This paper uses the linear matrix inequality dilation approach to deal with robust stability and H∞ dynamic output feedback controller synthesis for linear parameter varying delayed systems with variable delay. This approach can express the original non-convex problem in terms of convex linear matrix inequalities and consequently reduces the conservatism of linear matrix inequality synthesis without dilation. Both delay-dependent stability and H∞ performance are studied in a quadratic context. Furthermore, a Lyapunov–Krasovskii functional is used to derive a delay-dependent criterion formulated in terms of a linear matrix inequality that will be used to search for an H∞ linear parameter varying delayed dynamic output feedback controller. To achieve this aim we use an integral inequality which plays a key role in the derivation of this criterion and enables the reduction of the H∞ cost in comparison to other results.
The stability criteria can be classified into two classes according to the dependence or non-dependence of the criteria on the size of the delay. The delay-independent criteria are more conservative than the delay dependent ones.
In other fields of research, linear parameter varying (LPV) systems have been studied intensively (Onat et al., 2009; Seron and De Doná, 2015; Xia and Eisaka, 2004; Yingbo et al., 2016) because they can be regarded as a particular type of nonlinear system. Therefore, the first control strategy for these systems was based on a gain scheduling adaptive methodology (Rugh and Shamma, 2000; Shamma and Athans, 1991). This strategy provides a reasonable compromise between performance and robustness at the expense of higher complexity and stability problems in the switching zones. In order to obtain guarantees of stability and performance against dependent parameters, another approach based on the concept of parameter-dependent controllers has been investigated (Daafouz et al., 2008; Wu, 2001; Xie, 2008). The sought controller has the same dependence on the time-varying parameters as the plant. Thus, the performances are higher than those obtained with a classical Linear Time Invariant controller because conservatism is reduced. At this level, significant progress has been made in this area, notably in the development of linear matrix inequality (LMI) techniques which allowed for the formulation of the analysis problem and the synthesis of the controller in terms of LMI problems.
Most LMI characterizations in the quadratic theory involve the product of the Lyapunov variables with the controller’s. This enforces a particular (and restrictive) choice of Lyapunov variables in order to get around bilinearities. To reduce the conservatism generated by this method (Ebihara and Hagiwara, 2005; Oliveira and Peres, 2005) showed that dilation of the LMI characterizations helps to avoid the restriction of using a common Lyapunov variable.
Motivated by the LPV control theory, many reports (He et al., 2004; Zhang et al., 2002, 2014) deal with the analysis and control of LPV time-delay systems using the Lyapunov–Krasovskii functional. To the best of the authors’ knowledge, only the analysis and the state feedback problem have been investigated (Briat et al., 2009; Wu and Grigoriadis, 2001). However, the output feedback control problem in LPV time-delay systems remains open and major improvements are still expected to be made. This paper examines the delay-dependent stability and H∞ output feedback control of LPV time-delay systems.
The main contributions of this paper are as follows.
We provide a new type H∞ output feedback control and develop a less conservative delay-dependent stability for LPV time-delay systems based on the approach of Briat et al. (2013).
We propose a general approach for the dilated LMI characterizations.
Additionally, to analyse the stability of LPV delay systems and to provide a delay-dependent criterion, we choose a Lyapunov–Krasovskii functional so that its derivative has an explicit dependence on the maximal value of the system delay considered to be variable. The derived condition is expressed in the LMI framework and is broadened to take into account an H∞ performance. This is the purpose of section ‘Analysis of LPV time-delay systems’. In section ‘H∞ dynamic output feedback’ we deal with the problem of the H∞ dynamic output feedback control of LPV delayed systems. The sought controller is itself LPV delayed as it has the same dependence on the varying parameters as the system to be controlled. We use the dilated LMI approach to reduce the conservatism of the method as much as possible. The section named ‘Numerical example’ provides a numerical example to illustrate the results. Finally, we conclude the paper in the final section.
Analysis of LPV time-delay systems
This section focuses on the stability analysis of LPV time-delay systems with an H∞ constraint.
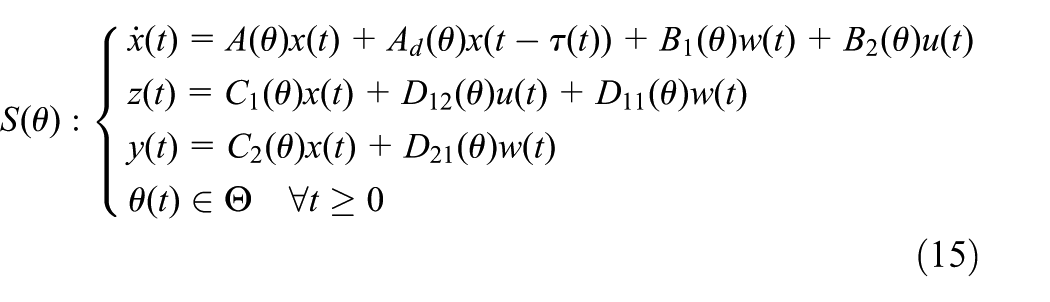
We consider the following state-space model of an LPV time-delay system
where , , , and are the system state, the delayed state, the external disturbance, the controlled output and the functional initial condition, respectively.
The system matrices , , , and are parameter dependent matrices of compatible dimensions of a time-varying parameter such that .
Moreover, we assume that the following is true.
The state space matrices , , , and are continuous and bounded functions and depend linearly on .
The real parameter vector that can be identified by online measurement values varies in a polytope as
with being the number of the polytope vertices.
We have because each parameter varies between two values and for .
For example, if then we have vertices
The matrix inputs are dependent on a time-varying parameter which belongs to the operating domain of the system , so that the LPV system is described through a polytopic model. Let
where are time invariant and belong to unitary simplex defined by
We provide here a result of the stability for LPV time-delay systems with H∞ constraint using the method defined by Briat et al. (2013).
