
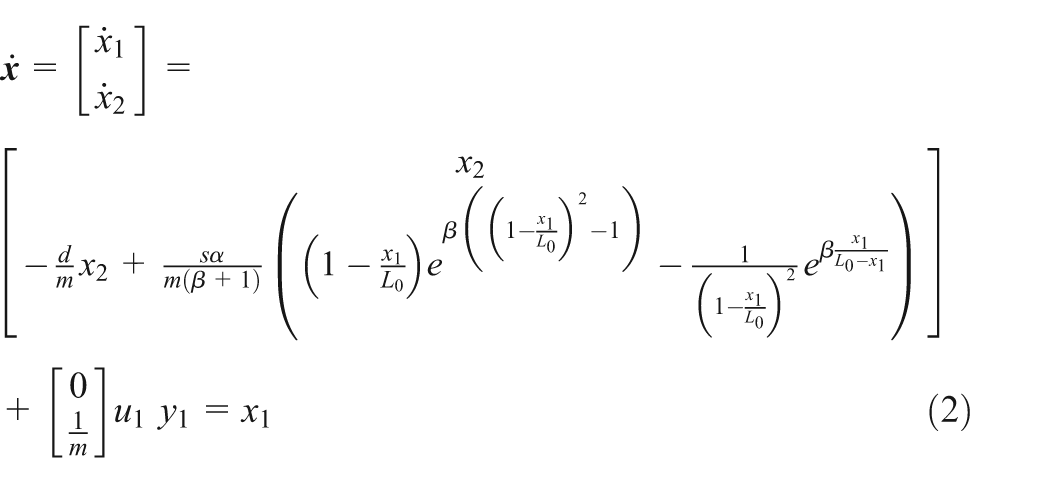
For the implementation of the controller, let
Tissue impedance model
The impedance of the tissue is formulated based on the results of research on the bioimpedance of soft tissue under compression (Dodde, 2011). The tissue impedance can be represented by a Cole–Cole model as shown in Figure 3, where
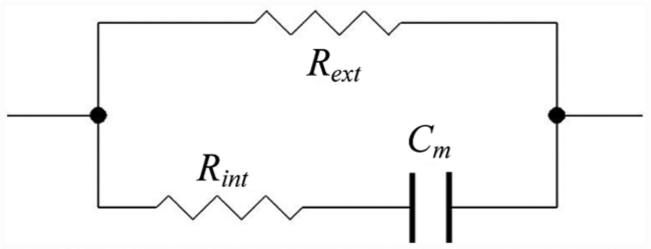
Soft-tissue impedance model.
The total impedance of the tissue can be written as:
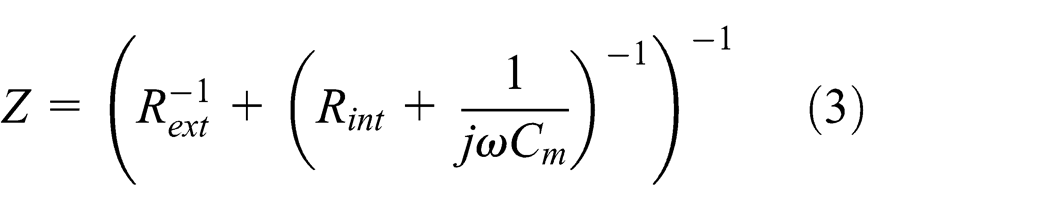
where
In order to characterize the non-linearity of
Figure 4 shows the resistance or capacitance of each component with respect to compression ratio, and the maximum compression ratio in the plots above is limited to 0.8. This is because, at very high compression ratios, the tissue undergoes structural breakdown, which affect its electrical properties. Moreover, the amount of force needed to accomplish high compression ratio exceeds the capabilities of a surgical robotic grippers. Therefore, any data gathered for compression ratio above 0.8 is disregarded. The following polynomial Equations (4)–(6) are the best-fit curve for each component.



