
Abstract
This paper considers the problem of global asymptotic stability of a class of uncertain discrete-time systems under the influence of finite wordlength nonlinearities (quantization and/or overflow) and time-varying delays. The parameter uncertainties are assumed to be norm-bounded. Utilizing the concept of a Wirtinger-based inequality and a reciprocally convex method, two delay-dependent stability criteria are presented. The selection of the criteria depends on the type of the nonlinearities, that is, a combination of quantization and overflow or saturation overflow nonlinearities involved in the present systems. The approach presented in this paper yields less conservative results and reduces the computational burden as compared to previously reported criteria. Numerical examples are given to illustrate the effectiveness of the presented approach.
Keywords
Introduction
In the implementation of stable and linear discrete-time dynamical systems using finite wordlength processors with fixed-point arithmetic, one commonly encounters several kinds of nonlinearities (e.g. quantization and overflow nonlinearities). These finite wordlength nonlinearities may lead to instability in the designed system. The instability may arise in the form of zero-input limit cycles, which characterize nonlinear systems. While designing a discrete-time system under finite wordlength implementation it is, therefore, important to determine the range of system parameters such that the system is free of limit cycles. The quantization and overflow nonlinearities may interact with each other, motivating a considerable number of studies on their combined effects (Kandanvli and Kar, 2009a, 2011; Kar and Singh, 2001; Sim and Pang, 1985; Singh, 2013; Tadepalli and Kandanvli, 2016). However, if the wordlength is large, then the effects of quantization and overflow may be regarded as non-interacting (Claasen et al., 1976; Kandanvli and Kar, 2009a; Singh, 2008; Tadepalli and Kandanvli, 2016). Under this condition, quantization effects are neglected when studying the effects of overflow (Chen, 2009; Kandanvli and Kar, 2009b, 2013; Singh, 2013; Tadepalli and Kandanvli, 2016; Tadepalli et al., 2014, 2015) and vice versa (Bose, 1994; Dewasurendra and Bauer, 2008). Saturation overflow nonlinearity, owing to its larger stability region, has also been widely studied (Chen, 2009; Kandanvli and Kar, 2009b, 2013; Kar, 2007; Singh, 2006; Song and Wang, 2013; Tadepalli and Kandanvli, 2016; Tadepalli et al., 2014, 2015). Therefore, the stability analysis of discrete-time systems under the influence of finite wordlength nonlinearities is considered to be an important subject of system theoretic study (Chen, 2009; Claasen et al., 1976; Kandanvli and Kar, 2009a,b, 2011, 2013; Kar and Singh, 2001; Sim and Pang, 1985; Singh, 2008, 2013; Tadepalli and Kandanvli, 2016; Tadepalli et al., 2014, 2015).
Apart from the instabilities due to finite wordlength implementation, the presence of parameter uncertainties and delays may also lead to instability in discrete-time systems. It is well known that, while deriving delay-dependent stability criteria for such systems, the issue of computational burden may play a vital role (see the recent works by Nam et al., 2015, and Seuret et al., 2015). Several studies have been performed on the stability of discrete-time systems under the simultaneous influence of finite wordlength nonlinearities, parameter uncertainties and delays (Kandanvli and Kar, 2008, 2009a,b, 2011, 2013; Tadepalli and Kandanvli, 2016; Tadepalli et al., 2014, 2015). Examples of such systems include digital control systems (Tadepalli et al., 2015), digital filter design (Bose, 1994; Chen, 2009; Kandanvli and Kar, 2009a,b, 2011, 2013; Kar and Singh, 2001; Singh, 2008, 2013; Tadepalli and Kandanvli, 2016; Tadepalli et al., 2014), neural networks defined on hypercubes (Kandanvli and Kar, 2009a), combined marketing and production problems (Kandanvli and Kar, 2008, 2009b; Tadepalli and Kandanvli, 2016), and so on.
In Kandanvli and Kar (2008, 2009b), delay-independent stability criteria have been established for discrete-time systems in the presence of overflow nonlinearities, uncertainties and constant delays. A delay-dependent stability criterion for discrete-time systems with saturation nonlinearities and interval-like time-varying delays has been given in Chen (2009). In Kandanvli and Kar (2009a), a delay-independent stability problem for the global asymptotic stability of uncertain discrete-time delayed systems under the combined influence of quantization and overflow nonlinearities has been studied, whereas Kandanvli and Kar (2011) consider a delay-dependent stability problem employing a free-weighting matrix (FWM) approach (He et al., 2008). Lee et al. (2012) provide a delay-dependent regional asymptotic stability criterion for discrete-time delayed systems with saturation nonlinearity. By utilizing a FWM approach, delay-dependent stability analysis of uncertain discrete-time delayed systems under the influence of saturation nonlinearities has been performed in Kandanvli and Kar (2013). Recently, in Tadepalli and Kandanvli (2016), two delay-dependent stability criteria have been established for discrete-time systems under the influence of saturation nonlinearities and for systems involving composite nonlinearities (i.e. a combination of quantization and overflow nonlinearities), respectively. The criteria developed in Tadepalli and Kandanvli (2016) are based on utilizing both delay-partitioning and reciprocally convex methods. Although some results are available on the delay-dependent stability of discrete-time systems involving finite wordlength nonlinearities, parameter uncertainties and time-varying delays, there still remains great scope for improvement in terms of conservativeness and computational burden.
In this paper, motivated by the preceding discussion, we revisit the problem of stability of discrete-time systems under the influence of finite wordlength nonlinearities, parameter uncertainties and time-varying delays. The larger the stability region in the parameter space of a discrete-time system, the greater would be the flexibility in selecting the system parameters. In other words, the important objective in the design of a discrete-time system is to have an efficient (less conservative and smaller computational burden) criterion for choosing the values of the system parameters in the parameter space so that the designed system is globally asymptotically stable. However, it remains a challenge to derive such a criterion for testing the stability of discrete-time systems, particularly in the simultaneous presence of finite wordlength nonlinearities, parameter uncertainties and time-varying delays.
The approach presented in this paper utilizes a Lyapunov functional to derive the corresponding linear matrix inequality (LMI)-based stability criteria as feasibility tests. However, selection of an appropriate Lyapunov functional is one of the key steps to reduce the conservativeness, and a lot of work (see, for instance, He et al., 2008; Jiang et al., 2005; Liu and Zhang, 2012; Nam et al., 2015; Seuret et al., 2015) has been done regarding this aspect. To establish delay-dependent stability criteria, several techniques have been employed which include a FWM method (He et al., 2008; Kandanvli and Kar, 2008, 2009a,b, 2011) and the bounding techniques (reciprocal convexity, see Liu and Zhang, 2012; Park et al., 2011; discrete Jensen inequality, see Jiang et al., 2005, etc.) of the cross-terms and sum terms in the forward difference of the Lyapunov functional. Though the FWM method (He et al., 2008) helps in reducing the conservatism, introduction of multiple free parameters makes the criteria more complex and computationally demanding. The reciprocal convexity technique was originally derived for continuous-time systems in Park et al. (2011). It is a lower-bound lemma for a linear combination of positive functions with inverses of convex parameters as the coefficients (Park et al., 2011). The application of a reciprocal convexity technique may support obtaining improvement in terms of conservativeness and number of decision variables. Different from existing techniques (He et al., 2008; Liu and Zhang, 2012; Park et al., 2011), a combination of a discrete version of the Wirtinger-based inequality (Nam et al., 2015), which is much tighter than the discrete Jensen inequality, and a reciprocally convex approach is employed in this paper to derive better results. The efficiency of the presented approach is tested with the help of examples.
The objective of this paper is to derive efficient delay-dependent criteria for the global asymptotic stability of the systems under consideration. Following are the main contributions of the paper. (i) The present system encompasses a broader class of discrete-time systems involving parameter uncertainties, finite wordlength nonlinearities and time-varying delays. (ii) To establish the delay-dependent stability criteria for such systems, a discrete version of the Wirtinger-based inequality (Nam et al., 2015; Seuret et al., 2015) along with a reciprocally convex approach (Liu and Zhang, 2012; Park et al., 2011) are used in this paper, which may provide improvement in terms of computational burden and conservatism. (iii) The criteria presented in this paper are in the form of LMI-based conditions and, therefore, computationally tractable. (iv) A comparison of the present criteria with the previously reported criteria (Kandanvli and Kar, 2011, 2013; Tadepalli and Kandanvli, 2016) is made on the basis of conservatism and computational burden.
The paper is organized as follows. In ‘System description’, the description of system under consideration is given. ‘Main results’ provides the main results of the paper. In ‘Examples’, examples are provided to illustrate the effectiveness of the presented results.
Notation
The following notation is used in this paper:
System description
The system under consideration is represented by