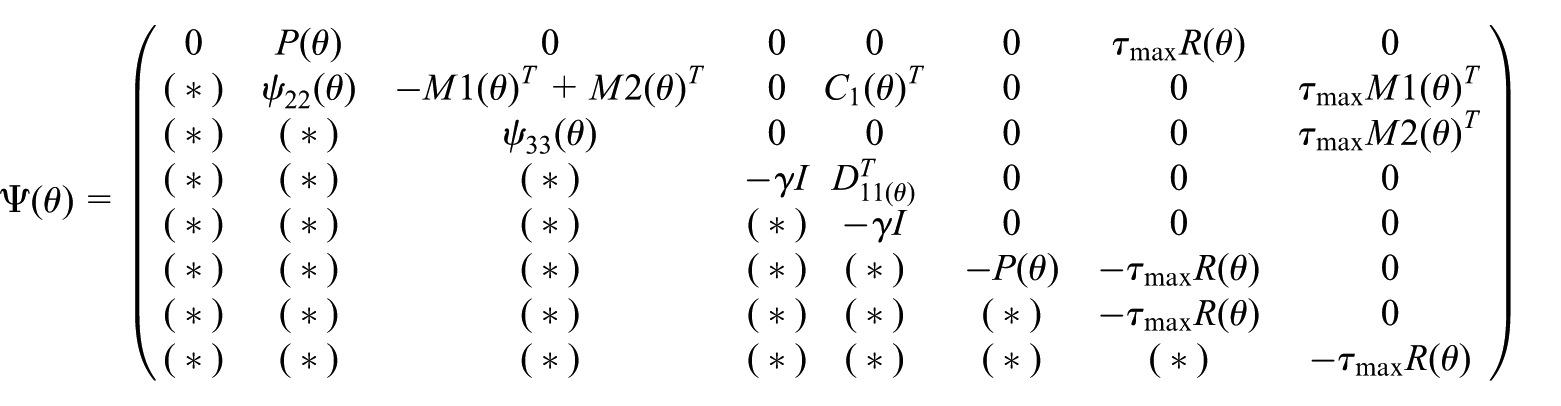
Theorem 1: System (1) is robustly asymptotically stable for any dependent time delay satisfying both and if there exist positive-definite matrices , , and matrices , such that for all
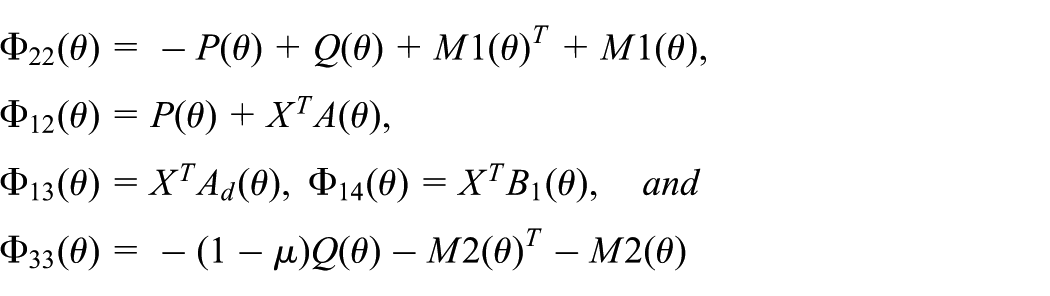
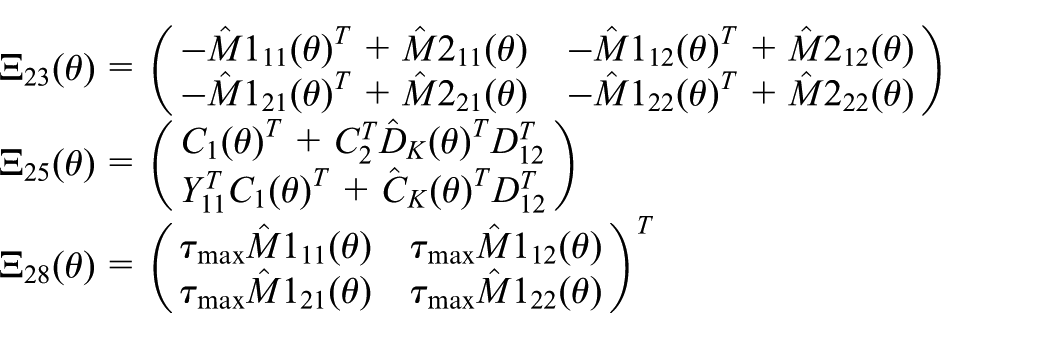
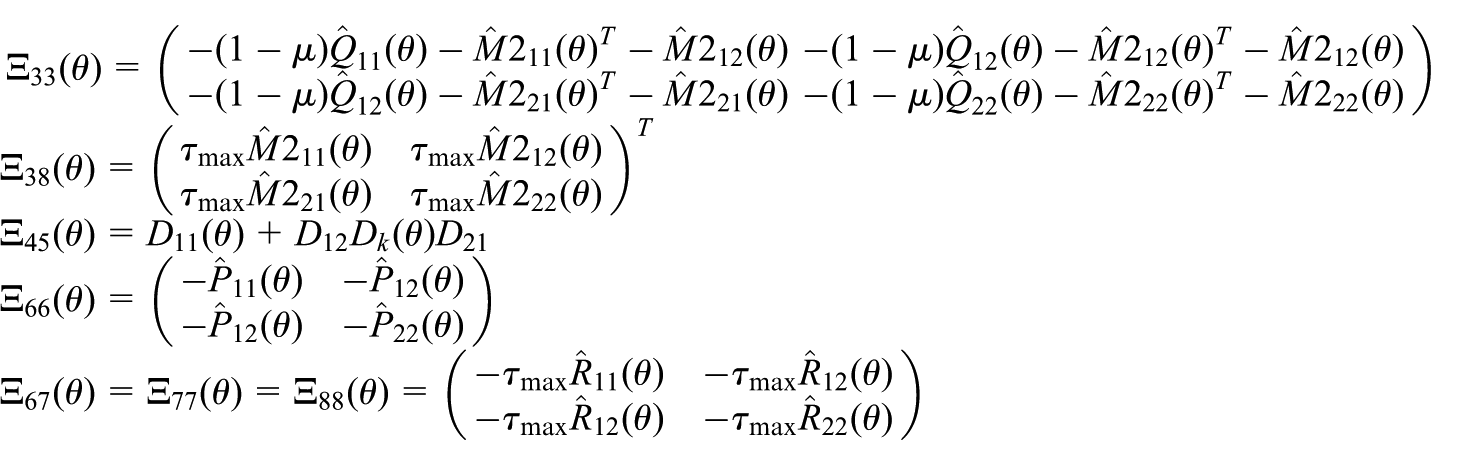
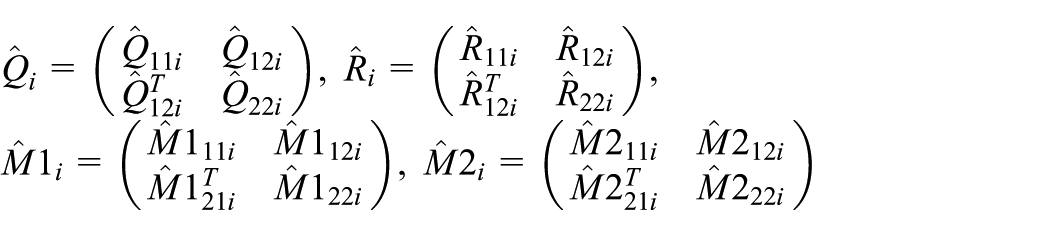
with
where is an upper bound of the delay derivative , .
