
Abstract
This article describes the application of a new population-based meta-heuristic optimization algorithm inspired by the kidney process in the human body for the tuning of power system stabilizers (PSSs) in a multi-machine power system. The tuning problem of PSS parameters is formulated as an optimization problem that aims at maximizing the damping ratio of the electromechanical modes and the kidney-inspired algorithm (KA) is used to search for the optimal parameters. The efficacy of the KA-based PSS design was successfully tested on a well-known 16-machine, 68-bus power system. The obtained results are evaluated and compared with the other results obtained by the original particle swarm optimization (PSO) and the bat algorithm (BA) methods. From the detailed eigenvalue analysis, the nonlinear simulation studies and some performance indices it has been found out that for damping oscillations, the performance of the proposed KA approach in this study is better than that obtained by other intelligent techniques (PSO and BA). Moreover, the efficiency and the superior performance of the proposed method over the other two algorithms in terms of computation time, convergence rate and solution quality are confirmed.
Keywords
Introduction
As it is known, an electric power system consists of thousands of electrical components connected together. Many elements, some of which are combinations of electrical and mechanical parts, are rather nonlinear elements. Thus, power systems have become complex operating and control systems with various unstable features. These systems are subjected to many different kinds of disturbances, as some systems are spread over a wide geographical area spanning the entire continents (Anderson and Fouad, 1977). A power system exhibits usually electromechanical oscillations because of disturbances owing to short circuits and variations in operating point. These frequency oscillations must be damped to a desired limit; otherwise the growing amplitude of these oscillations will cause instability (Sun et al., 2014). The power system stabilizers (PSSs) are the most widely used device for resolving oscillatory stability problems. PSSs have long been seen as an effective way to improve the damping of electromechanical oscillations in electrical power systems (Kundur, 1994; Sauer and Pai, 1998).
The conventional PSSs are designed based on the linear control theory, in which the power system model is linearized around a nominal operating point. The structure and parameters of the PSSs are determined to provide the best performance at this point. However, power systems are generally nonlinear and the operating conditions can consistently vary over a wide range. Thus, the conventional PSSs with fixed parameters cannot provide optimum performance inside of the entire operating range. Moreover, the power system configuration changes over time, which requires adjusting the parameters of the PSSs to maintain the desired performance. Alternative control techniques, such as self-tuning regulators, pole placement, feedback linearization and pole shifting, have been investigated for the design of PSSs. However, these techniques require intensive computations and long computer processing time (El-Metwally, 2001; Ekinci and Demiroren, 2016).
Recently, intelligent optimization techniques have been applied for PSS parameter optimization. Although Simulated Annealing (SA) is presented in Abido (2000) to optimize the PSS, this technique may fail when it is trapped into one of the local optimal. Another heuristic technique such as Tabu Search (TS) is introduced in Abido and Abdel-Magid (2002) to design PSSs. Although this optimization method seems to be effective for the design problem, the efficiency is reduced owing to the use of highly epistatic objective functions and the large number of parameters that must be optimized. It is also a time-consuming method. Genetic algorithm (GA) is developed in Abido (2001), Sundareswaran and Razia Begum (2004) and Hassan et al. (2014) for optimal design of PSSs. However, this optimization technique requires a very long run time depending on the size of the system under study. In addition, the premature convergence of GA represents a major problem. Particle swarm optimization (PSO) for the design of the PSS parameters at different operating conditions is proposed in Abido (2002), Ekinci and Demiroren (2015), Labdelaoui et al. (2016) and Ekinci (2016). However, the performance of the original PSO greatly depends on its parameters, and it often suffers from the problem of being trapped into the local optima and having a premature convergence. A relatively newer evolutionary computation algorithm, called bat algorithm (BA) for the design of the PSS parameters is illustrated in Sambariya and Prasad (2014), Ali (2014), Ekinci (2015b) and Peres et al. (2015). BA is a powerful algorithm at exploitation but has some insufficiency at exploration, thus it can easily get trapped into the local minimum solutions. Other methods are listed in Karnik et al. (2011), Linda and Nair (2012), Khodabakhshian et al. (2013), Pahasa and Ngamroo (2014), Shayeghi and Ghasemi (2014), Soliman (2016), Elazim and Ali (2016), Farah et al. (2016) and Shafiullah et al. (2017) for PSS parameter optimization. Good results may be obtained by these kinds of optimization approaches. However, some deficiencies have been identified in these algorithms such as local minima stagnation, premature convergence, more computing time, difficulties of control parameter selection (Islam et al., 2017). In order to overcome all drawbacks of above mentioned methods, a kidney-inspired algorithm (KA)-based PSS is proposed in this study. KA is not largely affected by the size and nonlinearity of the problem and can converge to the optimal solution in many cases where many analytical methods fail to converge (Jaddi and Abdullah, 2018). Considering the strength of this algorithm, it is employed in the present work for the optimal tuning of the PSS parameters.