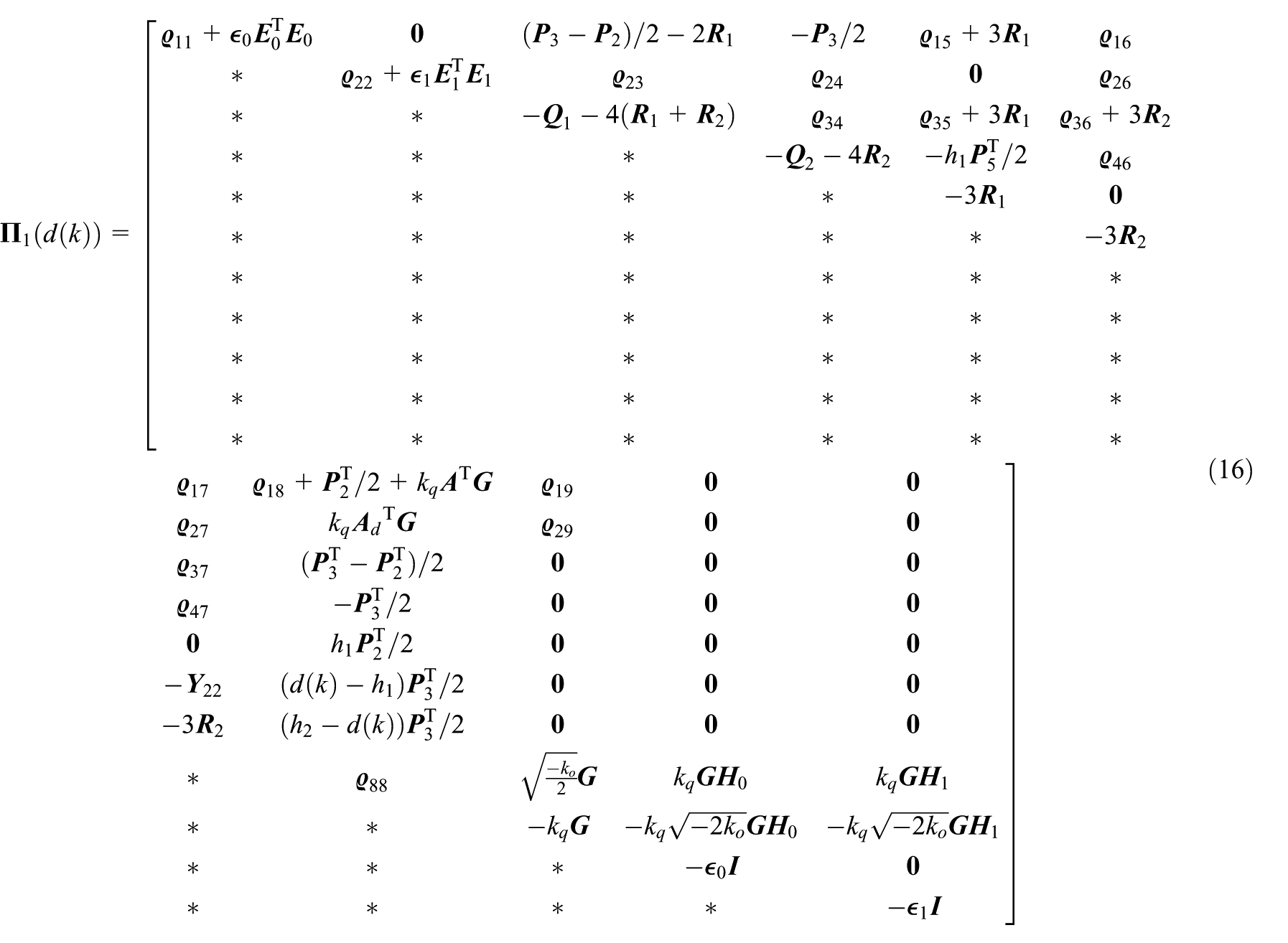
where

where h1 and h2 are known positive integers representing the lower and upper delay bounds, respectively. The uncertainties in the state matrices are assumed to be of the form (Bakule et al., 2006; Kandanvli and Kar, 2009a, 2011; Parlakçı, 2015; Tadepalli and Kandanvli, 2016; Xie et al., 1992)


where

Equations (1) to (3) can be used to describe a broad class of uncertain discrete-time delayed systems involving finite wordlength nonlinearities. Examples of such systems include digital control systems with finite wordlength nonlinearities (Mahmoud, 2013), digital filters implemented in finite register lengths (Kandanvli and Kar, 2009a,b, 2011), fixed-point processors used in sensor networks (Dewasurendra and Bauer, 2008), Hopfield neural networks (Kandanvli and Kar, 2009a), cold rolling mills, and many other engineering problems. One typical example of the system represented by (1)–(3) can be found in networked control systems (Tadepalli and Kandanvli, 2016; Wu et al., 2011), where the delays induced by the network transmission (either from sensor to controller or from controller to actuator) are actually time-varying and can be assumed to have minimum and maximum delay bounds without loss of generality. While implementing the networked control systems using computer or special-purpose hardware with fixed-point arithmetic for data processing in the network transmission, the nonlinearities due to finite wordlength are generated.
The following lemmas play an important role in the proof of our main results.
then
where



The vector


then



Next, we present the main results of the paper. The main results section is divided into two subsections. In the first subsection, the system under consideration (1)–(3) involves, in particular, a combination of quantization and overflow nonlinearities, that is, composite nonlinearities. The second subsection considers the case where the present system (1)–(3) is under the influence of saturation overflow nonlinearities.
Main results
Discrete-time systems under the simultaneous influence of quantization and overflow nonlinearities
Consider the system (1) to (3) under the influence of quantization and overflow nonlinearities (Kandanvli and Kar, 2011; Tadepalli and Kandanvli, 2016):

where

where


Next, we will provide a delay-dependent criterion for the global asymptotic stability of the system given by (1) to (3), (12) and (13).


