This paper investigates the problem of observer-based robust control for a class of continuous-time nonlinear Markovian jump systems (MJSs) with uncertainties, external disturbance and unavailable states that can be represented by Takagi-Sugeno (T-S) fuzzy models. Based on a mode-dependent fuzzy Lyapunov function and by introducing slack matrix variables, a sufficient condition for the existence of the state observer and observer-based robust controller for such MJSs are derived by constructing an augmented fuzzy system. Further, by means of congruent transformation in matrix and linear matrix inequality (LMI) method, the results are given in the form of LMIs that can be easily solved by using the convex optimization techniques. Moreover, we also give the result obtained via common stochastic Lyapunov function to compare with the proposed approach. Finally, a numerical example is provided to illustrate the effectiveness of the proposed approach.
Over the past two decades, the application of Markovian jump systems (MJSs) has become more and more extensive and can be seen everywhere in biochemical systems, manufacturing systems, electrical power systems and other industries (Mariton, 1990). The common character of the above-mentioned physical systems is that they may experience random changes in variable structures and parameters, which usually modeled as MJSs. In the early years, the linear MJSs attracted the attention of scholars; accordingly, lots of research achievements appeared (Boukas et al., 2003; De Souza, 2006). However, the control design of nonlinear MJSs remains as an open research area, more attention was paid to the issue of the nonlinear MJSs and achieved many achievements. (Abolmasoumi and Momeni, 2011; Chen and Shen, 2012; Ma et al., 2017).
Since Takagi-Sugeno (T-S) fuzzy model was proposed by Takagi and Sugeno in 1985 (Takagi and Sugeno, 1985), it has been widely used to deal with the complex nonlinear systems owing to its simplicity and effectiveness. In this type of fuzzy model, a nonlinear system can be represented by a family of local linear systems that smoothly blend through fuzzy membership functions. In the past 10 years, this T-S fuzzy model was applied to deal with the nonlinear MJSs and obtained many results, such as stability analysis and stabilization (Dong and Yang, 2007; Wu and Cai, 2006), control (Assawinchaichote and Nguang, 2007; Chen and Liu, 2007; Wang et al, 2013), and so forth. However, the above results were derived based on stochastic Lyapunov function in which there may exist a certain degree of conservatism. Since Tanaka et al. (2001) proposed fuzzy Lyapunov function approach, it has been widely used to reduce the conservatism in stability analysis and controller design for T-S fuzzy systems (see Chang and Yang, 2010; Kchaou et al., 2015; Mozelli et al., 2009; Sadeghi et al., 2015; Tanaka et al., 2003; Zheng and Zhang, 2016). To the best of our knowledge, very few results are available for fuzzy MJSs (FMJSs) via fuzzy Lyapunov function.
It is well known that the internal states cannot be directly measured in many real-word systems. The observer-based control design is a popular and useful approach to deal with the dynamic systems with unavailable states for measurement. The problem of observer-based control for T-S fuzzy systems was discussed in some references. The fuzzy observer design and controller design for continuous-time T-S fuzzy systems have been studied in Liu and Zhang (2003), and an improvement result has been obtained in Lin et al. (2005). Kim and Park (2009) investigated the problem of robust control for discrete-time T-S fuzzy systems by using multiple Lyapunov function, and the continuous-time case with unknown premise variable via nonquadratic Lyapunov function was discussed in Wang et al. (2016). The above-mentioned T-S fuzzy systems do not consider the random jump of system parameters. Furthermore, Abolmasoumi and Momeni (2011) and Ma et al. (2018) focus on the robust observer-based control for nonlinear MJSs with time-delay that is not described by T-S fuzzy models. So, in this paper, a design methodology of observer-based robust control for nonlinear MJSs that is described by T-S fuzzy models is presented. The main contribution of this paper includes two aspects, as follows:
We propose a mode-dependent fuzzy Lyapunov function approach to study the control problem for FMJSs with uncertainties, external disturbance and unavailable states, which is not seen in other literatures.
Compared with the traditional approach, stochastic Lyapunov function, the fuzzy Lyapunov function can obtain a less conservative condition and improve the performance of the system.
This paper is organized as follows. Section 2 describes the continuous-time nonlinear MJSs and some preliminaries. Section 3 presents the main results on the design approach of observer-based robust controller based on fuzzy Lyapunov function approach. Section 4 shows an illustrative example of the results. Finally, Section 5 concludes the paper.
Notation: Throughout the paper, denotes n-dimensional Euclidean space, is the set of all real matrices, refers to the space of square integrabel functions over the interval ; the superscript “-1” and “T” stand for the inverse and transpose of a matrix, respectively; I is the identity matrix of appropriate dimension; the symbol “*” represents the transposed elements in the symmetric positions of a symmetric matrix; denotes the mathematical expectation operator; and means a block diagonal matrix.
System descriptions and preliminaries
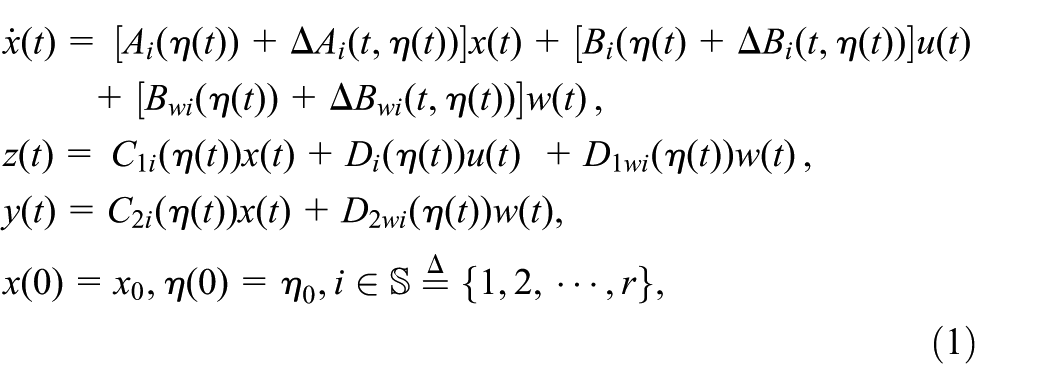
Consider a class of uncertain continuous-time nonlinear MJSs that can be represented by the following T-S fuzzy models
Plant Rule :
IF is and … and is
THEN
where are the premise variables, are the fuzzy sets, is the number of IF-THEN rules. is the state vector, is the control input, is the disturbance input which belongs to , is the controlled output, is the measured output. is a continuous-time discrete-state Markov process taking values in a finite set . Let , where , denote the transition probability matrix with
where , . Here, the parameter is the transition rate from mode l to mode k satisfying for and .
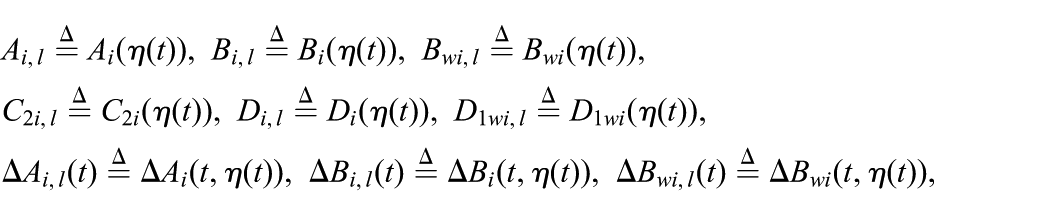
For each possible value of , , the matrices associated with the th mode are denoted by
where , , , , , , , are known constant matrices of appropriate dimensions. The matrix functions , , represent the time-varying parameter uncertainties in the system and are assumed to be norm-bounded of the following form
where , , and are known constant matrices, which characterize the structure of the uncertainties. are unknown time-varying matrix functions with Lebesgue measurable elements satisfying , .
