
Abstract
The joint parameter and time-delay estimation problems for a class of nonlinear multirate time-delay system with uncertain output delays are addressed in this paper. The practical process typically has time-delay properties and the process data are often multirate, sampled with output data inevitably corrupted by uncertain delays. The linear parameter varying (LPV) finite impulse response (FIR) multirate time-delay model is initially built to describe the considered system. The problems of over-parameterization and the existence of both continuous model parameters and discrete time-delays have made the conventional maximum likelihood difficult to solve the considered problems. In order to handle these problems, the joint parameter and time-delay estimation for the LPV FIR multirate time-delay model are formulated in the expectation-maximization scheme, and the algorithm to estimate the model parameters and time-delays is derived, simultaneously based on multirate process data. The efficacy of the proposed method is verified through a numerical simulation and a practical chemical plant.
Keywords
Introduction
Modern industrial processes typically perform complex production tasks and exhibit complicated process dynamics, leading to a nonlinear system (Sun et al., 2013; Yao et al., 2014a; Yin et al., 2016; Zhao et al., 2015). The uncertainty of the nonlinear system model can greatly limit the control performance, and therefore the system model should be derived first (Yao et al., 2014b). The nonlinear system identification has been a longstanding and extremely challenging theoretical and engineering problem, and many approaches have been developed to solve it. Among the reported nonlinear system identification approaches, linear parameter varying (LPV) modelling has become one of the most attractive methods due to its relatively simple model structure and close connection with LPV control analysis and synthesis (Toth et al., 2012; Zhong et al., 2010, 2015).
The LPV model has a parametrized linear model structure and the model parameters are typically described as a linear combination of certain basis functions with respect to time-varying scheduling variables. The LPV identification methods can be classified into state-space-based approaches and transfer function-based approaches, according to the adopted model structure. The identification of the LPV state-space model was considered in Wills and Ninness (2011) and an expectation-maximization (EM) algorithm-based method was developed. The assumption of a known state sequence was omitted and the unknown states were estimated by using Kalman smooth in the expectation step. The subspace identification of the LPV model was handled in van Wingerden and Verhaegen (2009). A predictor containing the LPV equivalent of the Markov parameters was constructed based on an introduced factorization, and the state sequence was estimated by using this predictor. The system matrices were then recovered from the estimated state sequence. However, the state-space-based methods are normally computationally complex due to the estimation of an unknown state sequence and the estimated system matrices not being unique. The prediction error method was extended to LPV identification in Zhao et al. (2012). The cost function was built based on one-step-ahead prediction error and the numerical optimization algorithm was used to optimize the cost function, to find the optimal parameter estimates. In Laurain et al. (2009), the instrumental variable method was proposed for LPV Box–Jenkins model parameter estimation. The robust identification of the LPV system was presented in Yang et al. (2015). The robust LPV model was constructed with the
The practical process data set is often not ideal, and the multirate sampled data and time-delays are common (Gopaluni, 2010; Sun et al., 2011; Yan et al., 2016). The non-ideal data have made the process modelling and control very challenging (Sun et al., 2015; Yin et al., 2017). The quality variables and process variables are usually sampled in slow-rate and fast-rate, respectively, due to sensor performance limitations, practical system requirements, etc., resulting in multirate data. In Xie et al. (2013), the multirate process identification with random delays was considered. An initial finite impulse response (FIR) model was identified and the output error (OE) model was then identified based on complete data, with missing output data compensated with output estimates of the FIR model. The multirate system identification can be seen as a special case of the missing data treatment problem. In Yang and Yin (2017), the variational Bayesian approach to identify the linear systems with missing data was proposed, and the missing data were compensated with its distribution. This process often has time-delay properties and the output data are inevitably corrupted by uncertain delays due to transmission, communication limitations (Zhu et al., 2016), etc. The mode-dependent time-varying delays were considered in Zhang et al. (2015) when dealing with the asynchronous state estimation issue for a class of Markov jump neural networks in the
This paper aims to develop a joint parameter and time-delay estimation algorithm for a nonlinear multirate time-delay system. The LPV modelling approach is adopted and the LPV FIR multirate time-delay model is considered. The multirate data are common and the output data are inevitably corrupted by uncertain delays. To our best knowledge, the LPV time-delay identification with multirate data and uncertain output delays has not been reported in the literature. The conventional maximum likelihood method cannot be used to handle the estimation problems. In order to solve the considered problems, the probability model is constructed with Gaussian distribution. Mathematical formulation is performed in the EM algorithm scheme, in which the time-delay process property and uncertain output delays are dealt with simultaneously.
The paper is organized as follows. The problem statement is given in the following section. The EM algorithm is briefly introduced in section ‘Mathematical formation of the nonlinear multirate time-delay system identification problems in the EM framework’. The performance verification of the proposed method is presented in section ‘Verification’ and the final section concludes the work.
Problem statement
Consider the nonlinear multirate system described by the following linear parameter varying (LPV) finite impulse response (FIR) multirate time-delay model

