
Abstract
The objectives of the paper are (i) to develop a new 4-D conservative chaotic system with hidden chaotic orbits, (ii) to design a second order adaptive time varying sliding mode control for the synchronization between two identical proposed chaotic systems in the presence of matched disturbances and (iii) to compare the performances of the proposed controller with two available controllers which have been published recently. The chaotic nature of the proposed system is validated using theoretical and numerical tools like divergence property, Lyapunov exponents, Lyapunov spectrum, bifurcation diagram, phase portrait, Poincaré map and a frequency spectrum. The new conservative chaotic system exhibits the coexistence of hidden chaotic orbits with no equilibrium point. The new system is synchronized with itself using the proposed second-order adaptive time varying sliding mode control technique in the presence of matched disturbances and by considering different initial conditions. During synchronization, the parameters of both the systems, gains of the first order and second order sliding surfaces and the gains of the switching laws are considered as unknown and estimated adaptively. Only two control inputs are used to synchronize all the four states of the system. The effectiveness of the proposed controller is compared with two available controllers for the synchronization of chaotic systems and it is found that the proposed controller performs much better than the two available controllers.
Keywords
Introduction
Most of the reported chaotic systems like the systems in the work by Jafari et al. (2017); Kuznetsov et al. (2014) and Wei et al. (2014) and the conventional systems in the work by Lorenz (1963), Lu et al. (2002) and Rossler (1976), etc. have a dissipative nature. Very few chaotic systems which have a conservative nature have been reported. The works by Sprott (2010), and Henon and Heiles (1964) are considered as the first examples of conservative chaos. In the past decade, some more but limited numbers of chaotic systems with conservative nature have been reported (Cang et al., 2017; Vaidyanathan, 2015a; Vaidyanathan and Pakiriswamy, 2015c; Vaidyanathan and Volos, 2015d). In the case of a conservative chaotic system, the energy of the dynamical system remains constant. Thus, developing a conservative chaotic system with unique properties is an attractive research direction. A system is tested to be conservative if its sum of Lyapunov exponents (LEs) and divergence of the vector field equals zero and the Lyapunov dimension is equal to the order of the system (Jafari et al., 2015, 2016; Lakshmanan et al., 2003; Sprott, 2014).
An equilibrium point plays an important role in the classification of dynamical systems. Based on the nature of equilibrium points, all reported chaotic/hyperchaotic systems are categorized into two classes (Leonov et al., 2011a,b). These are:
self-excited attractors chaotic systems;
hidden attractors chaotic systems.
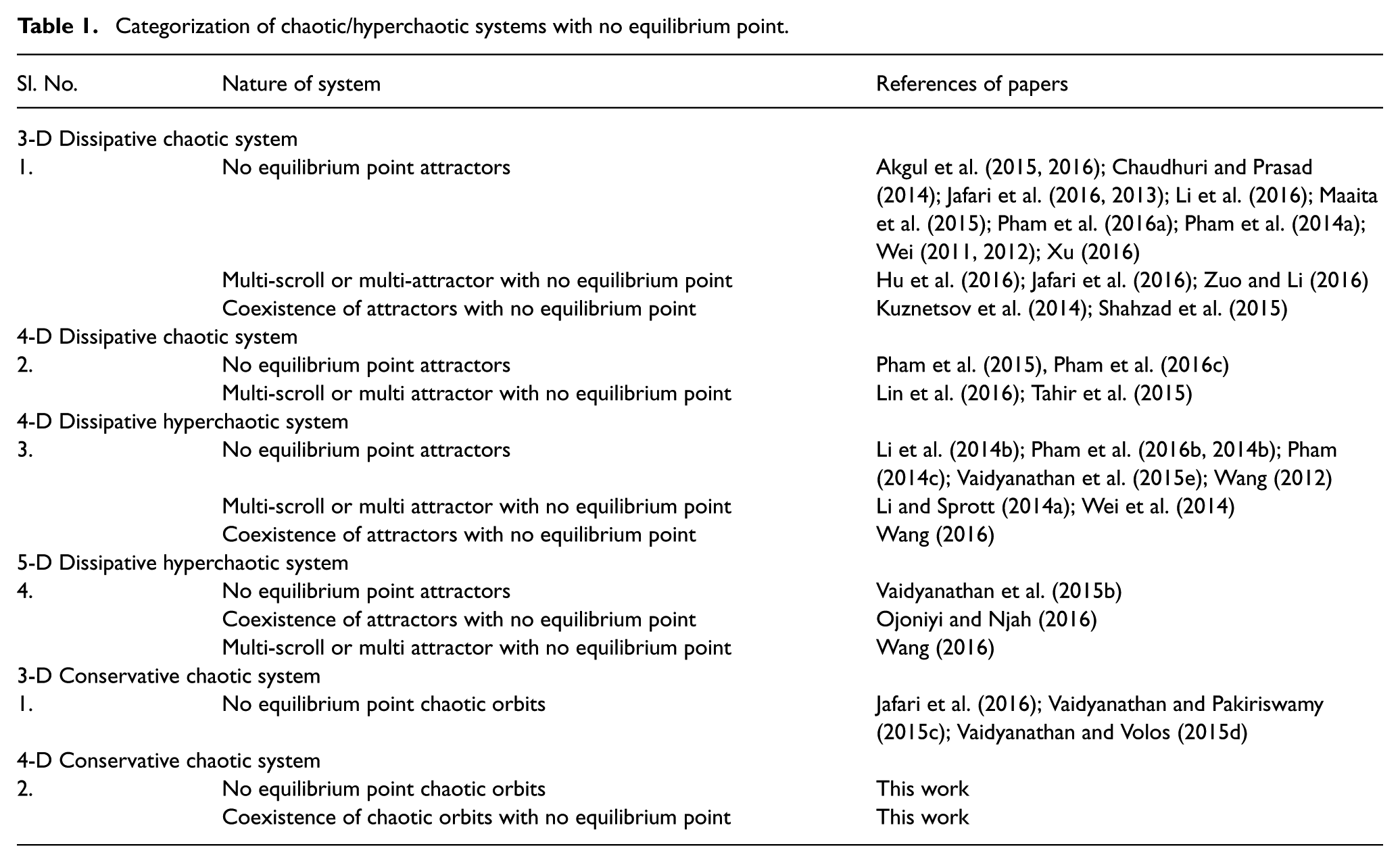
In the case of a hidden attractor dynamical system, its basin of attraction does not intersect with any small open neighbourhood of equilibrium point of the system (Dudkowski et al., 2016). However, in the case of a self-excited attractor dynamical system, its basin of attraction is connected with its equilibrium point. Thus, development of a hidden attractor chaotic system is more difficult compared with that of a self-excited attractor chaotic system, because the location of an equilibrium point of a hidden attractor chaotic system does not help in generation of its attractors. Conventional systems like those presented by Lorenz (1963), Lu et al. (2002) and Rossler (1976), and some systems in the work by Singh and Roy (2016a,b) etc., are called self-excited attractors chaotic systems (Leonov et al., 2013, 2012). The systems with no equilibrium point (Jafari et al., 2013), only stable equilibrium points (Kingni et al., 2014) and many (line/plane/circle/curve/other shaped) equilibrium points (Pham et al., 2016a) are called hidden attractor chaotic systems. Recently many chaotic/hyperchaotic systems with hidden attractors have been reported (Jafari et al., 2017; Kingni et al., 2017; Korneev et al., 2017; Pham et al., 2017; Singh and Roy, 2017a,b,d; Sprott et al., 2017; Tlelo-Cuautle et al., 2017). Some hidden attractor chaotic systems with no equilibrium point have also been reported recently (Escalante-Gonzalez et al., 2017; Feng and Pan, 2017; Hoang et al., 2017; Kiseleva et al., 2017; Llibre and Teixeira, 2016; Ojoniyi and Njah, 2016). Most of the reported hidden attractor chaotic systems with no equilibrium point are of a dissipative nature. Some systems can be found in the literature (Jafari et al., 2015; Politi et al., 1986; Sprott, 2014) in which autonomous system has both conservative and dissipative chaotic behaviours based on the choice of initial conditions. Very few 3-D conservative chaotic systems have been reported with no equilibrium point (Jafari et al., 2016; Vaidyanathan and Pakiriswamy, 2015c; Vaidyanathan and Volos, 2015d). Higher dimensional systems have more complexity and disorderedness compared with lower dimensional systems (Shen, 2014a,b). Thus, developing a higher dimensional (4-D) conservative chaotic system with no equilibrium point is a worthy motivation for the present work. The reported chaotic systems with no equilibrium points are listed in Table 1. It is apparent from Table 1 that most of the reported systems with no equilibrium point belong to the dissipative chaotic system family and a few 3-D chaotic systems are from the conservative chaotic system family. However, a conservative 4-D chaotic system with no equilibrium point is rare in the literature. Thus, this paper attempts to develop a new 4-D conservative chaotic system with no equilibrium point.
Categorization of chaotic/hyperchaotic systems with no equilibrium point.
Multistability in a chaotic system is defined as the coexistence of various possible steady states /attractors of the system (Pisarchik, 2014; Sharma et al., 2015). The generation of multistability (i.e. coexistence of attractors) is mainly governed by the choice of initial conditions. The response of a system changes with the change of initial conditions. Multistability is seen in several areas like in an electronic circuit, a laser system, a chaotic or hyperchaotic system, etc. (Pisarchik, 2014; Sharma et al., 2015). The existence of multistability in a dynamical system may cause the occurrence of unexpected responses. Thus, finding multistability with hidden attractors in a higher dimensional conservative chaotic system is another motivation of this paper.