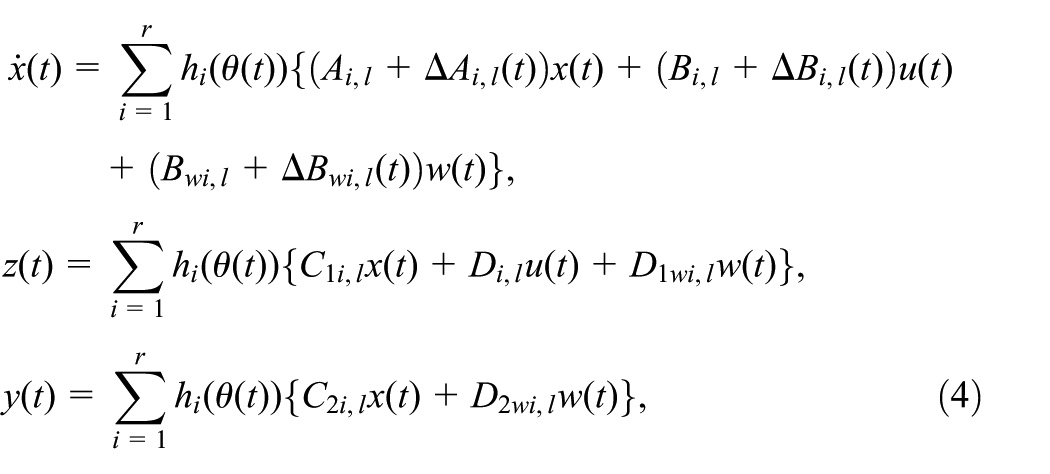
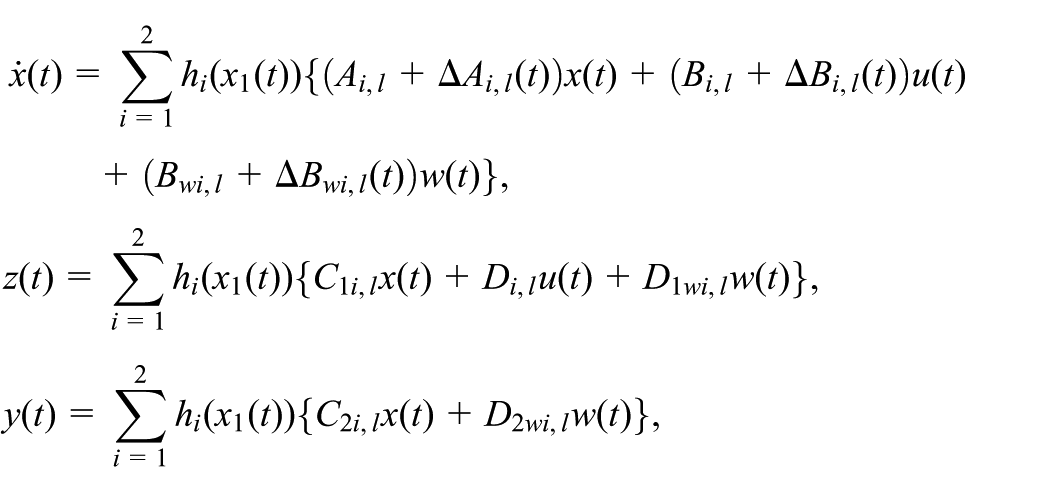
Let the mode at t be l and using the center-average defuzzifier, product inference, and singleton fuzzifier, (1) is inferred as
where , are fuzzy weighting functions satisfying
Before the main results are presented in next section, the following definitions and lemmas have to be given. For the sake of simplicity, we use , to denote and , respectively.
Definition 1 (Wang and Luo, 2008): The FMJS (4) with , is said to be robust stochastically stable if for any initial value and any initial mode , there exists a matrix such that for all admissible uncertainties, the following inequality holds
Definition 2 (Chen and Liu, 2007): Given a real number , the FMJS (4) is said to be robustly stochastically stable with disturbance attenuation level if for any initial mode , under zero initial condition, the controlled output satisfies
for all admissible uncertainties and any non-zero .
Lemma 1 (Li et al., 2009): Given constant matrices , and of appropriate dimensions and with matrix symmetric, then for all satisfying , if and only if there exists a scalar such that .
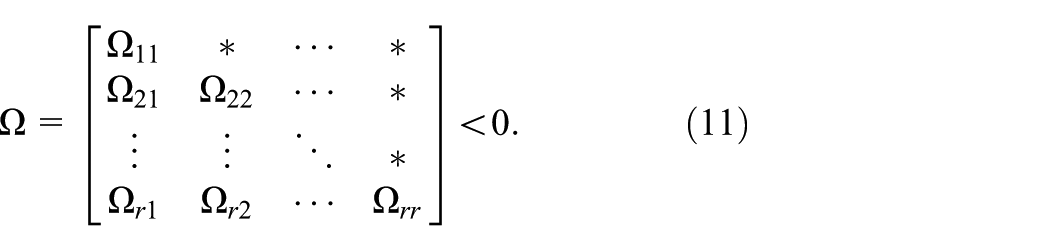
The inequality (8) is true if there exist matrices and , such that the following conditions are satisfied
Main results
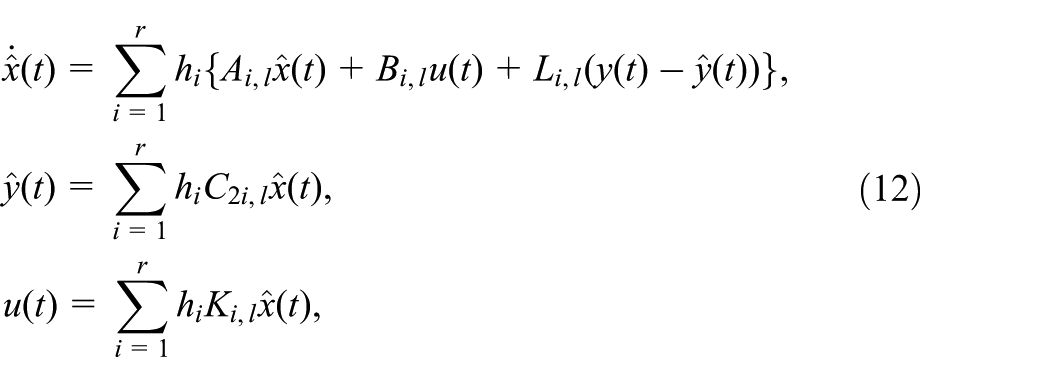
In this section, we focus our attention on the observer-based robust control problem for FMJS (4) and introduce the fuzzy Lyapunov function approach to solve this problem. To construct the state observer for FMJS (4), we assume that the premise variable of fuzzy model , are measurable. Through parallel distributed compensation (PDC) scheme, we construct the following state observer and feedback controller
where is the state estimation of , is the observer output, and , , , are, respectively, the observer and controller constant gain matrices to be determined.