To prove this theorem, we use the following Lemma 1 that gives an integral inequality, helping in the derivation of both the analysis and synthesis criteria.
Lemma 1 (Zhang et al., 2005): Let be a vector-valued function with first-order continuous-derivative entries. Then, the following integral inequality holds for any matrices ), and , and a scalar function
where
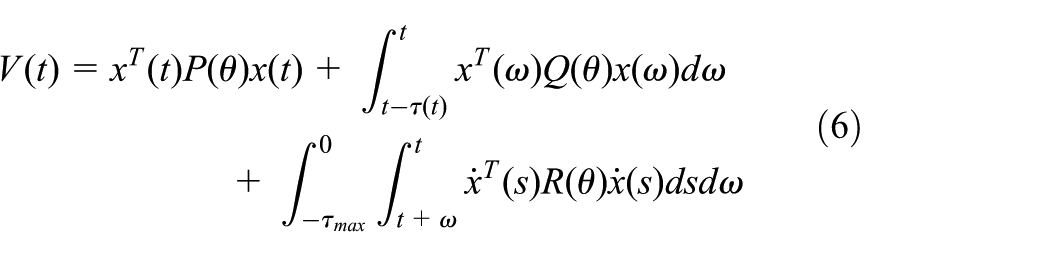
Proof (of Theorem 1): The main result of the stability analysis of LPV time-delay systems is based on the use of the following parameter-dependent Lyapunov–Krasovskii functional
where , and are positive-definite matrices that need to be determined.
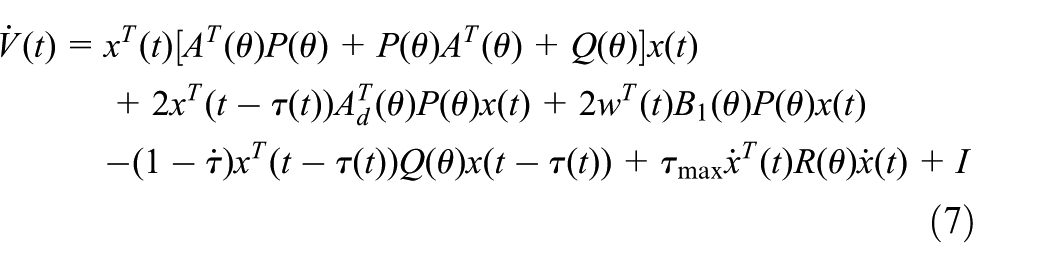
Calculating the derivative of along the trajectories of the solutions of system (1) leads to
with
Note that .
Using Lemma 1 we have
with
The criterion , which characterizes the -gain from to to be minimized, is considered as
performances are introduced in the criteria through the Hamiltonian function defined by
The derivative of the function can be bounded from above by
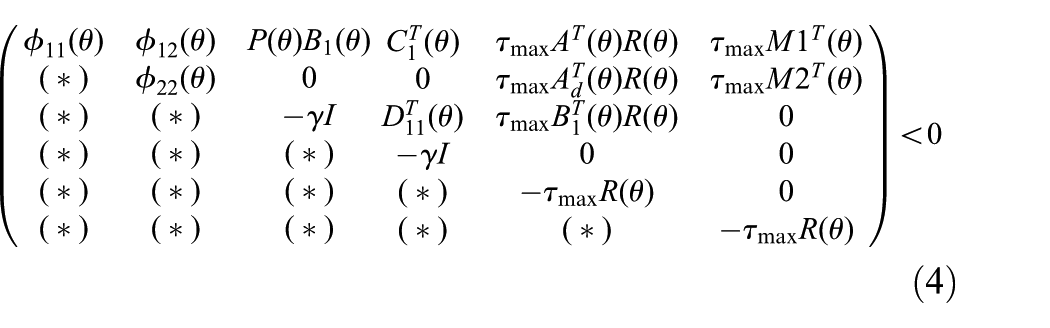
Next, expanding the expression of into the expression of and performing a Schur complement, we obtain LMI (4).
Obviously (4) is not linear in the terms , ), and . Usually, this problem is bypassed by using a constant Lyapunov matrix function. However, this method is very conservative. That is why the LMI dilation approach can be used to reduce this conservatism.
This technique applied to the result of Theorem 2 leads to a less conservative criterion.
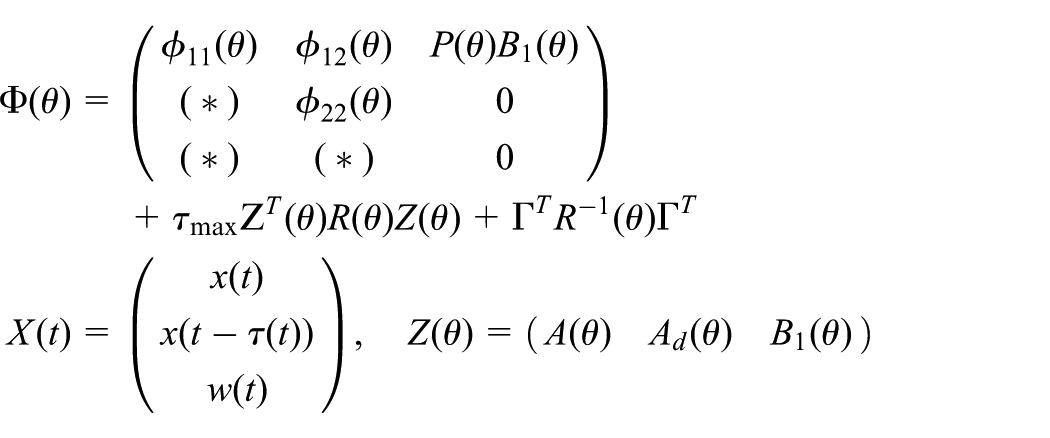
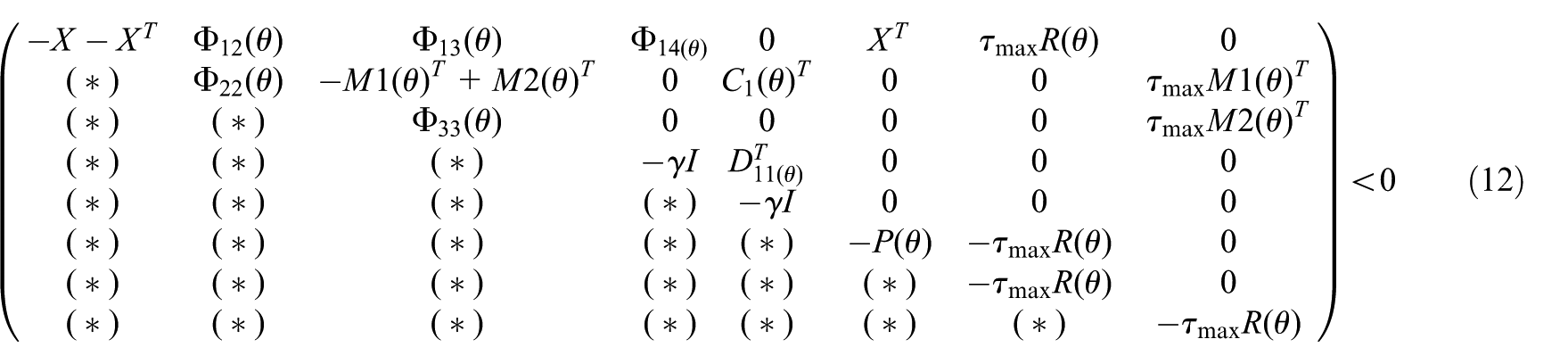
Theorem 2: System (1)is robustly asymptotically stable for any dependent time delay satisfying both and if there exist positive-definite matrices , , , matrices , and such that for all
Let the LPV time-delay system with state-space realization
where , , , , are the state, the exogenous noise input, the control, the controlled output and the measured output vectors, respectively. The matrix entries are dependent on a time-varying parameter vector which belongs to the operating domain of the system . The system can be defined via a matrix polytope with summits
and is determined by its barycentric coordinates
The problem addressed in this section is to find, over all trajectories , an LPV dynamic output feedback controller that:
asymptotically stabilizes the system (15);
provides a guaranteed performance attenuation gain from to satisfying .