Synchronization of chaotic/hyperchaotic systems is an important research direction in the field of chaos theory (Pecora and Carroll, 2015). Many control techniques are reported for the synchronization of chaotic/hyperchaotic systems like state feedback control (Loria, 2010), backstepping control (Yassen, 2006), optimal control (Saberi, 2014), nonlinear active control (Singh et al., 2014, 2017c), adaptive control (Handa and Sharma, 2016), sliding mode control (SMC) (Mobayen et al., 2016), impulsive control (Yang, 2012), adaptive backstepping (Ge et al., 2000), fuzzy logic control (Hendel et al., 2015), a neural network (NN) (Hendel et al., 2015), etc. Among the aforementioned control techniques, SMC is more used because of its ease in design, robustness to uncertainties and insensitivity to disturbances (Khalil, 2002).
Various variants of SMC are used along with other control techniques for the synchronization and control of dynamical systems like adaptive SMC (Chi-Ching, 2012), backstepping SMC (Min, 2016), fuzzy-SMC (Min, 2016), Linear matrix inequality based sliding mode control (LMI SMC) (Mobayen et al., 2016), etc. The conventional first-order SMC has some disadvantages like chattering, high gain and asymptotic stability (Mobayen et al., 2016). However, in the first-order SMC, the chattering can be minimized by using a saturation function in place of a signum function, but the tracking precision and disturbance rejection properties are degraded. The integral SMC can overcome the requirement of high gain (Singh et al., 2015). The chattering phenomena can be overcome or eliminated by using higher order SMC or other SMC techniques (Mobayen et al., 2016). Terminal sliding surfaces are designed to achieve finite-time stability (Chi-Ching, 2012). Many techniques are available to minimize or eliminate chattering, like quasi-SMC, low-pass filters, fuzzy-SMC and higher order SMC (HOSMC) (Fridman et al., 2011). However, some of these techniques degrade the robustness and performances of the controller. Among these, HOSMC or second-order SMC (SO-SMC) are considered as the best. In SO-SMC, chattering is eliminated because the actual control used is the continuous integration of its derivative.
The SO-SMC technique is used in many fields for the control of dynamical systems (Castaneda et al., 2015; Dehkordi et al., 2017; Ding and Li, 2016; Munoz et al., 2017; Pukdeboon, 2016). Some works are reported on the use of a second order SMC for the synchronization and control of chaotic/hyperchaotic systems (Behjameh et al., 2015; Datcu et al., 2012; Hendel et al., 2015; Hsu et al., 2017; Lu et al., 2012; Mobayen et al., 2016; Rodriguez et al., 2009; Xiang and Chen, 2011, 2010; Zhankui and Sun, 2013). The gains of the sliding surfaces in the work by Behjameh et al. (2015); Datcu et al. (2012); Hendel et al. (2015); Hsu et al. (2017); Lu et al. (2012); Rodriguez et al. (2009); Xiang and Chen (2011, 2010) and Zhankui and Sun (2013) are considered as known and their values are assumed. The gains of the sliding surfaces in the work by Mobayen et al. (2016) are determined using the LMI method. However, sometimes we do not have accurate knowledge of the gains of the sliding surfaces, switching laws, etc. Thus, there is a need to adaptively estimate the gains, parameters of the sliding surfaces and gains of the switching laws. Motivated with these findings from the literature, a second-order adaptive time varying SMC is designed for the synchronization of two chaotic systems in the presence of matched disturbances. The novelty and contributions of the paper, in comparison with the available results are as follows:
A new 4-D conservative chaotic system with no equilibrium point is proposed.
The proposed system exhibits coexistence of hidden chaotic orbits.
The sum of LEs and divergence of the vector field is equal to zero and the Lyapunov dimension is equal to the order of the system. Thus, this confirms the conservative nature of the new chaotic system (Jafari et al., 2015; Lakshmanan et al., 2003; Sprott, 2014).
A second-order adaptive time varying SMC is proposed for synchronization between two chaotic systems in the presence of matched disturbances.
During synchronization, the gains of the first- and second-order sliding surfaces, the parameters of the systems and the gains of switching laws are estimated on-line.
The performances of the proposed controller and the controllers in the work by Lu et al., (2012) and (Mobayen et al., 2016) are compared and it is found that the proposed controller performs much better than the other two.
In 2011, Sprott (2011) reported three standard criteria to be considered for the publication of a new dynamical hyperchaotic/chaotic system. The new system should satisfy at least one of those three criteria (Sprott, 2011). One criterion among these three is that the new system should exhibit some novel behaviour. The new system proposed in this paper satisfies this criterion.
The rest of the paper is organized as follows. The ‘Dynamics of a new 4-D conservative chaotic system with no equilibria’ section explains the dynamics and development of the new 4-D chaotic system. Basic dynamical properties of the new system are discussed in the ‘Basic dynamical property of the new system’ section. The ‘Validation of chaotic behaviour of the new system using numerical simulation’ section describes the chaotic behaviour of the proposed system using numerical techniques. An adaptive second order time varying SMC is proposed in the ‘Synchronization between two identical new 4-D chaotic systems in the presence of matched disturbances’ section for synchronization between the proposed chaotic systems with itself. The ‘Results and discussion’ section describes the results and discussion on the synchronization of the chaotic systems. The comparison of the proposed control technique with the two available controllers is presented in the ‘Comparison of the proposed control technique with the two available techniques’ section. The ‘Conclusions’ section represents the conclusions of the paper.
Dynamics of a new 4-D conservative chaotic system with no equilibria
Sprott (1994) reported a Sprott type-A conservative chaotic system whose dynamics is described as

