This paper considers the distributed control problem of nonholonomic mobile agents with input delay to track a target. In contrast to the existing works in which some controllers have been designed for ideal conditions, the destructive factor of input delay is considered in the dynamics of the agents in this work. At first, a distributed controller is suggested for each agent to track the target in the absence of input delay. In this case, each nonholonomic mobile agent is divided into two subsystems and two terminal sliding mode controllers are designed for the two subsystems. Based on the proposed controllers, a switching control strategy is obtained to guarantee the finite time tracking control of nonholonomic mobile agents. Then, this controller is extended based on a future state estimator for tracking control in the presence of input delay. The stability analysis of distributed controllers and estimator is also provided. Simulation results illustrate the effectiveness of the suggested algorithms.
In the recent decade, the tracking control problem of multi-agent systems (MASs) has attracted researchers’ interest because of its successful applications in different areas including formation control, consensus control, flocking, cooperative control and so on (Chen et al., 2016; Franchi et al., 2016; Hausman et al., 2015; Jiang et al., 2015; Li, 2015; Wang et al., 2014; Xia et al., 2014). Tracking control of MASs includes two aspects of estimation and control. The estimation aspect plans to design a distributed estimator for each agent to estimate the states of the target. The control aspect aims to design distributed controller for every agent to track the estimated states of the target. In both aspects, distributed algorithms should be designed so that the states of every agent can agree on a common value with their neighbors.
The tracking control problem of MASs can be considered in two categories of linear and nonlinear dynamics. Most of the existing works on tracking control focus on MASs with linear dynamics, while practical MASs usually have nonlinear dynamics with nonholonomic constraints. Thus, it is important to study tracking control of nonholonomic agents. In Yu and Liu (2016), the formation control problem of nonholonomic MASs with directed communication graph has been solved. The suggested controller in Yu and Liu (2016) ensures that all agents move along a common circle. Dong and Djapic (2016) proposed distributed state feedback control laws for nonholonomic MASs such that states of each agent converge to the states of a target with an exponential rate. This paper has also extended the results for MASs with time-varying communication graph. Cao et al. (2017) has introduced some distributed controllers for multiple nonholonomic mobile robots such that the mobile robots can move along a desired trajectory with some desired formation. In Zhao et al. (2017), two controllers have been presented so that nonholonomic MAS can track a target with unknown dynamics in a flocking manner for both fixed and switching topologies. The proposed controllers guaranteed collision avoidance among agents. Yang et al. (2017) has solved two problems of tracking control and rendezvous for multiple nonholonomic agents in the presence of unknown disturbances. In this work, a disturbance estimator is used in each agent to degrade the effect of unknown disturbances. In Liu et al. (2017), a sampled-data control law has been introduced for agents with nonholonomic dynamics to track a mobile target. This paper designed a dwell time for the feasibility of processing and information sensing to prevent chattering caused by abrupt changes of the neighbor relations.
In the recent decade, study of the chained-form of nonholonomic systems has absorbed great attentions because any kinematic model of nonholonomic systems is included in this form. In fact, Murray and Sastry (1993) has showed that nonholonomic systems can be transformed into the chained-form by input and state transformations. For instance, unicycles and cars with trailers that have three states and two inputs can be converted into the first order chained-form nonholonomic system. There exist some papers that have studied the tracking control problem of chained-form nonholonomic systems (Cao et al., 2015; Du et al., 2015; Mobayen, 2015). Mobayen (2015) has presented a recursive terminal sliding mode strategy to solve finite time tracking control problem of chained-form nonholonomic systems. In Du et al. (2015), a finite time observer-based controller has been proposed for high order nonholonomic MASs to ensure finite time convergence of the agents to a target with nonholonomic dynamics. Cao et al. (2015) has suggested some controllers for chained-form nonholonomic MASs with directed communication graph so that agents can track a target with chained-form nonholonomic dynamics. It should be noted that Mobayen (2015) has introduced a tracking control algorithm for a single nonholonomic system that cannot be used for chained-form nonholonomic MASs. Moreover, Du et al. (2015) and Cao et al. (2015) have assumed that at least one of the agents is connected to the targets. This assumption does not hold in the tracking control problem and hence the proposed algorithms in Du et al. (2015) and Cao et al. (2015) cannot be applied for tracking control of chained-form nonholonomic MASs.
In reality, delay is inevitable in practical MASs and degrades performance of the system and may lead to instability. There exist two types of delays in MASs: communication delay and input delay. Communication delay is related to communication among agents while input delay is related to processing and connecting time for the packets arriving at each agent. In Shang et al. (2016), the stabilization problem has been solved for chained-form nonholonomic systems with input delay. In this work, a controller has been suggested based on input-state-scaling technique and the backstepping approach to ensure asymptotically stability of the closed-loop system. The suggested control law in Shang et al. (2016) is not a distributed controller and cannot be used for tracking control of chained-form nonholonomic MASs. It is worth noting that although the presented algorithm in Dong and Djapic (2016) is a distributed control law, it has been suggested for dynamic form of nonholonomic MASs with input delay and cannot be utilized for the chained form of nonholonomic MASs with input delay. Based on these explanations, it is necessary to propose some algorithms to solve the tracking control problem of chained-form nonholonomic MASs in the presence of input delay. To the best of the authors’ knowledge, this problem has not been considered in the literature. This motivates us for this study.