a positive-definite diagonal matrix
and the following LMIs hold simultaneously:


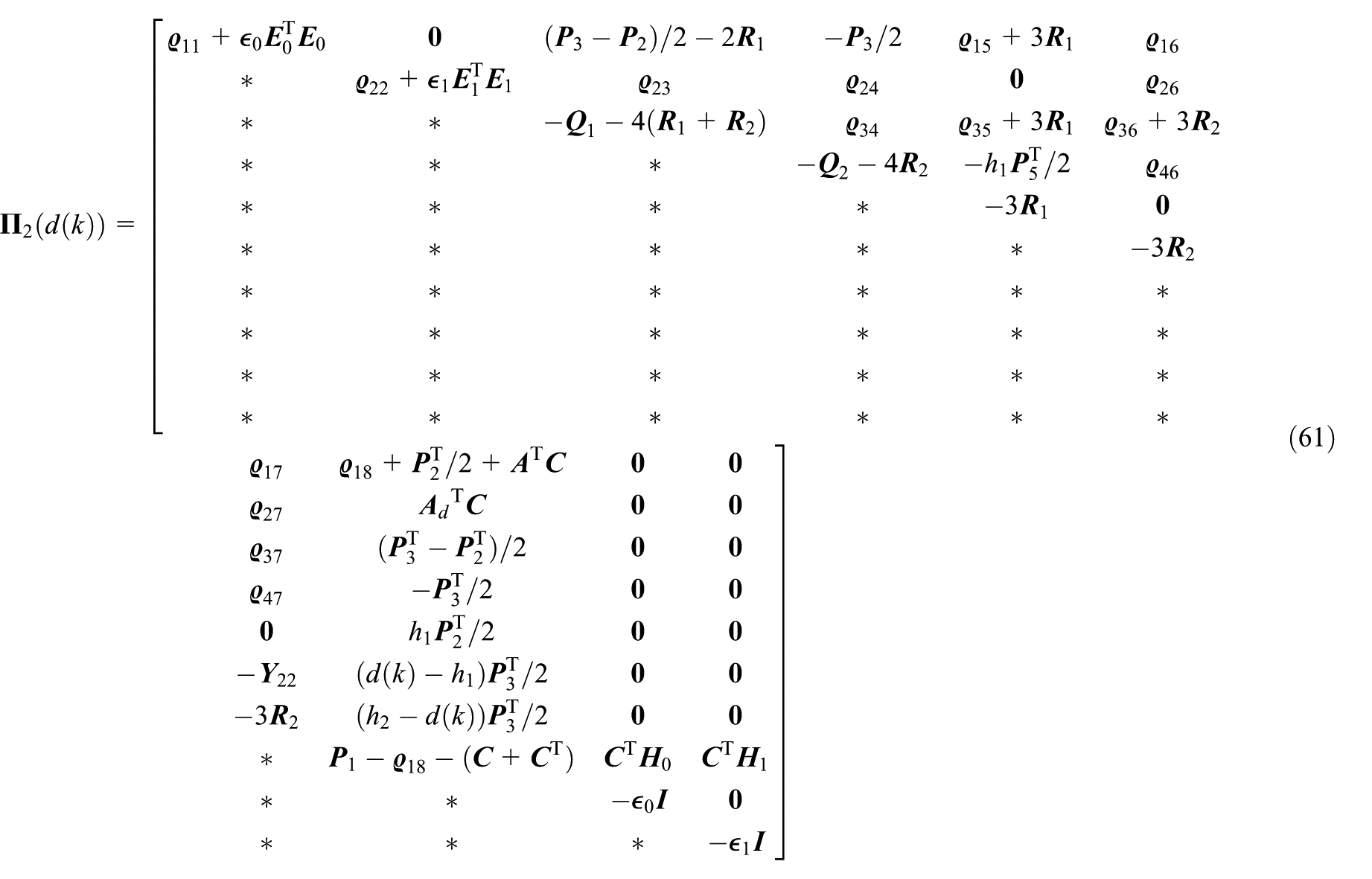
where



















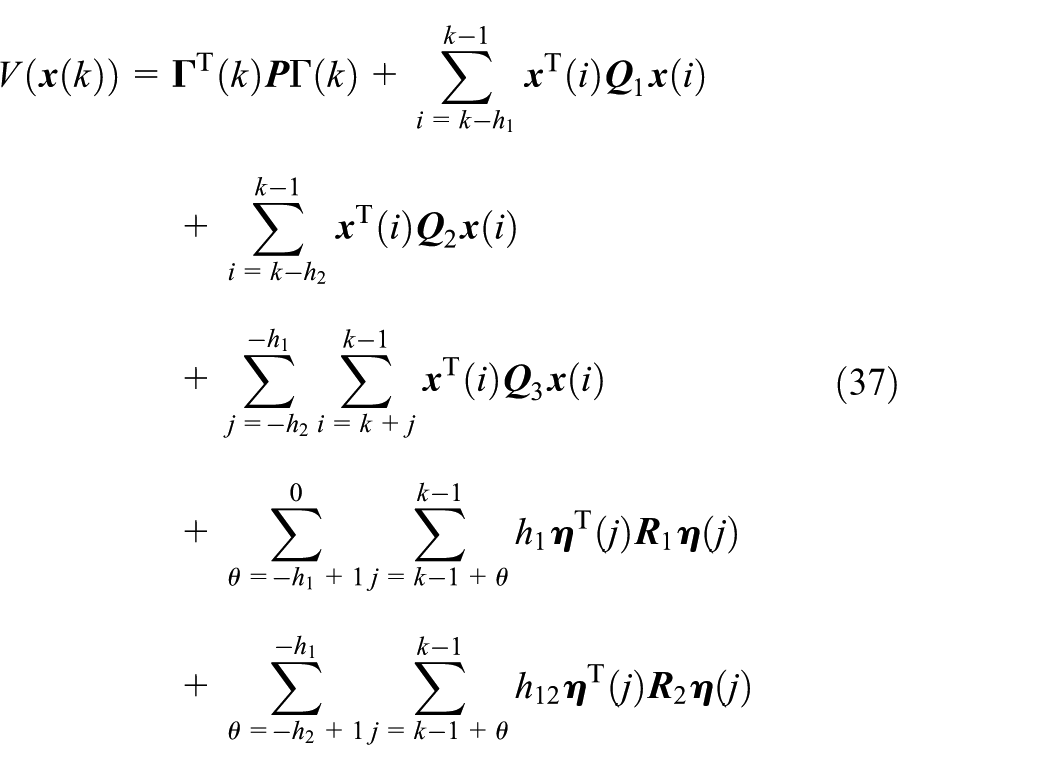
where


Taking the forward difference of the Lyapunov functional V(
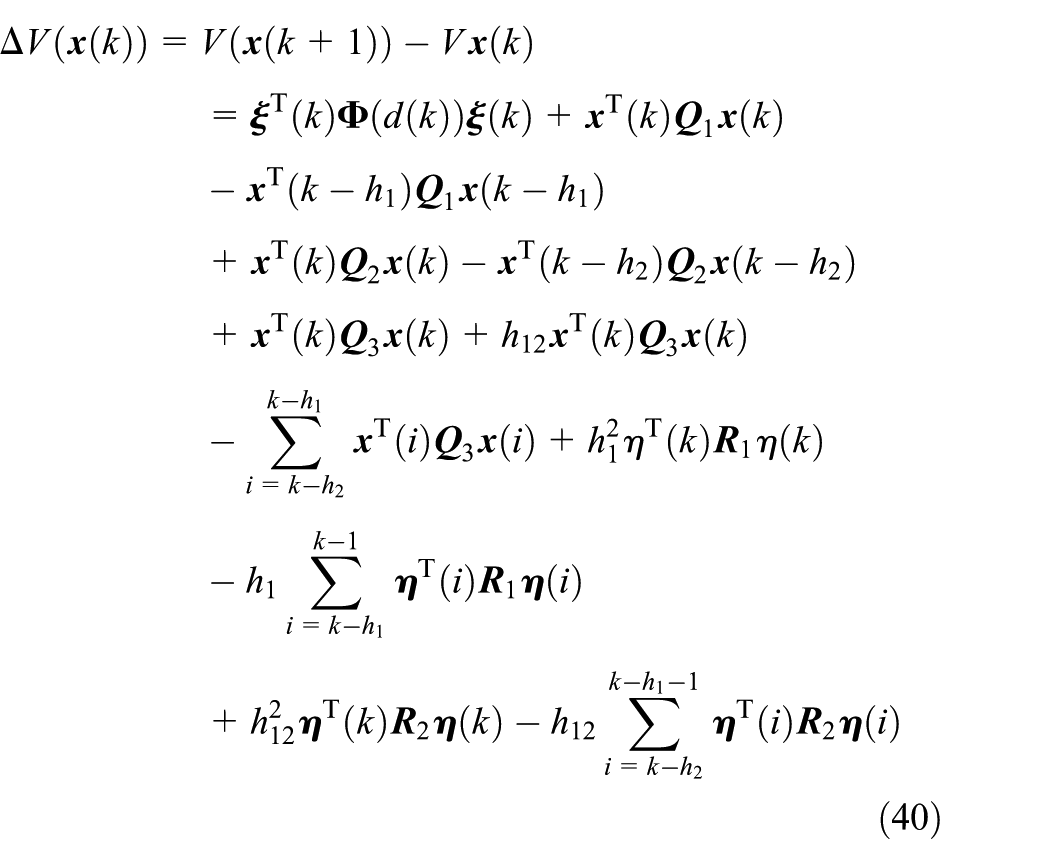
where

and
Note that