where

where the parameters are a linear combination of meromorphic functions of

Based on equation (1), it can be further derived that

Then, the model (1) is rewritten into a compact form

The measurement noise

where

Denote the recorded slow-rate output data
Mathematical formulation of the nonlinear multirate time-delay system identification problems in the EM framework
The conventional maximum likelihood method is commonly used to solve the formulated estimation problem through maximizing the log likelihood function of the observed data set. The log likelihood function of
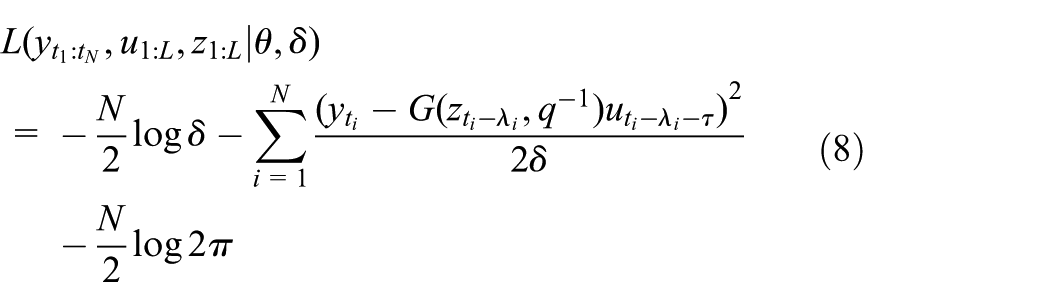
Note that
Brief introduction to the EM algorithm
The EM algorithm simplifies the maximum likelihood estimation problem by introducing the latent variables and missing variables, and conducts the parameter optimization by alternating the expectation step (E-step) and the maximization step (M-step). The EM algorithm begins with the construction of the observed data set
1. Initialize parameters and set
2. E-step: Calculate the following

3. M-step: Maximize the

4. Once convergence of the algorithm is achieved, stop (else, set
Mathematical derivations
The observed data set collects all the available data and is then built as
It is assumed that the delay ranges
The log likelihood function of
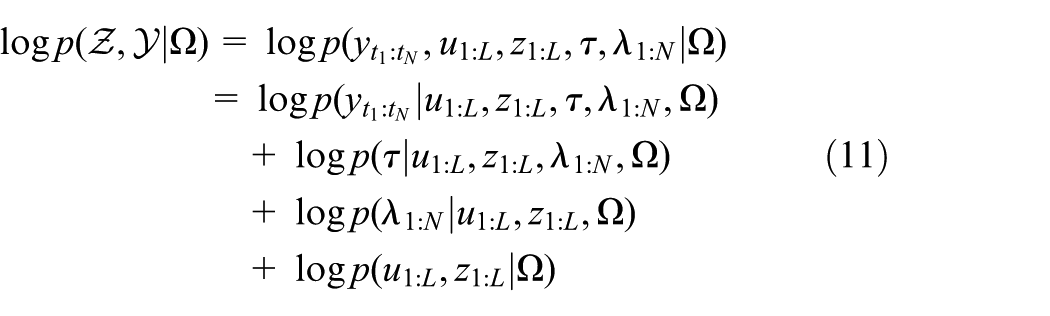
The term
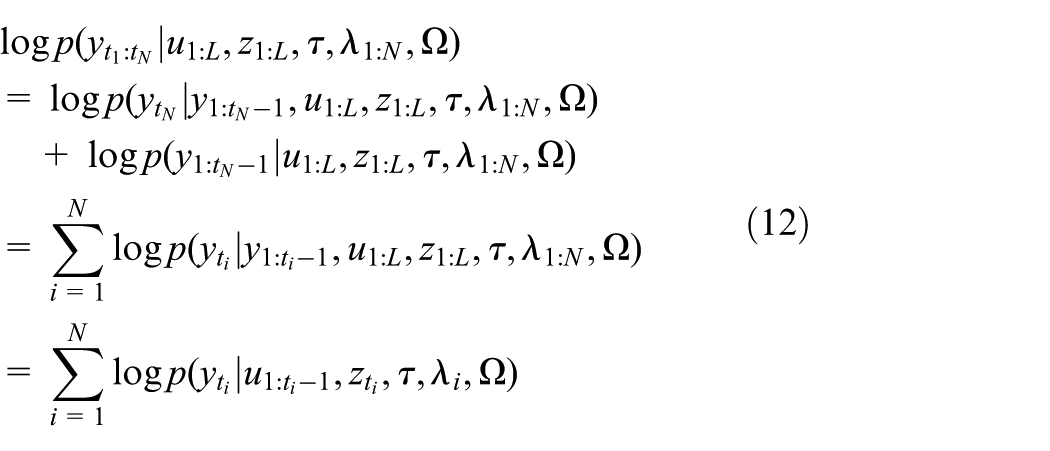
The derivation is based on the fact that output
The term

because the system time-delay is independent of all the data and other parameters.
The term
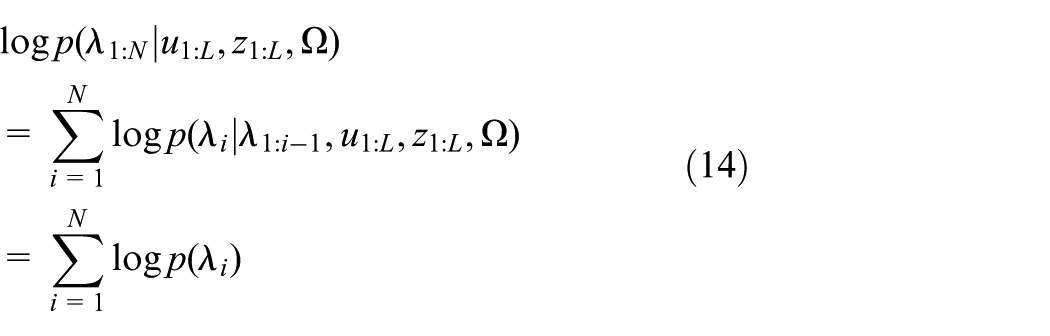
The above formula is derived using the fact that the output delays are independent of each other, and are also independent of all the data and other model parameters.
The final term in (11) is a constant and is denoted as