In this paper, a finite time control law is firstly obtained for nonholonomic MASs in which the states of each agent track the states of the target in the absence of input delay by using the results of Shi et al. (2015). Actually, Shi et al. (2015) proposed some controllers for a nonholonomic MAS to ensure that the agents can agree on a common value with their neighbors. Moreover, the agents do not track any target in Shi et al. (2015). In this paper, we consider a target whose states must be tracked by the states of each agent. Existence of states and input of the target and tracking errors in distributed controllers in this paper results in a much more difficult stability analysis than that of Shi et al. (2015). Furthermore, input delay causes the existing controllers fail to track the target. It means that the existing controllers should be modified such that the states of each agent with input delay converge to the states of the target in a finite time. Since there is not any finite time controller for the tracking control of chained-form nonholonomic MASs in the literature and the finite time convergence is considered in this paper, a novel finite time distributed controller is needed for chained-form nonholonomic MASs with input delay. This controller is designed based on the terminal sliding mode method, a switching control strategy and a future state estimator (FSE). The dynamics of agents and also the target is given by a third order nonholonomic system in the chained form.
Compared with the previous works, the contributions of this paper are at least fourfold. First, in contrast to the works of Yu and Liu (2016), Dong and Djapic (2016), Cao et al. (2015), Zhao et al. (2017), Yang et al. (2017) and Liu et al. (2017), which suggested some control laws for the dynamic form of nonholonomic MASs and cannot be used for chained form of nonholonomic MASs, this paper will propose some controllers for chained-form nonholonomic MASs that can be applied to any nonholonomic MASs with three states and two inputs. Second, it is assumed in this paper that the target is not connected with any agent in the design of the distributed control law for tracking control, whereas the previous results in Du et al. (2015) and Cao et al. (2015) have assumed that at least one of the agents is connected to the target. Third, in contrast to the works of Mobayen (2015) and Shang et al. (2016), in which the proposed controllers are not distributed and cannot be utilized for MASs, in this paper some distributed controllers are introduced to solve the tracking control of chained form nonholonomic MASs. Fourth, in Yu and Liu (2016), Cao et al. (2015), Zhao et al. (2017), Yang et al. (2017) and Liu et al. (2017), Mobayen (2015), Du et al. (2015) and Cao et al. (2015), the control laws have been designed for nonholonomic systems in the ideal conditions, whereas the suggested controllers in this paper are obtained for nonholonomic MASs with input delay that mean these algorithms can be used in practical environments and work appropriately in the presence of the destructive factor of input delay.
The rest of this paper is organized as follows: Section 2 provides the preliminaries and problem definition. Sections 3 and 4 introduce distributed controllers for nonholonomic MASs with and without input delay. Section 5 studies the effectiveness of the suggested controllers and estimator with simulations. Finally, the conclusions are drawn in Section 6.
Notation: presents the set of real numbers. denotes the dimensional Euclidean space. denotes the set of all real matrices. expresses an identity matrix. denotes the smallest eigenvalue.
Preliminaries and problem definition
Graph Theory: To model MASs, we use an undirected graph , where , and denote set of agents, set of links among agents and the adjacent matrix, respectively. The Laplacian matrix of the graph is defined as , in which is a diagonal matrix with . denotes the set of neighbors of the agent i. If nodes and are connected, then the node is the neighbor of node and . Moreover, if there is at least one path between every two arbitrary agents, is called a connected graph.
Assumption 1: There exist positive constants , such that .
Assumption 2: The graph G related to the nonholonomic mobile agents is connected and undirected.
Lemma 1 (Hong et al., 2006): If Assumption 2 holds, then the matrix is positive definite where is an identity matrix with proper dimensions.
Suppose that there exists a positive definite continuous function such that , where and , then approaches 0 in a finite time. Furthermore, the finite convergence time satisfies .
Lemma 4 (Huang et al., 2005): For any and , the following inequalities hold
when is a constant. If is odd, then
Problem definition
Consider N nonholonomic mobile agents with the following dynamic equations
where are states of the ith agent and are control inputs of agent i. and are positive constants. A nonholonomic mobile target is given as
where are states and are control inputs of the target. The main problem is to design a distributed control algorithm such that the states of agents with dynamics (1) track the states of the target with dynamics (2) in a finite time. Before the design of distributed control algorithm in the presence of input delay, we will derive this algorithm in the absence of input delay.
The distributed tracking control in the absence of input delay
To design the distributed controller for the ith agent, the tracking error between the states and inputs of the agent i and the target are defined as , , , and . The error dynamics equation is given as
To solve the finite-time tracking problem, control laws and are designed such that in a finite time. At first, the system (3) is divided into two subsystems, a first order subsystem as
and a second order subsystem
In the following, controllers and are provided.
Theorem 1: Consider the system (3). Under Assumptions 1–2, the following finite time control law is proposed
with
where , , , , , are positive odd integers, are positive constants, is switched time, is the ideal sliding surface, and is the signum function. Under the control laws (6) and (7), the states of the system (3) can converge to zero in a finite time.
Proof: For , since , the subsystem (5) can be rewritten as
The states of the system (8) can reach zero in a finite time by applying controller (7). To prove this fact, the two following proof steps must be considered:
There is a finite time such that for any .