Next, by employing Lemma 1, that is, the discrete version of the Wirtinger-based inequality, the 10th and the last terms of (40) are bounded by (5) and are as follows:
The reciprocal convexity method of Lemma 2 ensures that if there exists a matrix
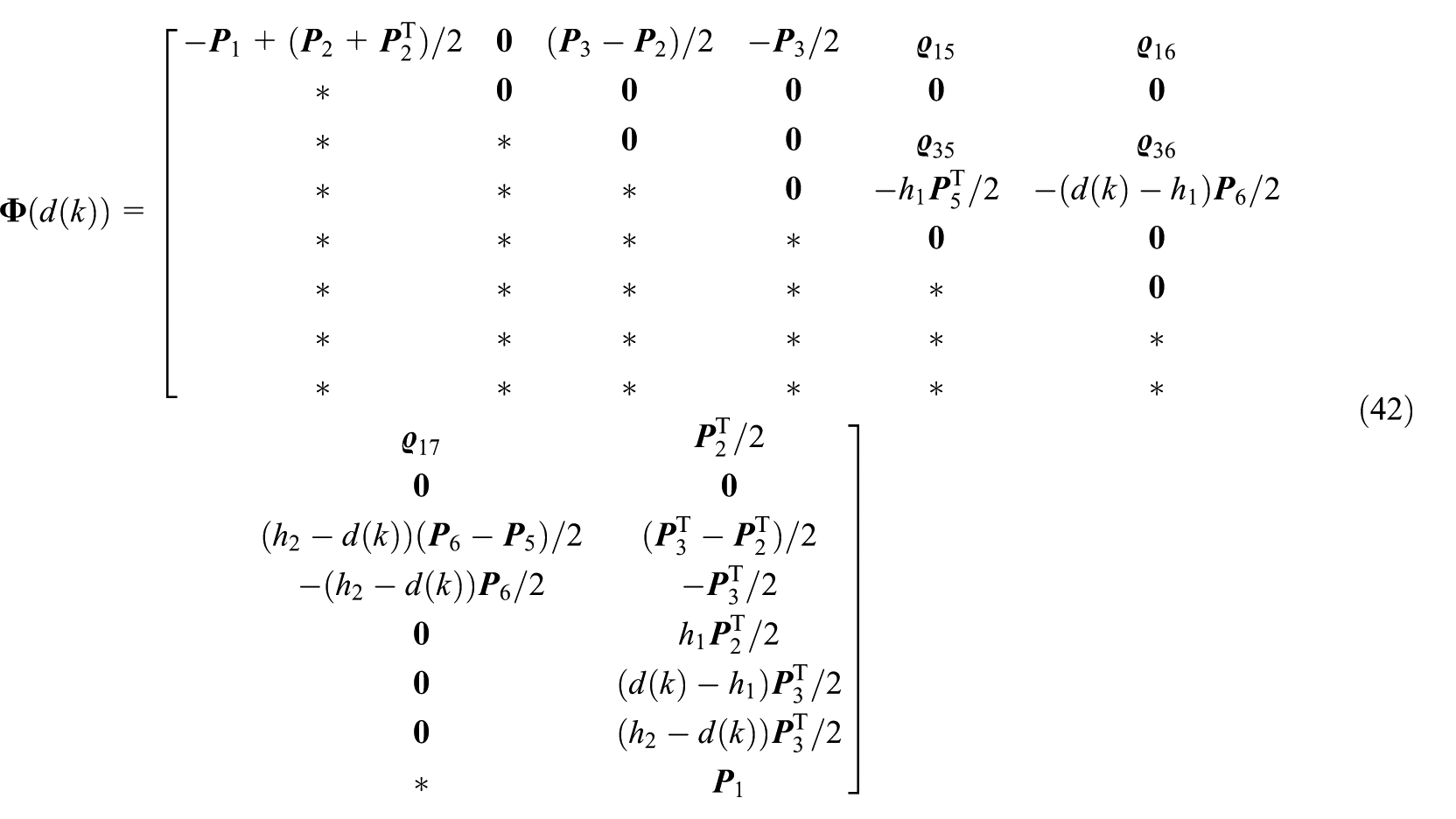
Employing (40) to (44) and (46), we have the following inequality