H∞ dynamic output feedback synthesis
In this part, our goal is to look for an output-feedback controller of the form
We choose the same polytopic structure for the controller as the system; that is
with .
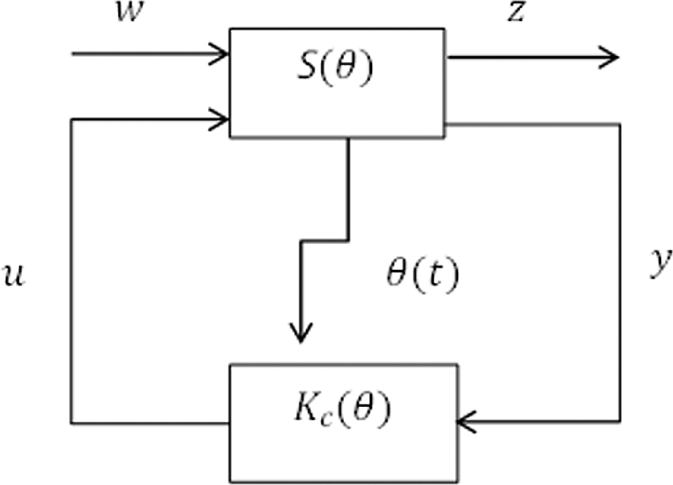
We recall that each online measure of corresponds to a combination of as its barycentric coordinates in the polytope . These coordinates will be the same as those used to determine the controller as shown by the control schema of Figure 1.
LPV control.
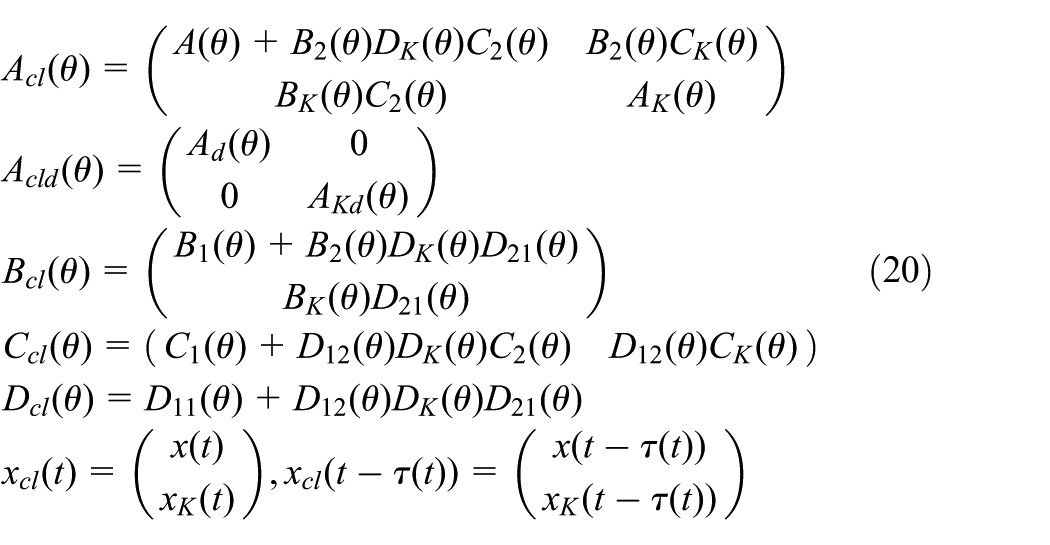
The state space representation of the closed-loop system is
with
Clearly, these matrices are bilinear with respect to the parameters of the controller .
To avoid this bilinearity, we can assume that the input and output matrices are invariant (Apkarian et al., 1995).That is: and .