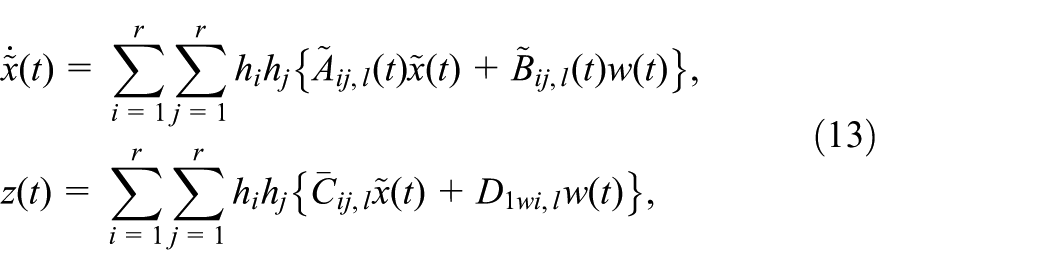
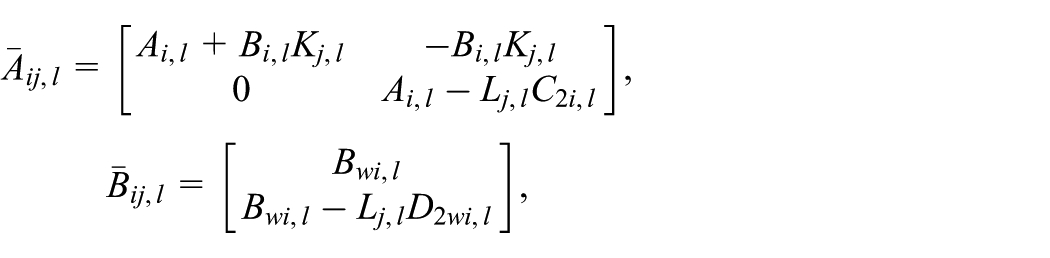
Let us denote the state estimation error as . Combining (4) with (12), the augmented closed-loop fuzzy system is written as
where
Now, we propose a performance condition to guarantee the augmented (13) system robustly stochastically stable with disturbance attenuation level.
Theorem 1: Given scalars , , assume that
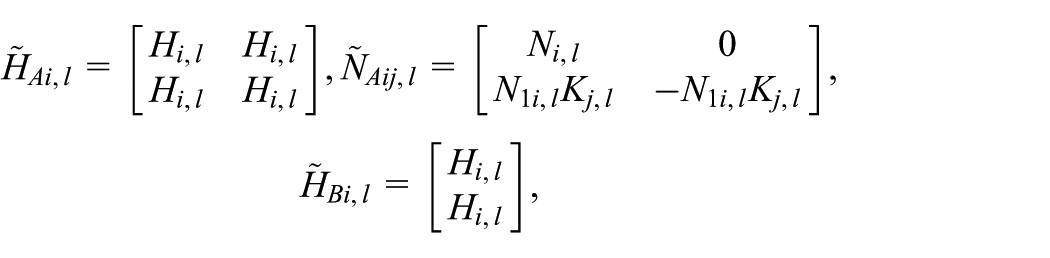
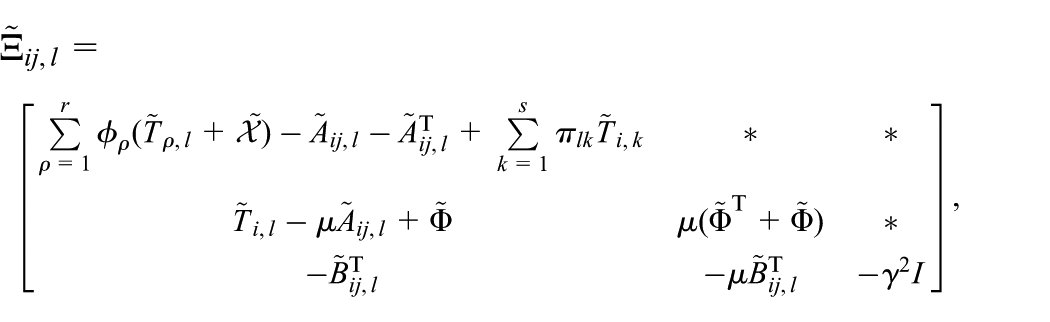
where , , the augmented system (13) is robustly stochastically stable with γ disturbance attenuation level if there exist scalars , symmetric matrices , , and matrices , , , with appropriate dimensions such that the following inequalities hold:
where
Proof: Construct the following mode-dependent fuzzy Lyapunov function:
where , are all positive definite matrices with appropriate dimensions to be determined. Along any trajectory of augmented system (13), the weak infinitesimal operator acting on is defined as
Considering the properties in (5), we have
Considering the augmented system (13), the following equality holds for any square matrix with appropriate dimensions
Assume that (14) holds, adding formulas (21) and (22) to (20), we have
where
From Dynkin’s formula and the fact that , it can be obtained that
Define . Then, for any non-zero ,
where
According to the Schur complement, the above inequality is less than zero if the following matrix inequality is satisfied
Considering the uncertainty part given in (13), the above inequality can be written as
where
According to Lemma 1 and Schur complement, we can easily obtain the following inequality holds
It is equivalent to
Based on Lemma 2, it can be see that if (16)–(18) are satisfied, the above inequality holds, it shows that for all , holds. By definition 2, the augmented system (13) is robustly stochastically stable with disturbance attenuation level. This completes the proof.
Now we must prove the robustly stochastically stable of augmented system (13) with . Consider , (23) can be written as
where
It is easy to see that if holds. Noting (24), we have
where , is the minimal eigenvalues of the corresponding matrix. By Dynkin’s formula, we have for each , ,
On the other hand, for each , we can show that
where . The above two inequalities imply that
where , . Then, by the Gronwell-Bellman lemma, we obtain
Therefore,
Taking the limit as , we have
where , , is the maximal eigenvalues of the corresponding matrix. By definition 1, the augmented system (13) with is robustly stochastically stable.
Remark 1: It would be observed that Theorem 1 presents the performance condition for augmented system (13) by designing an observer-based controller. However, it is easy to find the conditions are nonlinear matrix inequalities (nLMIs) with respect to the parameter matrices , and , which cannot be solved directly by LMI toolbox of Matlab.
In the following, by means of congruent transformation in matrix and LMI method, we transform the nLMIs into a set of LMIs, it thus can be easily solved by convex optimization techniques. Here is the theorem.