where
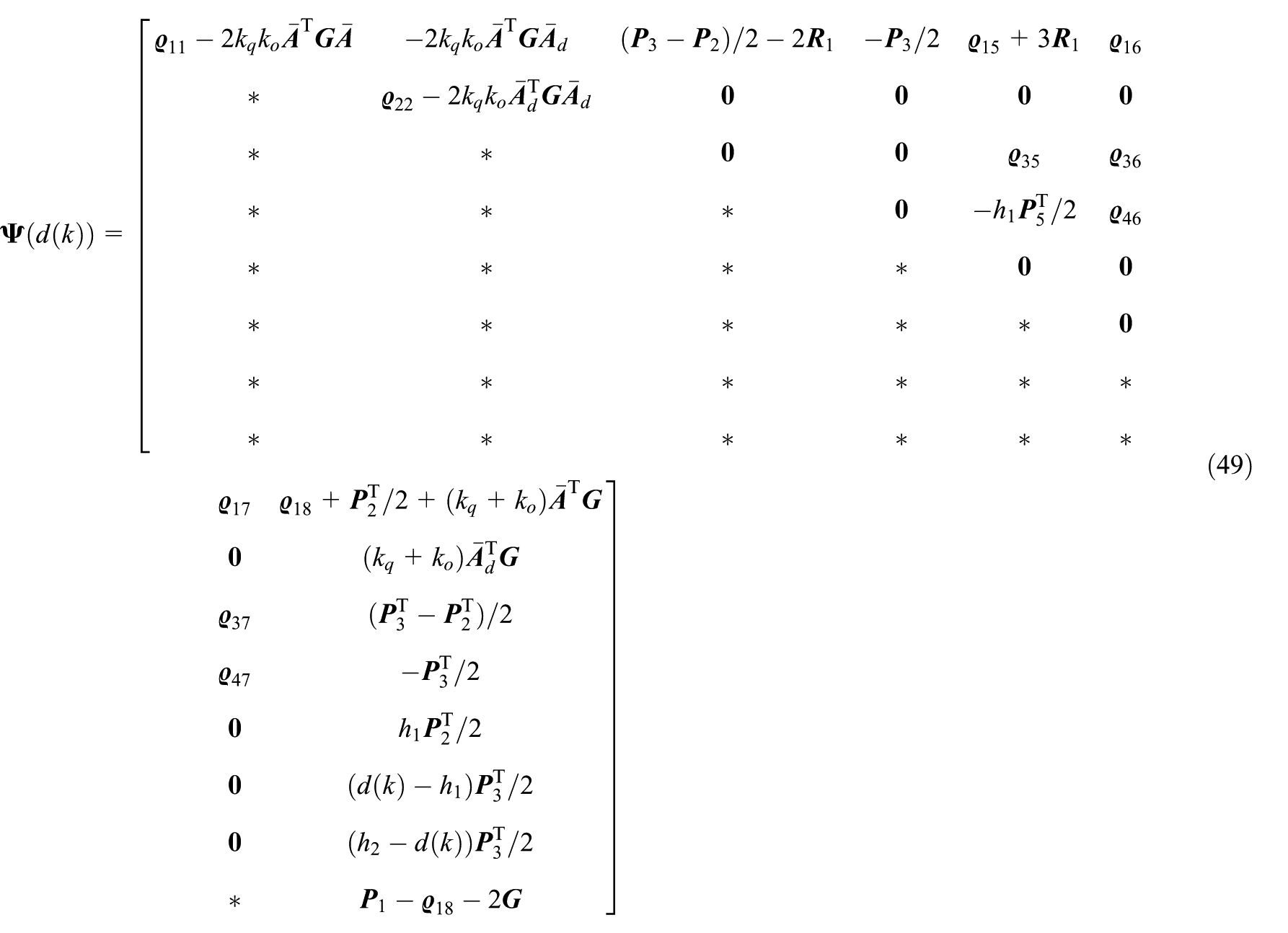

In view of (13), (48) is non-negative. From (47) and (48) it follows that ΔV (
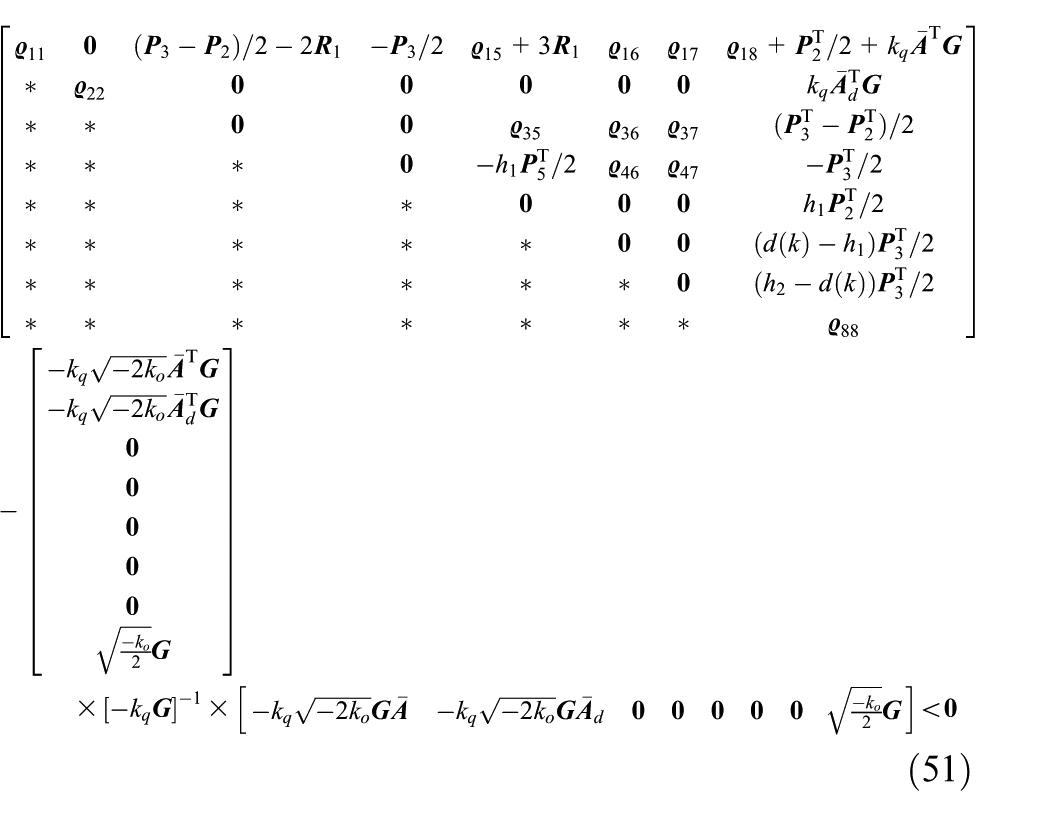
Using the well-known Schur’s complement, (51) is equivalent to

