
Abstract
The input–output finite time stability (IO-FTS) for a class of fractional order linear time-invariant systems with a fractional commensurate order 0 < α < 1 is addressed in this paper. In order to give the stability property, we first provide a new property for Caputo fractional derivatives of the Lyapunov function, which plays an important role in the main results. Then, the concepts of the IO-FTS for fractional order normal systems and fractional order singular systems are introduced, and some sufficient conditions are established to guarantee the IO-FTS for fractional order normal systems and fractional order singular systems, respectively. Finally, the state feedback controllers are designed to maintain the IO-FTS of the resultant fractional order closed-loop systems. Two numerical examples are provided to illustrate the effectiveness of the proposed results.
Introduction
Fractional calculus is understood to be the generalization of ordinary calculus to the non-integer order case and has been investigated with growing interest (Kilbas et al., 2006; Podlubny, 1999). This is mainly due to the fact that many systems are known to display fractional order dynamics. The semi-infinite lossy Resistance Capacitance (RC) transmission line is the first physical system to be widely recognized as one demonstrating fractional behavior, where the current into the line is equal to the half-derivative of the applied voltage. Other systems involving fractional order dynamics are viscoelasticity, coloured noise, electrode-electrolyte polarization, dielectric polarization, boundary layer effects in ducts and electromagnetic waves (Das, 2011). The stability and the control problems of fractional order systems have been studied in many contributions (Efe, 2011; Li et al., 2010; Matignon, 1996; Tan et al., 2010; Yeroglu and Tan, 2011). For instance, the stability region for fractional order linear time-invariant systems was discussed by Matignon (1996) and Li et al. (2010) studied the stability of fractional order nonlinear dynamic systems using the second method of Lyapunov.
In practical applications, one always needs to consider the behaviour of the system over a finite time, where large values of state are unacceptable. For instance, in the boost converter (Niu and Zhao, 2013; Wang et al., 2009; Zhang et al., 2014), if the current changes too quickly, the circuit will break down. Besides, a large amount of overshoot cannot be applied in many practical engineering situations (Sun and Wang, 2012; Wang et al., 2014; Xiang et al., 2012). To study the transient performance, finite time stability (FTS) was proposed by Kamenkov (1953). FTS concerns only the specified bounds on the state. However, sometimes it is just the output, rather than the state, that is required to be restrained within a bound. In this case, the input–output finite time stability (IO-FTS) of a system is very significant. The concept of IO-FTS of integer order systems was originally introduced by Amato et al. (2010). We say that a system is input–output (IO) finite time stable if, for a given class of input signals, the output of the system does not exceed an assigned threshold during a specified time interval. From then on, many efforts have been devoted to the research of IO-FTS (Amato et al., 2010, 2012, 2014; Yao et al., 2012). In Amato et al. (2014), two sufficient conditions which guarantee IO-FTS of a given linear system for two different input classes was introduced. The IO finite time stabilization problem for time-varying linear singular systems was studied in Yao et al. (2012). Nevertheless, it is worth noticing that these studies were mainly concerned with integer order systems. In fact, it is interesting to study the IO-FTS for a class of fractional order systems. As far as we know, there are some results concerning the FTS of fractional order systems (Lazarević and Spasić, 2009; Wu et al., 2013). However, until now, there are no results concerning the IO-FTS of fractional order systems. The problem of the IO-FTS for fractional order systems is challenging. On the one hand, this is because of the complexity of the fractional order calculus equation and the fact that integer order algorithms (Chen, 2014;Wang et al., 2013; Xu and Lam, 2006) cannot be directly applied to the fractional order system. On the other hand, if we want to provide the condition of the IO-FTS for fractional order systems by employing the Lyapunov function, we have to find a Lyapunov candidate function in the fractional order. Some authors have proposed Lyapunov functions for fractional order systems (Burton, 2011; Lakshmikantham et al., 2008), but they are intricate and limited.
The objective of the present paper is to study the IO-FTS of fractional order linear time-invariant systems. Such systems are researched extensively in the literature (Chen et al., 2006; Hartley and Lorenzo, 2002) and can be seen as the natural generalization of state-space models of conventional integer order systems. The novel contribution of this paper goes in several directions. First, we provide a lemma which admits a simple Lyapunov function in the fractional order case and we introduce a property of the fractional calculus. Then, the concept of the IO-FTS for fractional order systems is given, and some sufficient conditions are provided to guarantee the IO-FTS of fractional order linear normal and singular systems. Finally, state feedback controllers are designed such that the resultant fractional closed-loop systems are IO finite time stable.
The remainder of this paper is organized as follows. Some necessary definitions and lemmas are recalled in the next section. Sufficient conditions, which guarantee the IO-FTS of the given fractional order linear normal and singular systems, are introduced in the third section. In the fourth section, two examples are given to present the effectiveness of the results.
Notation. Throughout this paper,
Fundamentals of fractional calculus
In order to utilize fractional calculus for the discussion in the current paper, the fundamental definition of the fractional calculus is recalled. The fractional integral with non-integer order

