This paper investigates the problem of elimination of overflow oscillations in fixed-point state-space digital filters using generalized overflow non-linearities and external disturbance. The generalized overflow non-linearities under consideration cover the common types of overflow arithmetic used in practice, for instance zeroing, two’s complement, triangular and saturation. New criteria are established to ensure not only exponential stability, but also reduction in the effect of external disturbance to an norm constraint. The obtained criteria are in linear matrix inequality (LMI) framework and, hence, are computationally tractable. The presented approach constitutes a generalization over several previously reported approaches for the elimination of overflow oscillations. For saturation non-linearities, the presented result turns out to be less conservative than several existing criteria. Numerical examples are provided to demonstrate the effectiveness of the presented approach.
This paper, therefore, studies the problem of exponential stability and performance of fixed-point state-space digital filters under the effect of generalized overflow non-linearities and external disturbance. The paper is organized as follows: in the next section, a description of system under consideration is given. New linear matrix inequality (LMI)-based criteria for the exponential stability and performance of fixed-point state-space digital filters with generalized overflow non-linearities and external disturbance are established. Several numerical examples are provided to demonstrate the effectiveness of the presented results.
System description
This paper considers the problem of exponential stability and performance of fixed-point state-space interfered digital filters, which operate under the effect of generalized overflow non-linearities. Specifically, the system under consideration is given by
where is a state vector, is an external disturbance, represents generalized overflow non-linearities, is the coefficient matrix. The generalized overflow characteristic is given by
where
By suitable selection of L, (2) represents the various overflow non-linearities used in practice, i.e. saturation , zeroing , two’s complement , triangular , etc.
Now we recall the following definitions.
Definition 1(Liu and Michel, 1992). The equilibrium of system (1) without external interference is said to be asymptotically stable if (i) it is stable in the sense of Lyapunov, i.e. for every there is a such that for all whenever and (ii) every solution of (1) tends to the origin as , i.e. .
Definition 2(Yeganefar et al., 2013). The equilibrium of system (1) without external interference is called exponentially stable if there exist constants and such that for every trajectory x and all , we have .
For a known interference attenuation level , the paper aims to establish criteria such that the system (1)–(3) with is exponentially stable and
under zero-initial conditions for all non-zero , where S is a positive definite symmetric matrix. In this case, the system (1)–(3) is said to be exponentially stable with performance .
Equations (1)–(3) can be used to describe a broader class of realistic interfered discrete-time dynamical systems, which include digital filters implemented with finite wordlength register and external disturbance, digital control systems in presence of external disturbance and overflow non-linearities, neural networks defined on hypercubes, material rolling process, metal cutting process and many other engineering problems.
The problem of exponential stability and performance of fixed-point state-space digital filters subject to the saturation non-linearities (L=1) has been studied in Ahn (2011) and Kokil et al. (2012). The main result of Kokil et al. (2012) may be stated as follows.
Theorem 1(Kokil et al., 2012).
For a given level , suppose there exist positive definite symmetric matrices , and a positive scalar such that
where N is a row diagonally dominant matrix with positive diagonal elements, then the system (1) employing saturation arithmetic is exponentially stable with performance .
Main results
Consider the following two ranges for L:
These two ranges together constitute (3). In the following, a criterion applicable to (6) and a different criterion applicable to (7) for the exponential stability of (1) and (2) with performance employing generalized overflow arithmetic are presented.
Several useful lemmas, which are needed in the proof of our main results are given in Appendix A. Pertaining to (1), (2) and (6), our main result may be stated as follows.
Theorem 2. For a known interference attenuation level , if there exist positive definite symmetric matrices and such that
where and are characterized by (A.1) and (A.4), respectively, then the system (1), (2) and (6) is exponentially stable with performance .
Proof. Consider the following Lyapunov function
which satisfies the following Rayleigh inequality (Strang, 1986)
where and represent minimum and maximum eigenvalue of matrix P, respectively.