The desired characterization for dynamic output feedback synthesis can be derived in the following steps:
1) We introduce a partition of in (12) and its inverse in the form
with and . Assuming that and are invertible, we then introduce the notation
and are invertible matrices which readily verify the identity
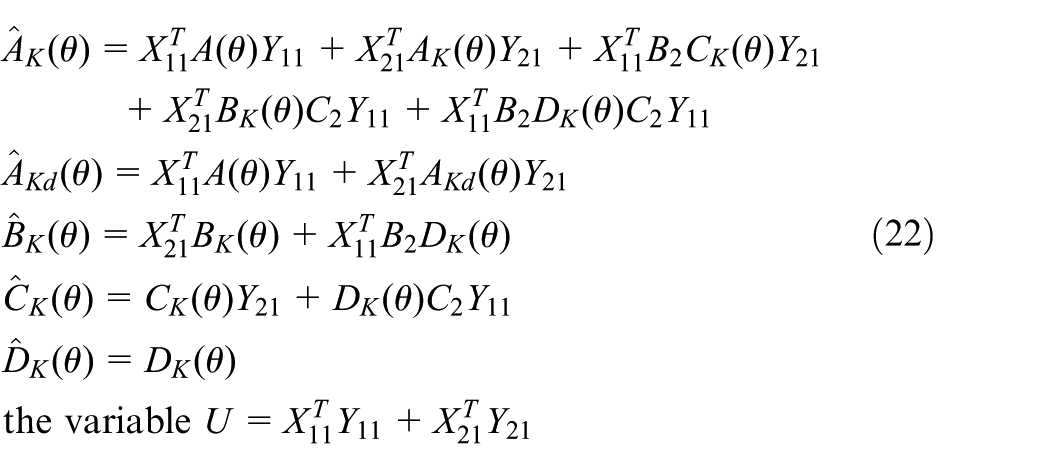
2) Now we define the change in the controller variables as follows
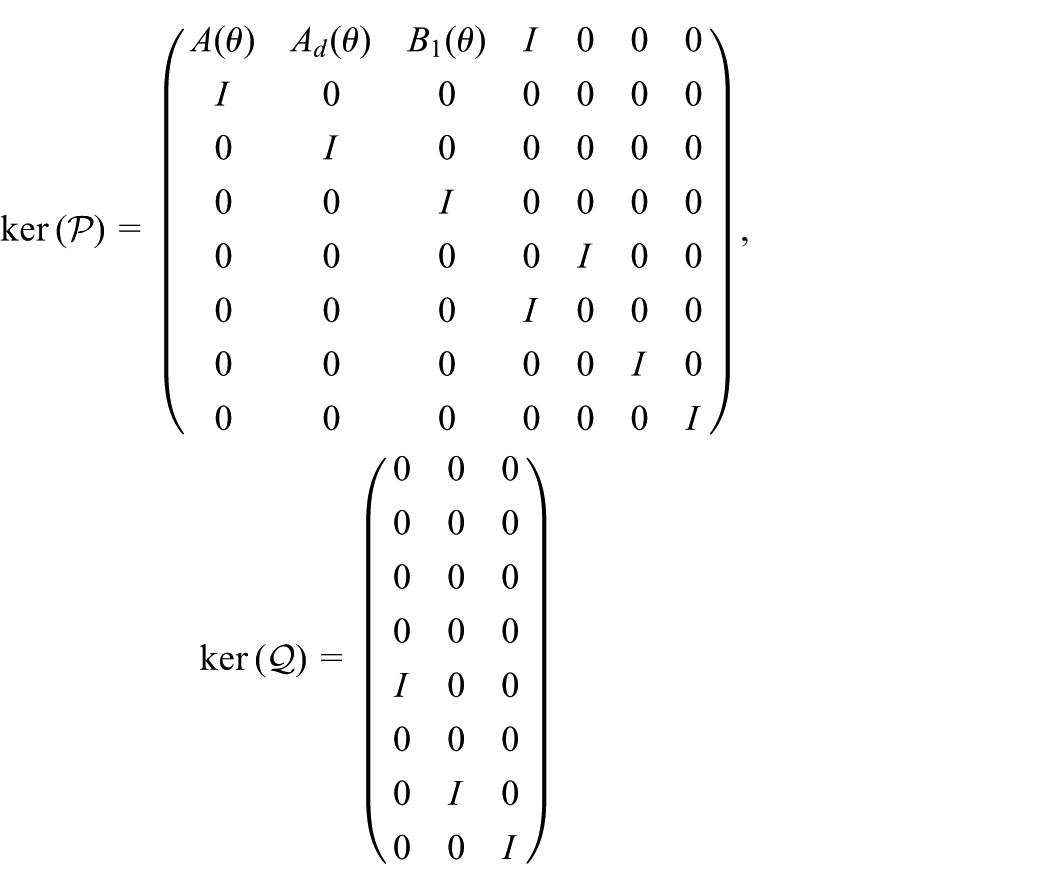
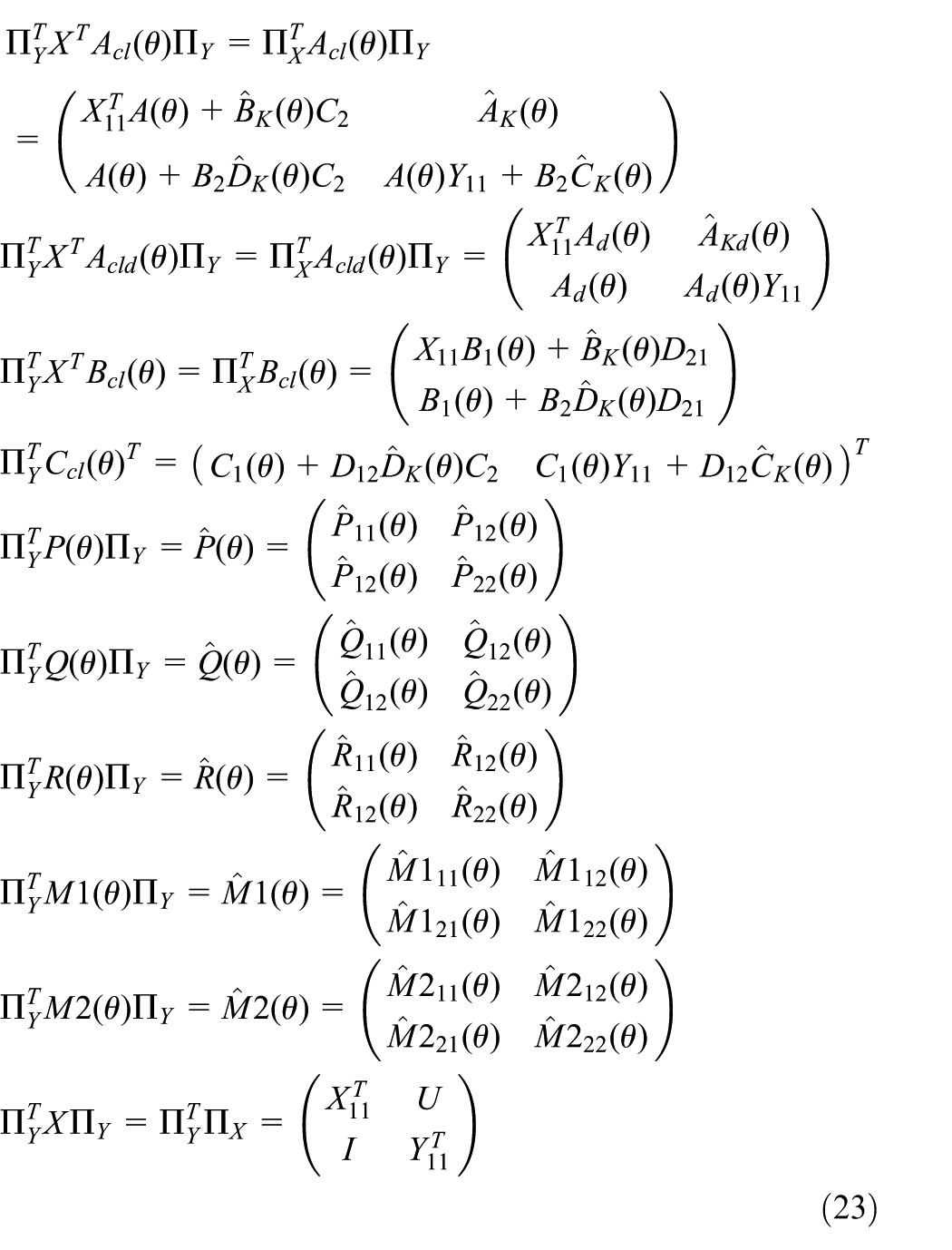
3) Then we apply the LMI (12) of Theorem 2 for the closed-loop system (19) and we made the congruence by
This congruence leads to a matrix inequality which involves the terms
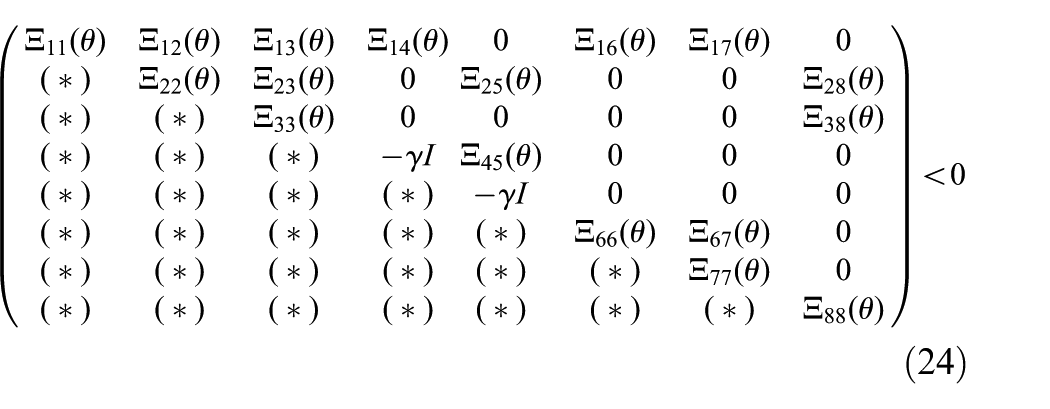