where
Based on the definition of the fractional order integral, the well known definition of the Caputo derivative of fractional order

where k is the first integer larger than
Without loss of generality, it is assumed that the lower limit of the fractional integrals and derivatives is zero throughout this paper. For the sake of brevity, we shall use the notation
Similar to the exponential function, the Mittag–Leffler function is the function frequently used in the solutions of fractional order systems, and defined as

To proceed the discussion of the main results, the following lemmas are given.

where

In particular, when

Main results
In this section, sufficient conditions which guarantee the IO-FTS of the fractional order system are derived for the input signal belonging to
IO-FTS of a fractional order linear normal system
Consider the following fractional order linear normal system

where
In the following, we introduce the concept of IO-FTS for the fractional order system.

it is clear that the output of the system (1) is well-defined for
The following theorem provides a sufficient condition on the IO-FTS of the fractional order linear normal system.


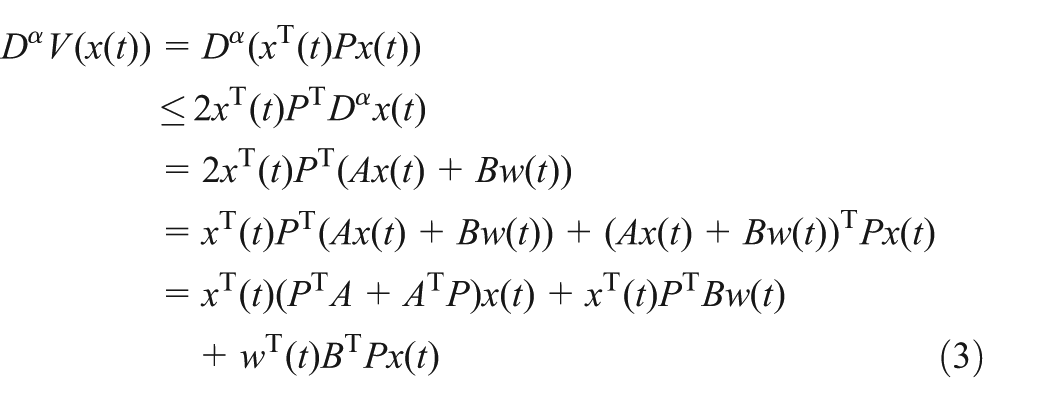
Then, by the Schur complement, (2a) holds if and only if
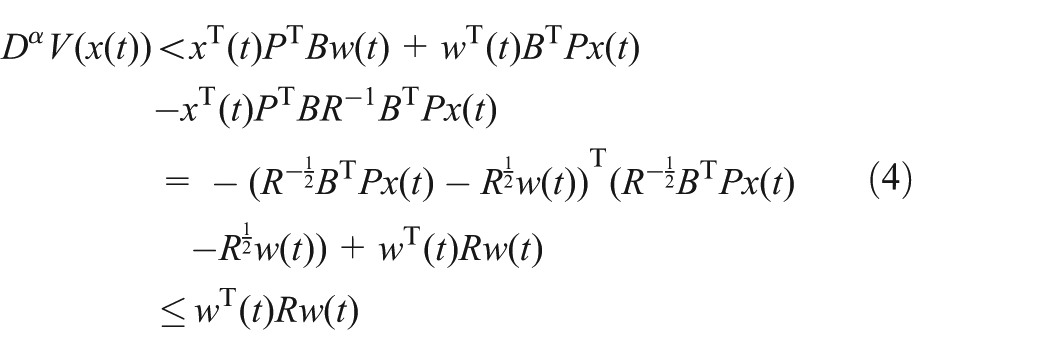
Integrating with order
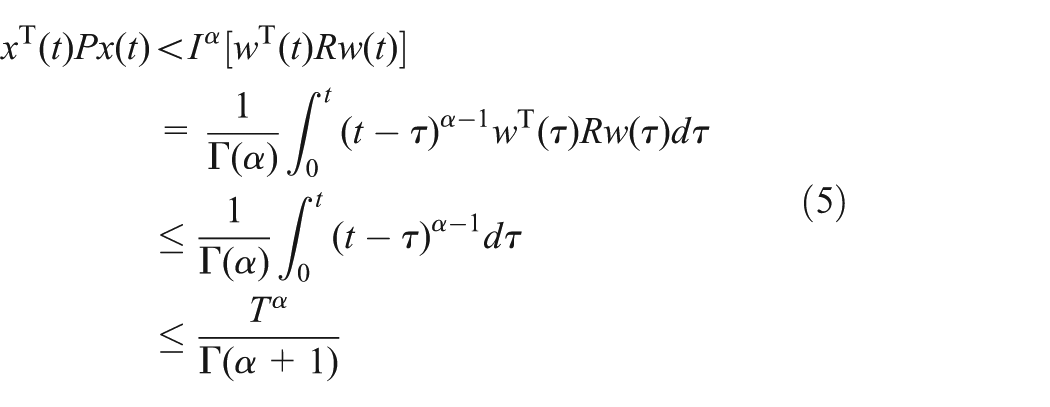
From (2b) and (5), it can be derived that