The log likelihood function of
The
Taking the conditional expectations of

where
and
In order to obtain the complete form of the


The posterior probability of
The posterior probability of

Based on equations (1) and (5), the system model can be written in linear regression form

where
and

Therefore, the cost function
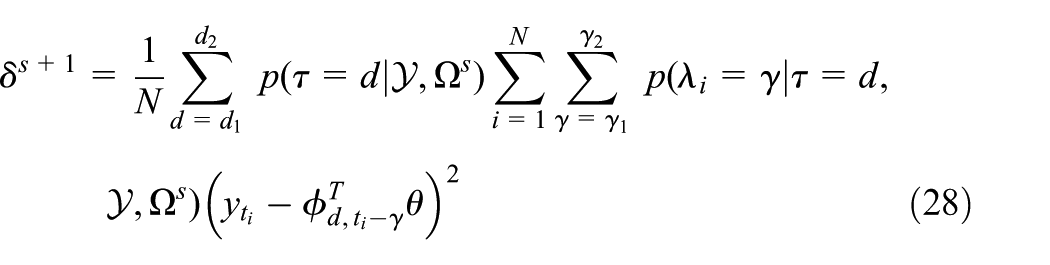
To obtain the formula to update the variance estimate, the derivative is taken over
Solving the above equation, it is derived that
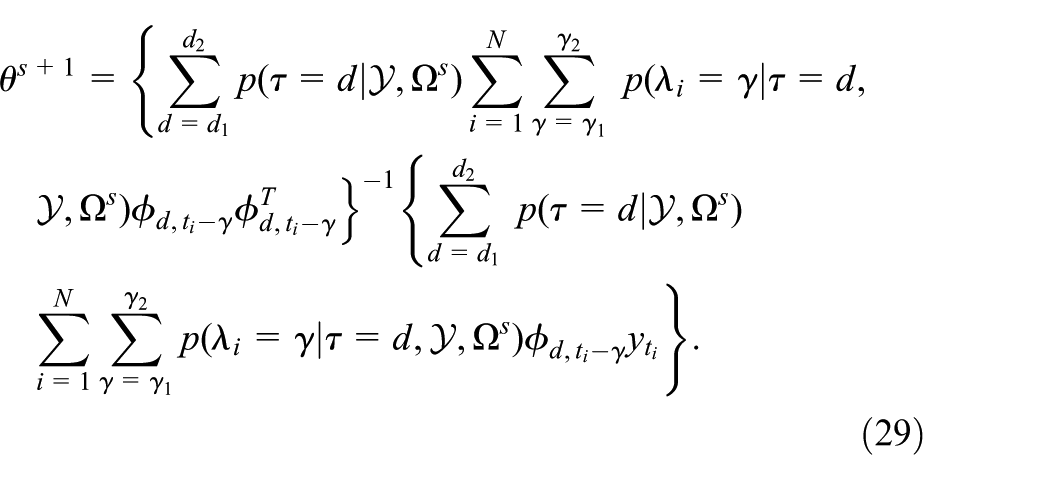
Similarly, the estimate of the model parameters
The estimate of time-delay

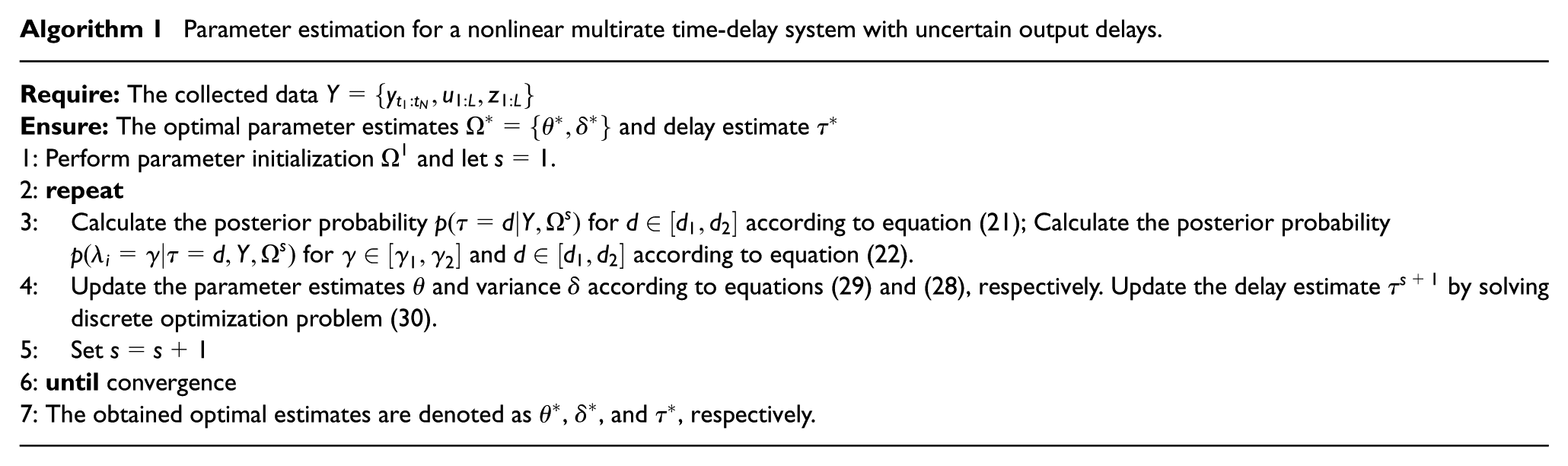
The proposed parameter estimation algorithm for a nonlinear multirate time-delay system described by the LPV FIR multirate time-delay model is summarized in Algorithm 1.
Verification
Numerical example
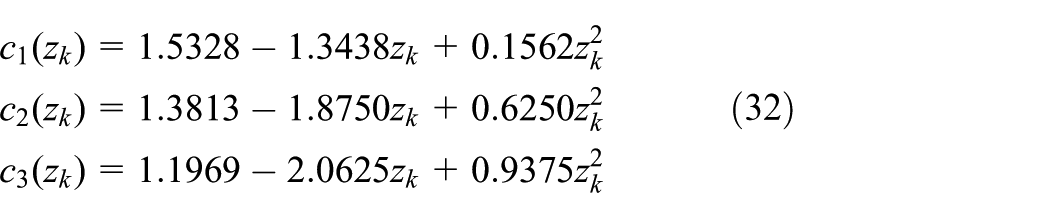
Consider a nonlinear multirate time-delay system described by the following LPV FIR multirate time-delay model