Further, using (3a), the condition (52) can be rewritten as

where


and
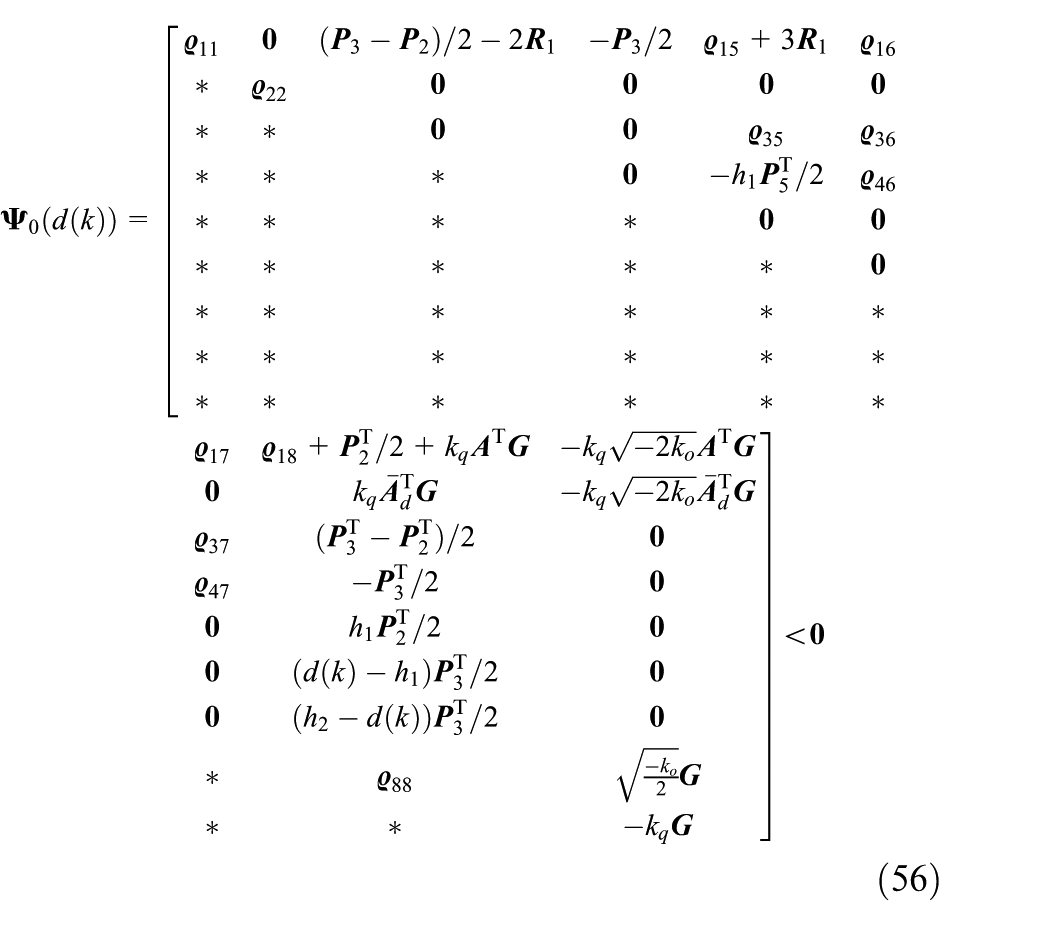
By Lemma 3, (53) to (56) is equivalent to

where
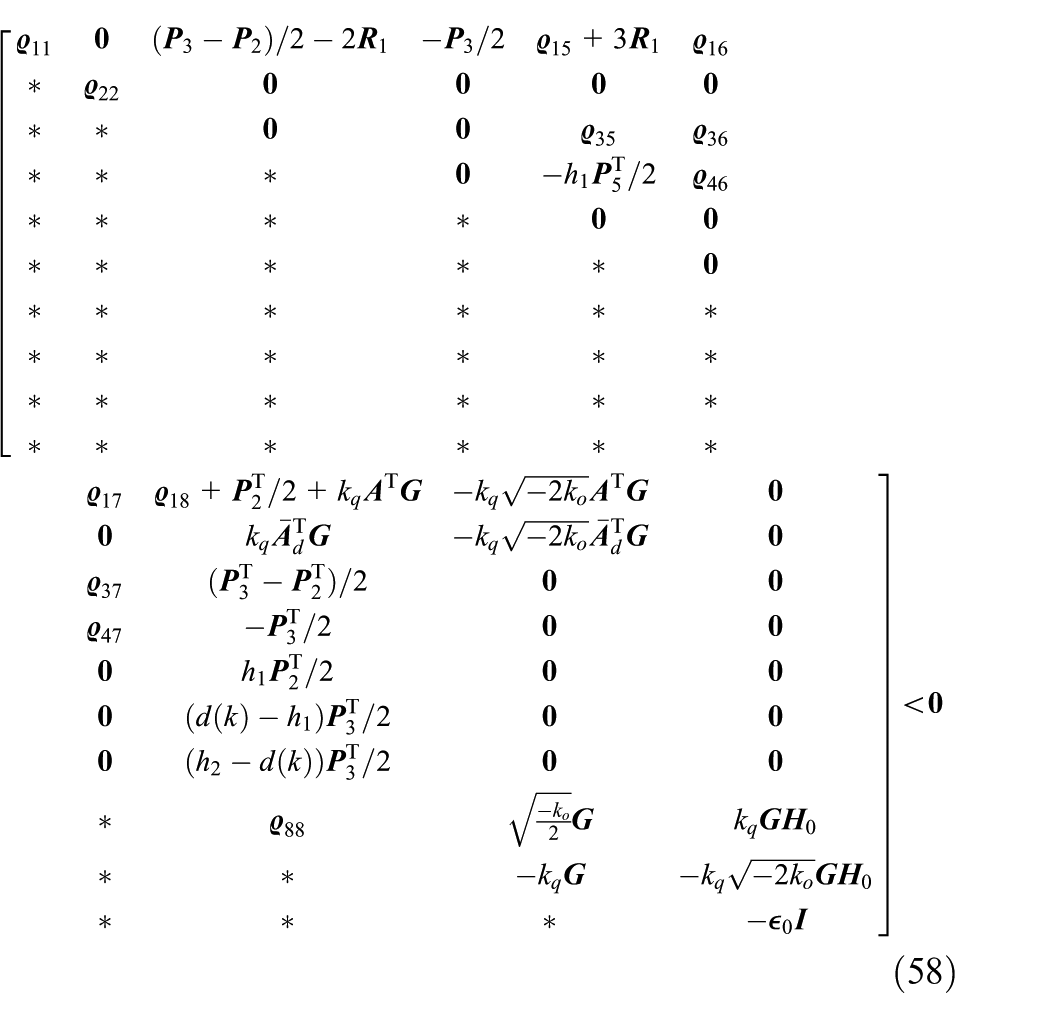
Following steps similar to (53) to (58), it is easy to show that (58) is equivalent to the condition
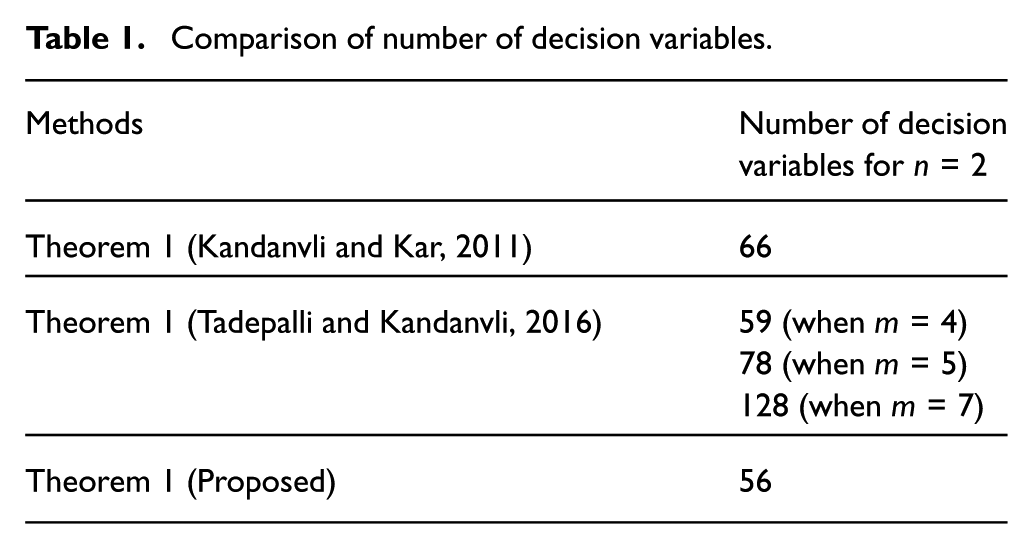
Comparison of number of decision variables.
Upper delay bound h2 for various h1 for the system described in Example 1.