When is obtained, the states of subsystem (8) reach zero in finite time .
Step 1: Define the Lyapunov function . Taking the derivative of yields
By Lemma 4, we have
where . By using Lemma 3, one can obtain from (10) that in a finite time satisfying .
Step 2: For , we have and the system (8) is converted to
We should prove that the states of the system (11) can reach zero in a finite time . Choose the following Lyapunov function
where and
Taking derivation of , one gets
By using Lemma 2, one can obtain
Defining and taking as a virtual control law, it follows that
To continue proof, we must obtain the . Defining , one gets
Note that
where , and is a positive constant. It can be also verified from Shi et al. (2015) that
where and are positive constants and . Substituting (21) into (20), it follows that
By the definition of ξi and (21), we have and it is concluded that
In the following, from (16), one gets
By Lemma 4, we have
where , and are positive constants. Putting (25) into (24), it follows that
Substituting (26) and (23) into (14) leads to
From (27) and using Assumption 1, one gets
Parameters and must be chosen such that
for positive constant . Using Assumption 2, Lemmas 1, 4 and Shi et al. (2015), it follows that
and
Putting (30) and (31) into (29), we have
where . By using Lemma 4 and for , one can obtain
By using (33), (29) and for , one gets
By Lemma 3, it is concluded that converges to zero in the following finite time
Thus, by using (10) and (34), we have for . It means that and we have
for . Therefore, the states of the system (8) under finite-time controller (7) reach zero in a finite time.
When , and have converged to and . Therefore, the subsystem (4) should be only considered. By applying in Theorem 1 into subsystem (4), we have
Choose the Lyapunov function Taking the derivative of along system (37) yields
where and . By using Lemmas 1 and 4, one gets
and
From (38) and (39), it is concluded that
By Lemma 3 and (40), one can conclude that converges to zero within a finite time
When , we have
Thus, it follows from (36) and (41) that after the time . This completes the proof.
Remark 1: Theorem 1 proved that the states of tracking error system (3) using controllers and can reach zero in a finite time. It implies that the states of MAS (1) with the following controllers can converge to the states of the target (2) in a finite time.
The distributed tracking control in the presence of input delay
In the presence of input delay, proposed control laws (42) and (43) for each agent are converted to
where
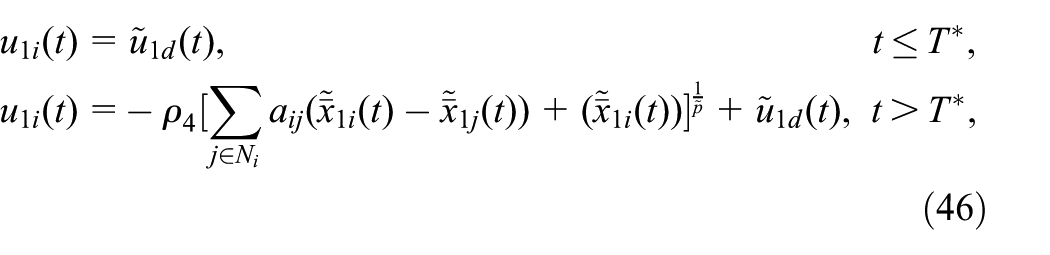
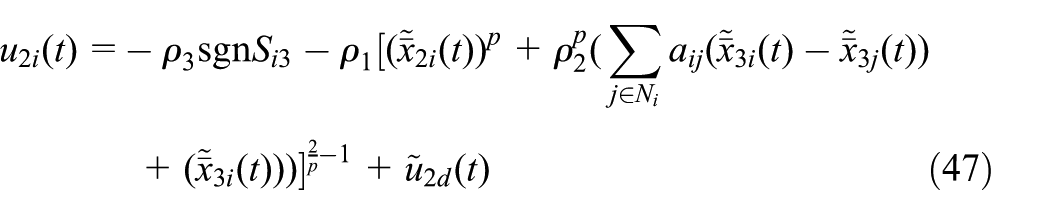
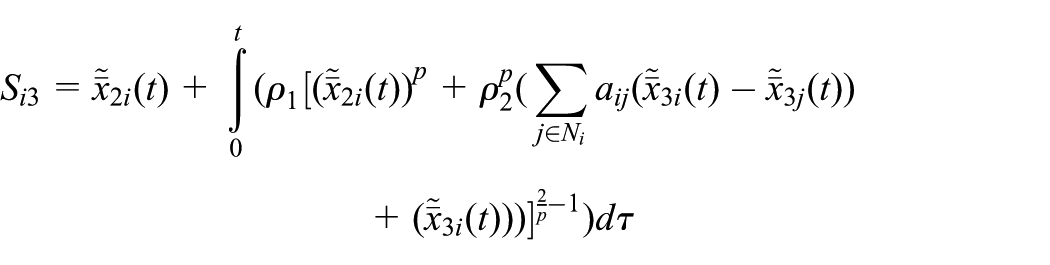
Controller (44) and (45) fail to track the target in the presence of constant delay and . To solve this problem, modified controllers are proposed as
with
where and are estimates of and . When and get equal to and , (46) and (47) in the presence of delay have the same performance of (42) and (43) in the absence of delay and the tracking control is achieved. Since
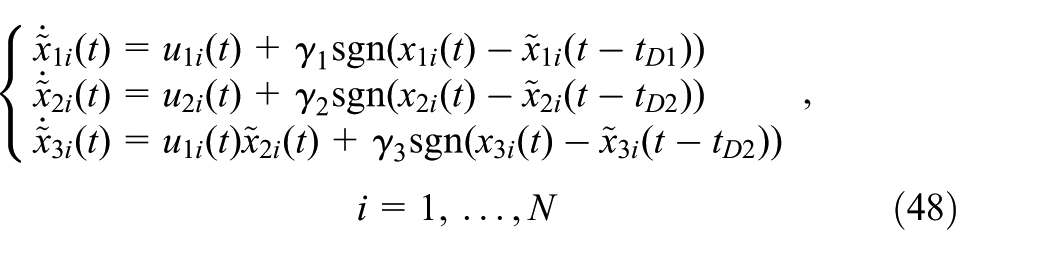
then, an estimator should be designed to estimate future states of the agents and the target. It should be noted that we obtain from estimation of future states of the target and do not need to design an estimator for estimation of . The proposed estimator has the following dynamics
where , and are positive constants. To analyses the stability of the FSE (48), we assume FSE (48) is used to predict the future states of the agents. It can be shown that converge to with a hyper-exponential rate. For this purpose, we define three error functions as
Then, we have
At first, we consider the stability of the following system
Efimov et al. (2016) showed converges to zero with a hyper-exponential rate. Therefore, it can be concluded that . Since the dynamics of is the same as , then we have . After , we replace in the dynamics of and it can be obtained from (49) that