This ends the proof.□


From the result, we know it is consistent with the condition in the integer order linear time-varying system degenerated to time invariance in Amato et al. (2010). Comparing with the condition of IO-FTS for the integer order linear normal system, the inequality (2b) is the specific condition of the fractional order system (1) and the IO-FTS for integer order linear normal systems is just the special case of IO-FTS for fractional order linear normal systems.
By Theorem 1, it is easy to obtain the following corollary.


Based on the stability conditions presented in Corollary 1, the stabilizing controller design can be formulated as a convex optimization problem characterized by linear matrix inequalities. Here, we assume that all the state variables are available for state feedback. The purpose is to design a state feedback controller

where

with


then the system (9) is IO finite time stable with respect to

By Corollary 1, we know that the closed-loop system (9) is IO finite time stable with respect to
IO-FTS of a fractional order linear singular system
Consider the following fractional order linear singular system

where
By the assumption of rank(E) = r for the system

The definition of the IO-FTS of the fractional order singular system is the same statement as the fractional order normal system.


Now, define

where the partition is compatible with that of A in (12). Then, by (13b),

Pre- and post-multiplying (15) by

where

Then, the 2–2 block in (16) gives
Furthermore, by the Schur complement, it is easy to check that inequality (13a) holds if and only if the following inequality holds

By inequality (13b), it follows that
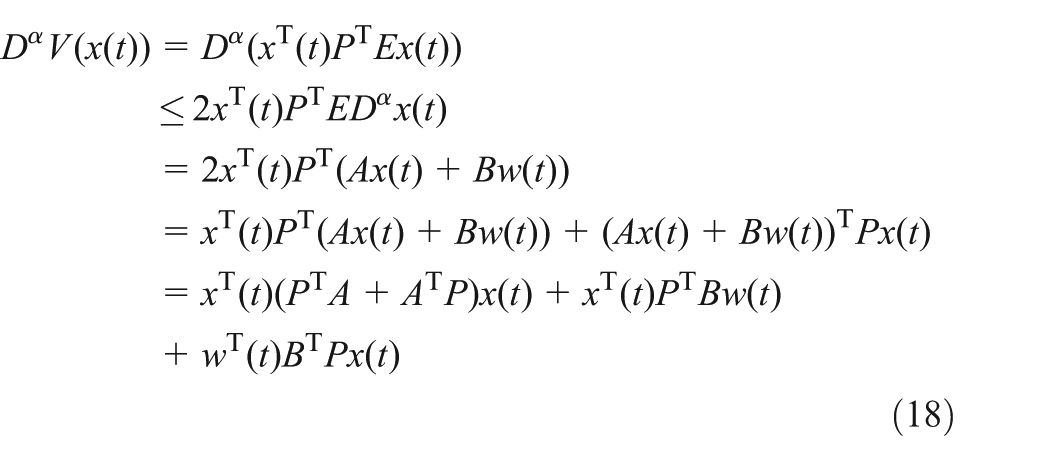
It can be obtained from (17) that
Integrating with order
Combining condition (13b) with the inequality (20) gives