In general, the efficiency of a particular criterion depends on how much improvement, in terms of conservativeness and number of decision variables, it will provide. Given this, and from Tables 1 and 2, it is clear that Theorem 1 may provide better results than Theorem 1 (Kandanvli and Kar, 2011) and Theorem 1 (Tadepalli and Kandanvli, 2016).
Discrete-time systems in the presence of saturation nonlinearities
Pertaining to the situation where the system (1) to (3) involves saturation overflow nonlinearities

we have the following result.


and positive scalars

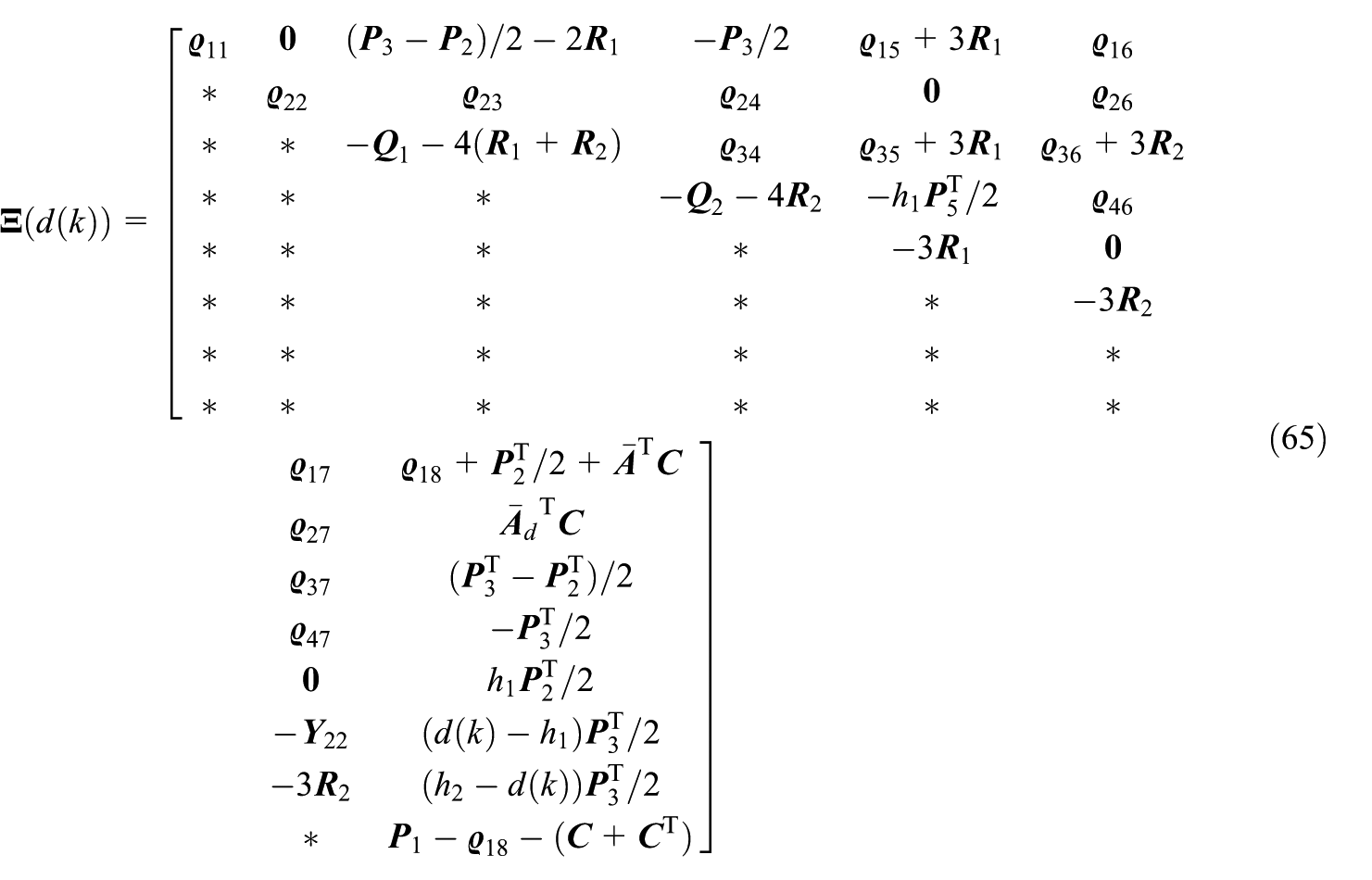
where
and




where

Observe that, for the saturation nonlinearities given by (59) along with (62c), the quantity δ (see (64)) is non-negative (Kandanvli and Kar, 2013; Kar, 2007; Singh, 1990; Tadepalli and Kandanvli, 2016).
From (63), it is clear that ΔV(
Next, by following the approach presented in the proof of Theorem 1, the condition
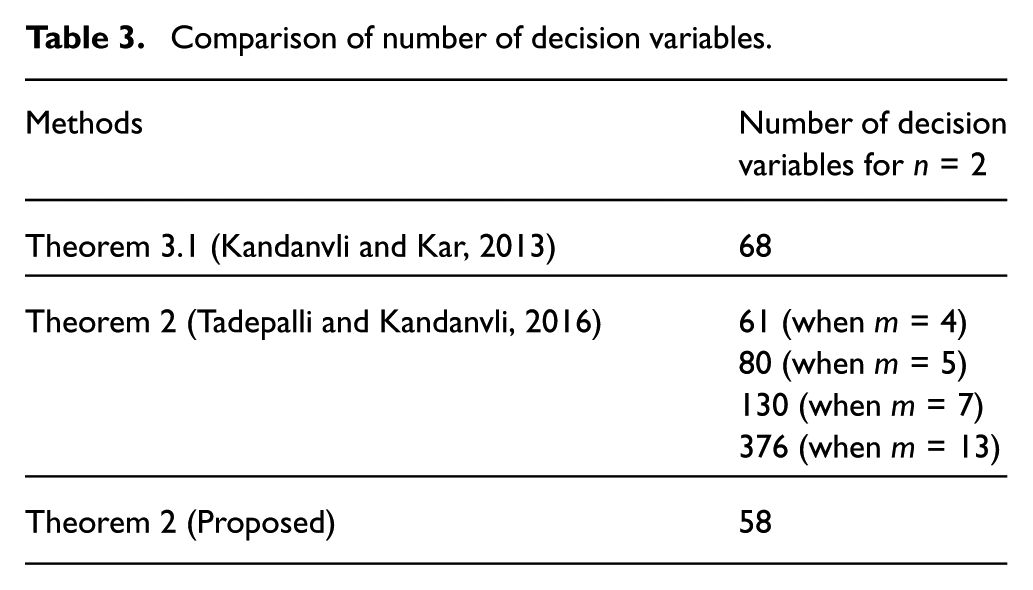
Comparison of number of decision variables.
Upper delay bound h2 for various h1 for the system described in Example 2.


