
Abstract
This paper presents an adaptive nonsingular terminal sliding mode controller for a bearingless permanent magnet synchronous motor. In order to rapidly converge state variables associated with terminal sliding mode control, an adaptive variable-rated exponential reaching law, in which the L1 norm of state variables is introduced, is proposed for the second-order uncertain nonlinear dynamical system. Exponential and constant reaching speed can adaptively adjust according to the distance between state variable and equilibrium point, which can shorten the reaching time and weaken system chattering. The mathematical models for rotating speed and the rotor radial displacement of the bearingless permanent magnet synchronous motor system are set up. The proposed method is then applied to the speed and radial displacement control. Simulation results are provided to validate the effectiveness of the proposed method.
Keywords
Introduction
The bearingless permanent magnet synchronous motor (BPMSM) is being actively researched and developed around the world due to its advantages of simple structure, reliable operation, high efficiency, high torque density, power density, etc. They have demonstrated the potential applications in high-speed precision mechanical processing, aeronautics and astronautics, centrifugal machines, turbomolecular pumps, flywheel energy storage, etc. (Asama et al., 2011; Schneider et al., 2008; Sun et al., 2013). However, the BPMSM control system is a nonlinear, time-varying and complex system with unavoidable and unmeasured disturbances, as well as parameter variations (Chiba et al., 1994). It is very difficult to achieve a satisfactory performance in the entire operating range by only using linear control algorithms (Ooshima et al., 1996, 2004; Zhu et al., 2009).
In recent years, with the development of modern control theory and motion control, in order to obtain high performance of the BPMSM control system with the characteristics of rapid response, small overshoot, high tracking precision and strong anti-disturbance ability, various methods of nonlinear control theory have been proposed, such as independent control (Qiu et al., 2006), direct radial displacement control (Zhang and Luo, 2009), nonlinear feedback control (Grabner et al., 2008), sliding mode control (Sun et al., 2013), fuzzy self-adaptive proportional–integral–derivative (PID) control (Meng et al., 2014), artificial neural network inverse intelligent control (Sun et al., 2009), etc. These control methods have improved the performance of the BPMSM system from different aspects.
Among these methods, the sliding mode control methods are regarded to be efficient methods to improve the disturbance rejection and robustness properties of BPMSM systems (Sun et al., 2013). However, the sliding mode control method has a problem that system states converge to the equilibrium point at an infinite time. Accordingly, a nonlinear sliding mode called terminal sliding mode control (TSMC) has been proposed (Zak, 1988). By introducing the nonlinear term in the sliding mode, TSMC can converge to the specified trajectory in finite time. After that, in order to avoid the singularity problem associated with conventional TSMC, nonsingular terminal sliding mode control (NTSMC) was developed (Feng et al., 2002; Yang et al., 2013). TSMC, NTSMC and their improved algorithms have been widely used in high-speed and high-precision motor control systems due to their limited time convergence, fast dynamic response and high tracking accuracy (Chen et al., 2011; Feng et al., 2009; Jin et al., 2009; Li et al., 2013; Tong et al., 2008; Zhang et al., 2011). In order to further improve the convergence rate of the state variables in NTSMC, Chen et al. (2011) introduced a decay time variant into the sliding mode and designed an integral time variable dynamics sliding mode, which increased the complexity of the sliding mode surface design. Tong et al. (2008) presented a variable-rated exponential reaching law, but did not consider the reaching law selected when the state variables become zero. Based on the variable-rated exponential reaching law, Zhang et al. (2011) introduced a power function of the terminal attractor and the system state variable. This method has improved the convergence rate of the state variable, and suppressed the chattering of sliding mode control. However, the complexity of the system design and calculation was increased due to the introduction of a power function.
In this paper, an adaptive variable-rated exponential reaching law is presented, where the L1 norm of state variables is introduced. Exponential and constant approach speed can adaptively adjust according to the state variables’ distance to the equilibrium point, which can shorten the reaching time and weaken system chattering. The reaching law is applied to design a nonsingular terminal sliding mode controller, which is simulated and verified based on a second-order uncertain nonlinear system. By constructing the vector control platform of the BPMSM, the BPMSM speed and radial displacement adaptive NTSM controller are designed, and the effectiveness of the proposed method is verified.
Adaptive nonsingular terminal sliding mode control
Consider a second-order uncertain nonlinear dynamical system (Feng et al., 2002)

where

The reaching law constant has two parts:

where
The first-order norm of state variables introduced in the adaptive variable speed exponential reaching law (3) can adaptively adjust its exponential reaching speed and constant reaching speed. For equation (3), the instant answer of exponential reaching is
This reaching law is used to design a nonsingular terminal sliding model controller as adaptive NTSMC. The theorem is as follows.