This leads to the following convex problem with linear constraints
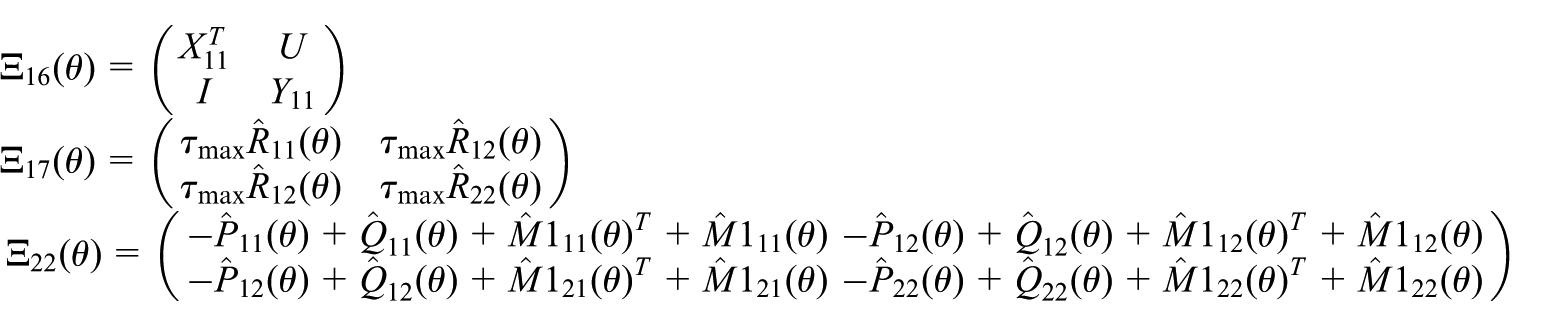
with
4) Finally, we can determine the variables , , , , , , , , , , and by solving LMI (24) with
Once these variables are determined, we can reconstruct the controller as follows:
compute the two matrices and by the following factorization
compute the controller data , , , and by reversing the formulas in (22).
Numerical example
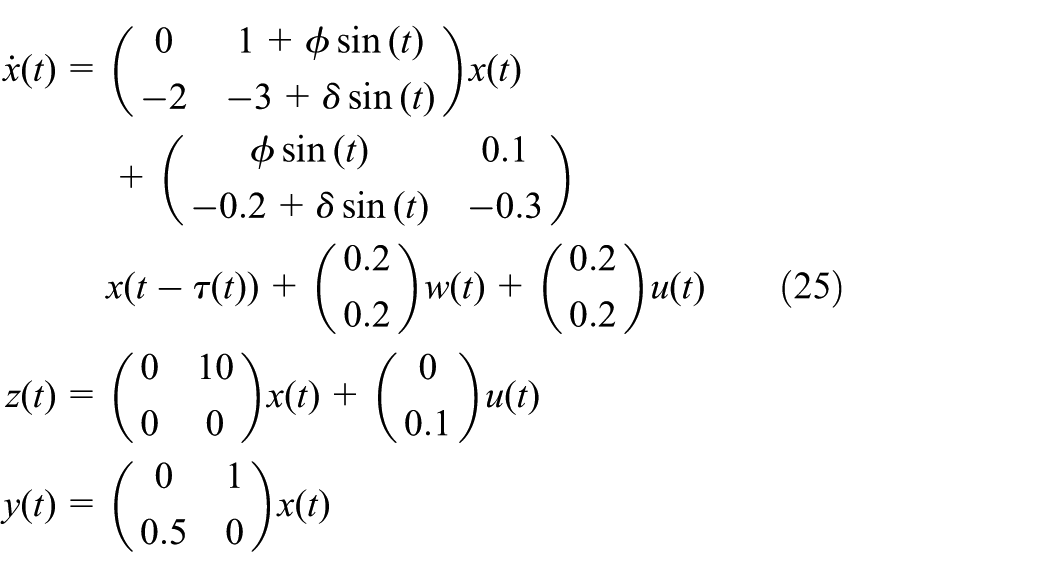
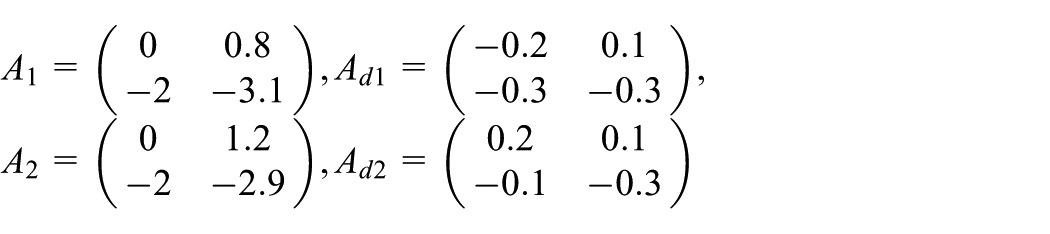
Here, we consider the LPV time-delay system (25) defined by (Briat et al., 2009)
where and . Define as a varying parameter which varies in the following uncertainty range: .