The system given by equation (1) is chaotic with

where a and b are positive constant parameters and
Basic dynamical property of the new system
In this section, the basic properties of the system given by equation (2) are presented. The equilibrium points are obtained by equating the derivative of each state variable of equation (2) to zero and we can find that there is no particular solution that exists for the system given by equation (2). Thus, the system given by equation (2) has no equilibrium point.
The system given by equation (2) is invariant under the change of coordinates

Now suppose

Thus, the volume of the system given by equation (2) will converge if the average value of
Average of the
Validation of chaotic behaviour of the new system using numerical simulation
In this section, the chaotic behaviour of the system given by equation (2) is validated using various numerical tools like Lyapunov exponents (LEs), a Poincaré map, a phase portrait, a frequency spectrum and a bifurcation diagram.
The LEs of the system given by equation (2) with

Since the Lyapunov dimension of the system given by equation (2) is equal to the order of the system and the sum of LEs is zero, thus, the system given by equation (2) is a conservative chaotic system.
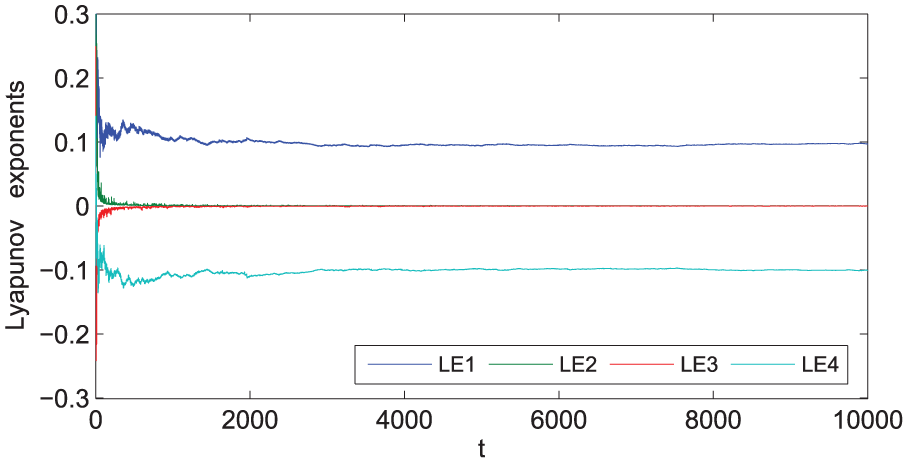
LEs of the system given by equation (2) with
Lyapunov spectrum and bifurcation diagram
Lyapunov spectra and bifurcation diagram are plotted to show various dynamical behaviours and to validate the conservative chaotic nature of the new system. The Lyapunov spectrum and bifurcation diagram of the system given by equation (2) with the variation of parameter a but keeping
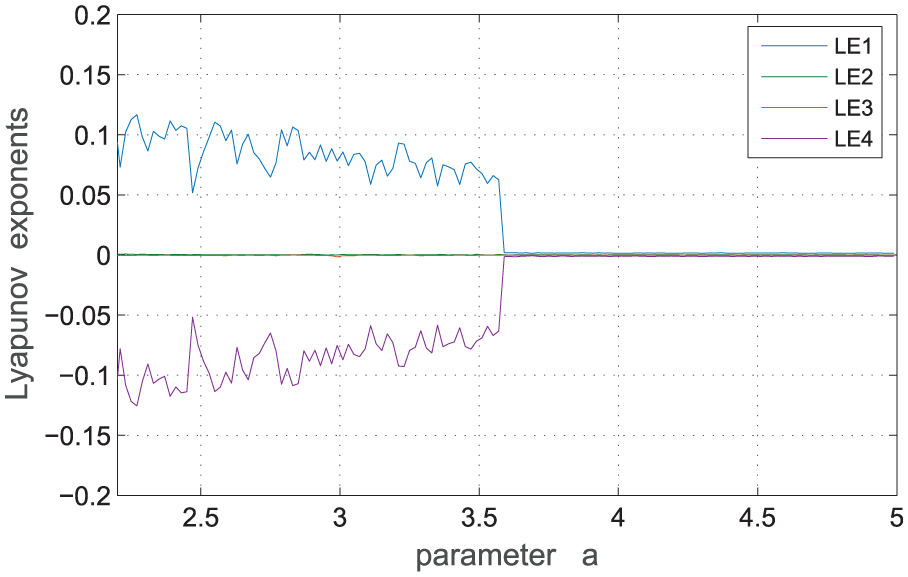
Lyapunov spectrum with variation of parameter a for the system given by equation (2) with initial conditions
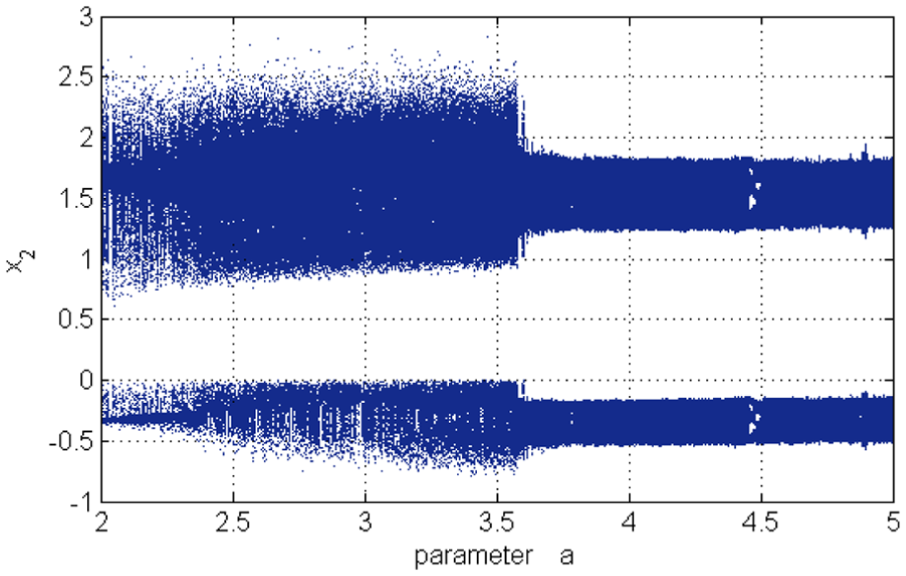
Bifurcation diagram with variation of parameter a for the system given by equation (2) with initial conditions
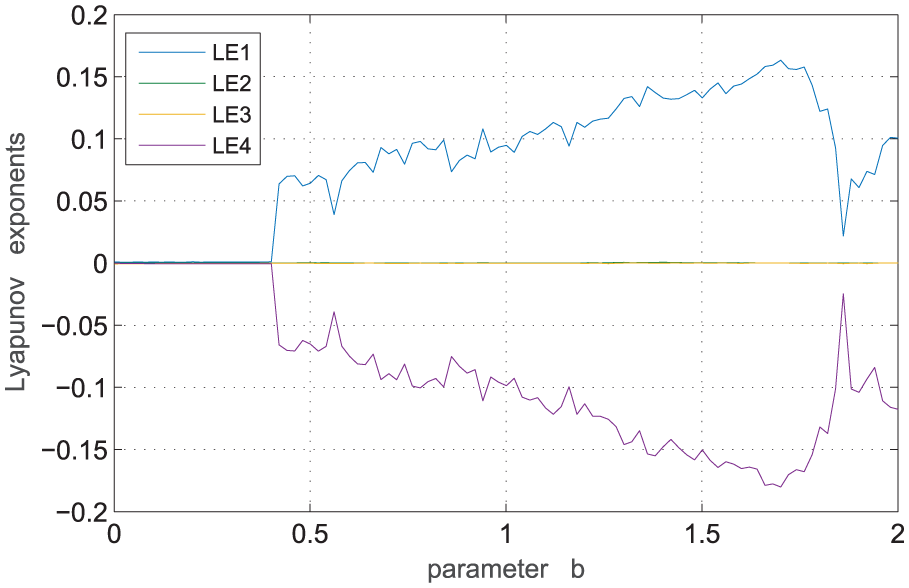
Lyapunov spectrum with variation of parameter b for the system given by equation (2) with initial conditions
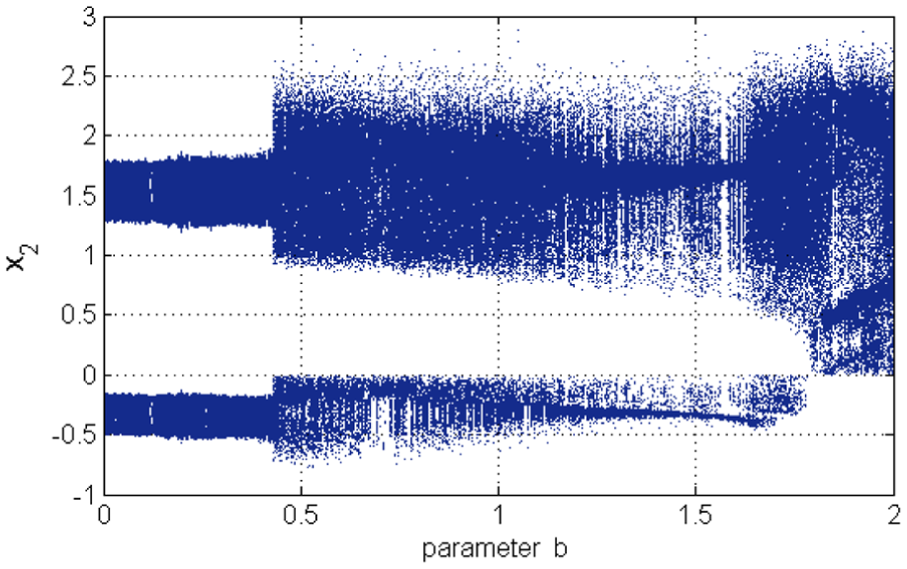
Bifurcation diagram with variation of parameter b for the system given by equation (2) with initial conditions
Chaotic orbits, Poincaré maps and frequency spectrum plots
The chaotic orbits of the system given by equation (2) with
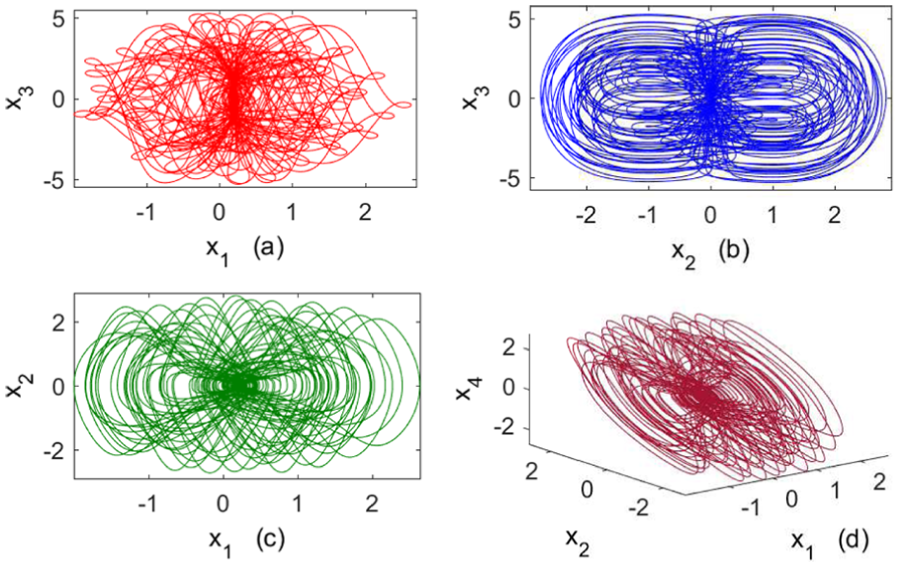
Phase portraits of the system given by equation (2) with
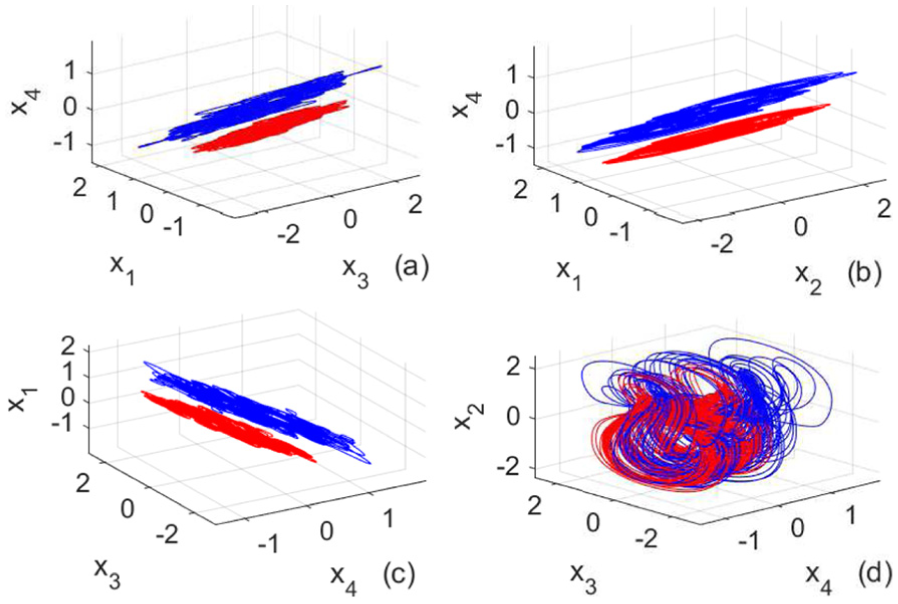