The proof is completed.□


Therefore, IO-FTS of fractional order linear singular systems is the generalization of integer order linear singular systems.
The following corollary, which is analogous to Corollary 1, can be stated for a fractional order linear singular system.


Next, we define the stabilization problems we want to solve. Given the positive scalar T, the positive defined matrices R and Q, the fractional order singular system described by the state-space equation

finds a sufficient condition which guarantees the interconnection of (23) with the controller

where


Then, a stabilizing state feedback controller can be given as


It is easy to obtain that (25a) can be rewritten as

It follows from Corollary 2 that the closed-loop system (24) is IO finite time stable with respect to
Numerical example
In this section, two examples are presented to illustrate the effectiveness of the proposed method.
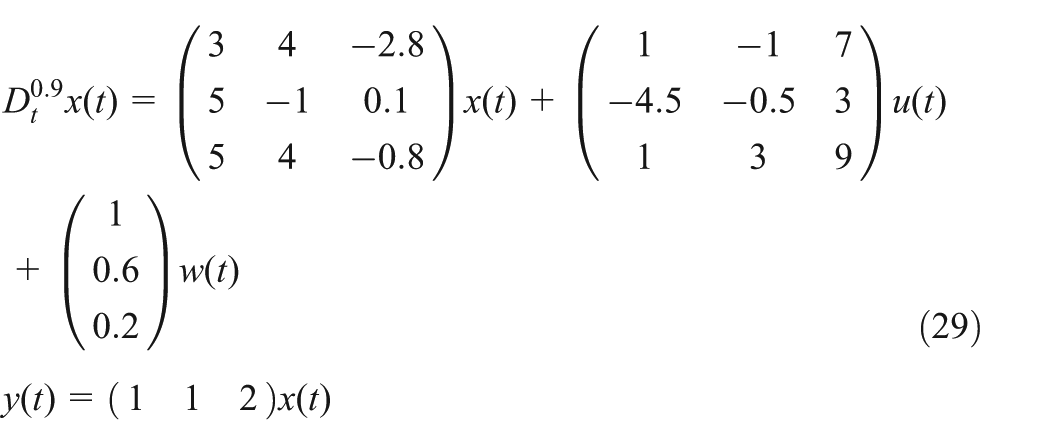
with
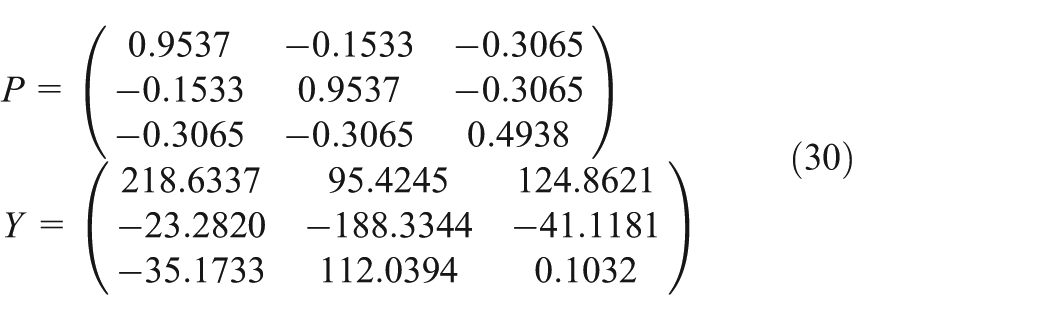
and the desired state feedback controller with