where
The input signal is chosen as the uniformly distributed white noise
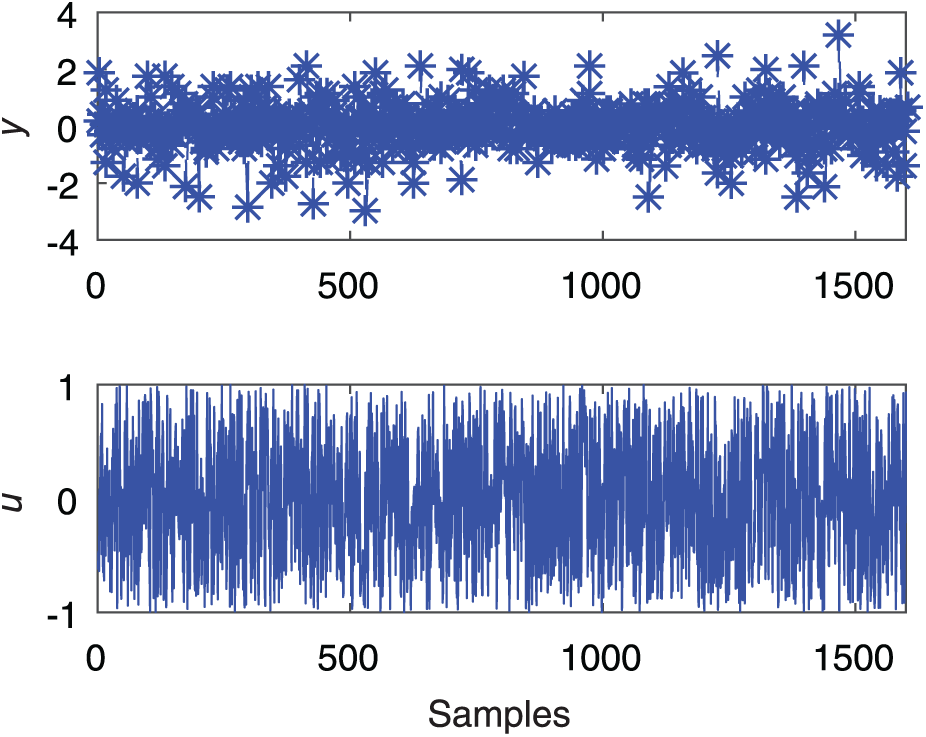
The input data and output data denoted as *.
The proposed joint parameter and time-delay estimation algorithm is applied to the training data set and the convergence condition is set to

