
Abstract
This paper introduces an adaptive control method for finite-time modified function projective lag synchronization of uncertain hyperchaotic systems. Based upon novel nonsingular terminal sliding mode surfaces and the adaptive super-twisting algorithm, a controller is proposed to provide robustness, high precision and fast and finite-time modified function projective lag synchronization without the knowledge of the upper bound of uncertainties and unknown external disturbances. In addition, chattering is significantly attenuated due to the inherited continuity of the proposed controller. The global stability and finite-time convergence are rigorously proven. Numerical simulation is presented to demonstrate the effectiveness and feasibility of the proposed strategy and to verify the theoretical results.
Keywords
Introduction
Since the pioneering work of Pecora and Carroll (1990), chaos synchronization has attracted many researchers’ attention due to its potential applications in many areas, such as biological systems, chemical reactions, power converters, information processing, secure communications and so on (Chen and Dong, 1998; Feki, 2003; Luo, 2009). Many types of chaos synchronization phenomena have been investigated, such as complete synchronization (Njah, 2009; Vincent, 2008), anti-synchronization (Ahn, 2009), generalized projective synchronization (Yan and Li, 2005), Q-S (lag or anticipated) synchronization which means that there exist smooth, bounded vector functions
In many practical situations, chaotic (hyperchaotic) systems include parameter and model uncertainties, unmodeled dynamics, structural variations and external disturbances. Moreover, it is difficult to determine the upper bounds of uncertainties and external disturbances in advance. Some adaptive control methods have been reported to solve the chaos synchronization problem of chaotic (hyperchaotic) systems in the presence of parameter uncertainties, unknown parameters and/or unknown external disturbances (Fu, 2012; Gao et al., 2013; Sudheer and Sabir, 2009; Sun et al., 2013; Wu and Lu, 2011; Zheng et al., 2010). Nevertheless, such schemes guarantee only asymptotic stability; that is, they guarantee only that the synchronization errors will converge to zero with infinite settling time.
In order to achieve finite-time synchronization, finite-time control methods have been shown to be useful and efficient techniques. The finite-time control method has demonstrated some advanced properties, such as fast and finite-time convergence, robustness, disturbance rejection ability and high tracking precision (Bhat and Bernstein, 2000). Therefore, finite-time control techniques such as (nonsingular) terminal sliding mode control or Lyapunov-based control have attracted a great deal of attention in the research community over the last few years. To date, several formulated works that are the combination of adaptive control techniques and the finite-time control techniques have tried to achieve adaptive finite-time synchronization between two chaotic (hyperchaotic) with uncertainties and/or unknown external disturbances (Aghababa and Aghababa, 2012a, 2012b; Fang et al., 2013; Li et al., 2013; Sun et al., 2014; Sun et al., 2016a, 2016b; Wang et al., 2014, 2015; Wu et al., 2016; Yang and Yang, 2011; Zhankui and Sun, 2013). In Aghababa and Aghababa (2012a, 2012b), Li et al. (2013), Sun et al. (2014), Sun et al. (2016a, 2016b) and Wang et al. (2014, 2015), adaptive laws are used only to estimate unknown parameters; these finite-time control schemes still require information on the upper bound of the unknown parameters or did not consider other uncertainties and external disturbances. Sun et al. (2016b) and Wu et al. (2016) solved the adaptive finite-time synchronization of a nonlinear resource management system by incorporating the adaptive control and the finite-time stability theory. Nevertheless, the update laws designed as either equation (16) by Sun et al. (2016b) or equations (13) and (21) by Wu et al. (2016) are infeasible in practice because of the requirement of the true values of the unknown parameters; this problem was mentioned by Sun et al. (2013). In Zhankui and Sun (2013), chaos control of a micro-electro-mechanical system is realized; however, prior knowledge is still required regarding the upper bound of the estimated parameters. The anti-synchronization of uncertain chaotic systems is studied by Fang et al. (2013), but without any mention of finite-time convergence analysis. In fact, the analysis by Fang et al. (2013) and Yang and Yang (2011) revealed that these techniques guarantee only asymptotic stability; that is, the synchronization errors converge to zero with infinite settling time. Moreover, the control schemes in Fang et al. (2013), Yang and Yang (2011) and Zhankui and Sun (2013) employ terminal sliding mode surfaces that introduce a singularity problem (Park and Lee, 1996) This drawback is avoided by some indirect approaches that make the design procedure more complicated.
Furthermore, most of the aforementioned adaptive finite-time control methods employed high-frequency control switching that unavoidably introduces a chattering phenomenon, which can lead to degradation of the chaos control performance and destroy the synchronization. Some schemes have been proposed to address this issue, such as the use of a saturation function, relay function or a hyperbolic
To the best of the authors’ knowledge, adaptive finite-time MFPLS of chaotic (hyperchaotic) systems in spite of parameter uncertainties/unknown parameters and unknown external disturbances has not been studied to date.
Motivated by the above discussion and on the basis of the nonsingular terminal sliding mode control and adaptive super-twisting algorithm (Laghrouche et al., 2015; Moreno and Osorio, 2012), this paper aims to design a new adaptive controller to achieve adaptive finite-time MFPLS of uncertain hyperchaotic systems. The proposed method fulfils the following objectives:
the MFPLS error converges to zero in a finite amount of time;
the need for a prior knowledge of the upper bounds of uncertainties and external disturbances is eliminated;
the chattering effect is reduced significantly because the control input signals are continuous;
the global stability and finite-time convergence are rigorously proven.
The rest of this paper is organized into four sections. Firstly, we formulate the problem and give some preliminaries. Secondly, the design procedure of the proposed adaptive control method is introduced in detail. Then, an example is provided to demonstrate the robustness, effectiveness and feasibility of the suggested strategy. Finally, the conclusions are presented.
Problem formulation and preliminaries
Problem formulation
Consider the following two different n-dimensional hyperchaotic systems with uncertainties and external disturbances.
Master system