If the control is designed as
where

Then


Two different cases will be discussed as follows.
(1) When

Therefore, for the case
(2) When



For
It is concluded that the sliding mode can be reached from anywhere in the phase plane in finite time. It is obtained that the system will converge to zero in finite time after reaching the sliding mode from Yang et al. (2013). This completes the proof.
Mathematical model of the bearingless permanent magnet synchronous motor
There have two sets of windings nested in BPMSM stator. One is a torque winding, the other is a suspension winding. The pole pairs of these two windings is different about 1. A surface-mounted BPMSM usually uses rotor field oriented control to decouple the torque and suspension force; the vector control strategy of

where
The radial suspension force of the BPMSM is obtained by the virtual displacement method of the electromagnetic field (Chiba et al., 1994). The radial suspension forces

where
Consider the influence of the BPMSM rotor eccentricity and radial force perturbation; the rotor radial displacement mathematical model is established as follows by the dynamic equations of the BPMSM

where m is the rotor mass,

where
Adaptive nonsingular terminal sliding mode control design for the bearingless permanent magnet synchronous motor
Design of speed adaptive NTSMC
A speed controller is used to accurately track the given speed

It is obtained from (11) and (15) that

Considering the motor parameter uncertainty,
where

where
The state equation of speed error system can be obtained from (15), (17) and (18)


If
then the speed error will converge in finite time. Here
Design of rotor radial displacement adaptive NTSMC
The radial displacement controller is used to accurately track the given rotor radial displacements

It is obtained from (13) and (22) that

Considering the motor parameter uncertainty,
where

The state equation of radial displacement error control system based on the x direction can be obtained from (22), (24) and (25):


Radial force
Then radial displacement error on the x direction will converge in finite time. Here
Simulation studies
Performance analysis of adaptive NTSMC and NTSMC
Take the below second-order nonlinear system as an example to design the adaptive nonsingular terminal sliding mode controller and verify the effectiveness of the proposed method