where
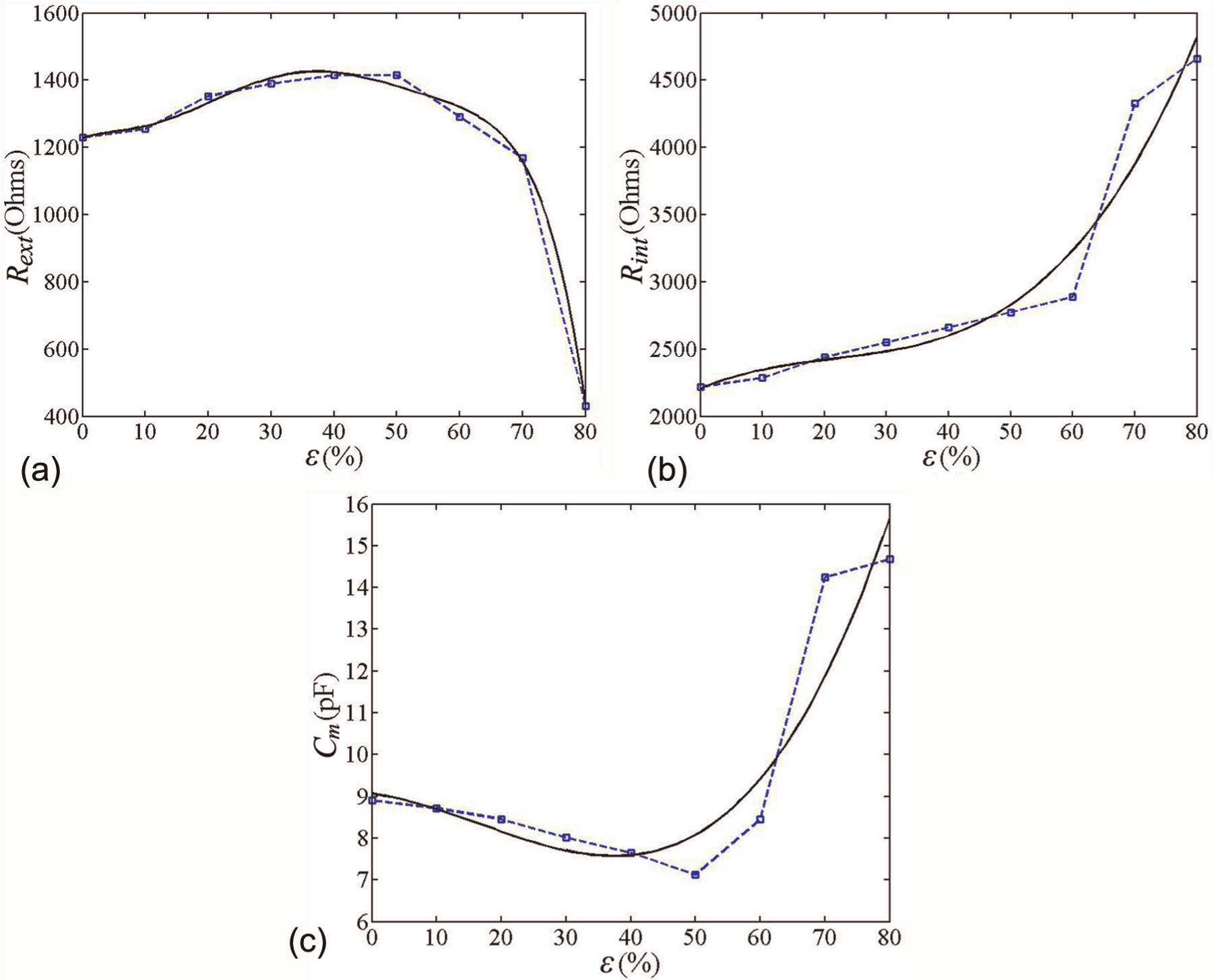
Best-fit curves for each component of Cole–Cole model: (a) best-fit curve for
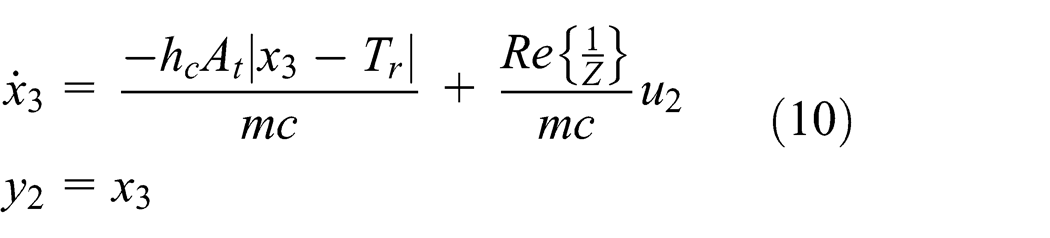
Tissue temperature model
The tissue temperature model describes the voltage-to-temperature map. With the impedance

where

where
Combining Equations (7) and (8), the temperature model of tissue can be written as:

where
Let
With compression, impedance and temperature models accounted for, the overall system model has been obtained. It is obvious that the system is a non-linear MIMO system, where the inputs are force and voltage and the outputs are compressed displacement, impedance and temperature.
Controller design
Because precision or accuracy is very important to surgery, the key aspect of this work is to develop a controller that can successfully control surgical tool attached to the robotic end effectors to finish surgical tasks with minimal deviation and in a finite time horizon according to the compression and temperature trajectories. In order to realize the demand, a modular approach is taken for developing the controller, i.e. the tissue compression and tissue heat dissipation models are separately linearized and then LQG controllers are applied to each part.