By using the result of Efimov et al. (2016), it is proved that converge to zero with a hyper-exponential rate and then we can conclude converge to . It should be noted that we choose bigger than because converges to zero with a faster rate than to conclude (50) and to complete the stability analysis. Furthermore, FSE (48) can be used to predict the future estimated states of the target because the dynamics of agents and the target are similar.
Remark 2: Here, the effect of input delay and number of agents on the proposed controllers (46) and (47) is investigated as follows:
Based on the above analysis, it is proved that FSE (48) can estimate future states of MAS (1) and target (2) with a hyper-exponential rate. When the states of the estimator (48) get equal to future states of MAS (1) and target (2), (46) and (47) with input delay have the same performance of (42) and (43) in the absence of delay. So, it is concluded that the effect of input delay on control laws (46) and (47) is related to the performance of FSE (48) and its convergence rate. Efimov et al. (2016) proved that increasing , and results in increasing the convergence rate of FSE (48). Therefore, since coefficients , and are constants, bigger delays (bigger and ) cause the tracking control to be achieved in a faster rate.
The effect of number of agents (N) on the controllers (46) and (47) can be considered in two aspects. First, it is clear from the controllers that N has not any effect on obtaining the parameters of controllers (46) and (47). Second, since the technique of the consensus on state is used in the design of the proposed controllers, the graph structure is effective on convergence rate or consensus time of the tracking results (Olfati-saber et al., 2004; Ogiwara et al., 2017). In other words, the more the algebraic connectivity (the second smallest eigenvalue of the Laplacian matrix) of the MAS’s graph, the less is the consensus time of the tracking of the agents. According to Ogiwara et al. (2017), the number of agents has an indirect effect on algebraic connectivity. It implies that increasing the number of agents does not lead to increase of algebraic connectivity. Actually, in addition to the number of agents, the set of links among agents as another factor of graph structure also has an effect on the algebraic connectivity and should be considered. Therefore, the number of agents affects indirectly on the performance of controllers (46) and (47) and it cannot be expressed this effect is positive or negative (other factors such as the set of links among agents should be investigated).
Remark 3: We assume that the states of the target (2) are available to design distributed controllers (42) and (43) while they are not available in practical environments. Moreover, there exists noise in dynamics of target in practical MASs. Therefore, it is necessary to use an estimator for each agent to estimate states of target in the presence of noise. Target (2) with noise has the following dynamics
The sensing model of the ith agent is described by
where and are Gaussian white noises and is a nonlinear function. To estimate the states of the target (51), for every agent, the presented filter in Jenabzadeh et al. (2017) is used with dynamics
where is the estimation of . , and are the estimator gain matrix, the consensus gain and the estimator matrix of agent i, respectively. By using filter (53), we can estimate the states of the target (51) and replace them in controllers (42) and (43). It should be mentioned that to estimate the future states of the target in the presence of delay, the form of FSE (48) is changed as follows
In this case, the state of converges to the future state of with a hyper-exponential rate. By defining the error functions as
the error dynamics are the same as system (49). Thus, by using stability analysis of system (49), it can be easily shown that error functions , and converge to zero.