Application of (9) to (1a) leads to
By using Lemmas A.1 and A.2, it follows from (11) that
where
Thus, if (8) is satisfied then
Summation both sides of (14) from 0 to yields
As and , the relation (4) follows trivially from (15).
Now, it remains to show that, under the condition (8), the system (1), (2) and (6) with is exponentially stable. When , (14) implies
In the light of Theorem 3.1 in Lee (2002), (10) and (16) guarantee the exponential stability of the system under consideration. This completes the proof of Theorem 2.
Remark 1. The matrix inequality (8) is linear in the unknown parameters , , , , , S and P. Therefore, (8) can be easily solved using MATLAB LMI Toolbox (Boyd et al., 1994; Gahinet et al., 1995; Sturm, 1999).
Remark 2. It may be observed that, for saturation non-linearities (i.e. L = 1), C (A.4) in Theorem 2 is identified as a general row diagonally dominant matrix N with positive diagonal elements and G (A.1) becomes a general symmetric positive definite row diagonally dominant matrix (Dey and Kar, 2011a). Consequently, with and , (8) reduces to (5). Thus, Theorem 1 is recovered from Theorem 2 as a special case.
Remark 3. By selecting = and (i.e. saturation non-linearities), the matrix given by (A.4) reduces to a positive definite diagonal matrix. Therefore, Theorem 1 in Kokil et al. (2012) is a special case of Theorem 2, i.e. corresponding to =, and . Referring to the saturation non-linearities, the superiority of Theorem 2 will be illustrated in Example 1.
The stability result for the system described by (1), (2) and (7) may be stated as follows.
Theorem 3.For a given interference attenuation level , suppose there exist positive definite symmetric matrices , and a positive definite diagonal matrix satisfying
where is characterized by (A.1), then the system (1), (2) and (7) is exponentially stable with performance .
Proof. By employing Lemmas A.1 and A.3, (11) yields
if (17) holds true. By summing both sides of (19) over and making use of the relations , , one can obtain (4). Furthermore, it follows from (19) that
if . According to Theorem 3.1 in Lee (2002), (10) and (20) ensure the exponential stability of the system under consideration. This completes the proof of Theorem 3.□
Remark 5. For triangular and two’s complement overflow non-linearities, one is required to choose L = −1 in Theorem 3, in which case G characterized by (A.1) reduces to a positive definite diagonal matrix. Observe that (2) together with (7) fails to make any distinction between triangular and two’s complement overflow non-linearities. Therefore, the characterization of triangular non-linearities with the help of (2) and (7) appears to be overly restrictive.
Finally, consider a class of non-linearities confined to the sector [L, 1], i.e.
where
In (21a), one is required to choose L = −1/3 for triangular overflow arithmetic and L = −1 for two’s complement overflow arithmetic.
Pertaining to the system (1) and (21), we have the following result.
Theorem 4.For a given interference attenuation level , if there exist positive definite symmetric matrices , and positive definite diagonal matrices and satisfying
then the system (1) and (21) is exponentially stable with performance .
Proof. For a positive diagonal matrix , we have
in view of (21). Moreover, (A.7) holds true for the non-linearities given by (21). Therefore, from (11), the upper bound of can be obtained as
where .
If (22) is satisfied, then
Summing both sides of (25) over and using , , one arrives at (4). With , (25) leads to
In view of Theorem 3.1 in Lee (2002), the exponential stability of the system is assured by (10) and (26). This completes the proof of Theorem 4.□
Remark 6. It may be noted that Theorem 4, unlike Theorem 3, makes distinction between triangular and two’s complement overflow non-linearities. It has been observed that, for triangular overflow arithmetic, Theorem 4 always leads to more relaxed stability conditions than Theorem 3.
Remark 7. It is obvious that the presented criteria (Theorems 2–4) for exponential stability also imply asymptotic stability. This ensures the absence of overflow oscillations in the realized digital filter.