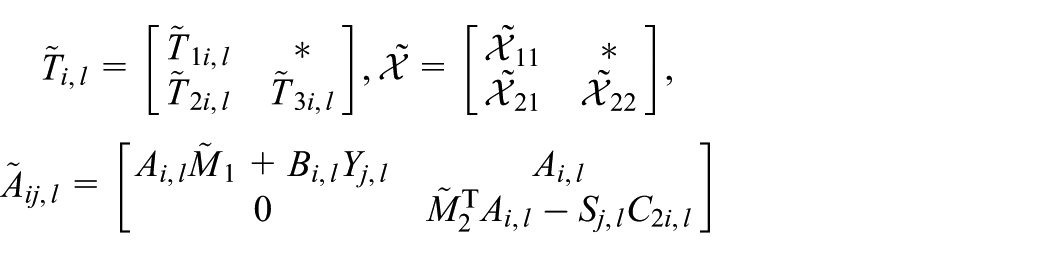
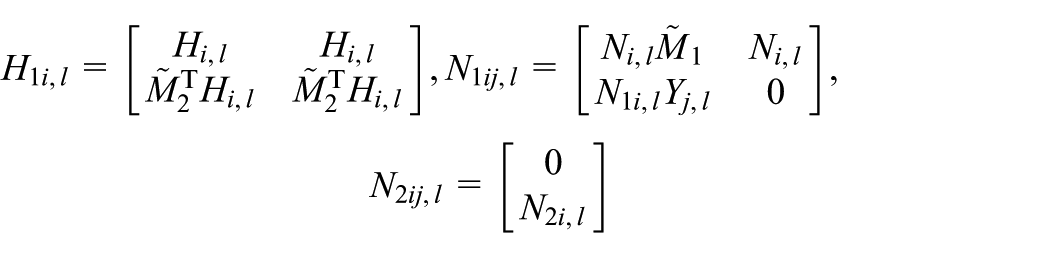
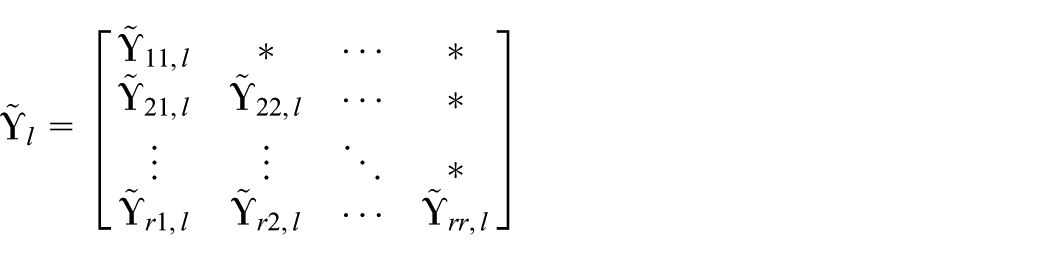
Theorem 2: Given scalars , , consider assumption (14), the augmented system (13) is robustly stochastically stable with disturbance attenuation level, with control laws , observer gains , if there exist scalars , symmetric matrices , , and matrices , , , , , , with appropriate dimensions such that the following LMIs hold
where
Proof: Under the condition of Theorem 2, it is easy to verify , this implies that and . Therefore, , are non-singular matrices.
Defining
Without loss of generality, we set
First, performing a congruence transformation to (31)–(33) by , and then by . We can derive that the inequalities (15)-(17) hold with
Furthermore, defining and checking a congruence transformation by to (34) show that (18) holds. Then, from Theorem 1, the augmented system (13) is robustly stochastically stable with disturbance attenuation level. This completes the proof of Theorem 2.
Remark 2: According to Theorem 2, by solving the following optimization problem
s.t. LMIs (31)–(34)
we can derive that the minimum disturbance attenuation level of for augmented system (13) by using fuzzy Lyapunov function approach, and the responding controller is the optimal robust controller.
Remark 4: The slack matrix variables are introduced to decouple the Lyapunov matrices from the system matrices, providing new degrees of freedom to the LMI problems.
In the next, in order to compare with the fuzzy Lyapunov function approach, we will use the common stochastic Lyapunov function to solve the same problem. Here is the result.
Theorem 3: Given scalars , , the augmented system (13) is robustly stochastically stable with disturbance attenuation level, with control laws , observer gains , if there exist scalars , symmetric matrices , and matrices , , , , , , with appropriate dimensions such that the following LMIs hold:
where
and , , , are defined in Theorem 2.
Proof: Consider the following common stochastic Lyapunov function:
Along any trajectory of augmented system (13), the weak infinitesimal operator acting on is defined as
As the following proof process is similar to Theorem 1 and 2, we can easily obtain the Theorem 3, so we omit it in here for simplicity.
Remark 5: According to Theorem 3, by solving the following optimization problem
s.t. LMIs (35)–(37)
we can derive that the minimum disturbance attenuation level of for augmented system (13) by using common stochastic Lyapunov function approach.
Remark 6: Fuzzy Lyapunov function was proposed in Tanaka et al. (2001), Mozelli et al., (2009), and so forth, to investigate the stability of fuzzy-model-based control systems. The fuzzy Lyapunov function comprises multiple quadratic functions that are combined by membership functions. Conceptually, as different quadratic functions are employed in different sub-regions for stability analysis, it is able to produce more relaxed stability analysis result compared with the work with a single quadratic Lyapunov function. However, for the stability analysis and controller design of FMJSs, most of the results are obtained based on a common stochastic Lyapunov function, there may be conservative in some cases. So, in this paper, we propose the mode-dependent fuzzy Lyapunov function approach to reduce the conservatism.
Numerical example
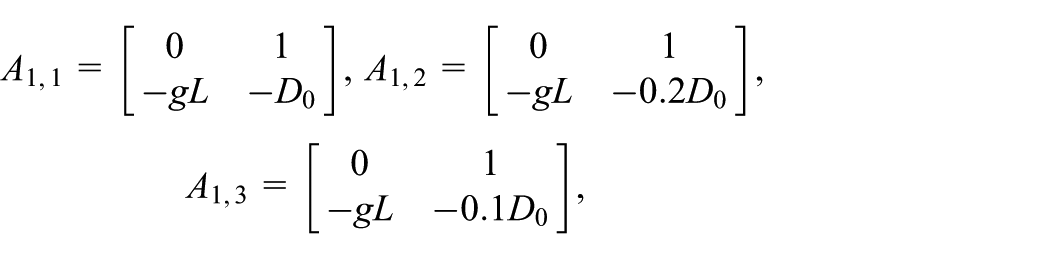
To illustrate the effectiveness of the theory developed in this paper, we consider the following a single-link robot arm, the dynamic equation is given by Wu and Cai (2006)
where is the angle position of the arm, and is the control input. is the mass of the payload, is the moment of inertia, is the acceleration of gravity, is the length of the arm, and is the coefficient of viscous friction. The values of parameters g and L are given by and . We assume that the parameter is bounded within 10% of its nominal value , and the parameters M and J have three different modes as shown in the following
The transition probability-rate matrix that relates the three operation modes is given as follows:
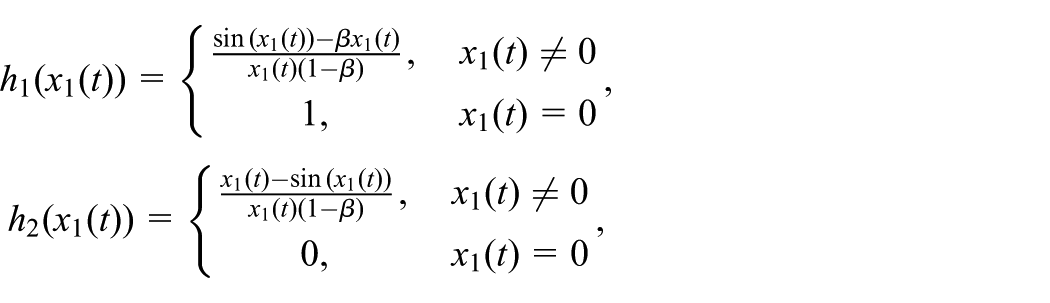
Let and . Using the same procedure as in Wu and Cai (2006), the nonlinear term can be represented as
where , , and . By solving the equations, the membership functions and are obtained as follows
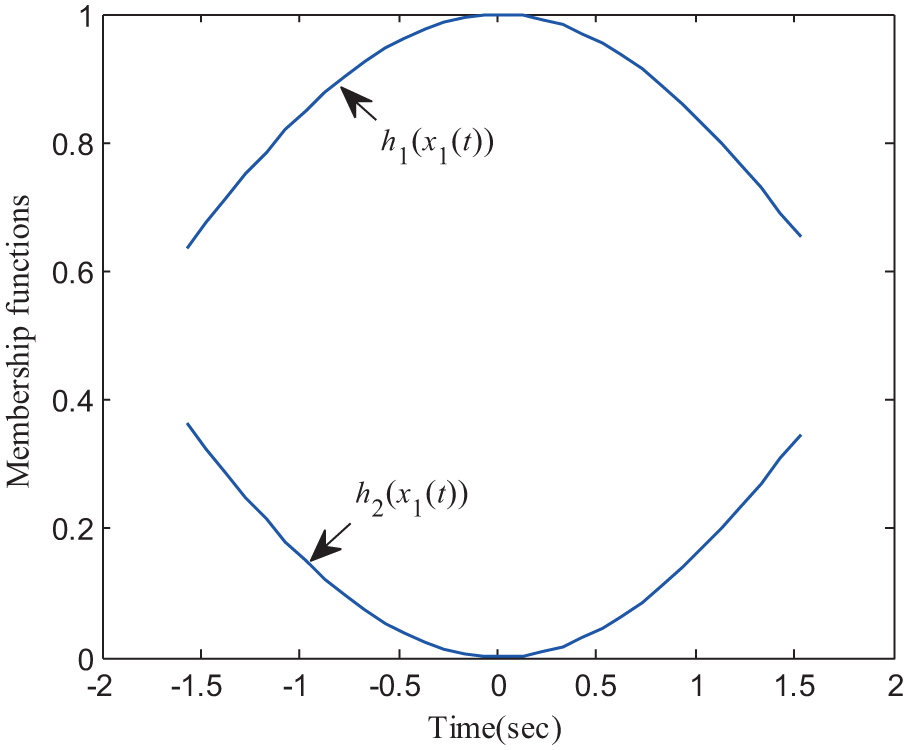
where . We assume , then the plot of membership functions for fuzzy rules can be obtained, as shown in Figure 1.