Linearization of system models
Tissue compression model defined in Equation (2) is a second order non-linear system with a relative degree of 2. Thus, it has no zero dynamics and can be fully linearized. By utilizing the state feedback control law (Khalil and Grizzle, 2002), the linearized tissue compression model can be given in state-space form by:
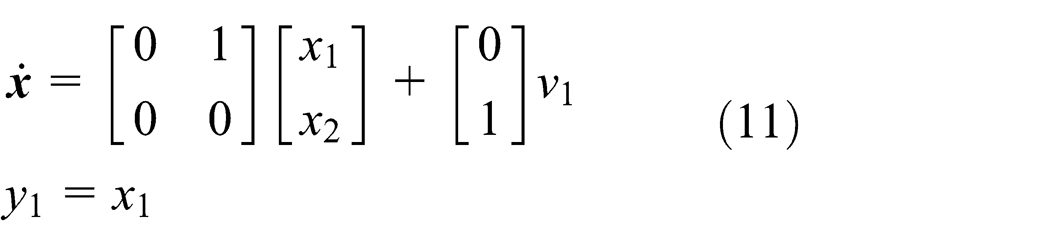
where

where
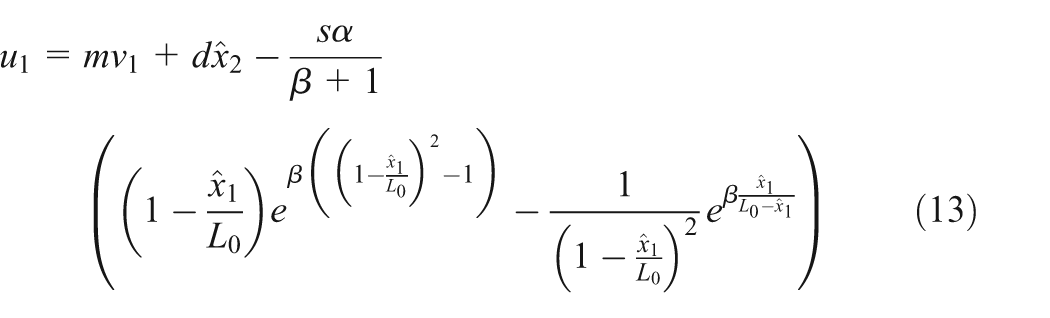
Combining Equations (2), (11) and (12), the original input (force applied tissue)
Similarly, the tissue temperature model defined in Equation (10) is a first-order non-linear system with a relative degree of 1. Therefore, it has no zero dynamics and is fully linearizable. The feedback control law is applied once again and the linearized tissue temperature model can be given in state-space form:

where

where
Combining Equations (10), (14) and (15), the original input (voltage applied tissue)

Optimum controller design based on LQG
The system models have been linearized in Linearization of system models section. Now the LQG controlling strategy can be used for designing the controllers applied to tissue compression and tissue heating models separately. LQG regulator is formed by connecting the Kalman filter or estimator and the optimal state-feedback gain designed with LQR. The Kalman estimator can not only filter the disturbance and noise from inputs and measurements but can also estimate the system state values according to inputs and outputs. Therefore, controllers based on LQG are dynamic and rely on noisy output measurements to generate controlling commands. Combining the linearized system models and LQG design method (Hespanha, 2014), the control scheme based on LQG for the overall system model can be given, as shown in Figure 5, where
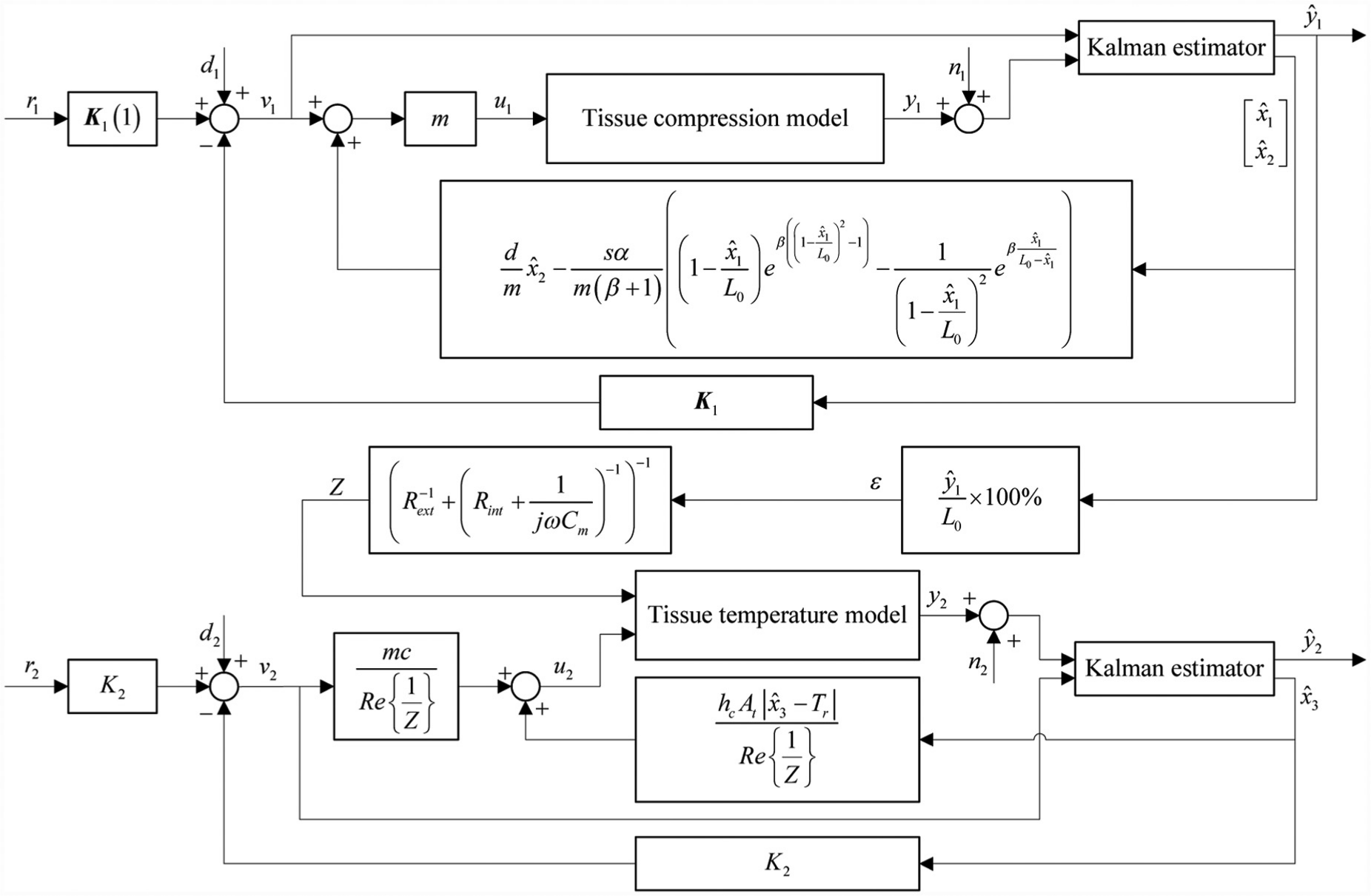
Cartoon control scheme based on linear-quadratic Gaussian (LQG) for the overall system model.