With nonsingular terminal sliding mode (4) and reaching law (3), the control law is designed as follows
Therefore, system (29) will converge in finite time.
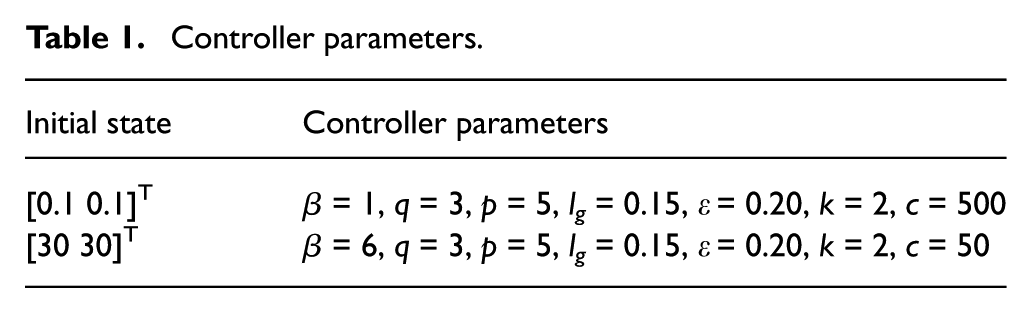
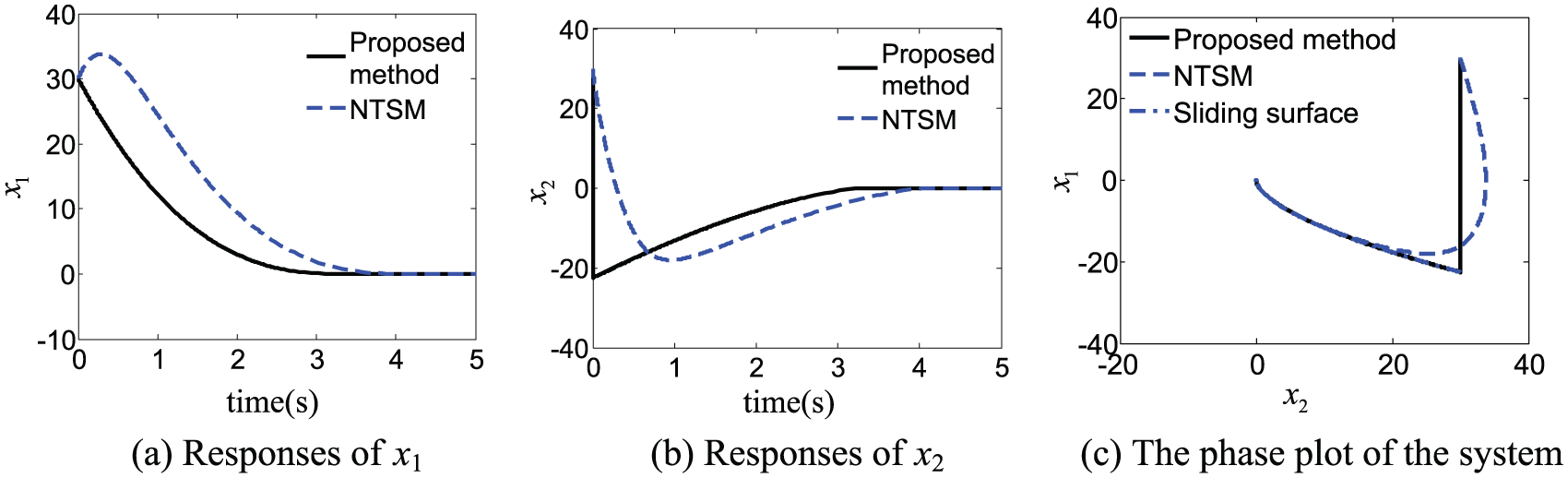
Two cases are chosen to analyse and compare the proposed method with NTSMC with reaching law (2). One is that the initial state variable is close to the equilibrium point, namely
Controller parameters.
The simulation results are shown in Figures 1 and 2, which indicate that the proposed method can make state variables converge in finite time and the convergence rate is faster than the NTSM controller with exponential reaching law. In Figure 2(b), the initial state of x2 is far from the equilibrium point and x2 converges rapidly from 30 to −20 in a very short period of time under the