As an efficient and powerful global optimization technique, KA was first proposed by Jaddi and others in 2017 (Jaddi et al., 2017). This optimization technique imitates four elements – filtration, reabsorption, secretion, and excretion – in the physiological structure of the urinary system of kidneys (Jaddi et al., 2017). Preliminary studies indicate that KA’s optimization ability is superior to that of the GA, PSO, BA and the other optimization algorithms available in the literature for solving unconstraint optimization problems because these methods fail to deal with the multimodal optimization problems (Jaddi et al., 2017). The balance between the exploration and the exploitation is the basic benefit of this optimization technique. While the exploration is fulfilled by new solution generation and reabsorption, the exploitation is fulfilled by filtration that focuses on the better area of the search space. This benefit allows the optimization technique to accomplish a better convergence (Jaddi et al., 2017). In addition, the algorithm has not yet been applied to power system problems including the economic dispatch problem, the automatic generation control, the power system stabilizer, the fault section estimation, the PID controller tuning and so on.
According to the authors’ best knowledge, the optimal design of PSS parameters by using KA has not been studied in literature yet. This paper proposes a new design method for the stability enhancement of multi-machine power system using PSSs in which their parameters are tuned by KA. To evaluate the effectiveness of this new algorithm, the stability performances are performed and compared with that of other approaches based on the original PSO and BA. The eigenvalue analysis and nonlinear time domain simulations are carried out on the 16-machine, 68-bus New England/New York interconnected electric power system. The analysis of results shows that the proposed method attains the desired performance for damping the low frequency oscillations and enhances the system dynamic stability under a variety of disturbances.
The organization of this article is as follows. In Section 2, a brief overview of KA is introduced. The modeling of the power system with PSS, the optimization problem and the application of the KA to such problem are presented in Section 3. The optimization results and simulation comparisons are provided and discussed in Section 4. Finally, the conclusions are summarized in Section 5.
KA
KA is a novel optimization technique originated from exploration and exploitation capabilities of the kidney operating process in a human body. The following are the four main elements of kidney procedures that are referenced during the imitation (Jaddi et al., 2017; Liang et al., 2017; Taqi and Ali, 2017):
Filtration: transfer of water and solutes from the blood to the tubules.
Reabsorption: transport of valuable solutes and water from the tubules to the blood.
Secretion: transfer of destructive additional constituents from the bloodstream to the tubule.
Excretion: transferring the waste outcomes of the previous three procedures into the urine.
Figure 1 shows the main biological mechanism of the kidney taken from Hall (2015). As indicated in the lower part of Figure 1, the excretion amount is equivalent to the filtration minus reabsorption plus secretion.