Determination of optimal weight matrices (
Q
and
R
) for LQG based on PSO
With the control strategy in this paper, the most important part is to find the optimal state-feedback gains (

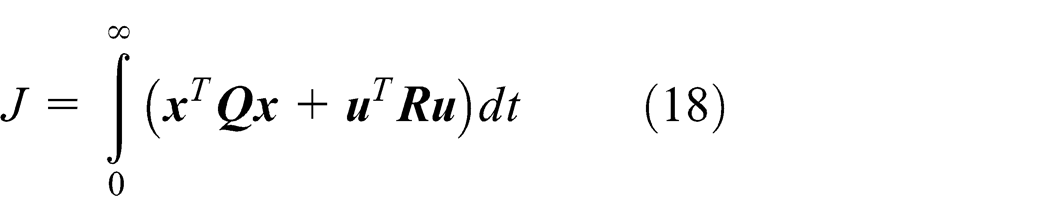
where
According to the LQR law (Hespanha, 2014), the optimal state feedback can be calculated:

where


In order to choose the appropriate weight matrices (


where
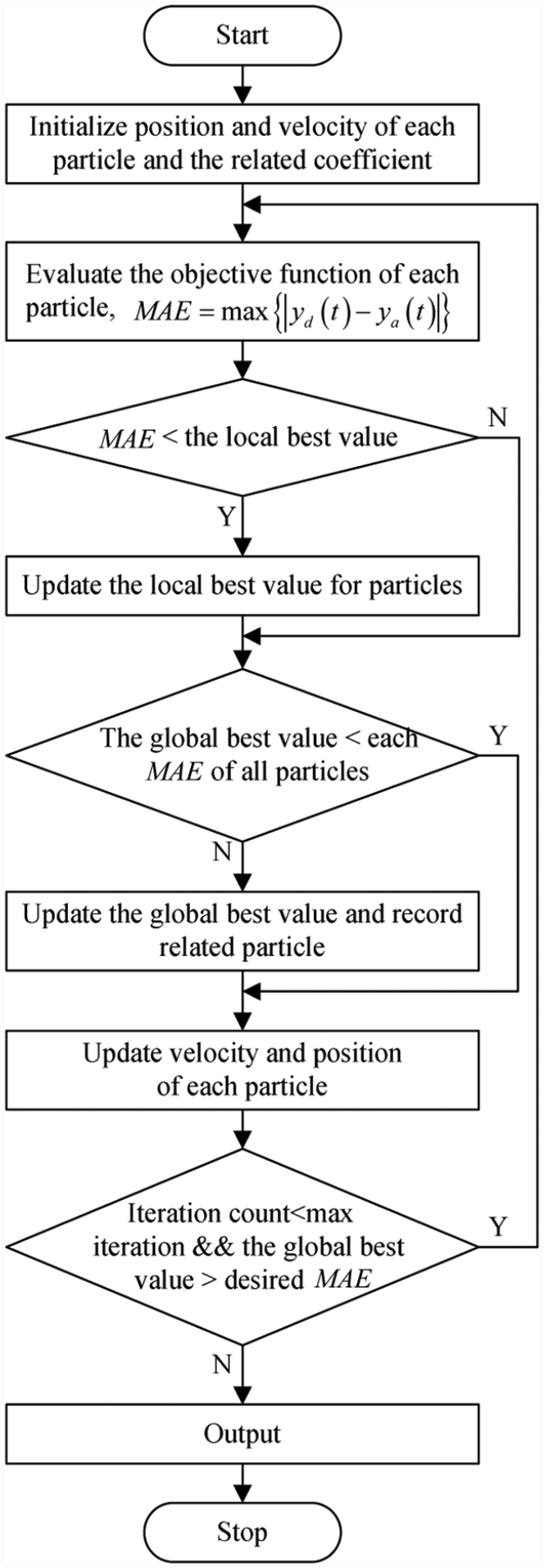
Flow chart of the calculation process of
Results
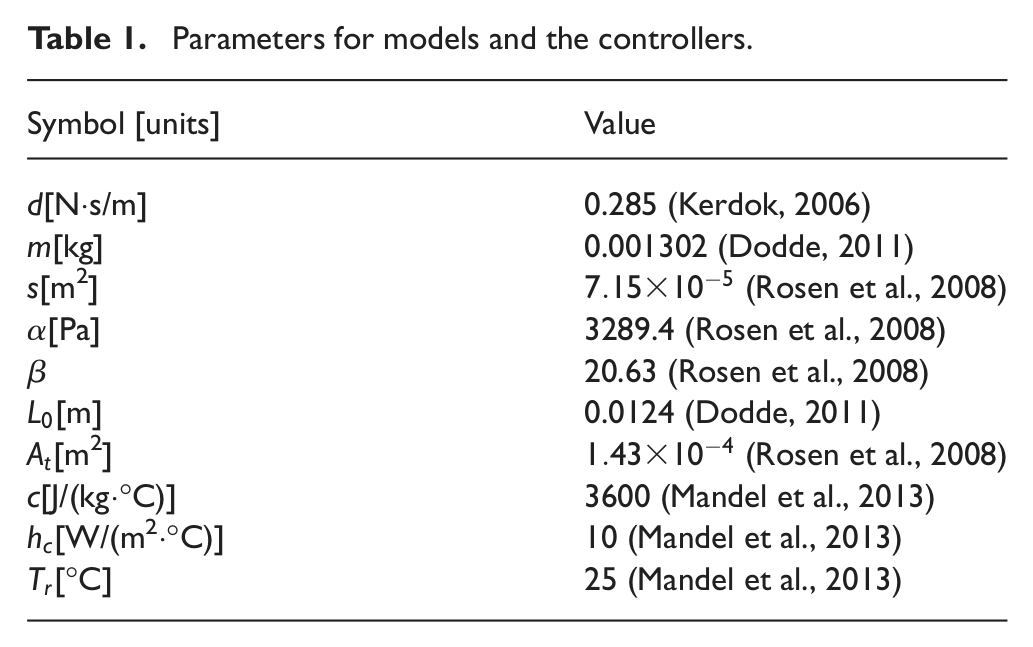
In order to verify the performance of the LQG controller implemented in this paper, giving the desired compression reference trajectory in Figure 7(b), the temperature