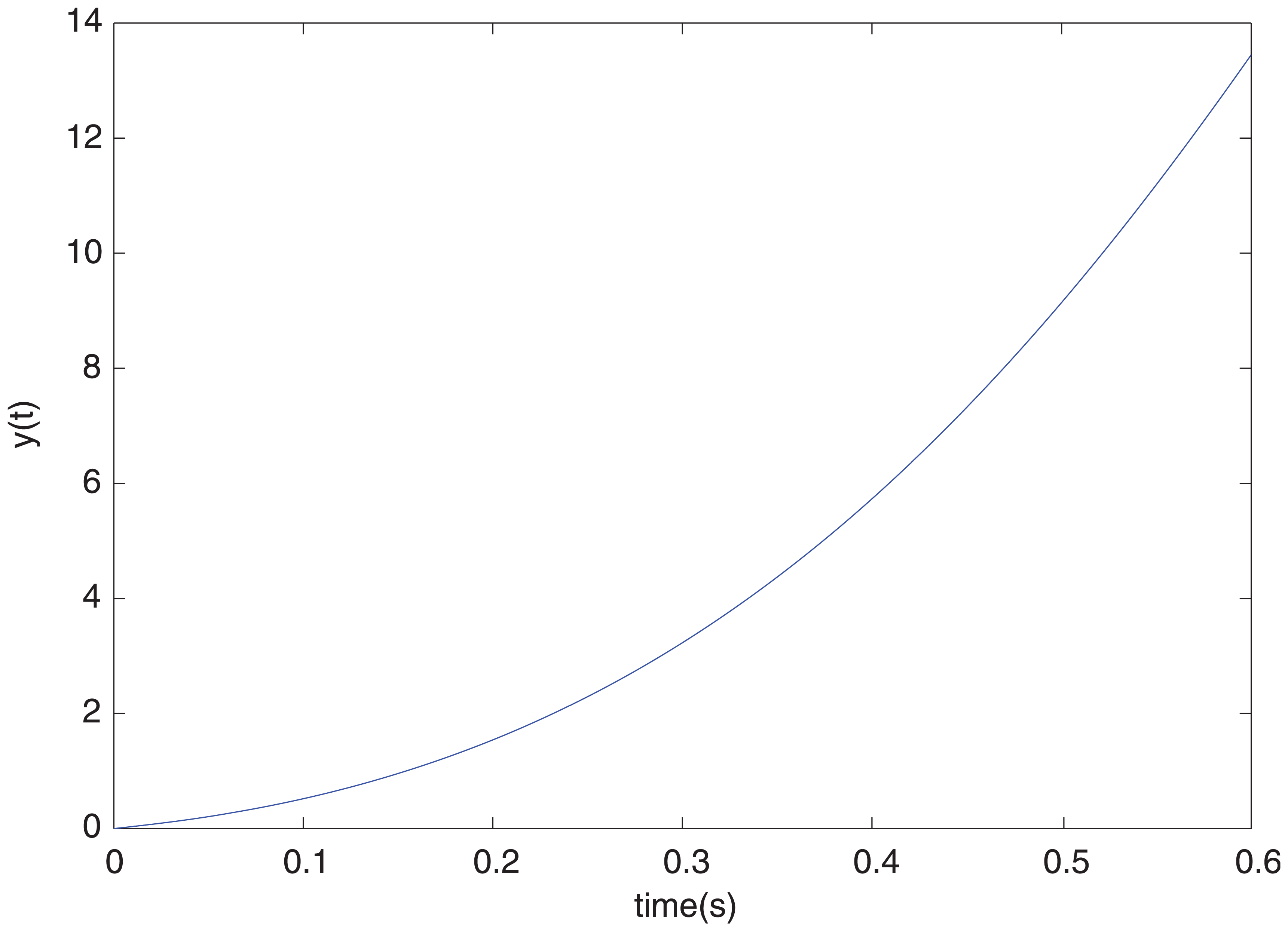
Output of the open-loop system (29) versus time.
By applying the controller to system (29), it is easy to see the IO-FTS of the