proposed reaching law control. Because t = 5 s in Figure 2(b), the initial state of x2 is coincident with the coordinate axes, so it looks as if it is starting to converge from −20. However, in fact the initial state of x2 converges from 30. The phase plane response of the control system is also provided, as shown in Figures 1(c) and 2(c).
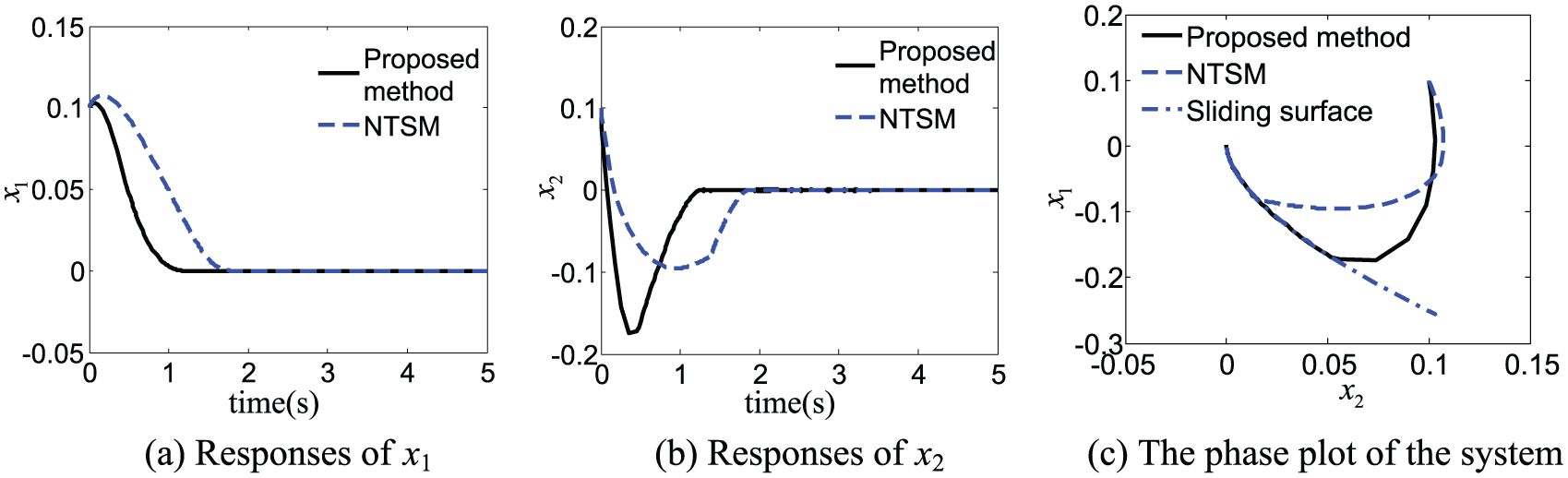
Performance comparison of the proposed method and nonsingular terminal sliding mode control
Performance comparison of the proposed method and nonsingular terminal sliding mode control
Simulation of adaptive NTSMC for the BPMSM
Figure 3 shows the structure diagram of the BPMSM based on vector control. In this diagram,
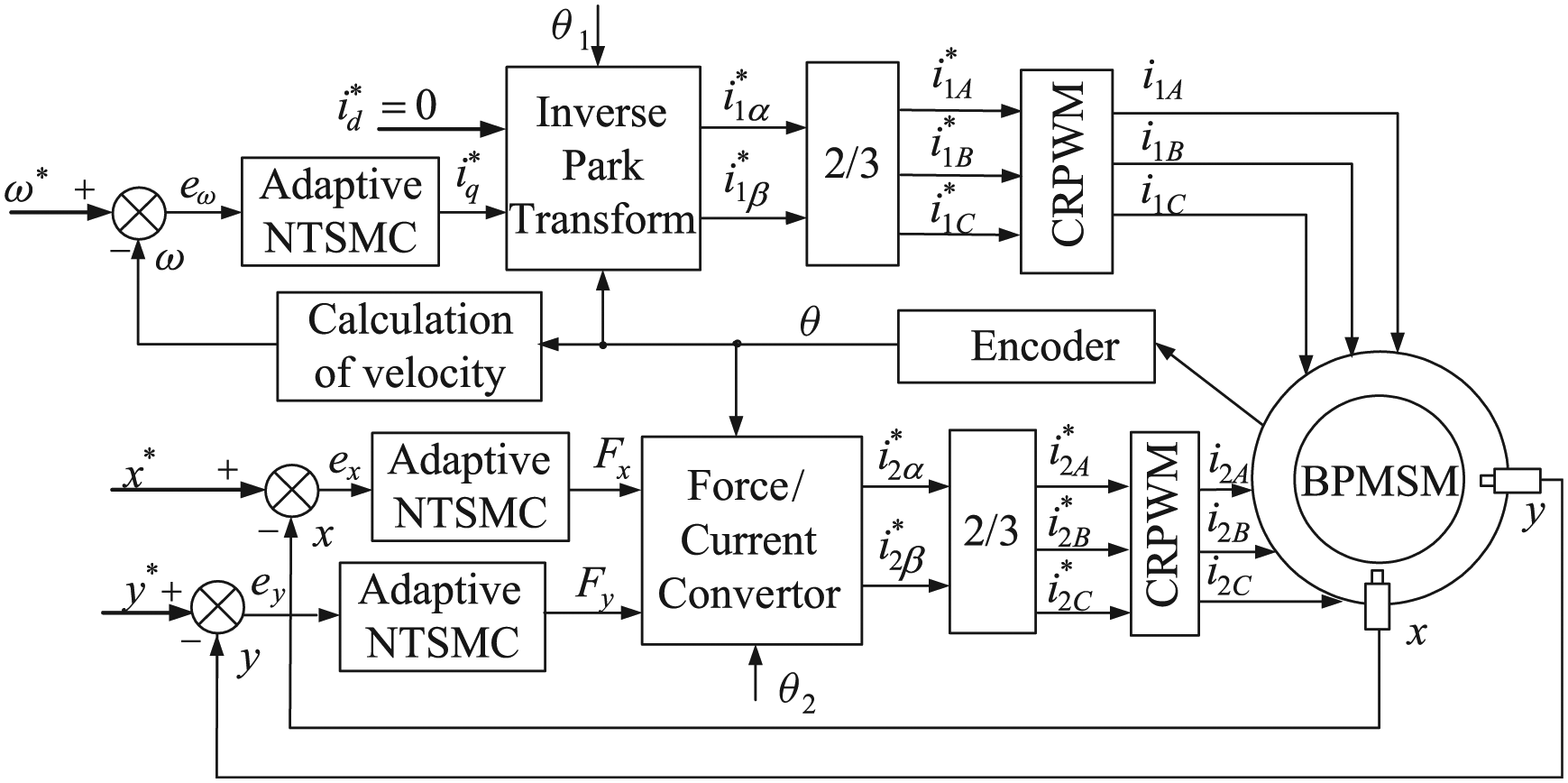
Schematic diagram of the bearingless permanent magnet synchronous motor (BPMSM) system based on vector control.