Coexistence of chaotic orbits of the system given by equation (2) with
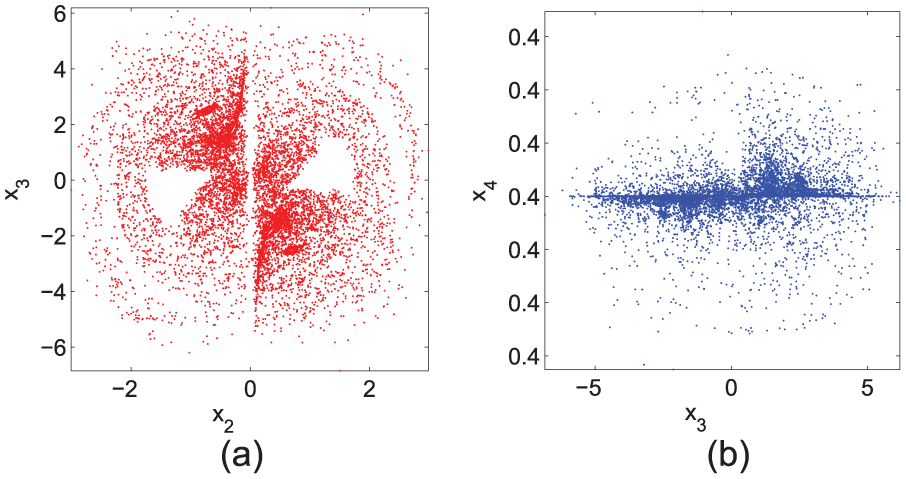
Poincaré maps of the system given by equation (2) with
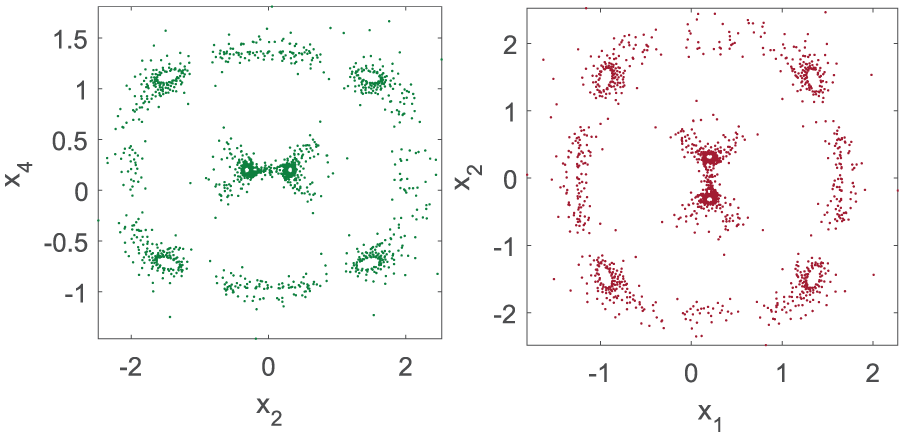
Poincaré maps of the system given by equation (2) with
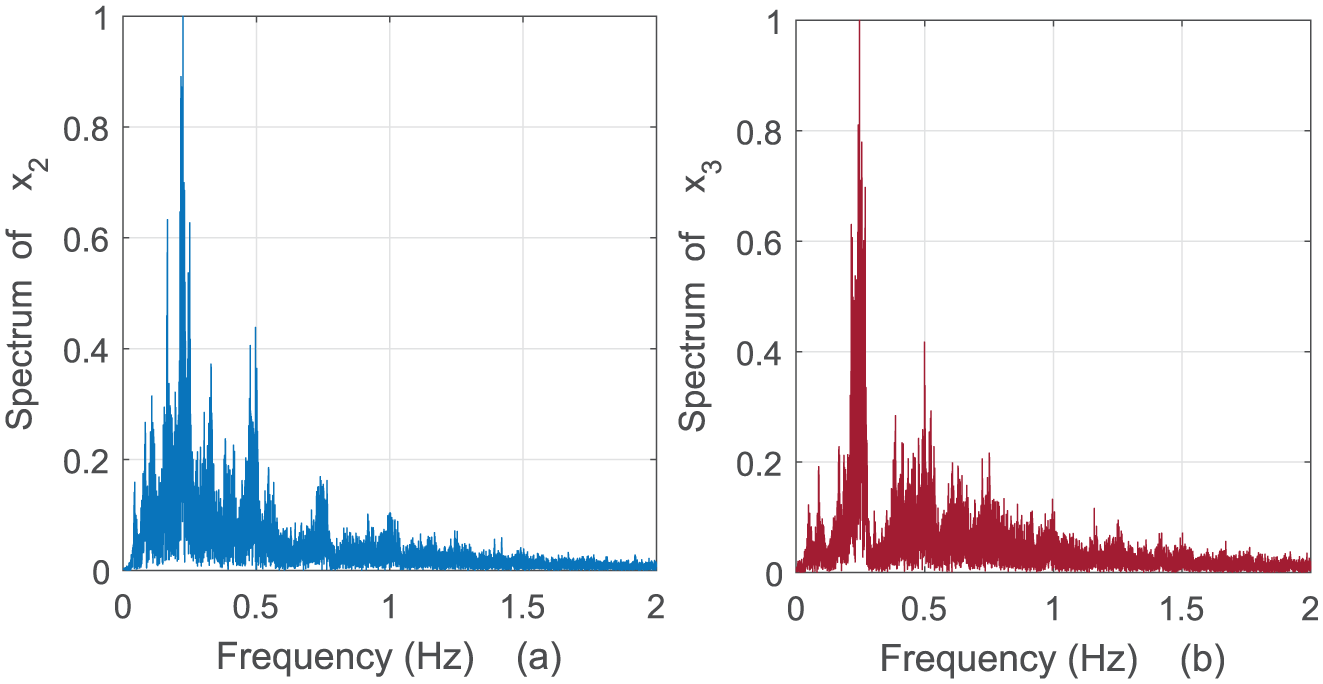
Frequency spectra of the system given by equation (2) with
Synchronization between two identical new 4-D chaotic systems in the presence of matched disturbances
In this section, the synchronization between two identical new chaotic systems in the presence of matched disturbances and parametric uncertainties is presented. Here, the system given by equation (2) is used both as the master and slave systems for the synchronization. The uncertain dynamics of the master and slave chaotic systems used for the synchronization are described in equations (5) and (6), respectively
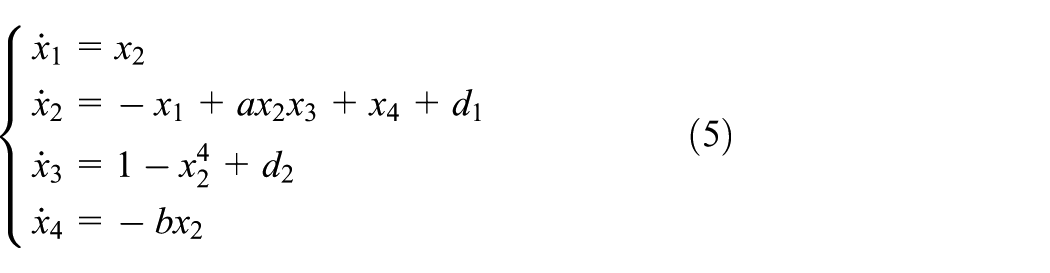
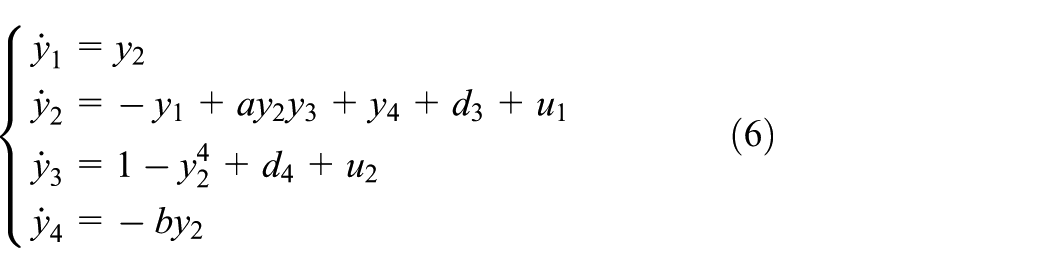
where
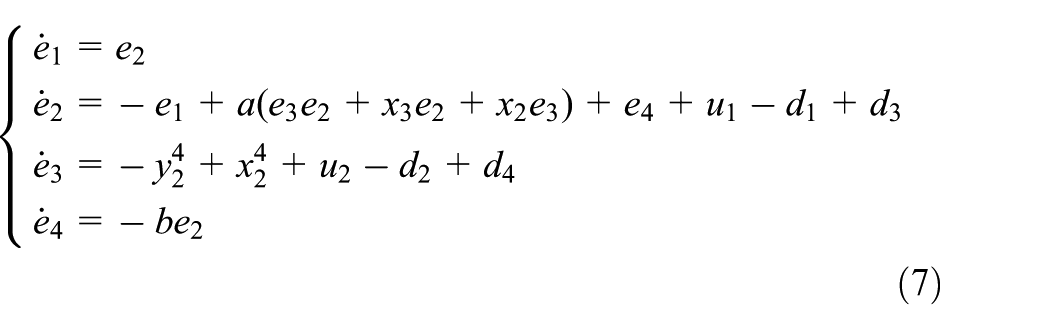
Here, the synchronization of the chaotic systems is achieved by designing a first-order SMC using error variables and a SO-SMC using the first-order SMC. The first-order sliding surfaces are designed in the structure of the proportional integral (PI) and are given as equations (8) and (9)