where
Slave system

where
The MFPLS error between the master system and the slave system is defined by

where
By combining equations (1) and (2), the MFPLS error dynamics is obtained as follows


and

It is obvious that the finite-time MFPLS problem between systems (1) and (2) is equivalent to the finite-time stabilization problem of error system (3). Therefore, the main goal of this article is to design control laws
Preliminaries
In this section, we introduce some key results needed for the remainder of the paper.


Assume that the perturbation term

for some unknown constant

where

where k is an arbitrary positive value. Then, the trajectories of system (7) converge to zero in finite time, if

Throughout this paper, ||·|| and

where

It can be verified that as

Main results
The design procedure of the proposed adaptive finite-time control method includes two major steps. The first step is to select appropriate nonsingular terminal sliding mode surfaces, which should have the prescribed desirable dynamic characteristics. The next step is to design a control law to ensure that sliding motion occurs and that the MFPLS errors thus converge to zero in a finite time.
Design of nonsingular terminal sliding mode surfaces
For the first step, we propose novel nonsingular terminal sliding mode surfaces as follows

where
Based on sliding mode control theory, when the system operates in the sliding mode, the following equations are satisfied (Utkin, 1992)

Therefore, the sliding mode dynamics can be obtained as



Differentiating (16) and combining it with (14), we obtain
Since
From (17), we have

It follows that
Taking the integral of both sides of which from 0 to
It can be easily to show that