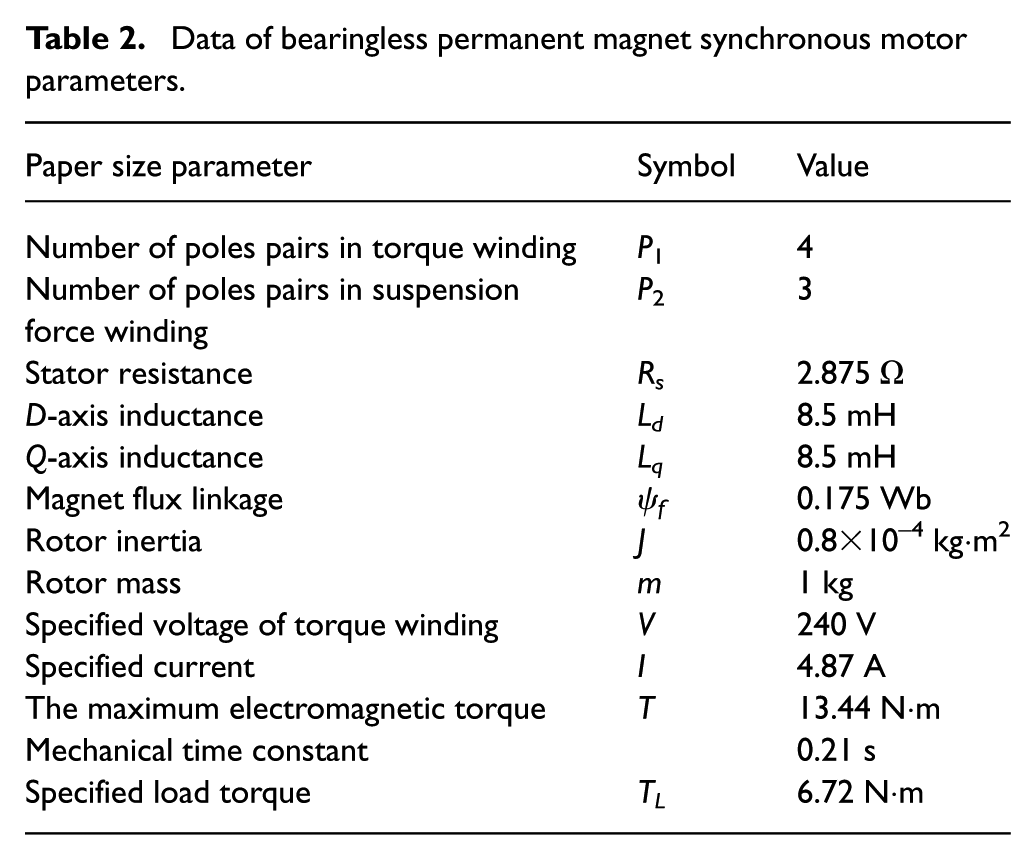
Data of bearingless permanent magnet synchronous motor parameters.
The simulation results of the BPMSM speed regulation system with different controllers is shown in Figure 4, where the ordinary exponential reaching law is used by the NTSMC. The parameters of adaptive NTSMC are as follows:
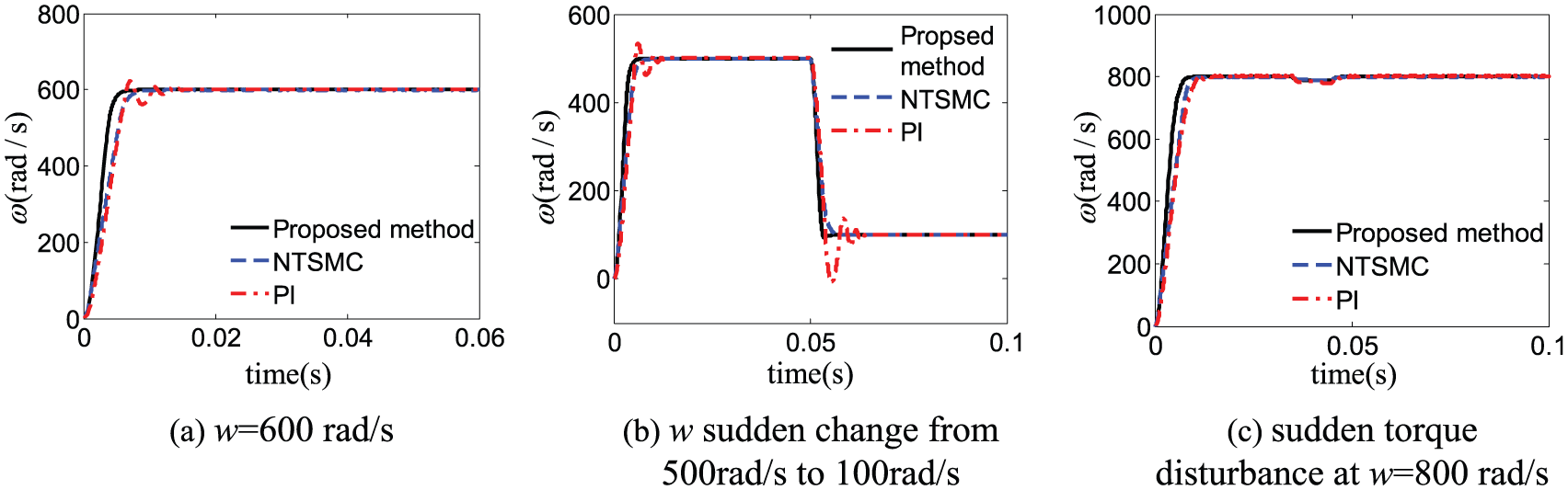
Comparison of responses under the proportional–integral (PI), nonsingular terminal sliding mode (NTSM) and proposed method.
A comparison of performance indexes of the three methods is shown in Table 3. Please note that the tolerance band of settling time and recovery time in this paper is always selected as 2%. It can be observed that the proposed method is still effective under different operating conditions. radial displacement control curve on the