where
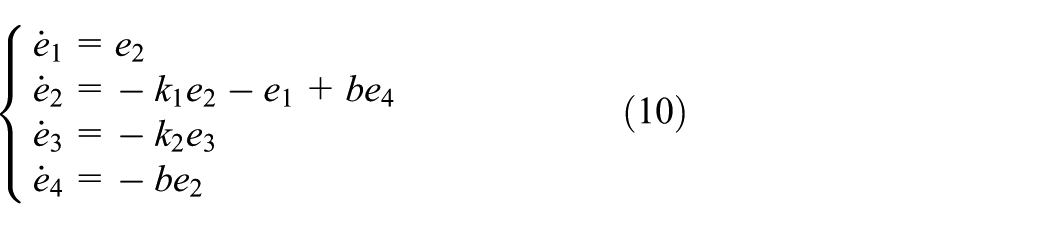
The stability of the sliding mode dynamics is ensured by considering a Lyapunov function candidate as

Now using equation (10), equation (11) can be written as

Since,
Next, the second-order sliding surfaces are designed using the above-said first-order SMC to ensure the robust synchronization in the presence of system uncertainties and disturbances. The second order sliding surfaces are described in equations (13) and (14)


where

Now suppose

Since equation (16) is a negative definite function, the sliding motions on the sliding surfaces of equations (13) and (14) are stable and ensure the convergence of first-order sliding surfaces to zero. To ensure the occurrence of the sliding surfaces and to bring the system trajectories on the sliding surfaces


where
where


The time derivative of


Consider Lyapunov candidate functions as


where


Using equations (21) to (23) along with equations (17) to (19), equations (26) and (27) can be written as


or we can write as


where
Results and discussion
In this section, the results and discussion on the synchronization between the proposed chaotic system given by equation (2) are presented. The initial conditions used for simulating the master system given by equation (5), slave system given by equation (6), control inputs given by equations (17) and (18) and the adaptive laws given by equation (19) are considered as
The disturbances


where the terms
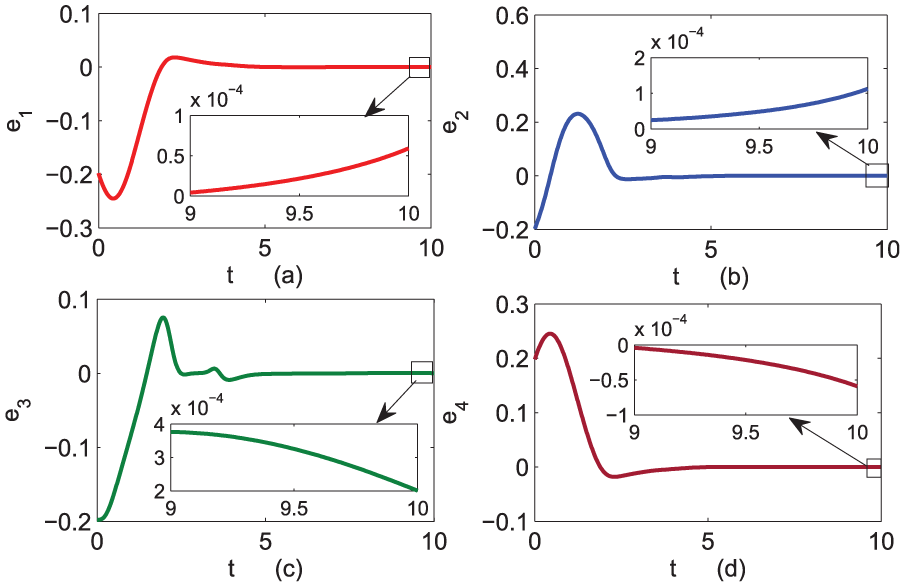
Synchronization errors between the master and slave systems.
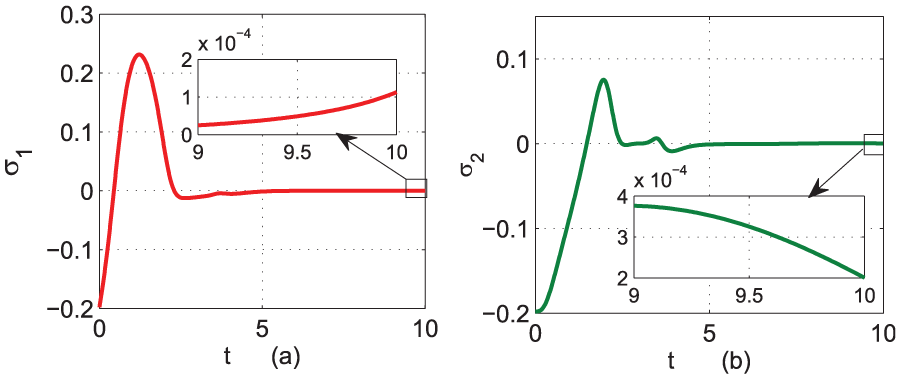
Responses of the first-order PI sliding surfaces designed for synchronization.
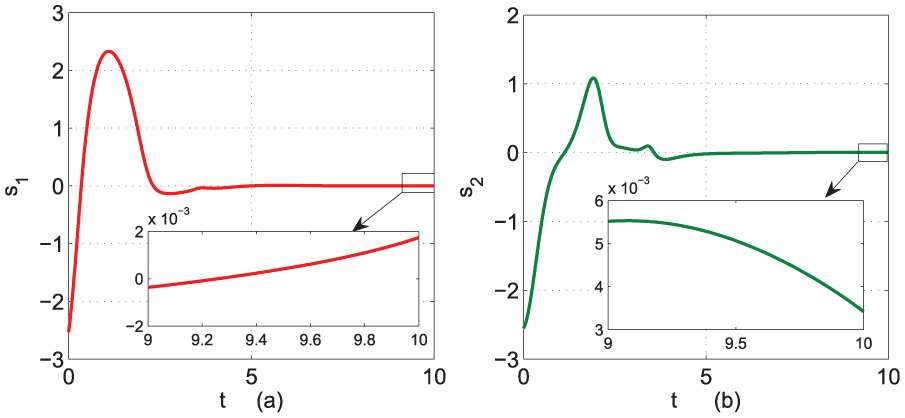
Responses of the proposed second sliding surfaces designed for synchronization.
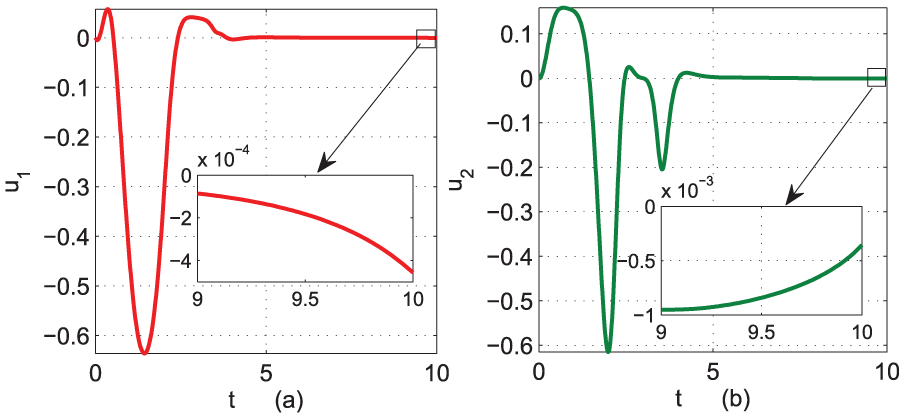
Behaviours of the control inputs during synchronization of the chaotic systems.
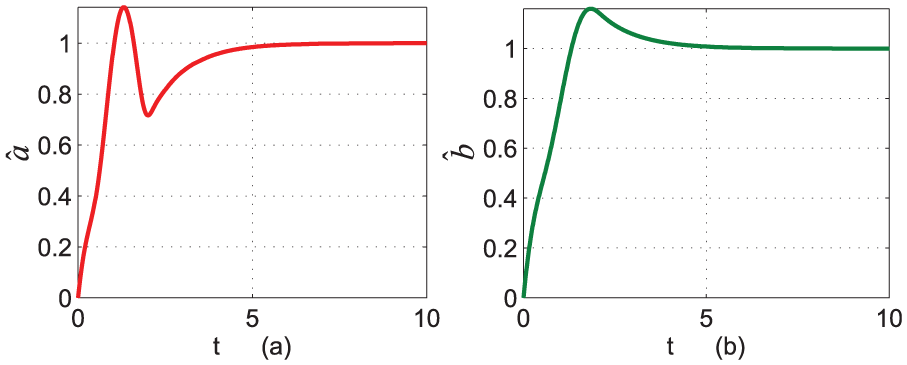
Estimation of parameters of the master and slave systems.
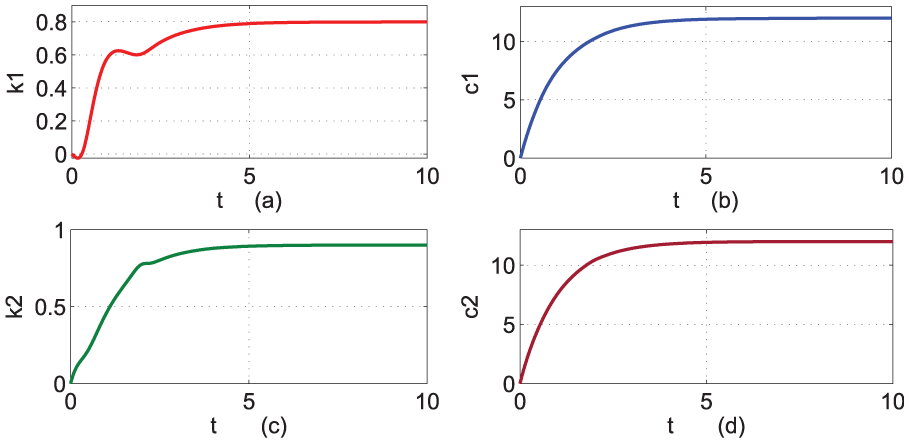
Estimation of the gains of the sliding surfaces.
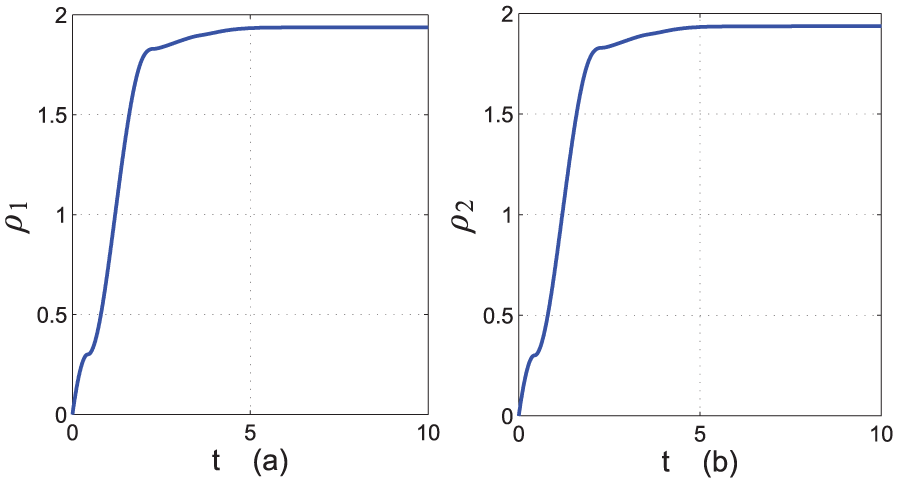
Estimation of the gains of the switching control laws of the sliding surfaces.
It is noted from Figure 12 that the synchronization errors converge to zero within
The next section compares the performances of the proposed control technique with two available controllers which are reported recently in the literature.
Comparison of the proposed control technique with the two available techniques
Comparison with the controller in the work by Lu et al. (2012)
The performances of the proposed control technique for synchronization are compared with the reported second-order SMC in the work by Lu et al. (2012). The comparison is done on the synchronization between the Van der Pol chaotic oscillator and Duffing chaotic oscillator systems. The systems considered for the synchronization are same as in the work by Lu et al. (2012). The dynamics of the master (Van der Pol oscillator) and slave (Duffing oscillator) chaotic systems are described in equations (34) and (35), respectively (Lu et al., 2012)