The relative parameter estimation error versus iteration.
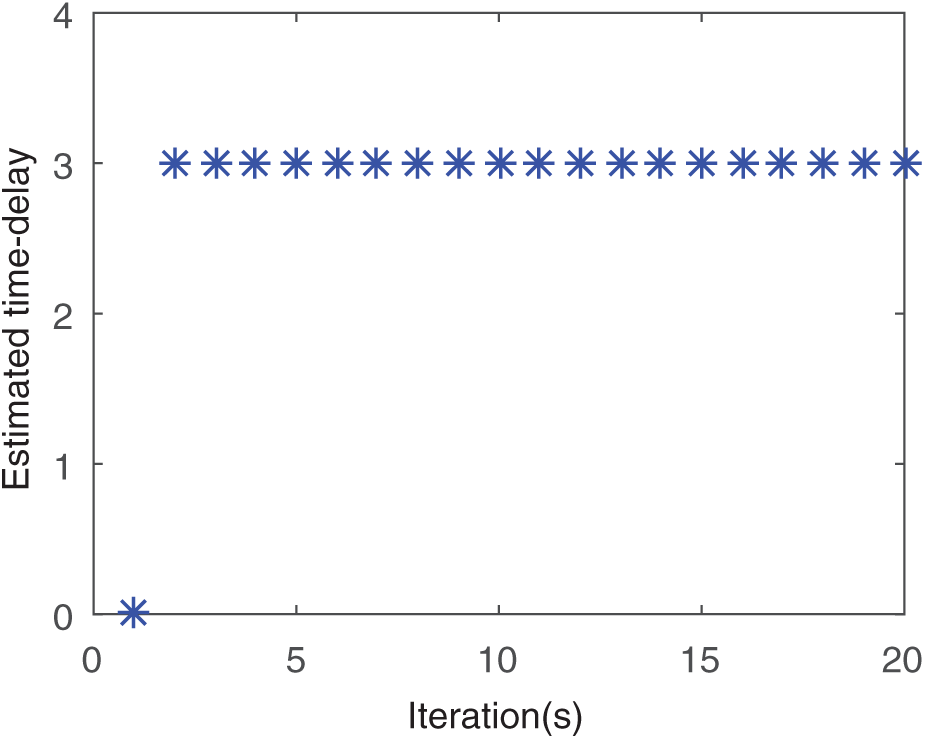
The estimated time-delay versus iteration.
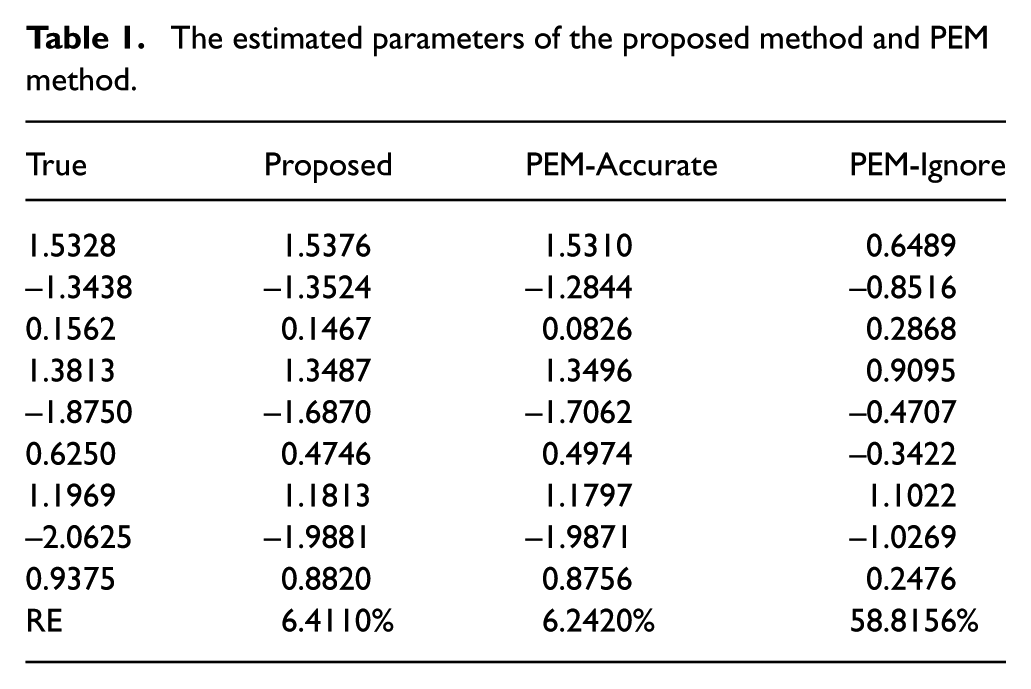
The comparison of the proposed algorithm with the prediction error method (PEM) in Zhao et al. (2012) is conducted. In order to apply the PEM method, the considered LPV FIR model is transformed into linear regression form, one cost function is constructed based on one-step-ahead prediction error, and the model parameter estimates are finally obtained by optimizing this cost function. Note that the PEM method cannot estimate unknown time-delays. Therefore, the proposed algorithm is compared with the PEM method under two conditions: the unknown time-delays in the output data are accurately known (denoted as PEM-Accurate) and the unknown time-delays in the output data are unknown and ignored in the estimation process (denoted as PEM-Ignore). The estimated parameters are given in Table 1. The relative parameter estimation error between the true parameters and the estimated parameters is also calculated. It can be seen from this table, that