fractional closed-loop system from the output of the closed-loop system (Figure 2).
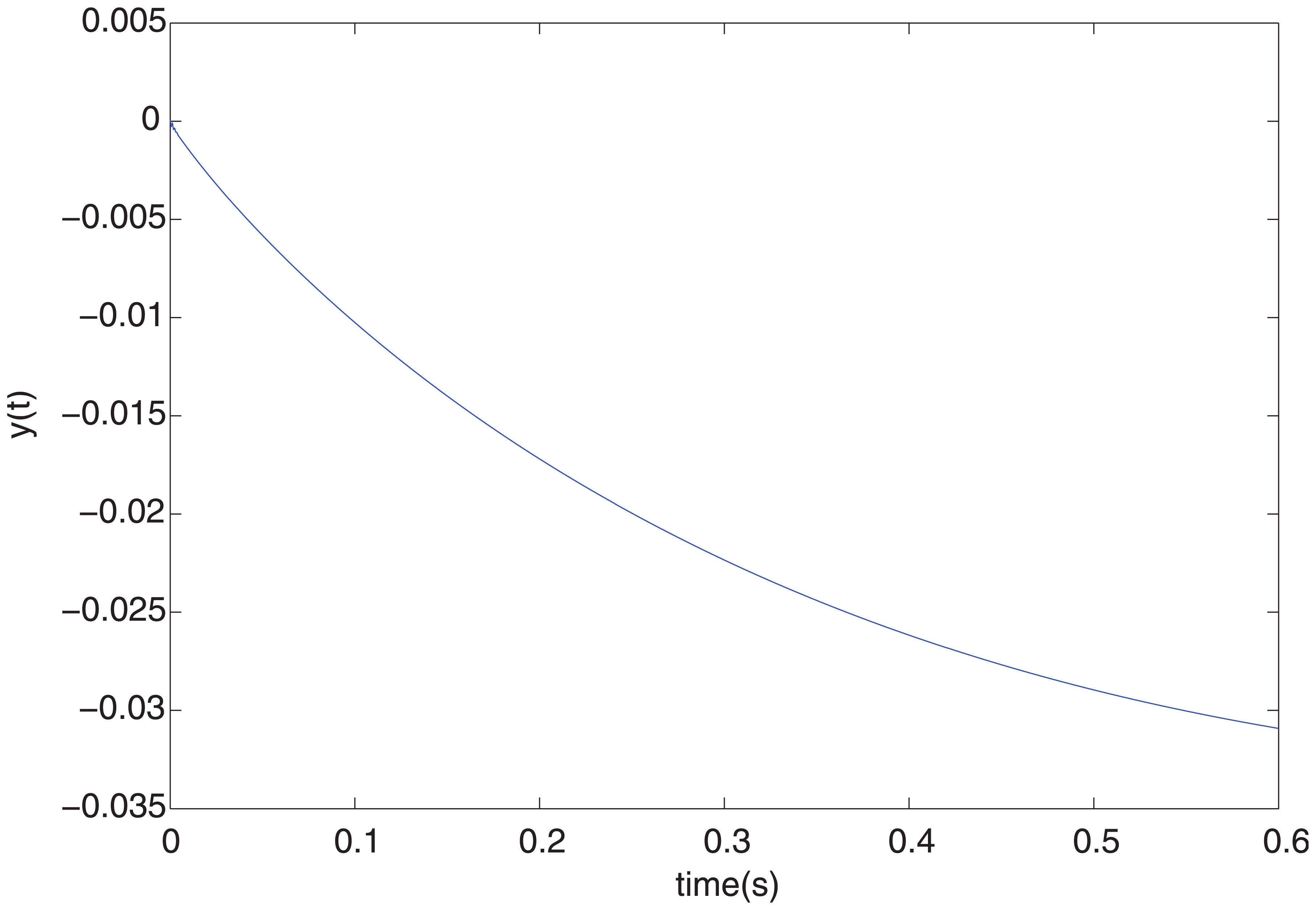
Output of the closed-loop system (29) versus time.