Simulation results
In this section, the performance of the proposed finite time controllers (46) and (47) and FSE (48) is investigated in target tracking of MASs with four nonholonomic mobile agents. The communication among the four agents with is shown in Figure 1. The dynamic equations of each agent are described by
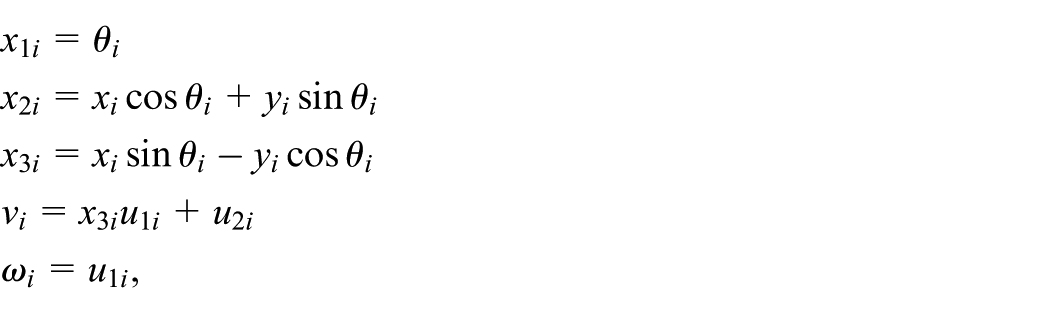
where and are the Cartesian coordinates of the center of the rear wheel and measures the heading angle from the x-axis. and are the linear and angular velocities. With the state and control transformations
and in the presence of input delay, system (55) is transformed as
The purpose is to track the states of the target (51) with and . The sensing model of the ith agent is described by
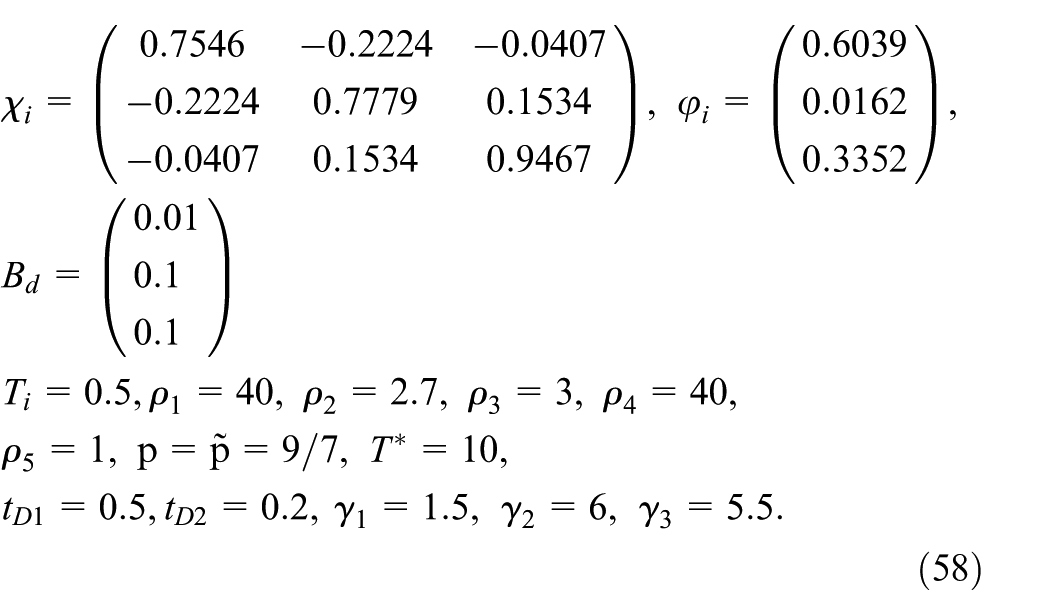
where and are independent white noises with variances 0.1 and 0.01. The parameters considered for finite time controllers, FSE and filter (53) are
MAS topology with agents.
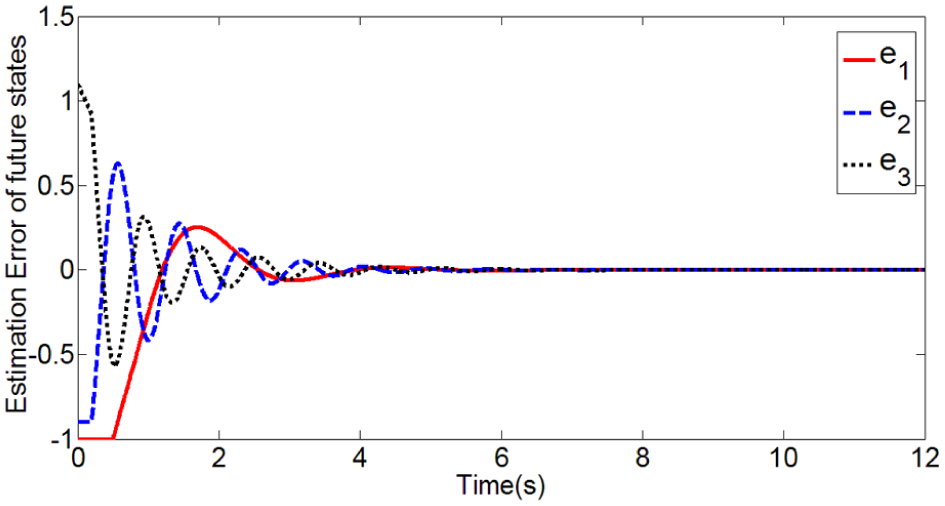
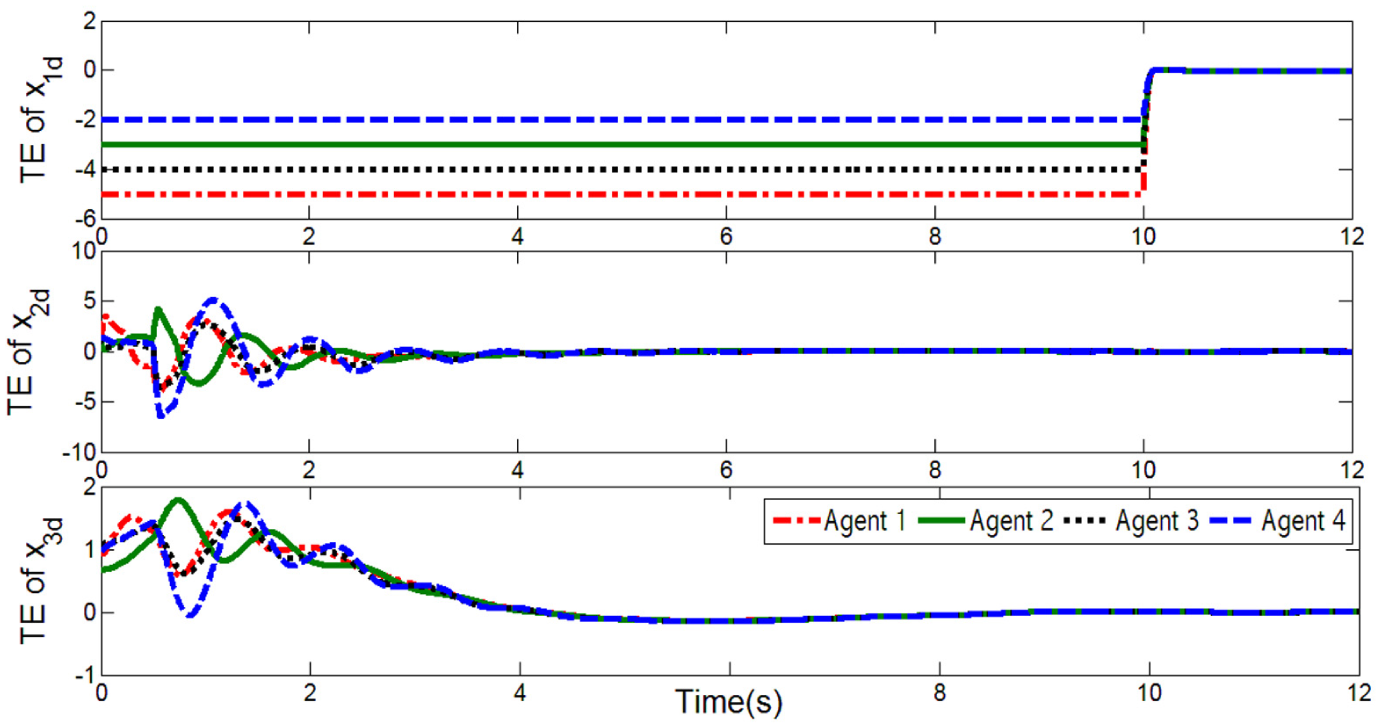
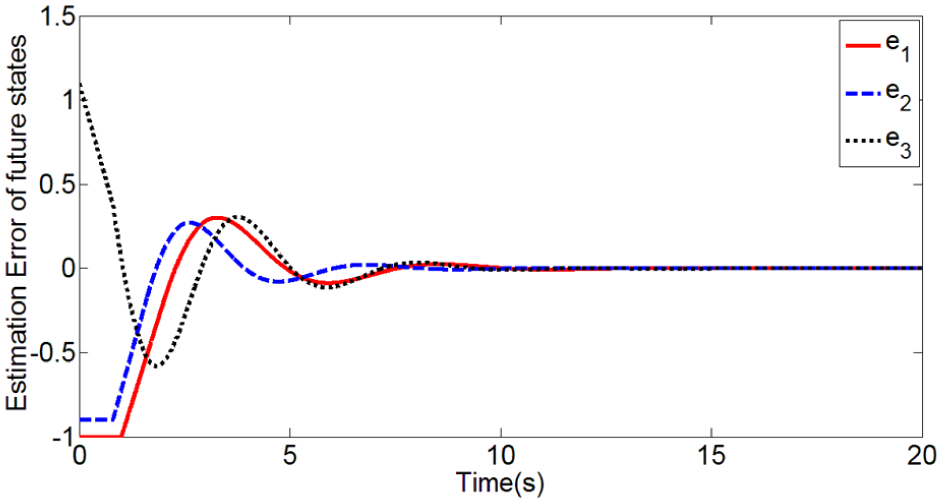
Simulations are carried out based on two simultaneous steps. At the first step, the future states of MAS (56) and estimated states of the target (51) are predicted by FSEs (48) and (55). Figure 2 illustrates the estimation errors of the FSE (48) of agent 1 in which , and . It follows from Figure 2 that FSE (48) estimates the future states of MAS (56) in almost 4 seconds. At the second step, the states of FSE (48) is used in controllers (46) and (47). According to the explanations in previous sections, the controllers (46) and (47) are designed based on a switching strategy. It means that the controller (47) makes the states of and converge to estimates of and in a finite time. Then, the controller (46) makes the state of reach to estimate of in a finite time. Figure 3 demonstrates the tracking errors of four agents. This figure shows that and converge to estimates of and in almost 6 seconds. Moreover, converge to estimate of in 12 seconds. Therefore, the states of all agents converge to the estimated states of the target (51) in the presence of input delay in a finite time. It is worth noting that the convergence times of tracking cannot be decreased because these times depend on the estimation time of the target’s states. Actually, to track the target, the states of the target (51) should be firstly estimated by estimator (53). Since the parameters of the estimator (53) are obtained by solving some given linear matrix inequalities, so they are given and unchangeable. Thus, the estimation time of target’s states is constant and the convergence times of tracking cannot be reduced.