when the time-delays in the output data are accurately known, the performance of the PEM method is comparable with the proposed method. However, when the time-delays in the output data are unknown and ignored, the PEM method cannot provide satisfactory parameter estimates.
The estimated parameters of the proposed method and PEM method.
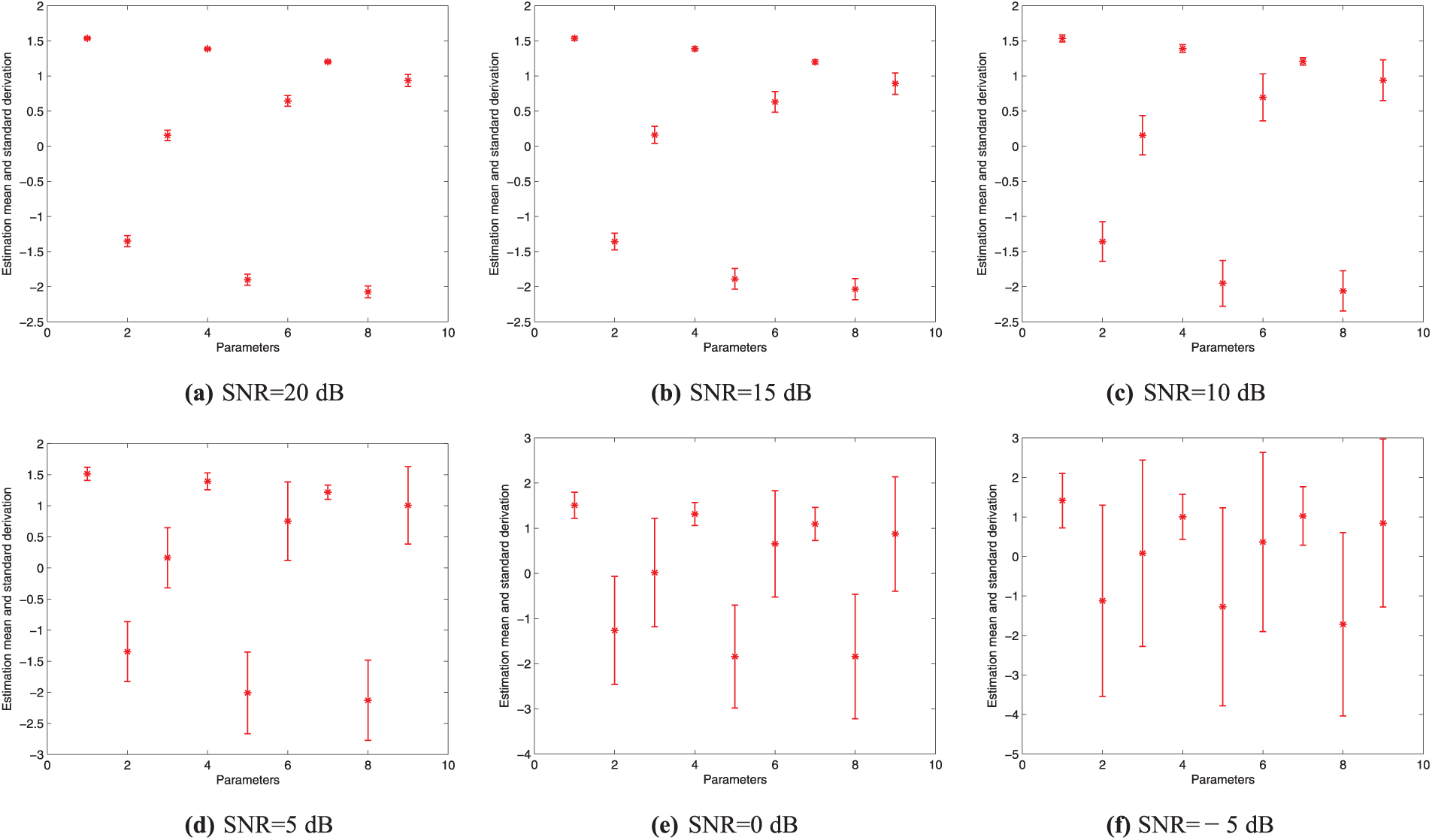
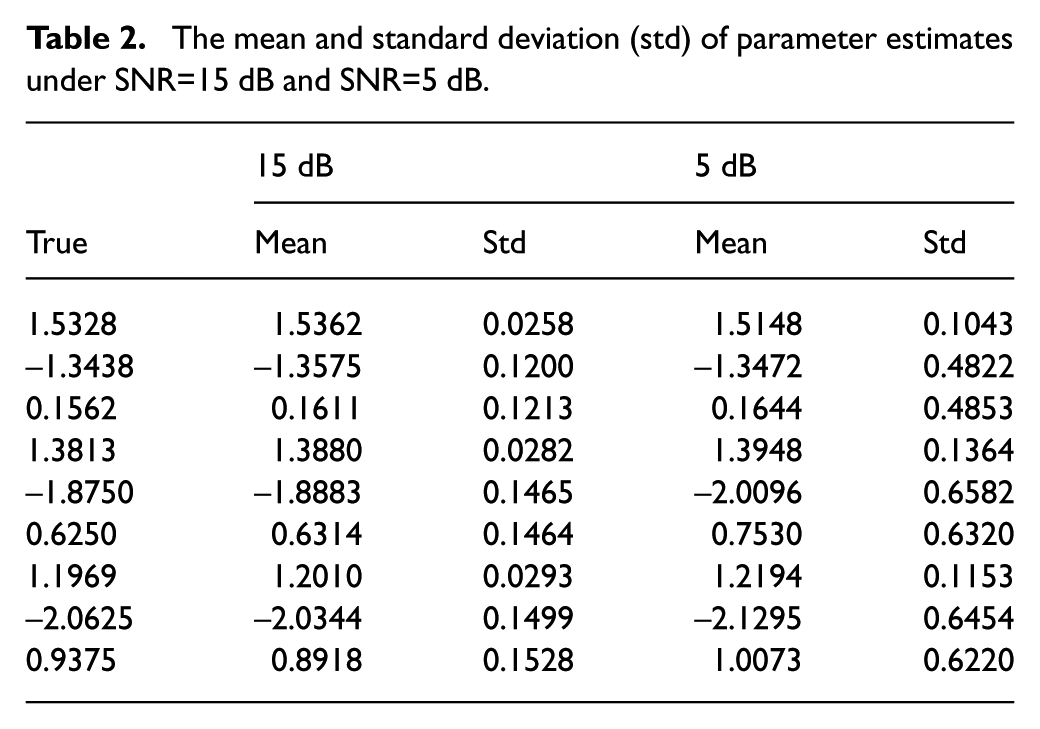
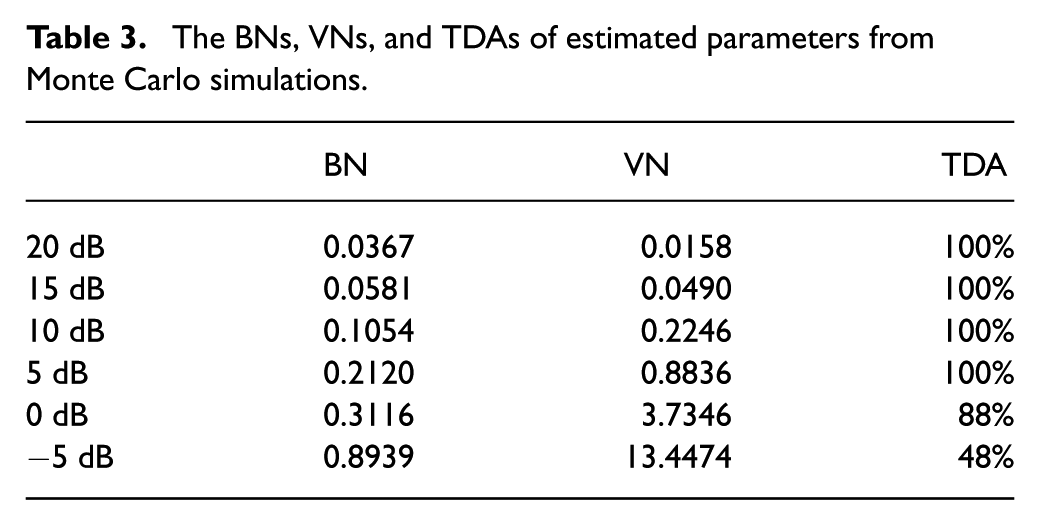
The performance of the proposed algorithm is further verified through Monte Carlo simulations with 100 different noise sequences under signal-to-noise ratios (SNRs) 20 dB, 15 dB, 10 dB, 5 dB, 0 dB, and −5 dB. All the parameter estimates are recorded and the mean and standard deviation of these parameter estimates are calculated to evaluate their accuracy. The results are shown in Figure 4 and Table 2. It can be seen from these results, that the estimated parameters are close to the true parameters and the standard deviations of the estimated parameters increase with the decrease of SNR. The bias norm (BN)
The mean and standard deviation of parameter estimates under different SNRs.