Remark 8. Recently, Ahn (2013c, 2014b) has proposed novel stability criteria for two-dimensional (2-D) digital filters with external interference and saturation arithmetic. The criteria in those studies have been derived by making use of the sector information of the saturation non-linearities. On the other hand, the presented approach utilizes a more precise characterization of the saturation non-linearities (namely (A.3) and (A.6)) than the approaches in Ahn (2013c, 2014b). Moreover, the criteria in those articles are not applicable to 2-D systems involving triangular or two’s complement overflow arithmetic. The possible extension of the presented approach to the study of stability of 2-D interfered digital filters using generalized overflow arithmetic appears to be an interesting problem for future investigation.
where is a transfer function matrix from to . As discussed in Ahn (2011), the relation (4) can be represented by where
Numerical examples
To demonstrate the usefulness of the proposed results, let us consider the following examples.
Example 1
Consider a specific example of the system (1) and (2) with
Pertaining to the design objective (8), assume the performance be specified by . Using the MATLAB LMI toolbox (Boyd et al., 1994; Gahinet et al., 1995), it can easily be verified that Theorem 1 of Kokil et al. (2012) fails to establish the exponential stability of the present system. Furthermore, in view of Lemma 1 in that study, it turns out that the present example falls outside the application scope of Theorem 1 in that same study. On the other hand, (8) is feasible for the following values of unknown parameters:
Thus, Theorem 2 succeeds to determine the exponential stability of the system with performance level .
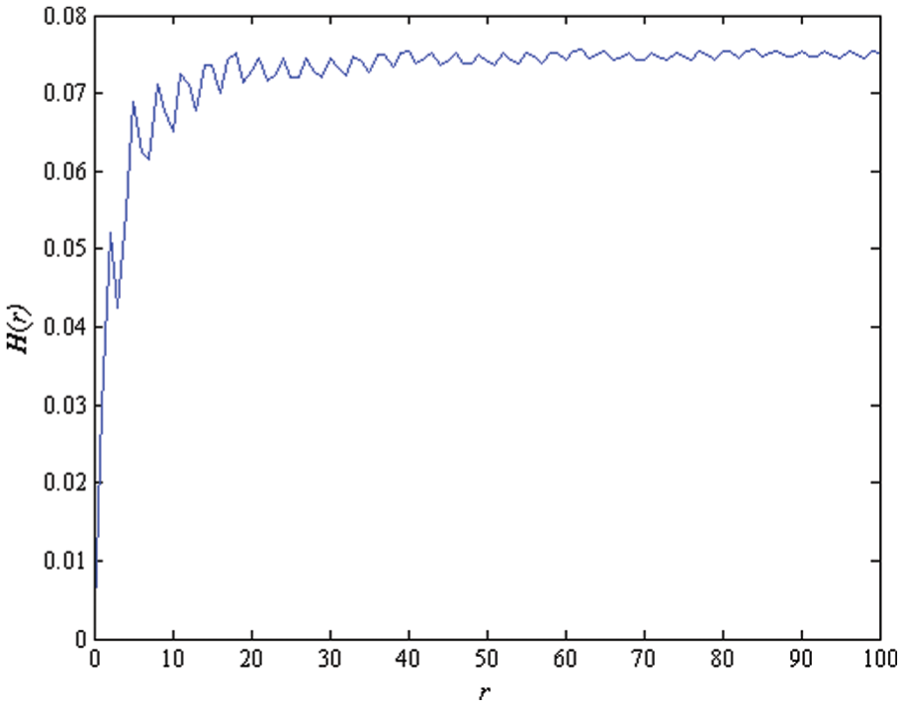
Figure 1 shows the plot of H(r) for the example under consideration. From Figure 1, it is clear that and consequently the norm from the external disturbance w(r) to the state vector x(r) is reduced within the norm bound . Hence, according to Theorem 2, the system under consideration is exponentially stable with performance .
The plot of H(r) for Example 1.