Membership functions for fuzzy rules.
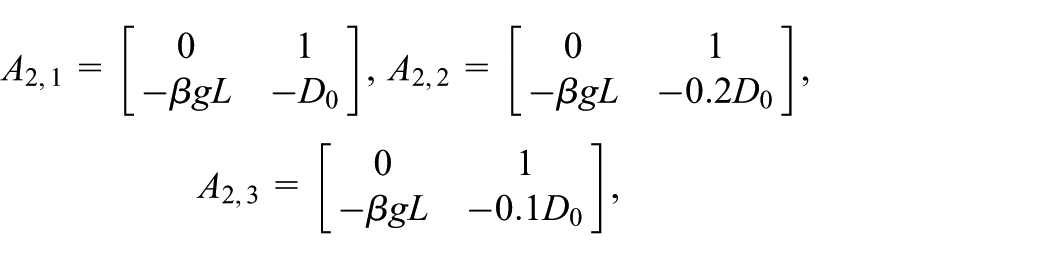
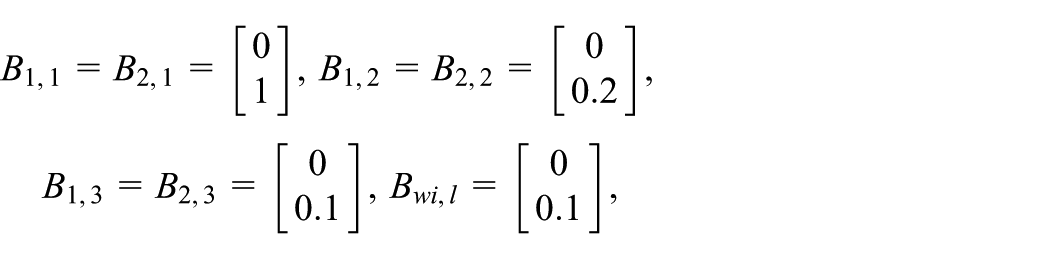
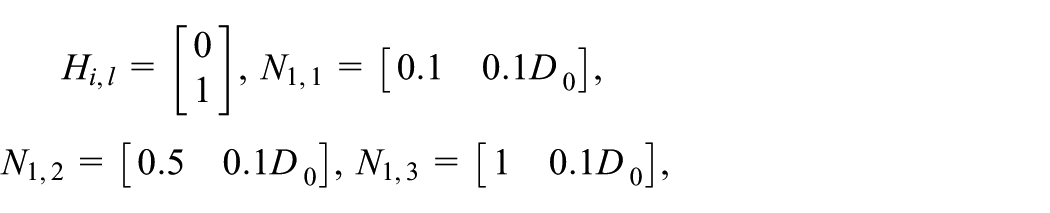
We consider the following fuzzy model to design an observer-based robust fuzzy controller that achieves performance
where
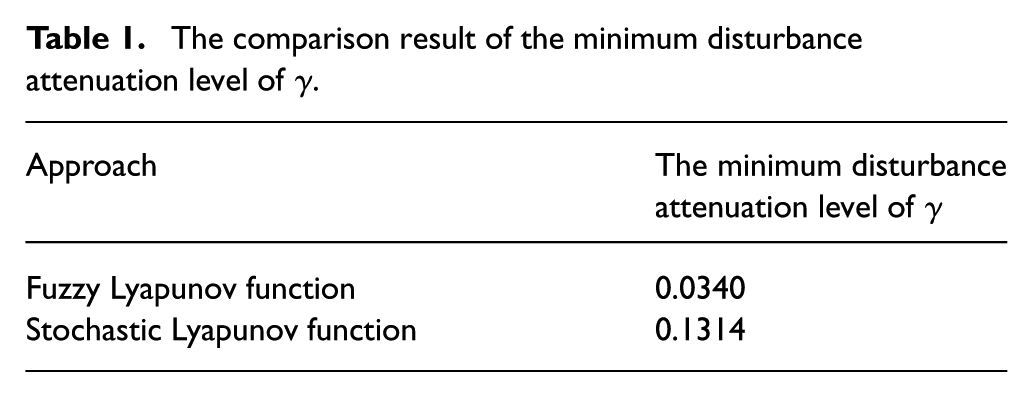
Now, for brevity, given , , the parameters are assumed to be as . Based on Remark 2 and 5, we use the fuzzy Lyapunov function approach and common stochastic Lyapunov function approach to solve the optimization problem, respectively. For the comparison result of the minimum disturbance attenuation level of , see Table 1. It can be seen that the fuzzy Lyapunov function acquire a less disturbance attenuation level than common stochastic Lyapunov function. In other words, fuzzy Lyapunov function can reduces the conservatism and improves the performance of the system.
The comparison result of the minimum disturbance attenuation level of .