This leads to a polytopic system with two vertices
With
We follow the procedure detailed in subsection ‘H∞ dynamic output feedback synthesis’ to derive an H∞ dynamic output feedback problem.
The solution of the LMIs (24) leads to a performance level for the time delay =0.5 and . The same system is state feedback controlled with H∞ performance in Briat et al. (2013) and Zhang and Grigoriadis (2005). Their methods lead to a performance level and , respectively. Hence, for this example, the control method presented in this paper provides a lower and better H∞ performance level.
According to our design method, the maximum obtained delay is and the maximum delay variation rate is , while based on the method in Zhang and Grigoriadis (2005) the maximum obtained delay is 1.65 and the maximum delay variation rate is . Thus, our results can provide the controller with a wider delay range than those in Zhang and Grigoriadis (2005).
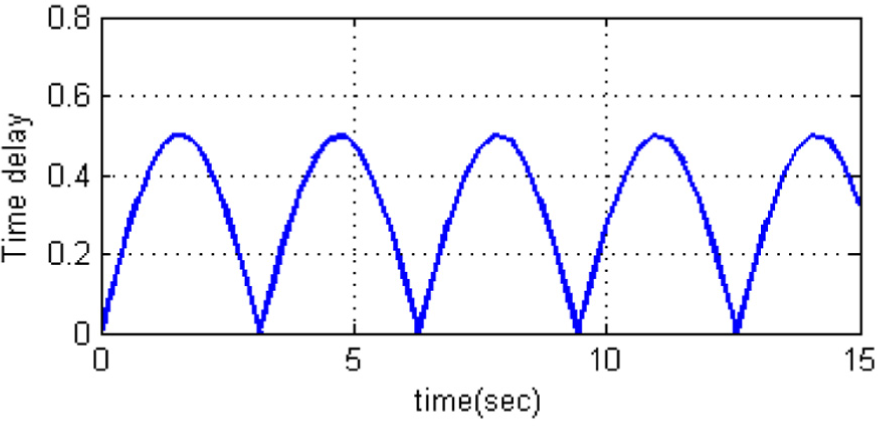
In the simulation, we choose and the maximum delay variation rate is . Figure 2 describes the time-delay evolution.
Delay .
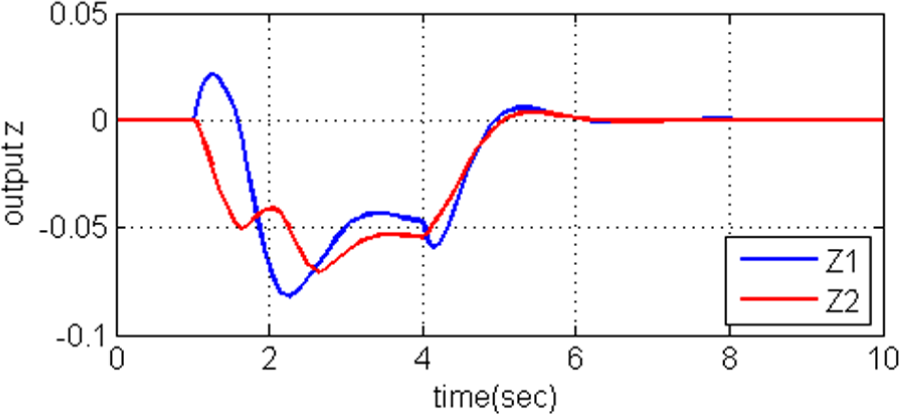
The external disturbance is a rectangular signal defined as follows
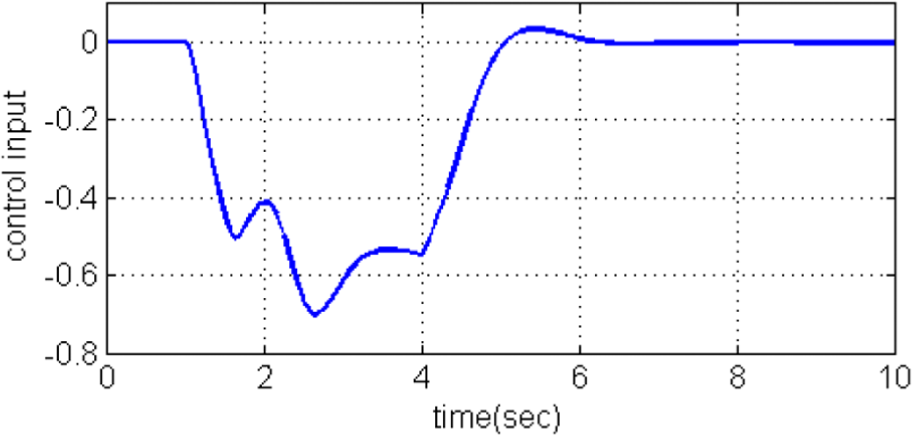
For this disturbance , we simulate the closed-loop behaviour of the system using the LPV dynamic output feedback controller. The system responses and control input profiles are shown in Figures 3 and 4. Note that both responses , converge to zero very rapidly.
The system responses evolution , ().
Control input evolution ().
Conclusion
This paper examined the robust stability and H∞ dynamic output feedback control synthesis for LPV delayed systems. A new LMI representation to H∞ performance analysis and dynamic output feedback control synthesis has been presented for the LPV delayed system using a parameter-dependent Lyapunov–Krasovskii functional and Jensen’s inequality; an approach which has proven its efficiency. Moreover, this approach involves an additional variable and avoids the product of the Lyapunov matrices and the system matrices. This allows us to find a linearising change of variable for the stabilization problem. The results in this paper are less conservative and can provide a controller with a wider delay range and a better quadratic performance level for the LPV system with rate bounded time-varying state delays. In future work, we will consider the nonlinear delayed system and design an output-feedback controller for this type of system.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
1.