reference trajectory (thermo coagulation is usually expected at temperature of above 60–70 °C (Mandel et al., 2013)) in Figure 9(b), system parameters of in vitro pig model that are taken from the studies listed in Table 1, the desired maximum absolute error less than 0.0001 m for the tissue compression process and less than 1°C for the heating process, the solutions of
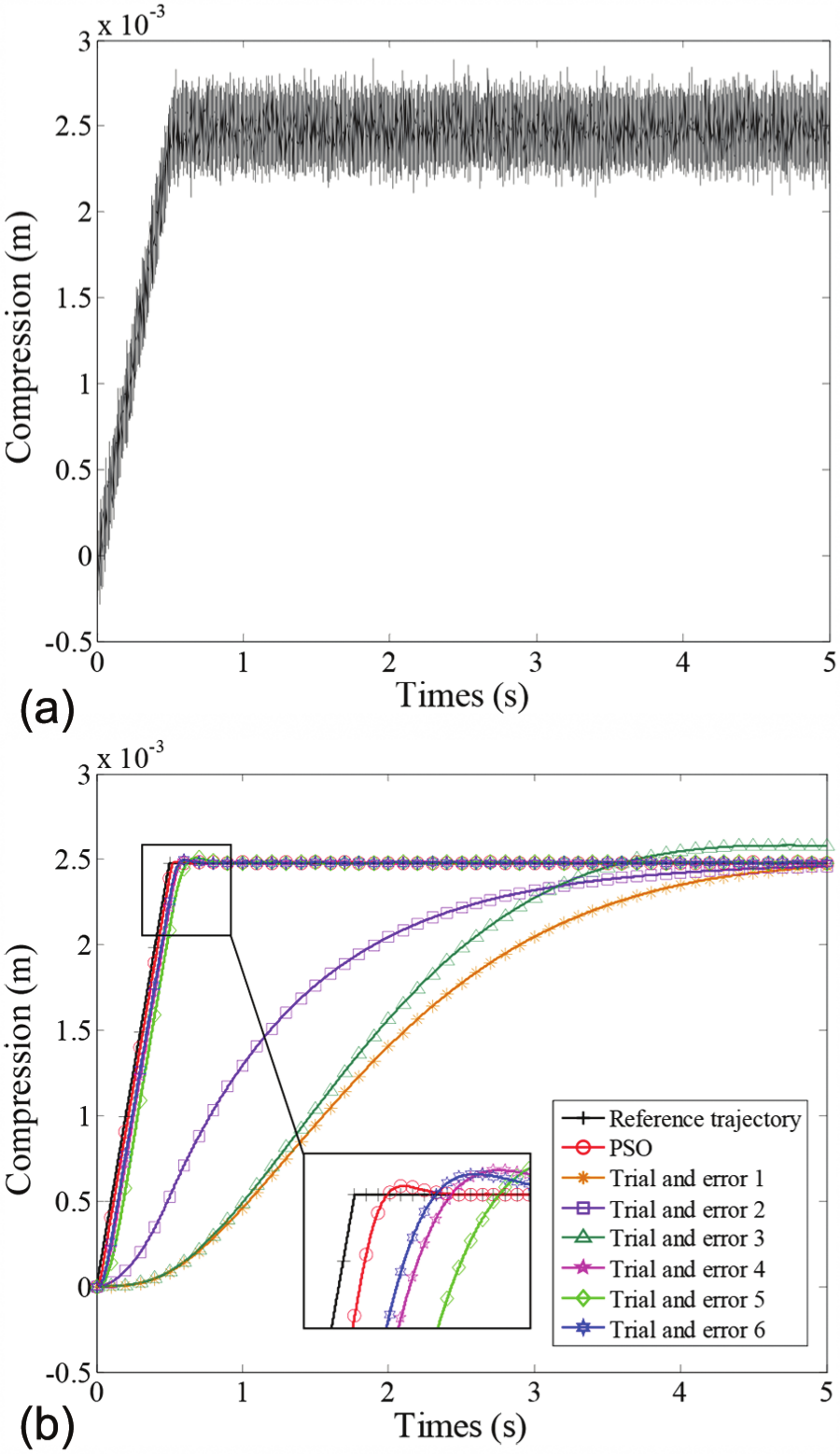
Compression trajectory tracking: (a) compression trajectory tracking unfiltered while using the linear-quadratic Gaussian (LQG) controller with optimal weighting matrix obtained by a particle swarm optimization (PSO) algorithm; (b) compression trajectory tracking after filtering.