The mean and standard deviation (std) of parameter estimates under SNR=15 dB and SNR=5 dB.
The BNs, VNs, and TDAs of estimated parameters from Monte Carlo simulations.
The continuous stirred tank reactor
The continuous stirred tank reactor (CSTR) is a commonly used reactor type in chemical and biological engineering. The reactants are pumped into the reactor, a zero-order exothermic reaction happens in this reactor, the temperature of the reactor is controlled by the coolant flow, and the products are finally pumped out of the reactor. The process dynamic of the CSTR is described by Gopaluni (2008) as
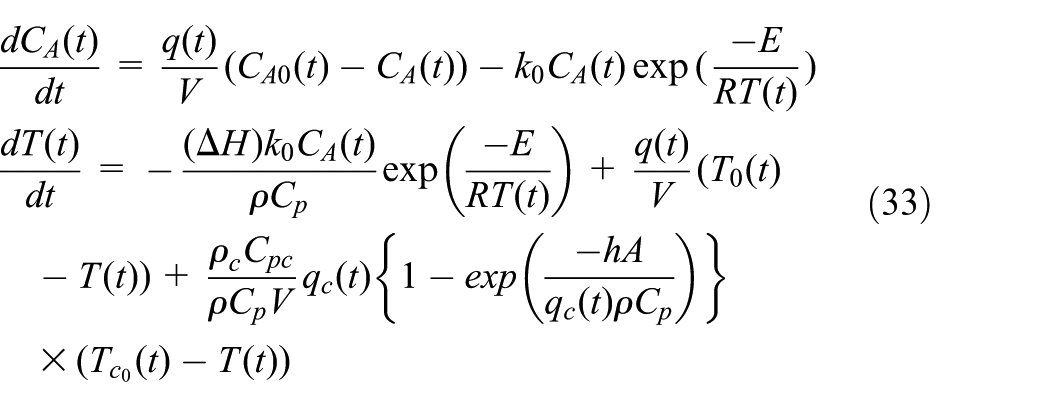
where the physical explanations and steady values of these process variables are also given in Gopaluni (2008).
The
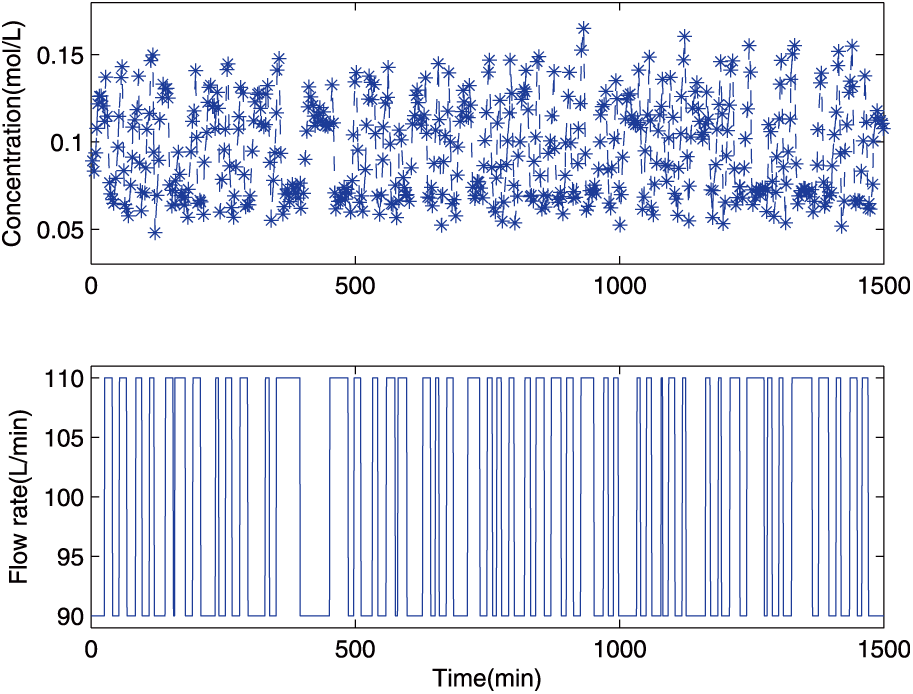
The input and output data of the CSTR system.
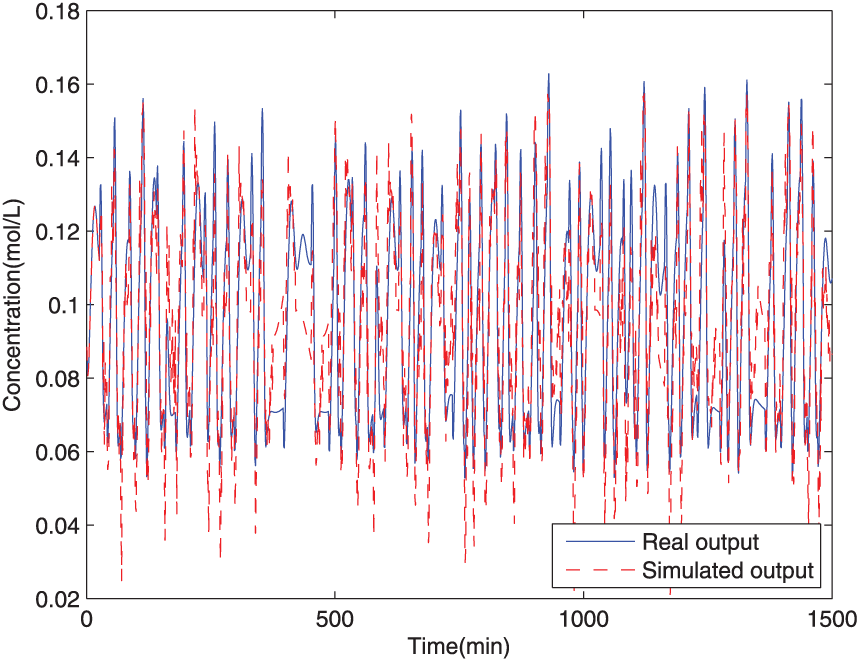
The comparison of the real output and model simulated output for the identification data set.
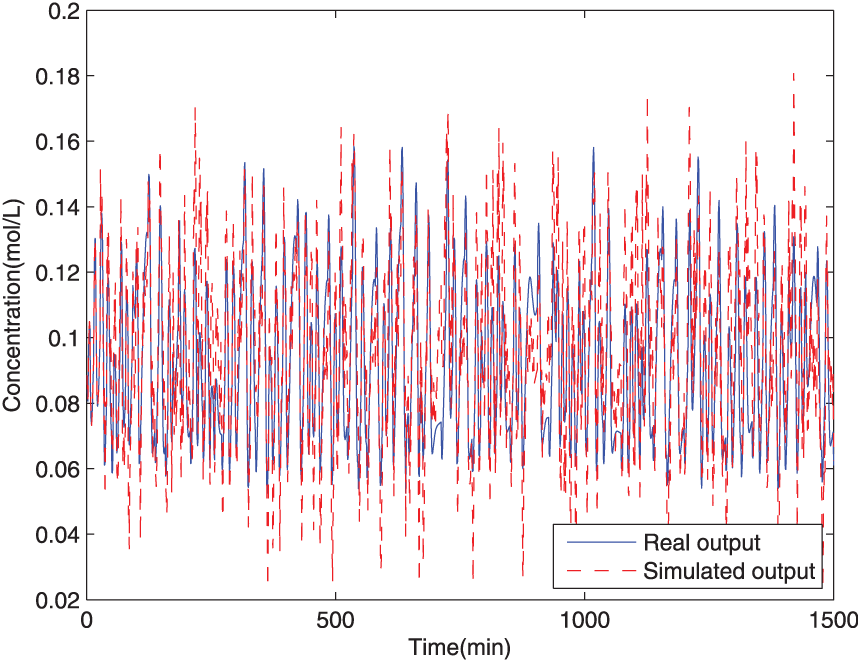
The comparison of the real output and model simulated output for the validation data set.
Conclusion
In this paper, the joint parameter and time-delay estimation problems for a nonlinear multirate time-delay system based on multirate data with output data corrupted by uncertain delays are considered. The LPV FIR multirate time-delay model is introduced and the iterative algorithm to simultaneously estimate the unknown model parameters and time-delays is proposed. The proposed algorithm can effectively handle the multirate data, the time-delay system property, and the uncertain output delays in the estimation process, providing satisfactory parameter estimates. Future research topics include the extensions of the proposed algorithm to an LPV system identification with random input delay and an LPV output error (OE) model identification.
Footnotes
Conflict of interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by National Natural Science Foundation of China under Grant No. 61503097, the First-class General Financial Grant from the China Postdoctoral Science Foundation (Grant No. 2015M80264), and Financial Assistance under Heilongjiang Postdoctoral Fund (Grant No. LBH-Z15080).