which satisfies the following sector-bounded condition

Note that by choosing

The nonlinear description in (66b) is more general and includes the usual Lipschitz conditions as a special case. On the other hand, for the case where the system (1)–(3) is under the influence of only saturation overflow nonlinearities, the function

which is identical to the discrete Jensen inequality (Jiang et al., 2005). Hence, it may be concluded that Lemma 1 is less conservative than the discrete Jensen inequality (Jiang et al., 2005) since a positive term is added to the right-hand side of the inequality of Lemma 1.
Examples
In this section, we will give examples to show the significance of the presented results.


and the nonlinearities belonging to the sector [ko, kq] = [0, 1], which includes saturation, zeroing, magnitude truncation, a combination of saturation and magnitude truncation, a combination of zeroing and magnitude truncation, and so on. This example has been considered in Kandanvli and Kar (2011, 2013) and Tadepalli and Kandanvli (2016). Now, using the SeDuMi 1.21 solver (Sturm, 1999) and the YALMIP 3.0 parser (Löfberg, 2004), our objective is to obtain an upper delay bound h2 for a given lower delay bound h1 by iteratively solving the linear matrix inequalities with respect to h2. The various values of h2 obtained are summarized in Table 2. From Tables 1 and 2, one can observe that Theorem 1 yields less conservative results along with a reduced computational burden compared to Theorem 1 in Kandanvli and Kar (2011) and Theorem 1 in Tadepalli and Kandanvli (2016).
By choosing an arbitrary initial condition, a plot of the state trajectories of the present system with
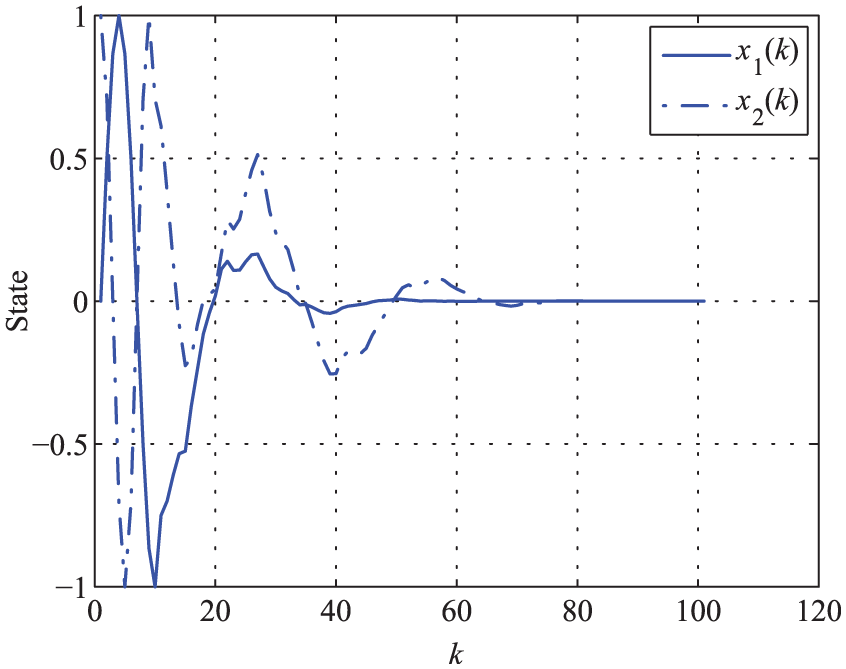
State response of the system in Example 1.
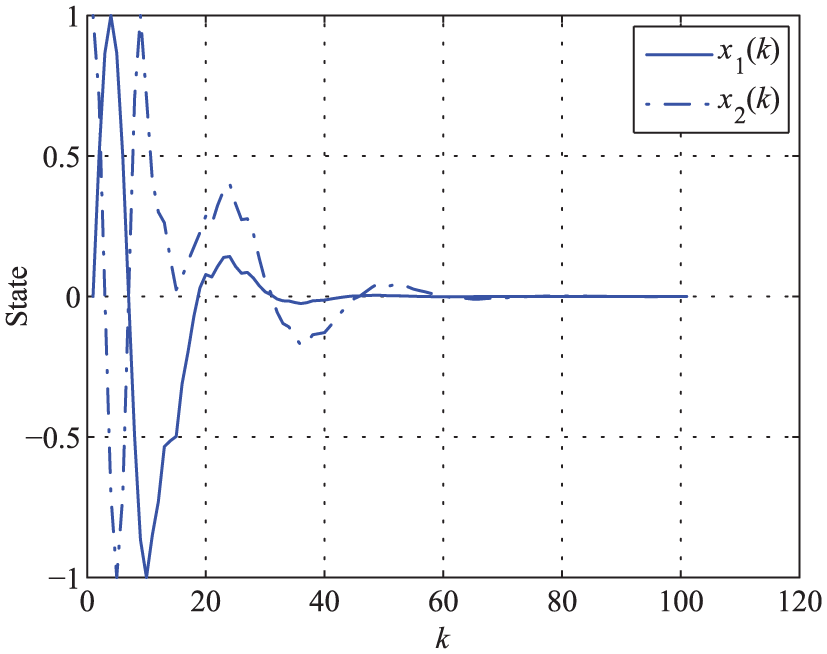
State response of the system in Example 2.
Summarizing the above, the criteria presented in this paper may provide better stability conditions (i.e. less conservative and computationally less demanding) which are outside the scope of previously reported criteria. In other words, in the design of a class of uncertain discrete-time systems employing finite wordlength nonlinearities and time-varying delays, the present criteria could help to obtain a larger stability region than that obtainable via previously reported criteria. This is important, since for efficient design it is necessary to have as large a stability region as possible.
Conclusion
In this paper, with the help of a discrete version of the Wirtinger-based inequality and a reciprocally convex approach, two delay-dependent stability criteria for a class of uncertain discrete-time systems with time-varying delays and finite wordlength nonlinearities have been presented. Relative to previous criteria, the presented approach involves fewer decision variables and, hence, the computational burden has reduced greatly. From the examples it has also been shown that the presented results are less conservative than the previous ones.
Footnotes
Acknowledgements
The authors wish to thank the anonymous reviewers and the Associate Editor for their constructive comments and suggestions.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.