where
For comparison between the controllers used in the work by Lu et al. (2012) and the proposed one, the structures of the sliding surface, adaptive laws for estimating



where
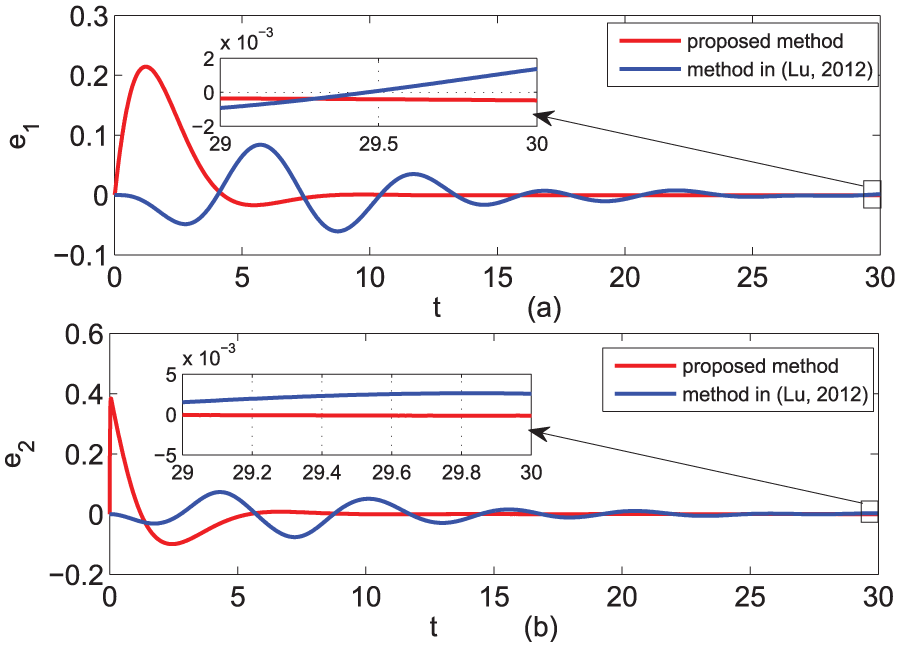
Synchronization errors between the master system given by equation (34) and the slave system given by equation (35) using the proposed control technique and the technique by Lu et al. (2012).
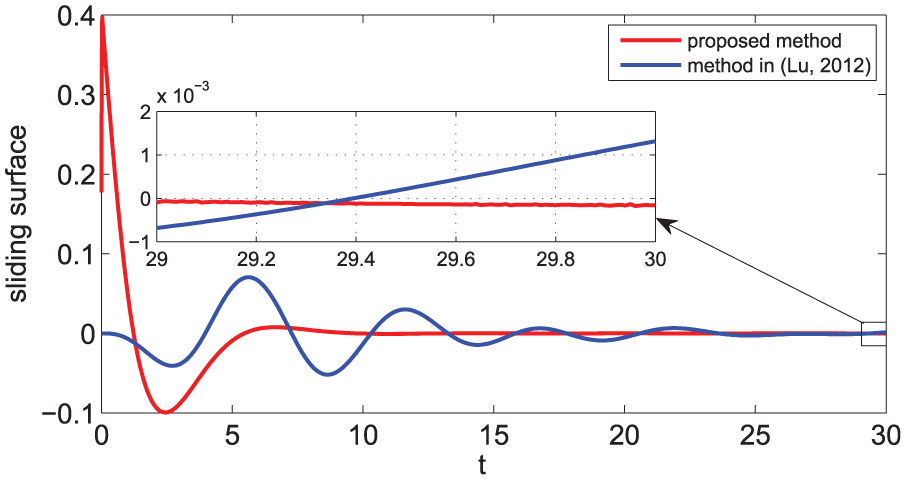
Response of the sliding surface for synchronization of equations (34) and (35) using the proposed control technique and the technique by Lu et al. (2012).
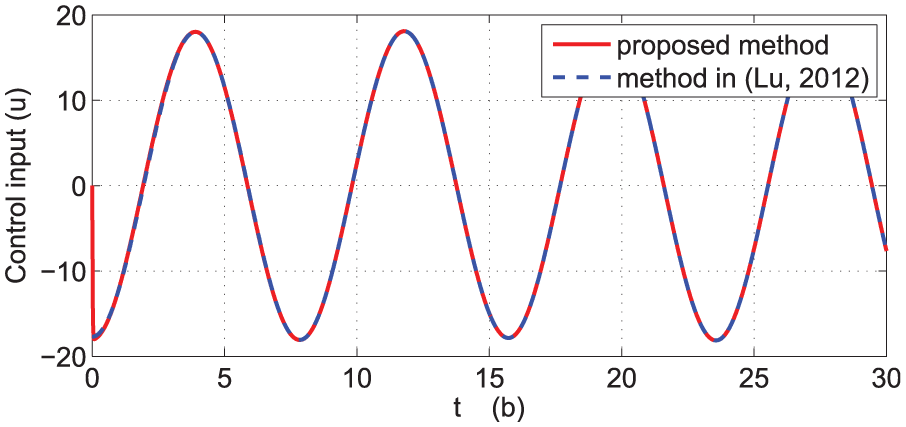
The control input for synchronization of equations (34) and (35) using the proposed control technique and the technique by Lu et al. (2012).
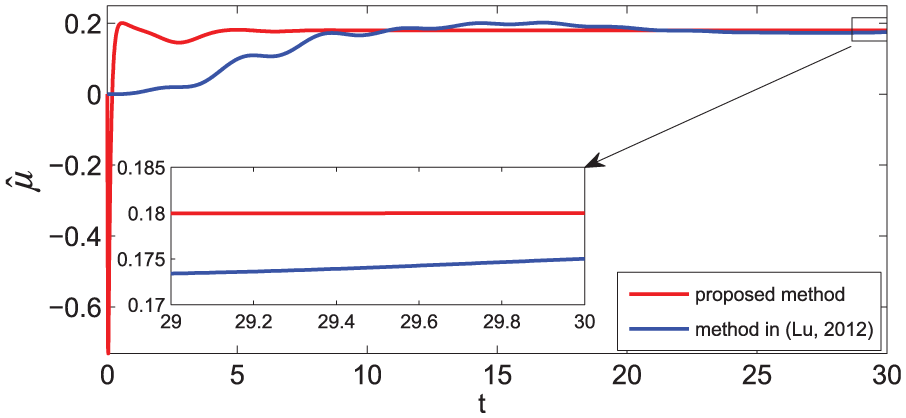
Estimation of parameter
Comparison with the controller in the work by Mobayen et al. (2016)
The performances of the proposed controller are also compared with the results by Mobayen et al. (2016). A 3-D Chua’s dynamics is used by Mobayen et al. (2016). The dynamics of the Chua’s circuit is described as (Mobayen et al., 2016)