Example 2
Consider a second-order system (1) and (2) with
Let the performance level be specified as . It turns out that (8) is feasible for the following values of unknown parameters
Therefore, according to Theorem 2, the system is exponentially stable with performance .
Figure 2 depicts the plot of H(r) for the example under consideration. From Figure 2, it is clear that = and consequently, the norm from the external disturbance w(r) to the state vector x(r) is reduced within the norm bound .
The plot of H(r) for Example 2.
Example 3
Consider the discrete-time system described by (1) and (2) with the following parameters
and performance . For the present example, (17) gives the following feasible solutions
Thus, Theorem 2 assures the system is exponentially stable with performance .
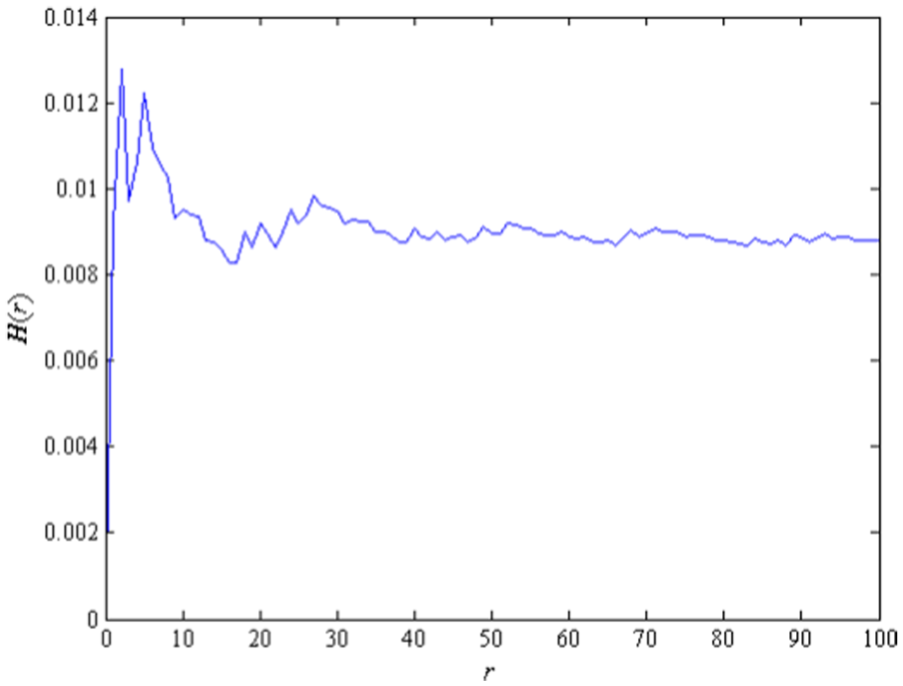
Figure 3 demonstrates the plot of H(r) and it is clear that =. Consequently, the norm from the external disturbance w(r) to the state vector x(r) is reduced within the norm bound .
The plot of H(r) for Example 3.