In fact
Now that suitable nonsingular terminal sliding mode surfaces have been selected, the next step is to design control laws to guarantee the occurrence of sliding mode motion in a finite time.
Design of control laws
The proposed controller is summarized in Theorem 2.
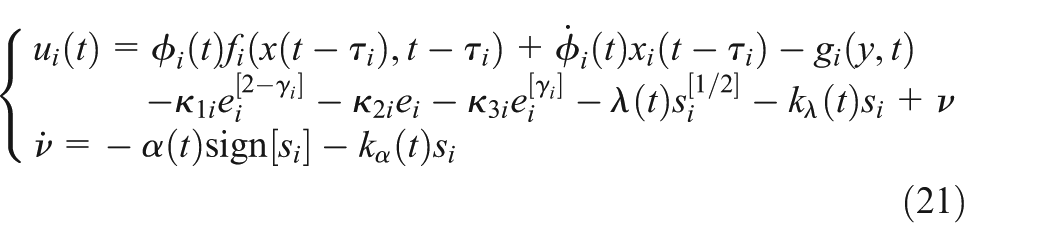
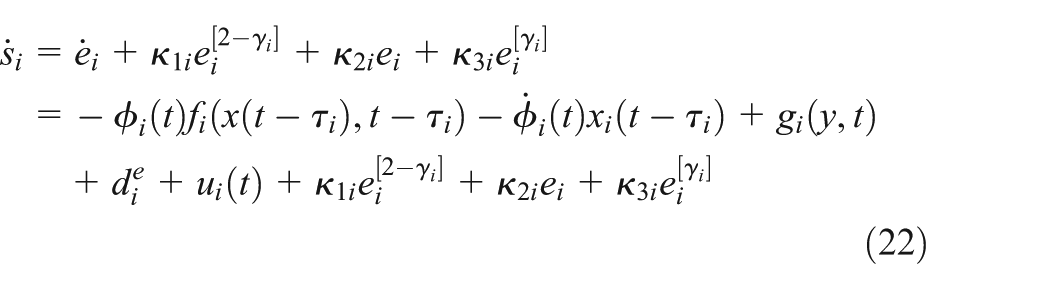
Substituting the control laws from (21) into (22) yields

Define the following new variable

Then, system (23) can be rewritten in the new

Hence, on the basis of Assumption 1 and Lemma 2, the trajectories of system (23) converge to zero in a finite time. This means that the sliding mode motions, that is,
Numerical simulation
This section presents an illustrative example to demonstrate the feasibility and effectiveness of the proposed control method in adaptive finite-time MFPLS between two uncertain hyperchaotic systems. The uncertain hyperchaotic Lü system (Chen et al., 2006) and the uncertain hyperchaotic Lorenz system (Wang and Wang, 2008) are assumed as the master system and the slave system, respectively. In the numerical simulations, the fourth-order Runge–Kutta method is used to solve the systems with a time step size of 0.001.
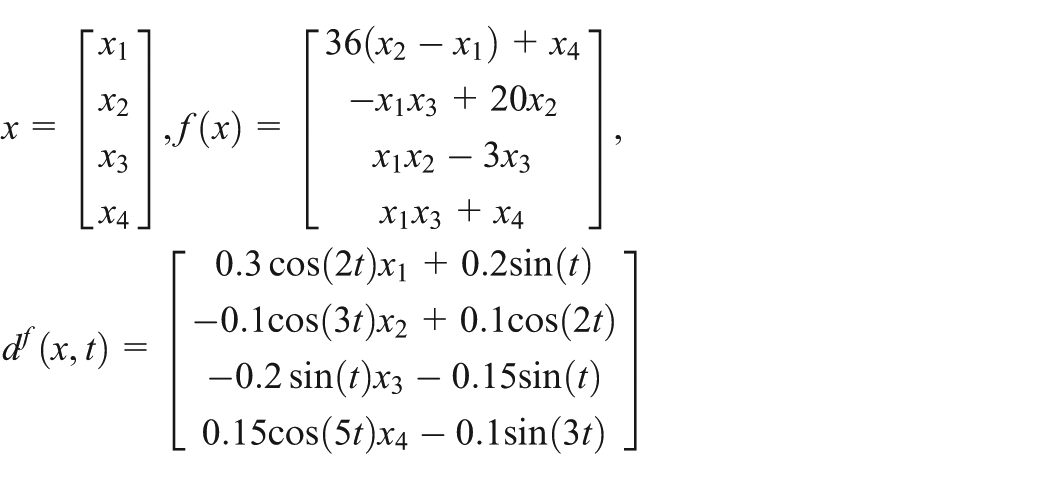
The master system given by