Parameters for models and the controllers.
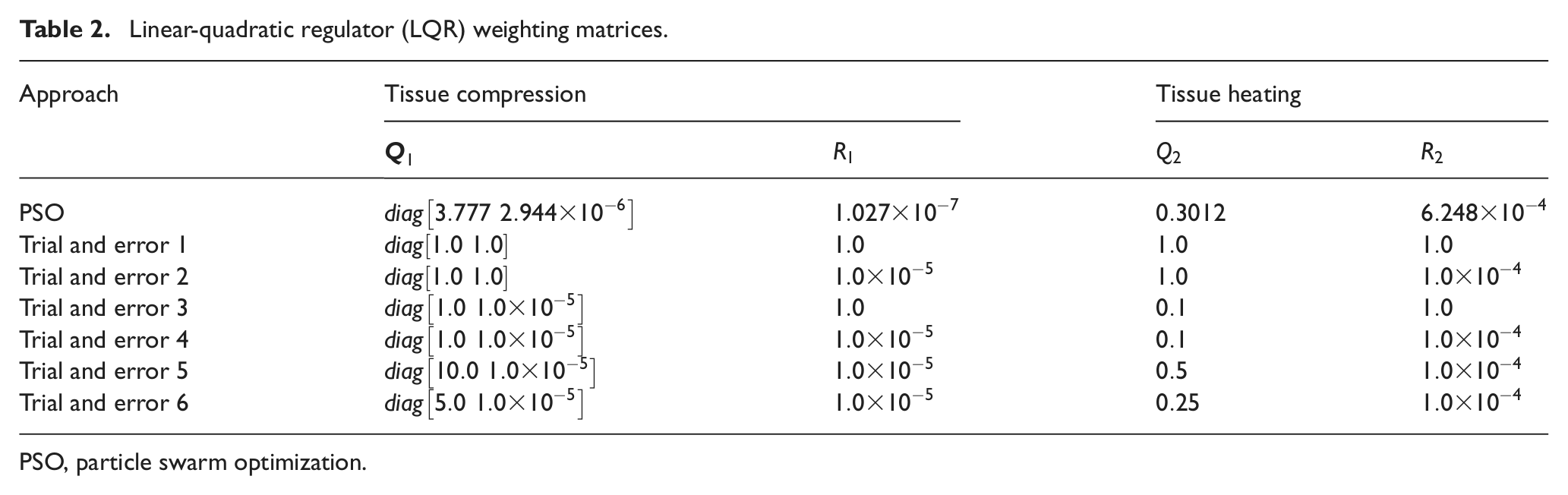
Using the PSO algorithm, the optimal weighting matrices for the tissue compression and heating are obtained, as shown in Table 2. In order to compare the performance of the approaches of selecting weighting matrices, the weighting matrices have also been chosen through a cumbersome process of trial and error.
Linear-quadratic regulator (LQR) weighting matrices.
PSO, particle swarm optimization.
The performance of the controller in tracking the compression reference trajectory is shown in Figure 7(b). The actual trajectory converges to the desired tissue compression reference trajectory with negligible deviation (the max absolute error was
Max absolute error between the desired and actual values.
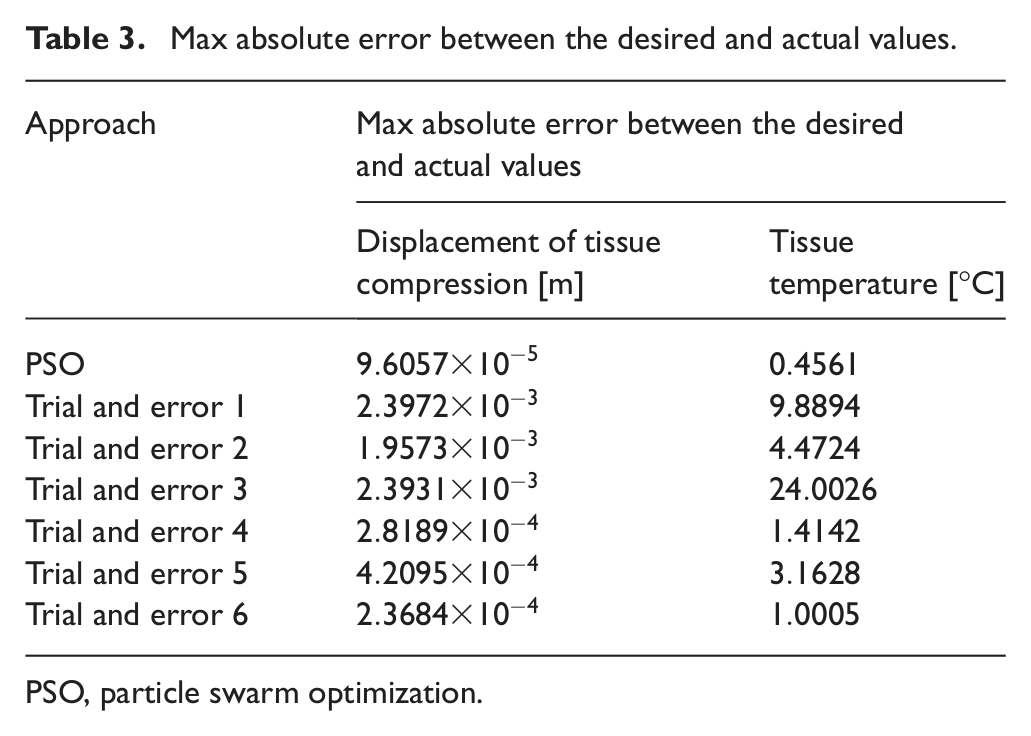
PSO, particle swarm optimization.