Approach
The minimum disturbance attenuation level of
Fuzzy Lyapunov function
0.0340
Stochastic Lyapunov function
0.1314
Given , according to Theorem 2 and using LMI toolbox in MATLAB, the feedback and observer gain matrices are computed to be as follows
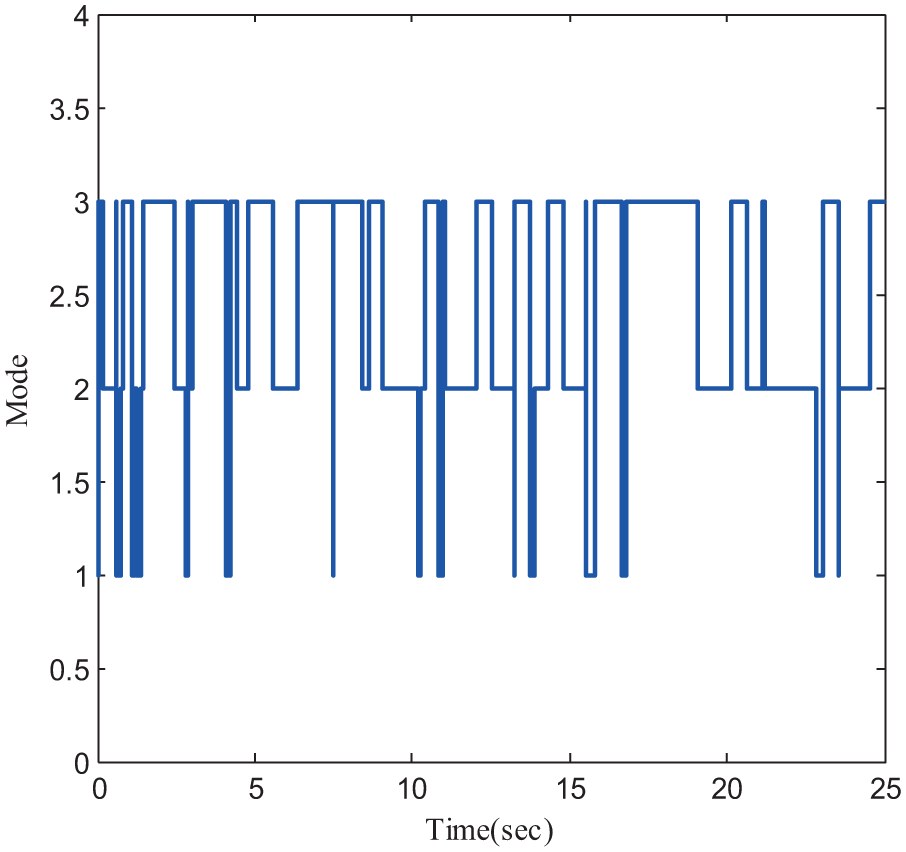
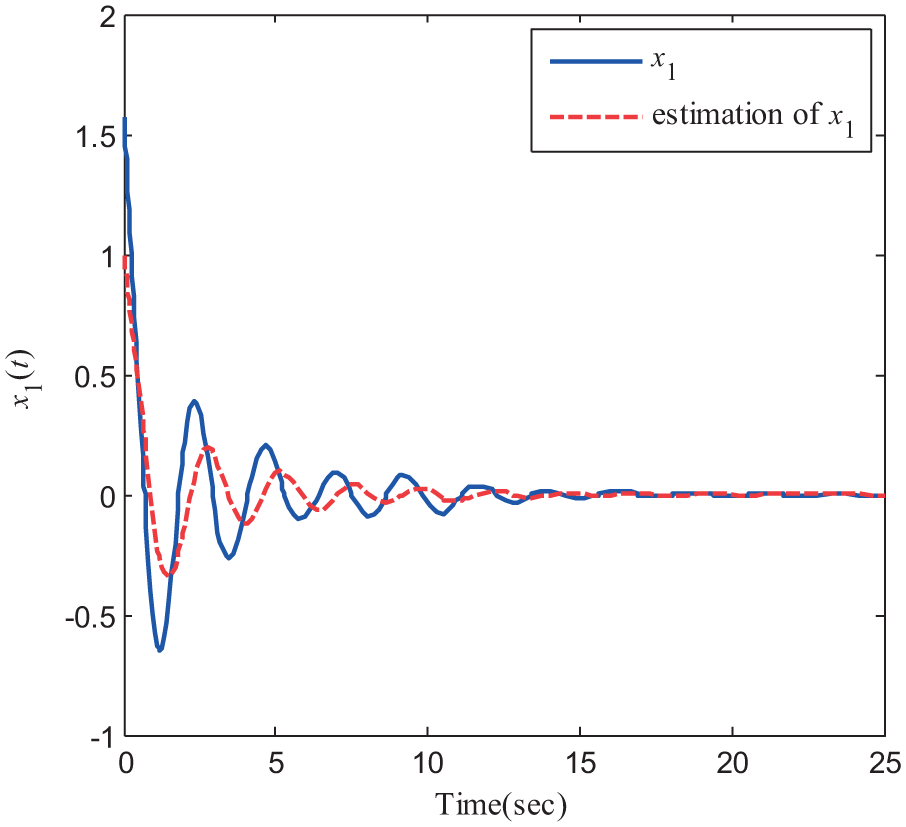
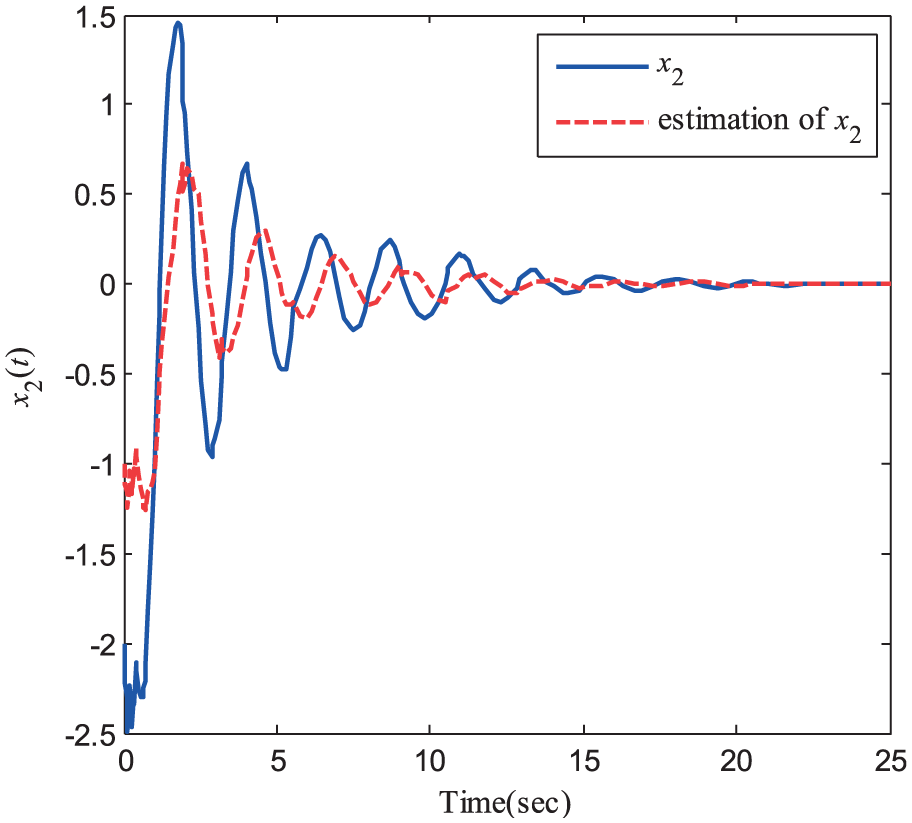
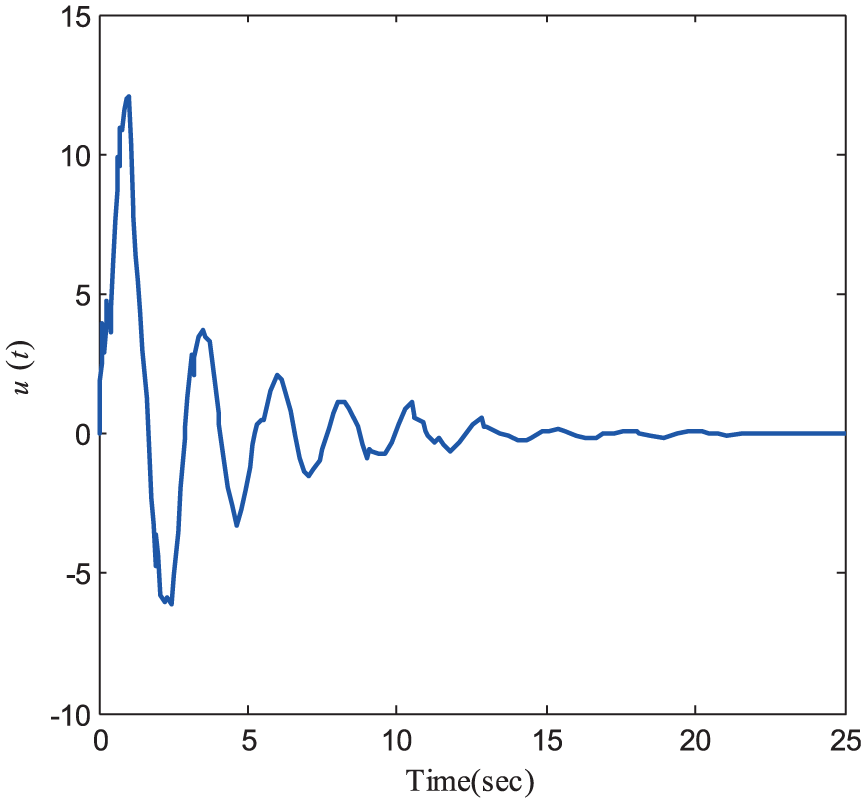
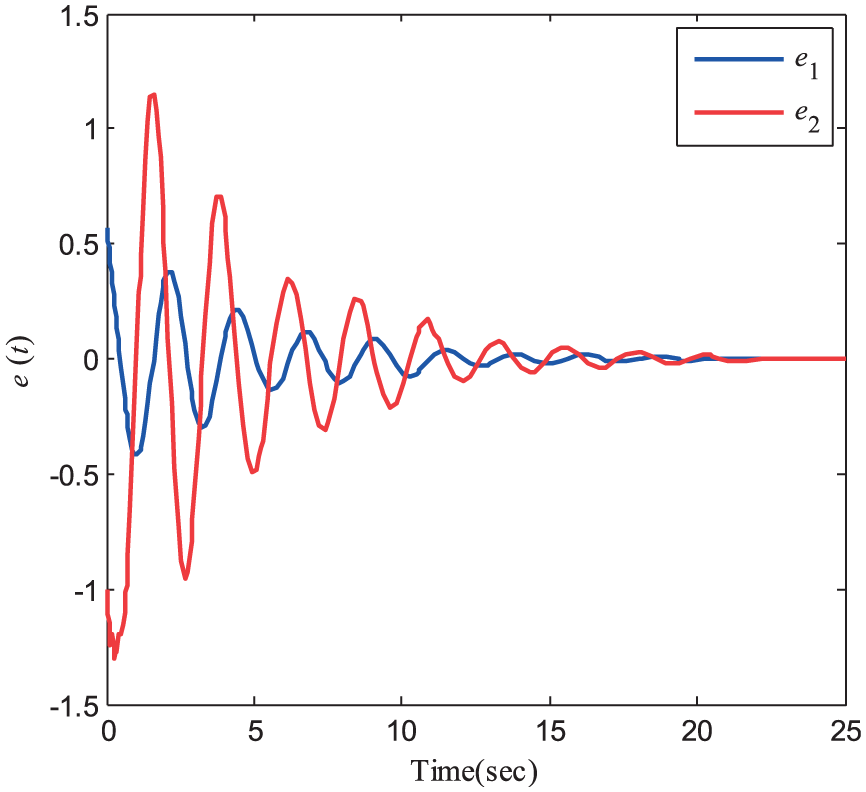
For the simulation, we take the disturbances to be , , the initial condition , . The system modes is shown in Figure 2. Figures 3 and 4 depict the trajectories of the single-link robot arm system states response and their estimation, respectively. Figures 5 and 6 show the response of control and the estimation