Example 4
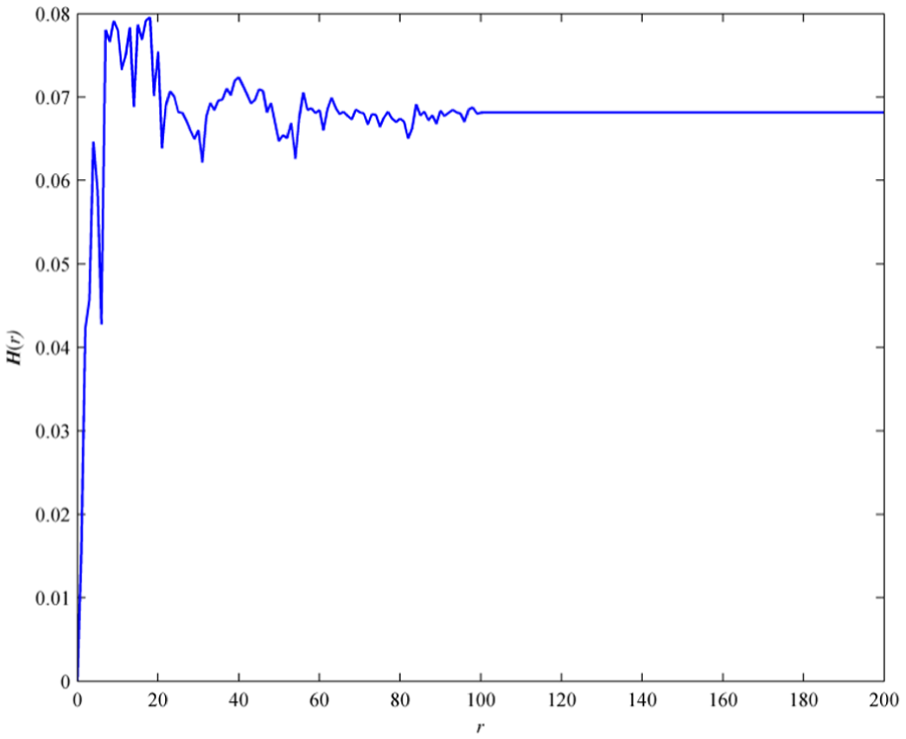
Consider a third-order system (1)–(3) with
where , and are Gaussian noises with mean 0 and variance 1. Let the performance is specified by . By using MATLAB LMI toolbox (Boyd et al., 1994; Gahinet et al., 1995), one can verify that Theorem 2 is feasible for the following values of unknown parameters:
Thus, Theorem 2 verifies the exponential stability of the present system with performance in this example.
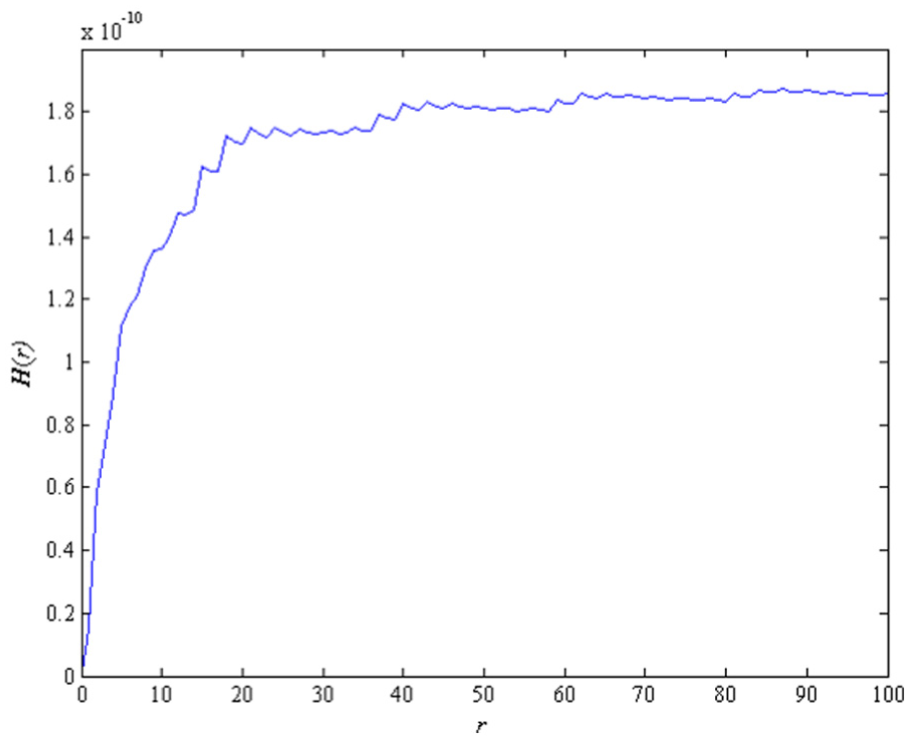
Figure 4 shows the plot of H(r) for the example under consideration, which makes clear that = 0.36 and thus the norm from the external disturbance w(r) to the state vector x(r) is reduced within the norm bound .