Let
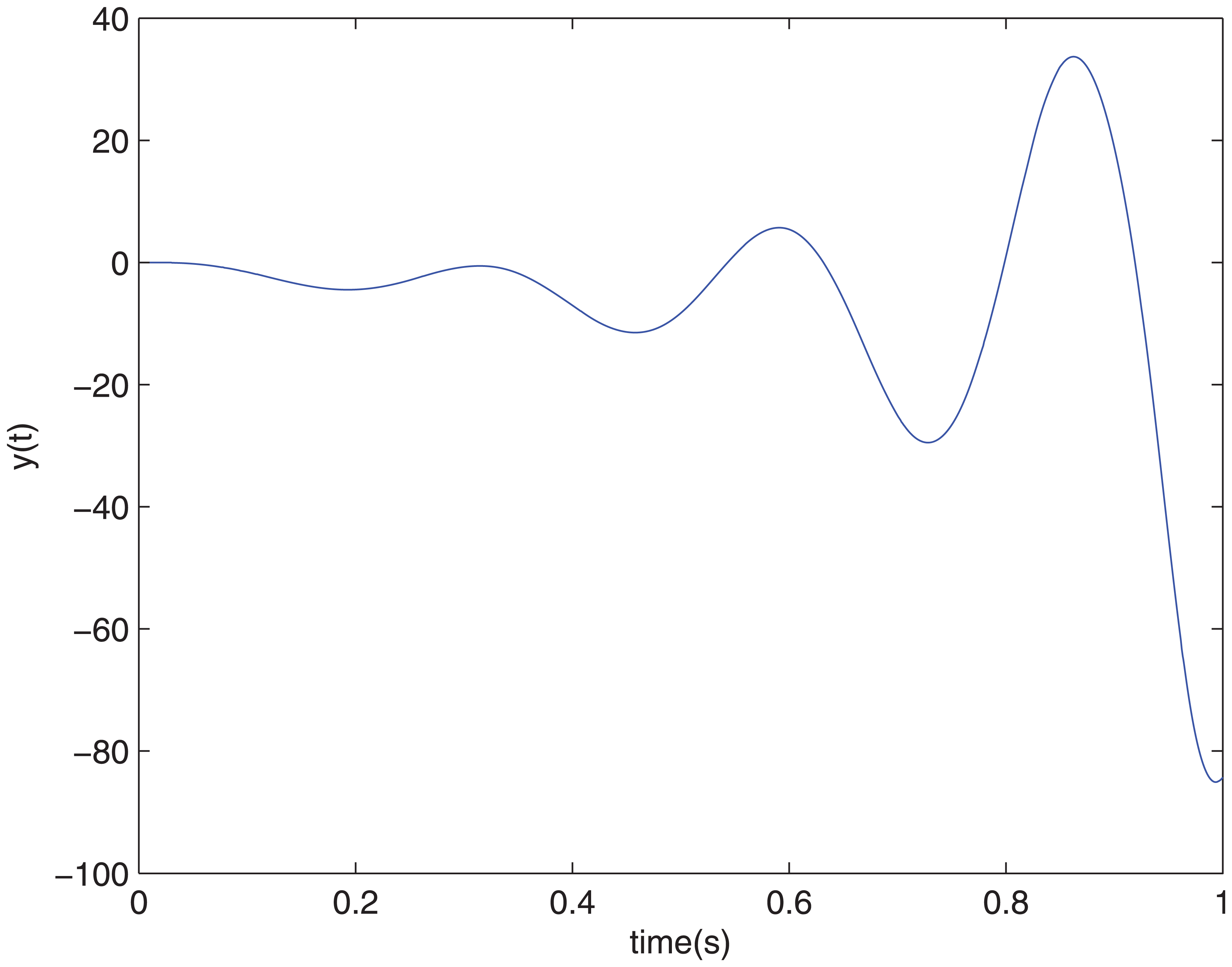
Output of the open-loop system (32) versus time.
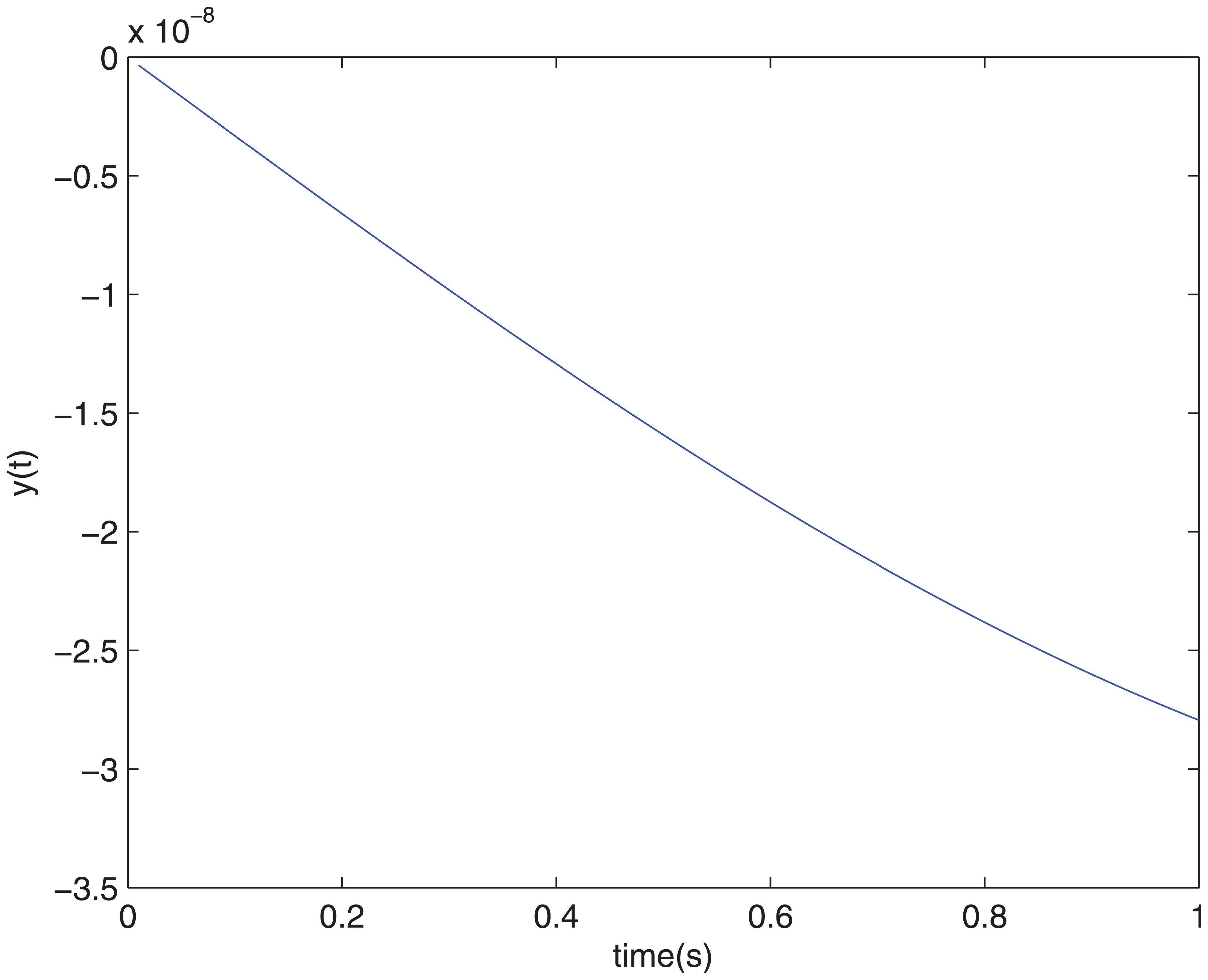
Output of the closed-loop system (32) versus time.
Conclusion
In this paper, we have considered the IO-FTS for the fractional order linear time-invariant normal systems and singular systems. Some sufficient conditions which guarantee the IO-FTS for a class of fractional order systems have been derived by applying the Lyapunov function. The main results are formulated in terms of linear matrix inequalities. For the sake of presentation simplicity, we have considered the case where the systems are time invariant and certain. The results can be extended to the uncertain framework.
Footnotes
Conflict of interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 11371233 and 61403241).