where
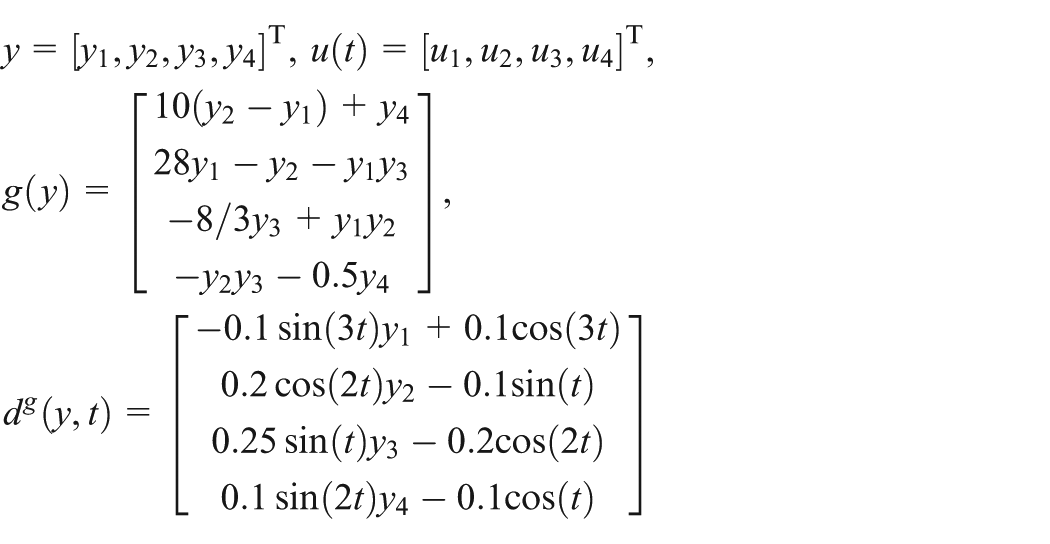
The slave system is described as follows