The plot of H(r) for Example 4.
Conclusion
LMI-based sufficient conditions are established for the exponential stability and performance of fixed-point state-space digital filters with generalized overflow non-linearities and external interference. Pertaining to the saturation non-linearities, the proposed approach turns out to be less conservative than those in Ahn (2011) and Kokil et al. (2012). The worthiness of the proposed approach is verified with the help of several numerical examples.
Footnotes
Appendix A
When , G corresponds to a positive scalar. Then
where is given by (2) and (3).
For , C corresponds to a positive scalar. Then
where is specified by (2) and (7).
holds true for the non-linearities given by (2) and (8).
Appendix
Acknowledgements
The authors thank the Editors and the reviewers for their constructive comments and suggestions to improve the manuscript.
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.
References
1.
AhnCK (2011) Criterion for the elimination of overflow oscillations in fixed-point digital filters with saturation arithmetic and external disturbance. International Journal of Electronics and Communication65(9): 750–752.
2.
AhnCK (2013a) l2−l∞ stability criterion for fixed-point state-space digital filters with saturation nonlinearity. International Journal of Electronics100(9): 1309–1316.
3.
AhnCK (2013b) IOSS criterion for the absence of limit cycles in interfered digital filters employing saturation overflow arithmetic. Circuits, Systems and Signal Processing32(3): 1433–1441.
4.
AhnCK (2013c) Two-dimensional digital filters described by Roesser model with interference attenuation. Digital Signal Processing23(4): 1296–1302.
5.
AhnCK (2014a) Two new criteria for the realization of interfered digital filters utilizing saturation overflow nonlinearity. Signal Processing95: 171–176.
6.
AhnCK (2014b) A new realization criterion for 2-D digital filters in the Fornasini–Marchesini second model with interference. Signal Processing104: 225–231.
7.
AhnCK (2015) Dissipativity analysis for fixed-point interfered digital filters. Signal Processing109: 148–153.
8.
AhnCKKimPS (2013) New peak-to-peak state-space realization of direct form interfered digital filters free of overflow limit cycles. International Journal of Innovative Computing, Information and Control9(8): 3285–3291.
9.
AhnCKLeeYS (2012) Induced l∞ stability of fixed-point digital filters without overflow oscillations and instability due to finite word length effects. Advances in Difference Equations2012(51):1–7.
10.
BoseTChenMQ (1991) Overflow oscillations in state-space digital filters. IEEE Transactions on Circuits and Systems38(7): 807–810.
11.
BoydSGhaouiElFeronE. (1994) Linear Matrix Inequalities in System and Control Theory. Philadelphia, PA: SIAM.
12.
DeyAKarH (2011a) Robust stability of 2-D discrete systems employing generalized overflow nonlinearities: an LMI approach. Digital Signal Processing21(2): 262–269.
13.
DeyAKarH (2011b) LMI-based criterion for the robust stability of 2D discrete state-delayed systems using generalized overflow nonlinearities. Journal of Control Science and Engineering2011(271515): 1–12.
14.
EbertPMMazoJETaylorMG (1969) Overflow oscillations in digital filters. Bell System Technical Journal48(9): 2999–3020.
15.
GahinetPNemirovskiALaubAJ. (1995) LMI Control Toolbox. Natick, MA: Mathworks.
16.
KandanvliVKRKarH (2008) Robust stability of discrete-time state-delayed systems employing generalized overflow nonlinearities. Nonlinear Analysis: Theory, Methods & Applications69(9): 2780–2787.
17.
KandanvliVKRKarH (2012) A delay-dependent approach to stability of uncertain discrete-time state-delayed systems with generalized overflow nonlinearities. ISRN Computational Mathematics2012(171606): 1–6.