ApkarianPBiannicJMGahinetP (1995) Self scheduled H∞ control of missile via linear matrix inequalities. Journal of Guidance, Control and Dynamics18(3): 532–538.
2.
ApkarianPTuanHDBernussouJ (2001) Continuous-time analysis, eigenstructure assignment, and H2 synthesis with enhanced linear matrix inequalities (LMI) characterizations. IEEE Transactions on Automatic Control46(12): 1941–1946.
3.
BeibeiXDiyiCHaoZet al. (2015) Dynamic analysis and modeling of a novel fractional-order hydro-turbine-generator unit. Nonlinear Dynamics81(3): 1263–1274.
4.
BeibeiXDiyiCHaoZet al. (2017) Hamiltonian model and dynamic analyses for a hydro-turbine governing system with fractional item and time-lag. Communications in Nonlinear Science and Numerical simulation47: 35–47.
5.
BriatCSenameOLafayJ (2009) Delay-scheduled state-feedback design for time-delay systems with time-varying delays: A LPV approach. Systems and Control Letters58(9): 664–671.
6.
BriatCSenameOLafayJ (2013) Memory resilient gain-scheduled state-feedback control of uncertain LTI/LPV systems with time-varying delays. Systems and Control Letters59(8): 451–459.
7.
ChengWYiS (2014) Delay-dependent robust H∞ control for uncertain stochastic systems with time-varying delays in state and control input. Journal of Systems and Control Engineering228(8): 565–577.
8.
ChilaliMGahinetP (1996) H∞ design with pole placement constraints: An LMI approach. IEEE Transactions on Automatic Control41(3): 327–354.
9.
ChoiHDAhnCKLimMTet al. (2016) A dynamic output-feedback H∞ control for active half-vehicle suspension systems with time-varying input delay. International Journal of Control, Automation and Systems14(1): 59–68.
10.
DaafouzJBernussouJGeromelJC (2008) On inexact LPV control design of continuous-time polytopic systems. IEEE Transaction on Automatic Control53(7): 1674–1678.
11.
EbiharaYHagiwaraT (2004) New dilated LMI characterizations for continuous-time multiobjective controller synthesis. Automatica40(11): 2003–2009.
12.
EbiharaYHagiwaraT (2005) A dilated LMI approach to robust performance analysis of linear time-invariant uncertain systems. Automatica41(11): 1933–1941.
13.
GahinetPApkarianP (1994) A linear matrix inequality approach to H∞ controls. International Journal of Robust and Non Linear Control4(4): 421–448.
14.
HeYWuMSheJHet al. (2004) Parameter-dependent Lyapunov functional for stability of time-delay systems with polytopic-type uncertainties. IEEE Transactions On Automatic Control49(5): 828–832.
15.
HongminLXinyongW (2016) Adaptive tracking control for a class of uncertain switched nonlinear systems with time-delay. Transactions of the Institute of Measurement and Control74(14): 1447–1455.
16.
KaoCRantzerA (2007) Stability analysis of systems with uncertain time-varying delays. Automatica43(6): 959–970.
17.
LiHJingXKarimiHR (2014) Output-feedback based H∞ control for vehicle suspension systems with control delay. IEEE Transactions on Industrial Electronics61(1): 436–446.
18.
OliveiraRPeresP (2005) Stability of polytopes of matrices via affine parameter-dependent Lyapunov functions: Asymptotically exact LMI conditions. Linear Algebra and its Applications405(28): 209–228.
19.
OnatCKucukdemiralIBSivriogluSet al. (2009) LPV gain-scheduling controller design for a non-linear quarter-vehicle active suspension system. Transactions of the Institute of Measurement and Control31(1): 71–95.
20.
ParkPGLeeWILeeSY (2015) Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. Journal of the Franklin Institute352(4): 1378–1396.
21.
RughWJShammaJS (2000) Research on gain scheduling. Automatica36(10): 1401–1425.
22.
SchererCGahinetPChilaliM (1997) Multiobjective output-feedback control via LMI optimization. IEEE Transactions on Automatic Control42(7): 896–911.
23.
SeronMMDe DonáJA (2015) Robust fault estimation and compensation for LPV systems under actuator and sensor faults. Automatica52: 294–301.
24.
ShammaJAthansM (1991) Guaranteed properties of gains scheduled control for linear parameter-varying plants. Automatica27(3): 559–564.
25.
SuplinVFridmanEShakedU (2006) H∞ control of linear uncertain time-delay systems: A projection approach. IEEE Transactions on Automatic Control51(3): 680–685.
26.
TuanHApkarianPNguyenT (2001) Robust and reduced order filtering: New LMI-based characterizations and methods. IEEE Transactions on Signal Processing49(12): 2875–2984.
27.
TuanHApkarianPNguyenT (2003) Robust filtering for uncertain non linearly parametrized plants. EEE Transactions on Signal Processing51(7): 1806–1815.
28.
WuF (2001) A generalized LPV system analysis and control synthesis framework. International Journal of Control74(7): 745–759.
29.
WuFGrigoriadisKM (2001) LPV systems with parameter-varying time delays: Analysis and control. Automatica37(2): 221–229 .
30.
XieW (2008) New LMI-based condition for quadratic stabilization of LPV system. Journal of Inequalities and Application2008: 563845, 12 p.
31.
XieWEisakaT (2004) Design of LPV control systems based on Youla parameterization. IET Control Theory & Applications151(4): 465–472 .
32.
XiaYJiaY (2003) Robust control of state delayed systems with polytopic type uncertainties via parameter-dependent Lyapunov functionals. Systems and Control Letters50(3): 183–193.
33.
YingboHJingNXingWet al. (2016) Robust adaptive control for vehicle active suspension systems with uncertain dynamics. Transactions of the Institute of Measurement and Control31(9): 1251–1261.
34.
ZhangFGrigoriadisK (2005) Delay-dependent stability analysis and H∞ control for state-delayed LPV system. In: Mediterranean conference on control and automation, Limassol, Cyprus, 27–29 June 2005, pp.1532–1537. IEEE.
35.
ZhangXTsiotrasPKnospeC (2002) Stability analysis of LPV time-delayed systems. International Journal of Control75(7): 538–558.
36.
ZhangXMWuMSheJHet al. (2005) Delay-dependent stabilization of linear systems with time-varying state and input delays. Automatica41(8): 1405–1412.
37.
ZhangYYangFHanQL (2014) H∞ control of LPV systems with randomly multi-step sensor delays. International Journal of Control, Automation, and Systems12(6): 1207–1215.
38.
ZhongQ (2006) Robust Control of Time-Delay Systems. London: Springer–Verlag.