Comparison of performance indices on the three methods.
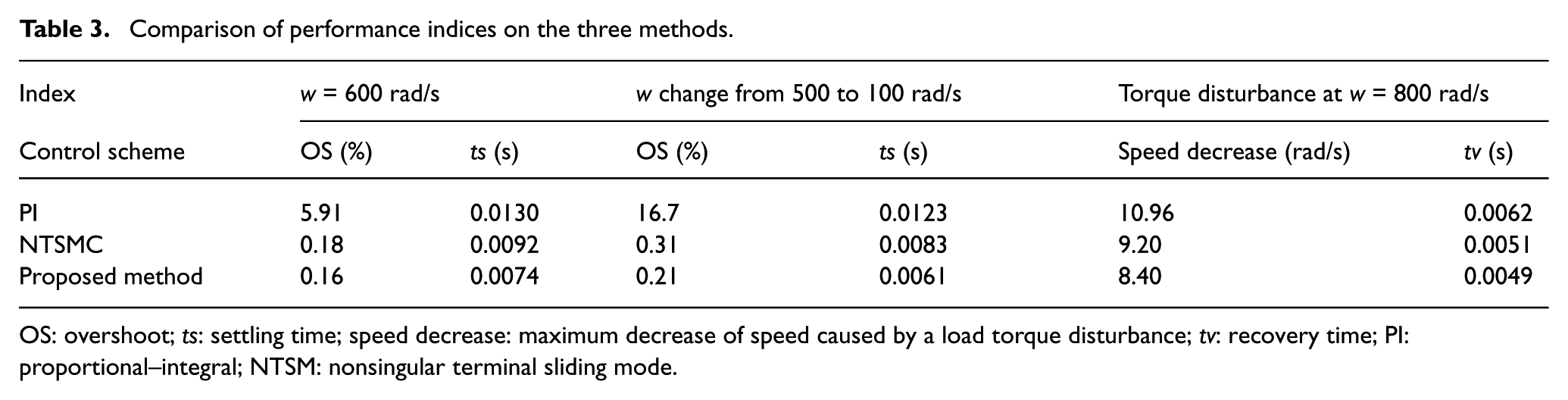
OS: overshoot; ts: settling time; speed decrease: maximum decrease of speed caused by a load torque disturbance; tv: recovery time; PI: proportional–integral; NTSM: nonsingular terminal sliding mode.
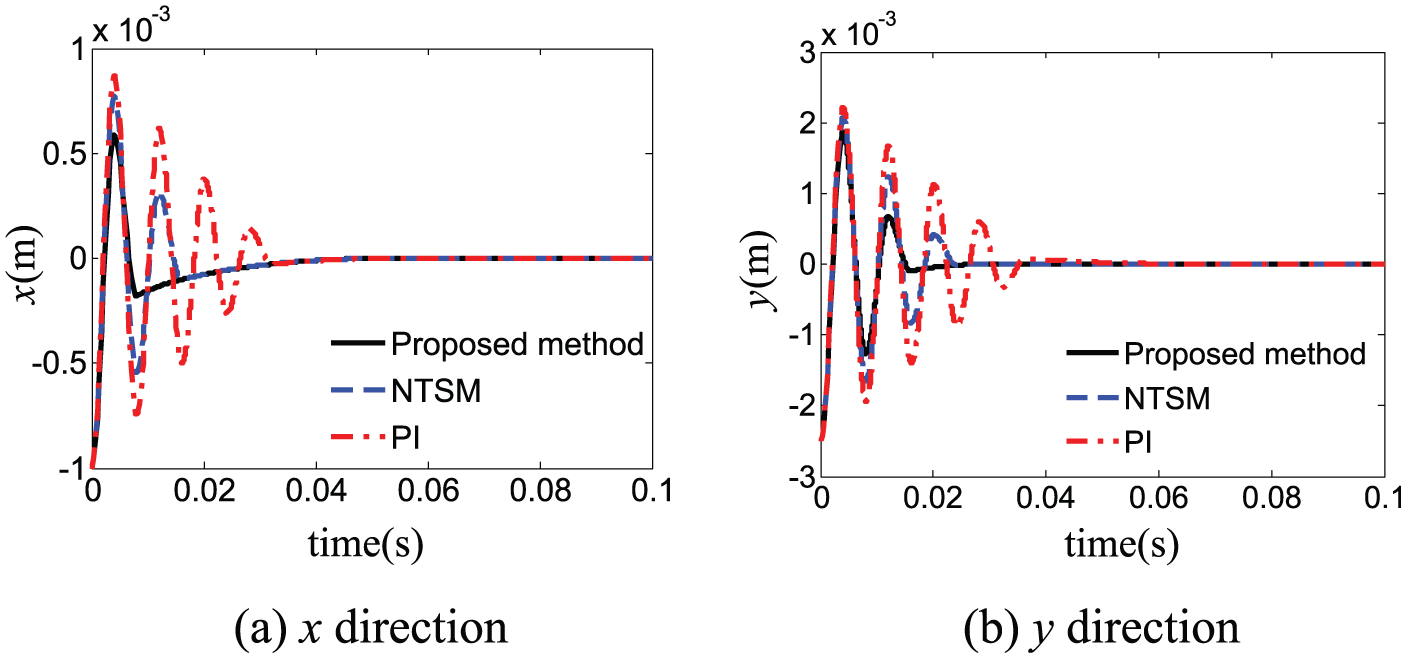
Radial displacement control curve under the proportional–integral (PI), nonsingular terminal sliding mode (NTSMC) and proposed method.
Conclusion
In this paper, an adaptive nonsingular TSMC method has been proposed for the BPMSM. An adaptive variable-rated exponential reaching law is presented to obtain faster convergence of state variables during the whole process in TSMC, where the L1 norm of state variables is introduced. Simulation results show that the proposed method can rapidly track the given values, overshoot and static error are small, and higher robustness can be obtained. It is effective to design a nonsingular terminal sliding mode controller by using the adaptive variable-rated exponential reaching law. In the future, how to apply the proposed method on an actual system based on Digital Signal Processor (DSP) will be the next work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant number 61573170), Natural Science Foundation of Jiangsu Province (grant number BK20150530), Jiangsu Province Colleges and Universities Natural Science Research Project (grant number 12KJB470002), a project funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD) and the Professional Research Foundation for Advanced Talents of Jiangsu University (grant number 14JDG077).