FSE estimation errors of agent 1 for and .
Tracking errors (TEs) of agents for and .
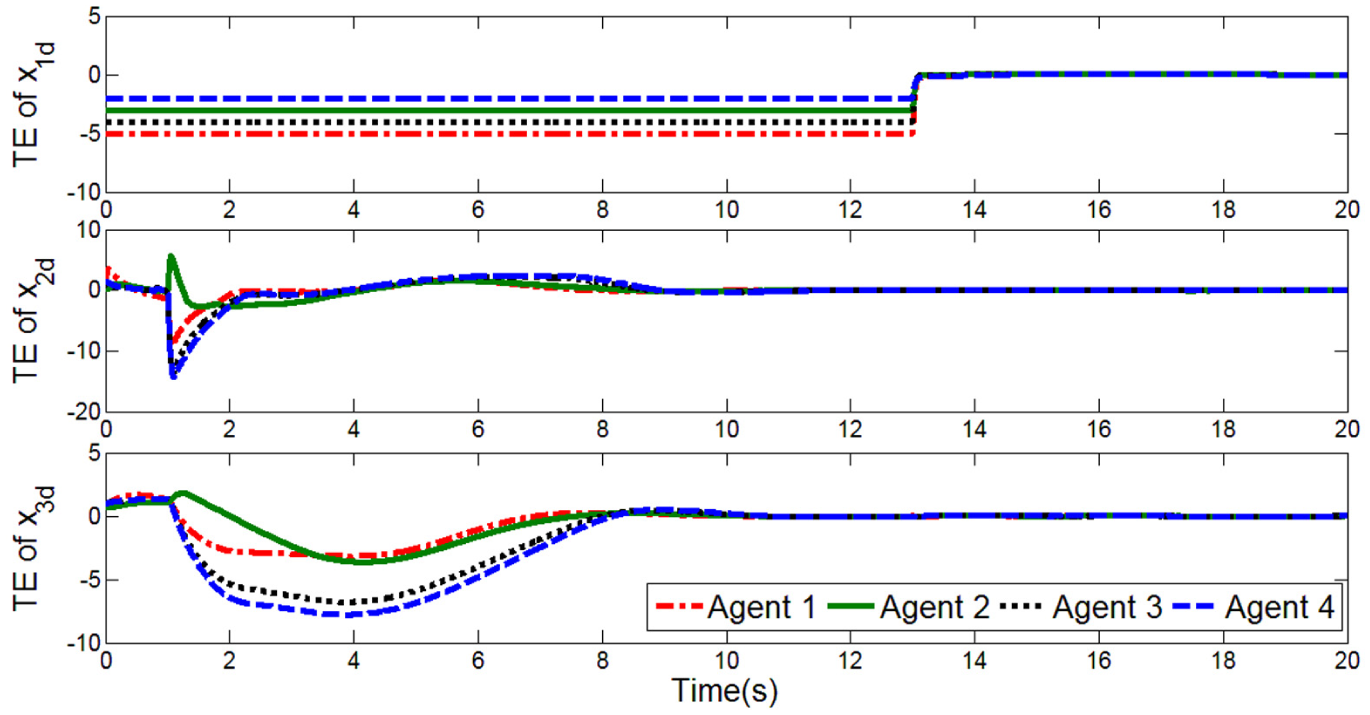
For more investigation, simulations are performed for bigger input delays and . In this case, simulation parameters are the same as (58) except for and . Tracking errors of agents and FSE estimation errors of agent 1 are illustrated in Figures 4 and 5. These figures show the convergence time of agents and estimation time of FSE are more than the previous simulation. This verifies Remark 2 in which it was stated that smaller coefficients , and cause increase of convergence time.
Tracking errors (TEs) of agents for and .
FSE estimation errors of agent 1 for and .
Conclusions and future work
In this paper, two controllers have been suggested for nonholonomic MASs with and without input delay to track the states of a target with nonholonomic dynamics. The proposed control laws have been obtained based on a switched strategy and an FSE is used to predict the future states of agents. The stability analyses of the proposed controllers and estimator have been also provided. The simulations showed the suitable performance of the suggested algorithms in tracking control of nonholonomic MASs. Future directions of this paper might involve: (1) To design and analyse a distributed tracking control algorithm for discrete-time nonholonomic MASs with time delay using the results of Kokil (2017) and Kokil (2014). (2) To develop the suggested controllers for nonholonomic MASs with directed graphs and jointly connected topologies. (3) Since this paper uses the idea of finite time to design the distributed controllers, where the finite time is dependent on the initial values, the controller design can be improved by considering the fast terminal sliding modes, given in Tie and Cai (2010) that can provide a better convergence time independent of the initial values. (4) To extend the proposed control laws for nonholonomic MASs with external disturbances using the results of Shi et al. (2015).