error . We can observe that the estimation of system states can well track its real states, and the estimation error tends to zero in a period of time. In addition, it can be seen that the observer-based robust controller effectively stabilizes the system. The above shows the feasibility of the designed observer and robust controller.
System modes.
Response and estimation of the state .
Response and estimation of the state .
Response of .
Estimation error .
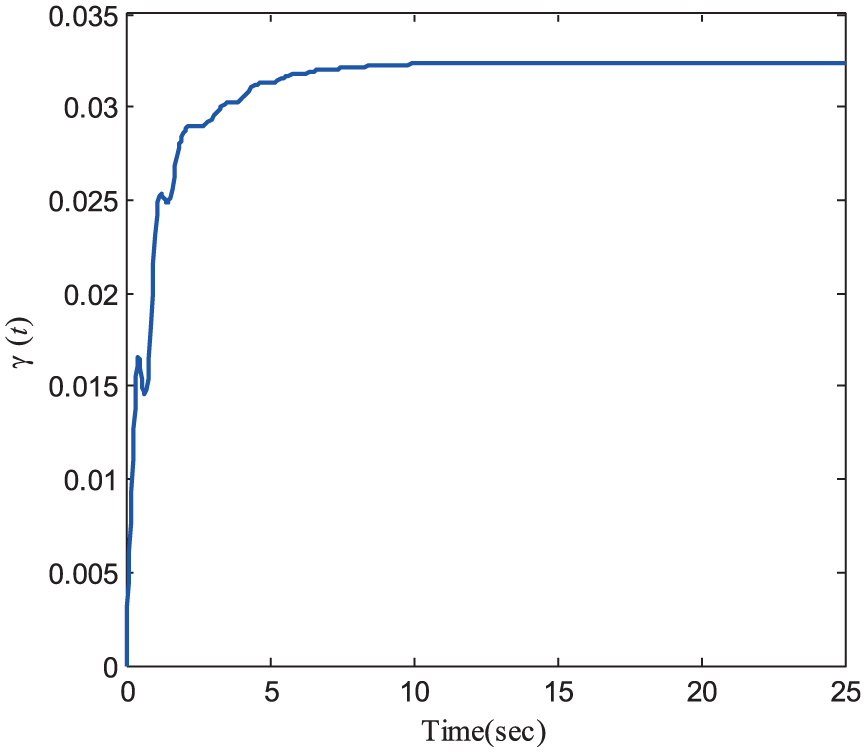
The disturbance attenuation ratio, which is defined as: , is shown in Figure 7. It is obvious that the disturbance attenuation ratio is always far less than the prescribed value 1 under zero-initial conditions and reveals the effectiveness of Theorem 2.
Evolution of .