where
The sliding surfaces, control laws and adaptation laws for the tracking control of the system are redesigned using the proposed controller and are given as equations (40) to (43)



The initial conditions for simulating Chua’s system dynamics given by equation (39), reference signals and control inputs are
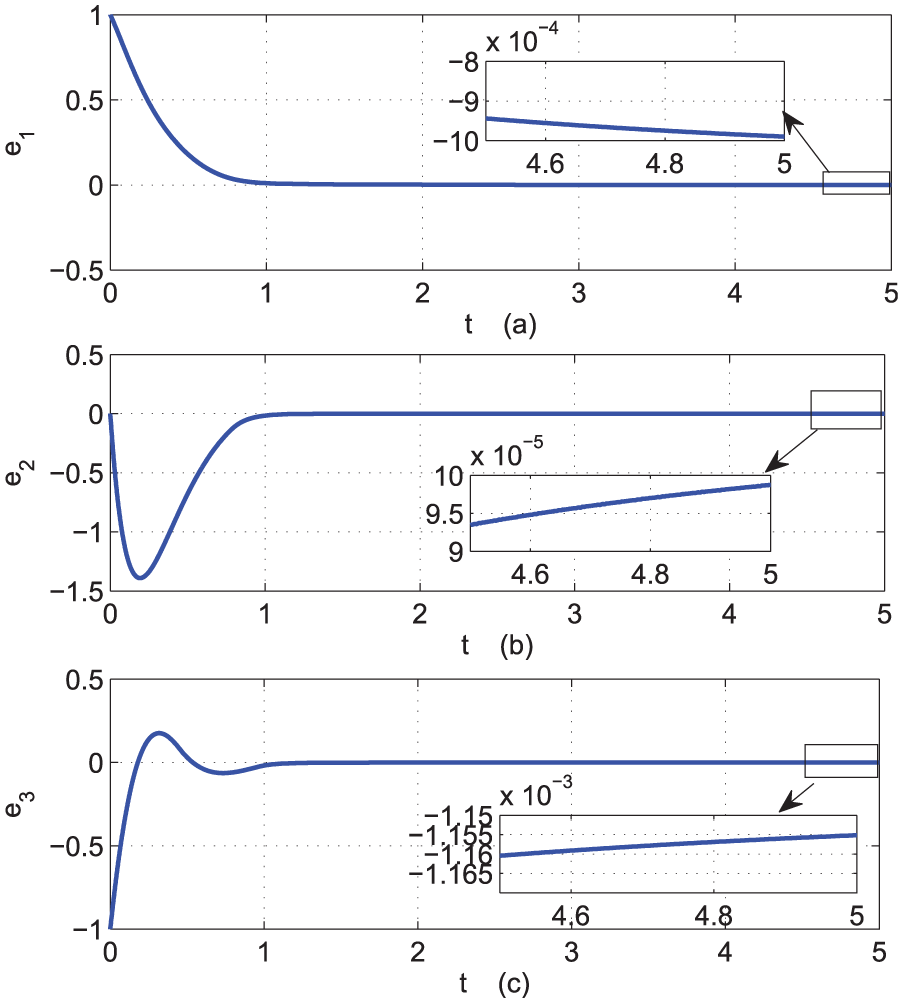
Tracking errors for the system given by equation (39) using the proposed control technique.
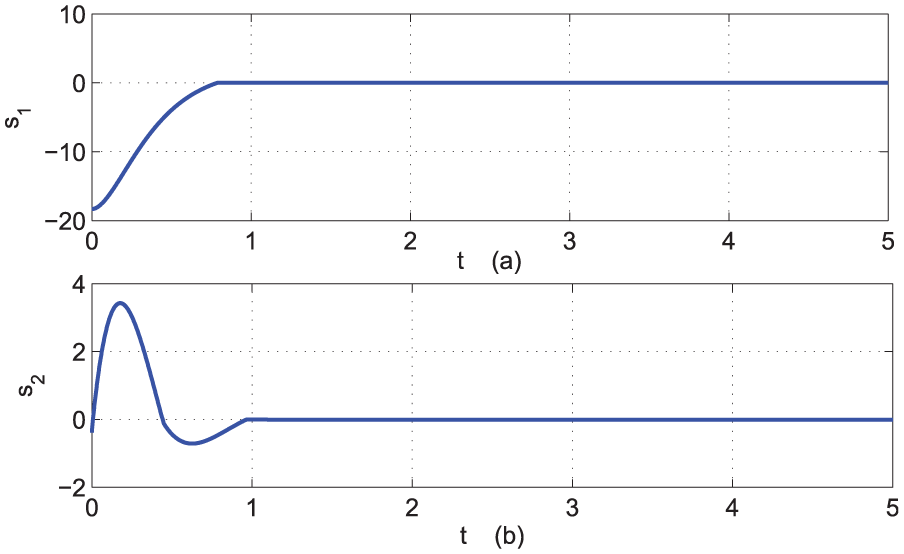
Response of the sliding surfaces for the tracking of equation (39).
Conclusions
In this paper, a new and unusual 4-D conservative chaotic system is reported. The system is developed from a Sprott type-A 3-D chaotic system. The proposed system has no equilibrium point. Thus, it belongs to the hidden chaotic attractors family. The system exhibits coexistence of chaotic orbits. The chaotic behaviour of the system is validated using Lyapunov spectra, phase portraits, frequency spectra and Poincaré map and bifurcation diagrams.
A second-order adaptive time varying SMC is proposed for synchronization between two identical proposed chaotic systems in the presence of matched disturbances, parametric uncertainties and different initial conditions. The parameters of the systems, the gains of sliding surfaces and switching laws are estimated on-line. The performances of the proposed controller are compared with the two available controllers in the work by Lu et al. (2012) and Mobayen et al. (2016). It is found that the proposed controller performs better than the considered two controllers in terms of synchronization time and steady state error.
Footnotes
Conflict of interest
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.