where
The initial states of systems (26) and (27) are chosen as
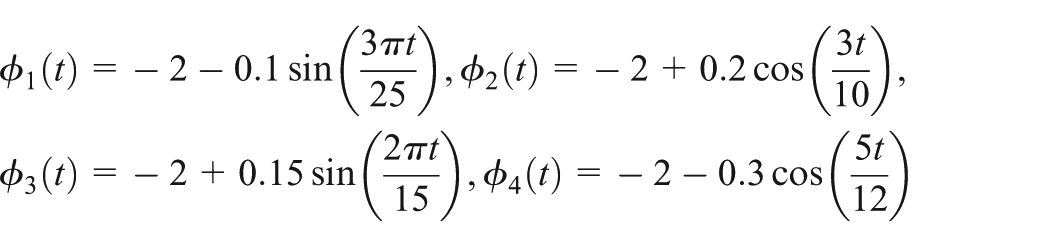
The nonsingular terminal sliding surfaces are designed as (12) with the parameter values set as
The numerical simulation results are depicted in Figures 1 and 2. Figure 1(a) shows the time evolution of the MFPLS errors. It is observed that all of the synchronization errors approach zero quickly in a finite amount of time, which implies that the finite-time MFPLS between the slave system and master system is obtained as shown in Figure 1(b). The errors in the transient response of the closed-loop system are quite large. A better transient performance can be obtained by changing
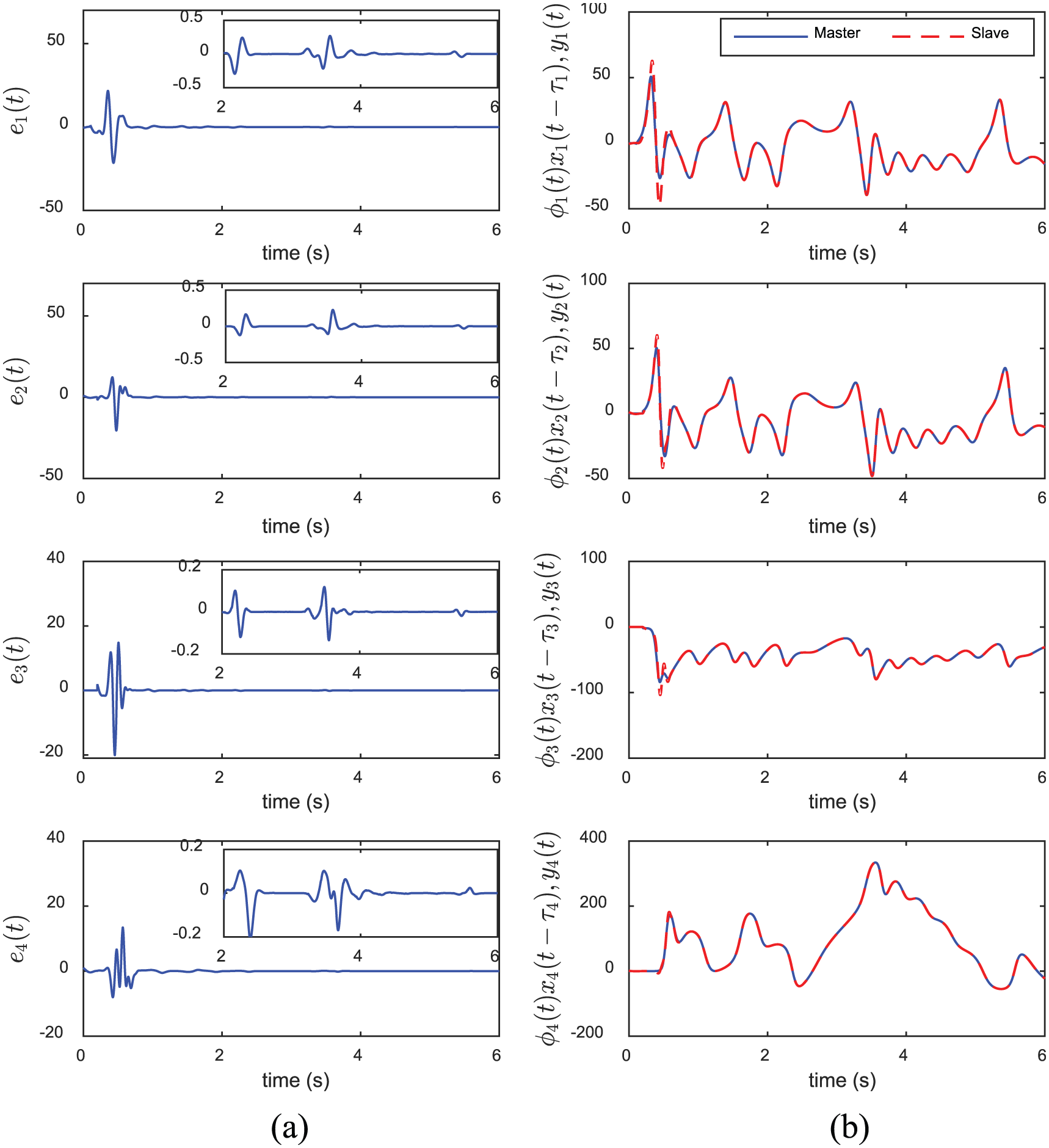
The time histories of the modified function projective lag synchronization: (a) errors; (b) trajectories.
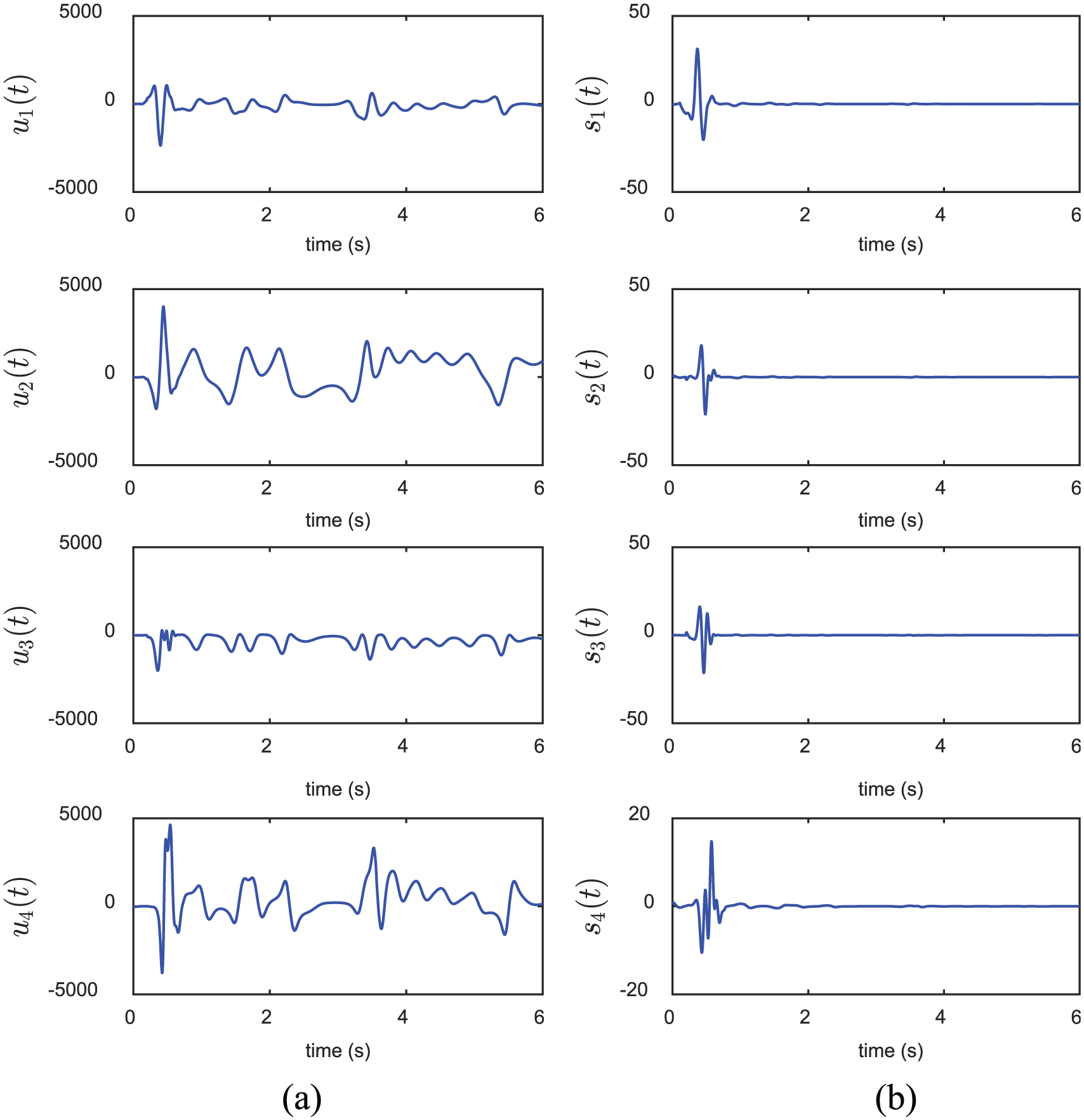
Time histories: (a) control input signals; (b) nonsingular terminal sliding surfaces.
Conclusions
Herein we have introduced a new continuous adaptive finite-time control method for MFPLS of hyperchaotic systems in spite of uncertainties and unknown external disturbances. The proposed method was successfully applied to achieve the adaptive finite-time MFPLS between two uncertain hyperchaotic systems. The simulation results demonstrated the effectiveness and feasibility of the suggested method and validated the theoretic results. It is worth noting that the proposed method could be extended to either chaos control problems or synchronization types of hyperchaotic systems with different orders and time delays.
Future research will focus on the investigation of adaptive finite-time synchronization of different fractional-order hyperchaotic systems with unknown uncertainties, external disturbances and input nonlinearity.
Footnotes
Declaration of Conflicting Interests
The authors declare that there is no conflict of interests.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is the result of a study on the “Leaders Industry-university Cooperation” Project, supported by the Ministry of Education (MOE).