Footnotes
Acknowledgements
We wish to thank Dr Bahman Gharesifard from Queen’s University, Canada for his valuable comments that helped us to improve this paper.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
1.
BhatSPBernsteinDS (2000) Finite-time stability of continuous autonomous systemsSIAM Journal on Control and Optimization38(3): 751–766.
2.
HuangXLinWYangB (2005) Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica41(5): 881–888.
3.
CaoKCJiangBChenY (2015) Cooperative control design for non-holonomic chained-form systems. International Journal of Systems Science46(9): 1525–1539.
4.
CaoKCJiangBYueD (2017) Cooperative path following control of multiple nonholonomic mobile robots. ISA Transactions71(1): 161–169.
5.
ChenLQinKHuJ (2016) Bounded consensus tracking control of second-order multi-agent systems with active leader and jointly connected topology. Transactions of the Institute of Measurement and Control40(2): 504–513.
6.
DuHWenGYuXet al. (2015) Finite-time consensus of multiple nonholonomic chained form systems based on recursive distributed observer. Automatica62(1): 236–242.
7.
DongWDjapicV (2016) Leader-following control of multiple nonholonomic systems over directed communication graphs. International Journal of Systems Science47(8): 1877–1890.
FranchiAStegagnoPOrioloG (2016) Decentralized multi-robot encirclement of a 3D target with guaranteed collision avoidance. Autonomous Robots40(2): 245–265.
10.
HausmanKMüllerJHariharanAet al. (2015) Cooperative multi-robot control for target tracking with onboard sensing. The International Journal of Robotics Research34(13): 1660–1677.
11.
HongYHuJGaoL (2006) Tracking control for multi-agent consensus with an active leader and variable topology. Automatica42(7): 1177–1182.
12.
JenabzadehASafarinejadianBMohammadniaF (2017) Distributed consensus filter for a class of continuous-time nonlinear stochastic systems in sensor networks. Asian Journal of Control19(4): 1284–1294.
13.
JiangYLiuJWangS (2015) Cooperative output feedback tracking control for multi-agent consensus with time-varying delays and switching topology. Transactions of the Institute of Measurement and Control37(4): 550–559.
14.
KokilP (2014) An LMI based criterion for global asymptotic stability of discrete-time state-delayed systems with saturation nonlinearities. International Scholarly Research NoticesVolume 2014, 6 pp., http://dx.doi.org/10.1155/2014/761959
15.
KokilP (2017) An improved criterion for the global asymptotic stability of 2-D discrete state-delayed systems with saturation nonlinearities. Circuits, Systems, and Signal Processing36(6): 2209–2222.
16.
LiJ (2015) Distributed cooperative tracking of multi-agent systems with actuator faults. Transactions of the Institute of Measurement and Control37(9): 1041–1048.
17.
LiuZWangLWangJet al. (2017) Distributed sampled-data control of nonholonomic multirobot systems with proximity networks. Automatica77(1): 170–179.
18.
MobayenS (2015) Fast terminal sliding mode tracking of non-holonomic systems with exponential decay rate. IET Control Theory & Applications9(8): 1294–1301.
19.
MurrayRMSastrySS (1993) Nonholonomic motion planning: Steering using sinusoids. IEEE Transactions on Automatic Control38(5): 700–716.
20.
OgiwaraKFukamiTTakahashiN (2017) Maximizing algebraic connectivity in the space of graphs with a fixed number of vertices and edges. IEEE Transactions on Control of Network Systems4(2): 359–368.
21.
Olfati-SaberRMurrayRM (2004) Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control49(9): 1520–1533.
22.
ShangYHouDGaoF (2016) Global output feedback stabilization of nonholonomic chained form systems with communication delay. IAENG International Journal of Applied Mathematics46(3): 367–371.
23.
ShiSYuXLiuG (2015) Finite-time consensus algorithm for multiple nonholonomic disturbed systems with its application. Mathematical Problems in Engineering. DOI: 10.1155/2015/358161. 2015 (2015), 10 pp.
24.
TieLCaiKY (2010) A general form and improvement of fast terminal sliding mode. In: 2010 8th World Congress on Intelligent Control and Automation (WCICA), Jinan, China, July, pp. 2496–2501. IEEE.
25.
WangQChenJFangJet al. (2014) Flocking control for multi-agent systems with stream based obstacle avoidance. Transactions of the Institute of Measurement and Control36(3): 391–398.
26.
XiaHHuangTZShaoJLet al. (2014) Leader-following formation control for second-order multi-agent systems with time-varying delays. Transactions of the Institute of Measurement and Control36(5): 627–636.
27.
YangCChenFXiangLet al. (2017) Distributed rendezvous and tracking for multiple unicycles with heterogeneous input disturbances. International Journal of Robust and Nonlinear Control27(9): 1589–1606.
28.
YuXLiuL (2016) Distributed circular formation control of ring-networked nonholonomic vehicles. Automatica68(1): 92–99.
29.
ZhaoXWGuanZHLiJet al. (2017) Flocking of multi-agent nonholonomic systems with unknown leader dynamics and relative measurements. International Journal of Robust and Nonlinear Control27(17): 3685–3702. DOI: 10.1002/rnc.3762.