18.
KarH (2007) An LMI based criterion for the nonexistence of overflow oscillations in fixed point state-space digital filters using saturation arithmetic. Digital Signal Processing17(3): 685–689.
19.
KarH (2010) An improved version of modified Liu–Michel’s criterion for global asymptotic stability of fixed-point state space digital filters using saturation arithmetic. Digital Signal Processing20(4): 977–981.
20.
KarHSinghV (2000) Stability analysis of 2-D state-space digital filters with overflow nonlinearities. IEEE Transactions on Circuits and Systems – I: Fundamental Theory and Applications47(4): 598–601.
21.
KarHSinghV (1998) A new criterion for the overflow stability of second-order state-space digital filters using saturation arithmetic. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications45(3): 311–313.
22.
KarHSinghV (2001) Stability analysis of 2-D digital filters described by the Fornasini–Marchesini second model using overflow nonlinearities. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications48(5): 612–617.
23.
KokilP (2014) An LMI based criterion for global asymptotic stability of discrete-time state-delayed systems with saturation nonlinearities. International Scholarly Research Notices2014(761959): 1–6.
24.
KokilPKarH (2012) An improved criterion for the global asymptotic stability of fixed-point state-space digital filters with saturation arithmetic. Digital Signal Processing22(6): 1063–1067.
25.
KokilPKandanvliVKRKarH (2012) A note on the criterion for the elimination of overflow oscillations in fixed-point digital filters with saturation arithmetic and external disturbance. AEU-International Journal of Electronics and Communication66(9): 780–783.
26.
KokilPShindeSS (2015) An improved criterion for peak-to-peak realization of direct-form interfered digital filters employing saturation nonlinearities. COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering34(3): 996–1010.
27.
KokilPShindeSS (2016) A note on the induced l∞ stability of fixed-point digital filters without overflow oscillations and instability due to finite wordlength effects. Circuits, Systems, and Signal Processing DOI: 10.1007/s00034–016–0348-x.
28.
LeeJ (2002) Constructive and discrete versions of the Lyapunov’s stability theorem and the LaSalle’s invariance theorem. Communications Korean Mathematical Society17(1): 155–163.
29.
LiTZhengWX (2012) New stability criterion for fixed-point state-space digital filters with generalized overflow arithmetic. IEEE Transactions on Circuits and Systems II: Express Briefs7(59): 443–447.
30.
LiuDMichelAN (1992) Asymptotic stability of discrete-time systems with saturation nonlinearities with applications to digital filters. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications39(10): 798–807.
31.
MonteiroJLeukenRV (2010) Integrated Circuit and System Design: Power and Timing Modelling, Optimization and Simulation. Berlin: Springer.
32.
SandbergIW (1979) The zero-input response of digital filters using saturation arithmetic. IEEE Transactions on Circuits and Systems26(11): 911–915.
33.
SinghV (1985) A new realizability condition for limit cycle-free state-space digital filters employing saturation arithmetic. IEEE Transactions on Circuits and Systems32(10): 1070–1071.
34.
SinghV (2006) Elimination of overflow oscillations in fixed-point state-space digital filters using saturation arithmetic: an LMI approach. Digital Signal Processing16: 45–51.
35.
StoorvogelA (1992) The H∞ Control Problem: A State-space Approach. Hemel Hempstead: Prentice Hall.
36.
StrangG (1986) Introduction to Applied Mathematics. Cambridge: Wellesley Cambridge Press.
37.
SturmJF (1999) Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optimization Methods and Software11(12): 625–653.
38.
TsividisY (2002) Mixed Analog–Digital VLSI Devices and Technology. Singapore: World Scientific Publishing.
39.
YeganefarNGhamguiMMoulayE (2013) Lyapunov theory for 2-D nonlinear Roesser models: application to asymptotic and exponential stability. IEEE Transactions on Automatic Control58(5): 1299–1304.