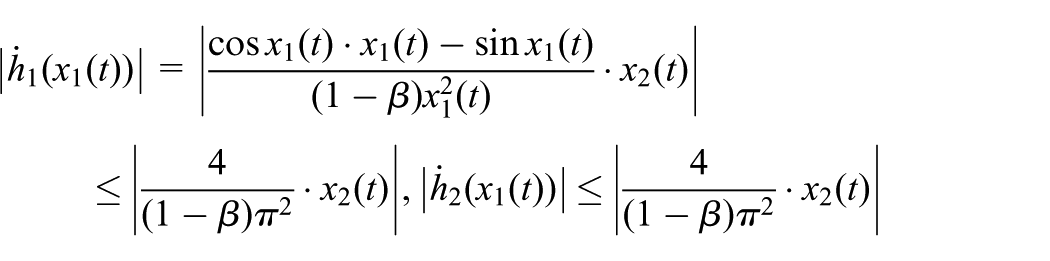
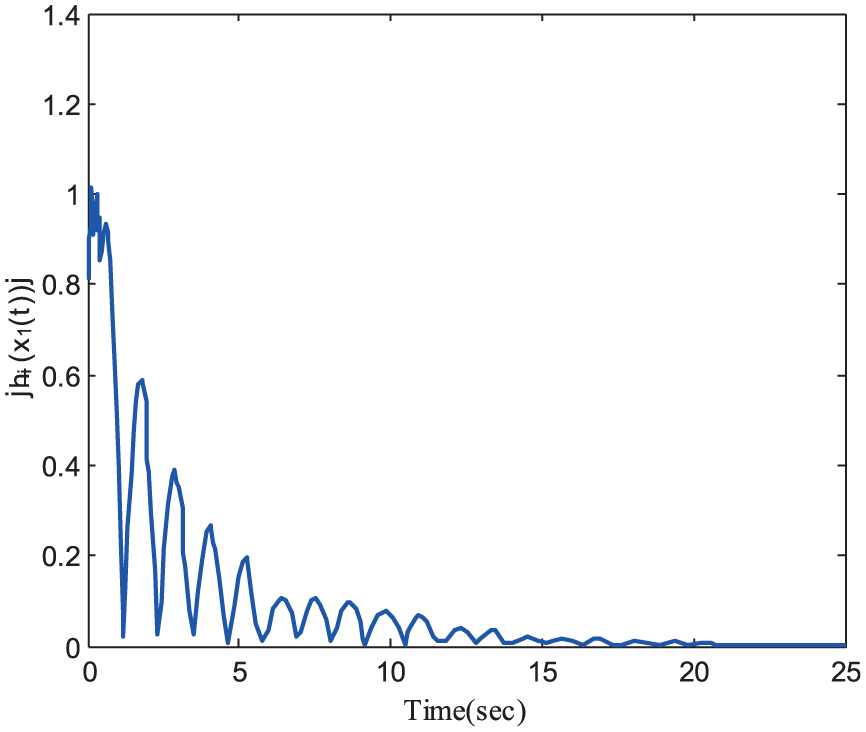
The time-derivative of membership functions are defined as
And the evolution of the time-derivative of membership functions shown in Figure 8 allows us to verify that the assumption is verified.
Evolution of
Conclusions
In this paper, the problem of observer-based robust control for uncertain FMJS has been discussed. Based on a mode-dependent fuzzy Lyapunov function and LMI technique, by introducing slack matrix variables, a design approach of observer-based robust controller is presented in terms of solvability of a set of LMIs. The resulting LMIs can be solved to obtain the controller gains as well as the observer gains by convex optimization techniques. Furthermore, in order to compare with the proposed approach, we use the common stochastic Lyapunov function to solve the same problem. The numerical example illustrates that the fuzzy Lyapunov function can reduces the conservatism and improves the performance of the system, the designed robust controller achieves good results. Future work will further study the FMJSs via fuzzy Lyapunov function approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China under Grant 61403167.
References
1.
AbolmasoumiAHMomeniHR (2011) Robust observer-based control of a Markovian jump system with different delay and system modes. International Journal of Control, Automation and Systems9(4): 768–776.
2.
AsemaniMHMajdVJ (2013) A robust observer-based controller design for uncertain T–S fuzzy systems with unknown premise variables via LMI. Fuzzy Sets & Systems212(1): 21–40.
3.
AssawinchaichoteWNguangSK (2007) Robust state-feedback control for uncertain fuzzy Markovian jump systems: LMI-based design. International Journal of Computational Intelligence2007(3): 187–194.
4.
BoukasEKShiPNguangSK (2003) Robust control for linear Markovian jump systems with unknown nonlinearities. Journal of Mathematical Analysis & Applications282(1): 241–255.
5.
ChangXHYangGH (2010) Relaxed stabilization conditions for continuous-time Takagi-Sugeno fuzzy control systems. Information Sciences180(17): 3273–3287.
6.
ChenGCShenY (2012) Robust reliable control for nonlinear stochastic Markovian jump systems. Mathematical Problems in Engineering20(1): 22–31.
7.
ChenJLiuF (2007) New design approach of robust control for uncertain fuzzy Markovian jump systems. Journal of Dynamic Systems Measurement & Control Transactions of the ASME128(3): 675–680.
8.
De SouzaCE (2006) Robust stability and stabilization of uncertain discrete-time Markovian jump linear systems. IEEE Transactions on Automatic Control51(5): 836–841.
9.
DongJYangGH (2007) An LMI-based approach for state feedback controller design of Markovian jump nonlinear systems. In: 16th IEEE International Conference on Control Applications, Singapore, 1–3 October 2007, pp. 1516–1521. Piscataway, NJ: IEEE.
10.
KchaouMHajjajiAEToumiA (2015) Non-fragile output feedback control design for continuous-time fuzzy systems. ISA Transactions54: 3–14.
11.
KimSHParkPG (2009) Observer-based relaxed control for fuzzy systems using a multiple Lyapunov function. IEEE Transactions on Fuzzy Systems17(2): 477–484.
12.
LiLLiuXDChaiTY (2009) New approaches on control of T-S fuzzy systems with interval time-varying delay. Fuzzy Sets & Systems160(12): 1669–1688.
13.
LinCWangQGTongHL (2005) Improvement on observer-based control for T-S fuzzy systems. Automatica41(9):1651–1656.
14.
LiuXDZhangQL (2003) New approaches to controller designs based on fuzzy observers for T-S fuzzy systems via LMI. Automatica39(9): 1571–1582.
15.
MaYCChenM (2017) Non-fragile state feedback control for singular Markovian jump fuzzy systems with interval time-delay. International Journal of Machine Learning & Cybernetics8(4): 1223–1233.
16.
MaYCJiaXRYanYF (2018) Observer-based control for nonlinear Markovian jump systems with time-delay and input saturation. Computational & Applied Mathematics: 37(1): 255–275.
17.
MaritonM (1990) Jump Linear Systems in Automatic Control. New York: Marcel-Dekker.
18.
MozelliLAPalharesRMAvellarGSC (2009) A systematic approach to improve multiple Lyapunov function stability and stabilization conditions for fuzzy systems. Information Sciences179(8): 1149–1162.
19.
SadeghiMSRezaeiMMardanehM (2015) Affine parallel distributed compensator design for affine fuzzy systems via fuzzy Lyapunov function. Engineering Applications of Artificial Intelligence37(37): 407–416.
20.
TakagiTSugenoM (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems Man & Cybernetics15(1): 387–403.
21.
TanakaKHoriTWangHO (2001) A fuzzy Lyapunov approach to fuzzy control system design. In: Proceedings of American Control Conference, pp. 4790–4795.
22.
TanakaKHoriTWangHO (2003) A multiple Lyapunov function approach to stabilization of fuzzy control systems. IEEE Transactions on Fuzzy Systems11(4): 582–589.
23.
WangJWLuoYS (2008) Robustly stochastic stability criteria for Takagi-Sugeno fuzzy Markov jump system. In: International Conference on Innovative Computing Information and Control, Dalian, China, 18–20 June 2008, pp. 501–504. Piscataway, NJ: IEEE.
24.
WangJWWuHNGuoLet al. (2013) Robust fuzzy control for uncertain nonlinear Markovian jump systems with time-varying delay. Fuzzy Sets & Systems212(212): 41–61.
25.
WangLKZhangHGLiuXD (2016) Observer design for continuous-time Takagi-Sugeno fuzzy model with unknown premise variables via nonquadratic Lyapunov function. IEEE Transactions on Cybernetics46(9): 1986–1996.
26.
WuHNCaiKY (2006) Mode-independent robust stabilization for uncertain Markovian jump nonlinear systems via fuzzy control. IEEE Transactions on Systems Man & Cybernetics, Part B (Cybernetics)36(3): 509–519.
27.
ZhengQXZhangHB (2016) Asynchronous fuzzy control for a class of switched nonlinear systems via switching fuzzy Lyapunov function approach. Neurocomputing182(2016): 178–186.