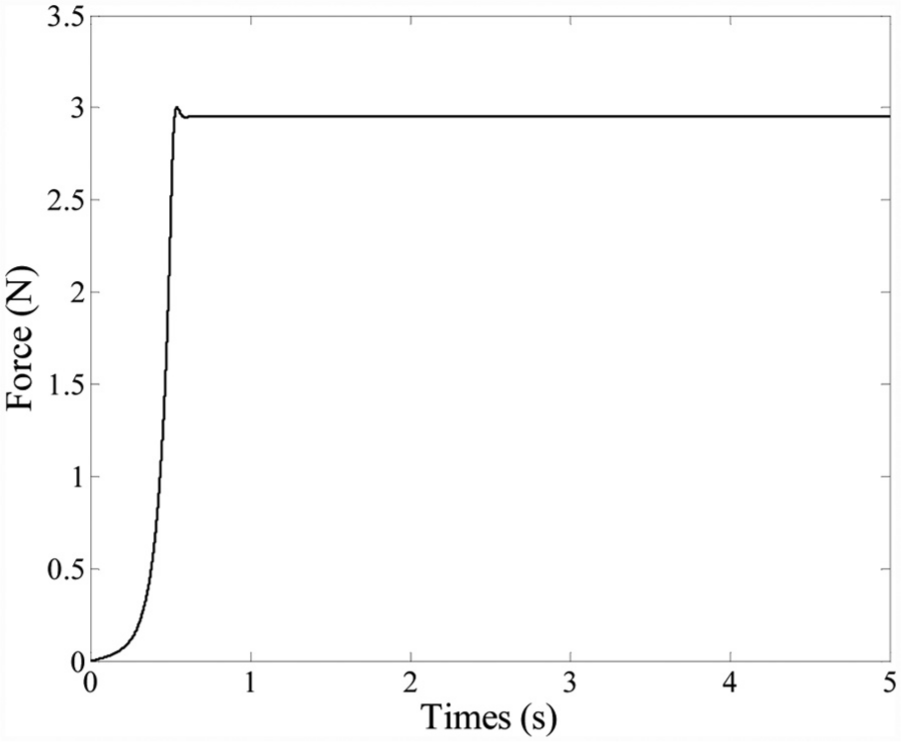
Force applied tissue while using the linear-quadratic Gaussian (LQG) controller with optimal weighting matrix obtained by a particle swarm optimization (PSO) algorithm.
Figure 9 shows the results of tracking the temperature trajectory. It can be seen that the controller was able to track the reference with almost no deviation (the max absolute error was 0.4561°C) and it also converges to the desired temperature in finite time. It can also be seen clearly from the Figure 9(b) and Table 3 that the
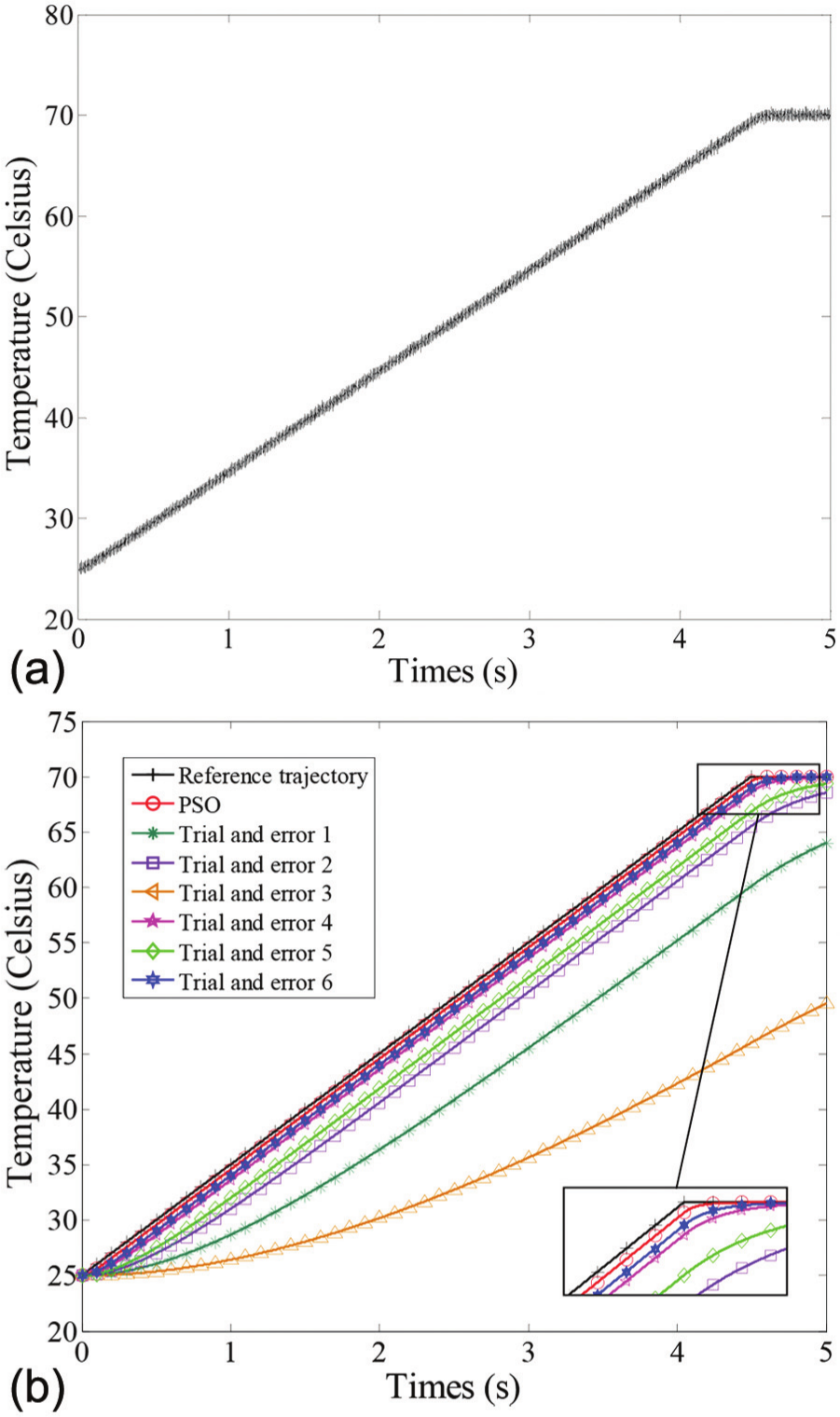
Temperature tracking: (a) temperature tracking unfiltered while using the linear-quadratic Gaussian (LQG) controller with optimal weighting matrix obtained by a particle swarm optimization (PSO) algorithm; (b) temperature tracking after filtering.
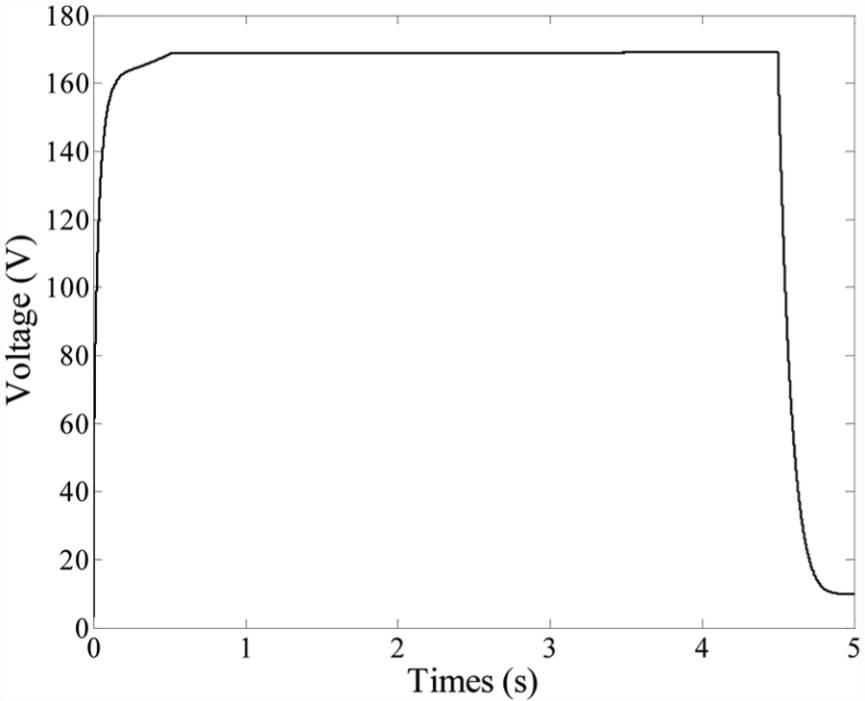
Voltage applied tissue while using the linear-quadratic Gaussian (LQG) controller with optimal weighting matrix obtained by a particle swarm optimization (PSO) algorithm.
Conclusion
In this paper, a non-linear MIMO model representing the variation of tissue compression and conductance under applied force was used to automate the electrosurgical procedure simultaneously. The MIMO model with the two inputs (force and voltage) and the two outputs (compression and temperature) were separately linearized using state feedback linearization techniques. Two separate LQG controllers were then used to track the ramp and hold reference trajectories. During the process of designing the controller, the PSO algorithm was used to choose the optimal weighting matrices for LQG regulator to ensure the maximum absolute error was less than the desired value. The approach to select the weighting matrices solved the time-consuming and cumbersome problem of the traditional trial and error method. Moreover, the PSO method can provide better controller performance for the MIMO system. MATLAB simulation results also showed that the controllers successfully tracked the trajectories with minimal deviation and in a finite time horizon, and the disturbances and noises also can be filtered effectively. Therefore, the controller for the MIMO system developed in this paper can be used to drive a surgical robot autonomously and perform electrosurgical procedures such as coaptic vessel closures.
The next stage of this work is to model the thermal property of the tissue more accurately, which would require in vivo experimentation on porcine tissue. Moreover, in order to test the robustness of the system, the simulation needs to take other possible faults into account. In this work, the dynamics of the operating robot was not considered, which will be part of our future work. Eventually the controller will be implemented in a robotic surgical system like the RAVEN II open-source surgical robot (Hannaford et al., 2013).
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the RPI Office of Research Seed Grant.