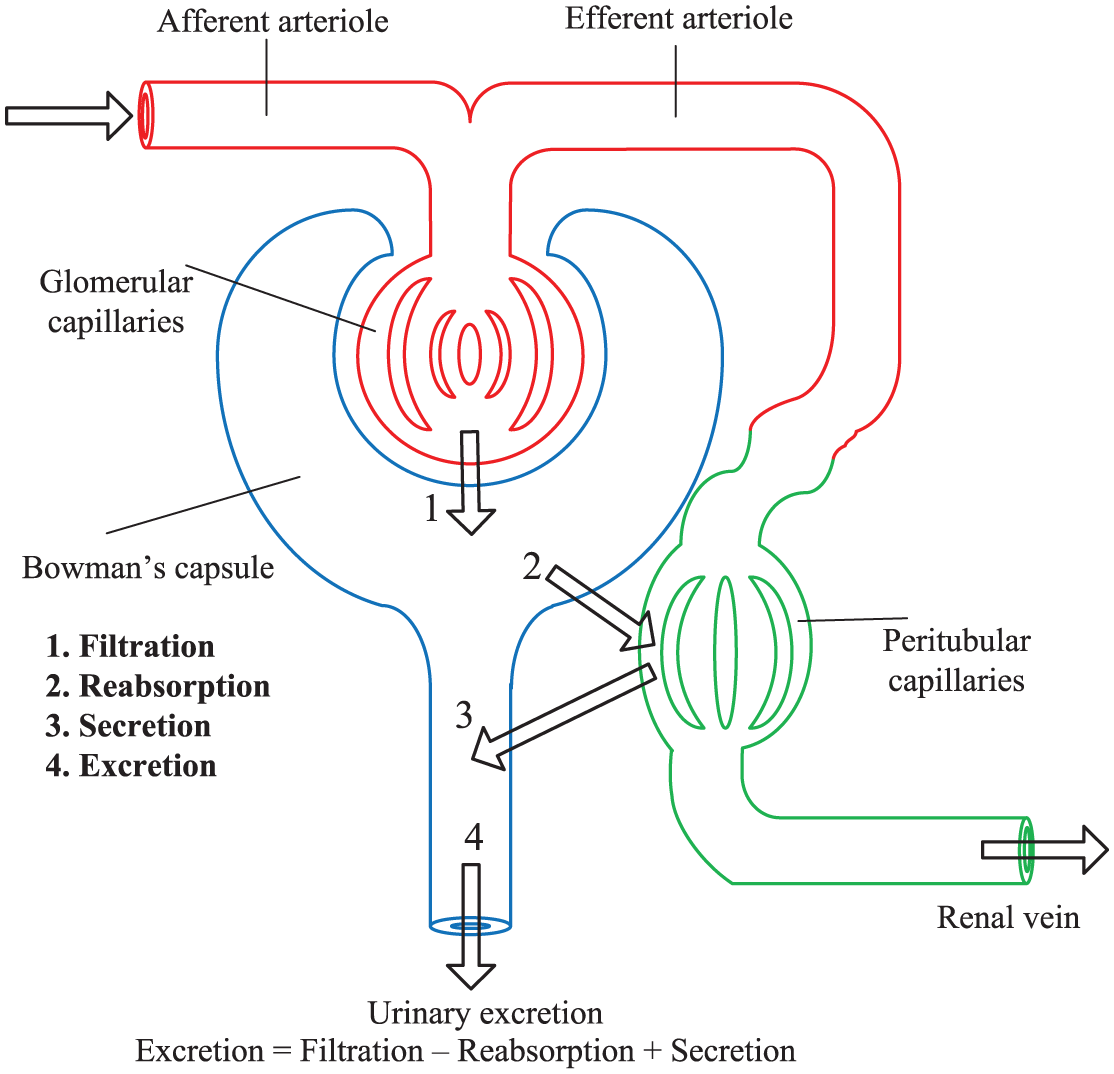
Main biological mechanism of the kidney (Hall, 2015).
In KA initial phase, an arbitrary populace of potential solutions is formed while the objective function is computed for each of the solutions. In every iteration, there is a generation of other potential solutions through a movement towards the current optimal solution. Thus, through the application of filtration operator, there is a filtration of potential solutions with high intensity towards the filtered blood (FB) with others being transferred to the waste (W). The reabsorption, secretion and excretion methods of the human kidney procedure are replicated here during the search procedure to check various conditions entrenched to the algorithm. When a potential solution is transferred to W, the algorithm gives a chance to that solution to improve and get an opportunity to move back into FB. When this chance is not well exploited, the solution is expelled from W, and a potential solution is moved into W. Moreover, after filtration, if a candidate solution is appointed to FB and the quality of this solution is not better than the worst solution in FB, this solution is secreted. Whereas, if the solution is better than the worst, the worst solution is secreted from FB. Lastly, the solutions in FB are put in order and the best solution is updated. The filtration rate is updated and FB and W are merged (Jaddi et al., 2017; Liang et al., 2017; Taqi and Ali, 2017). When the termination condition is satisfied, this iterative process stops. The flowchart of the KA is provided in Figure 2.
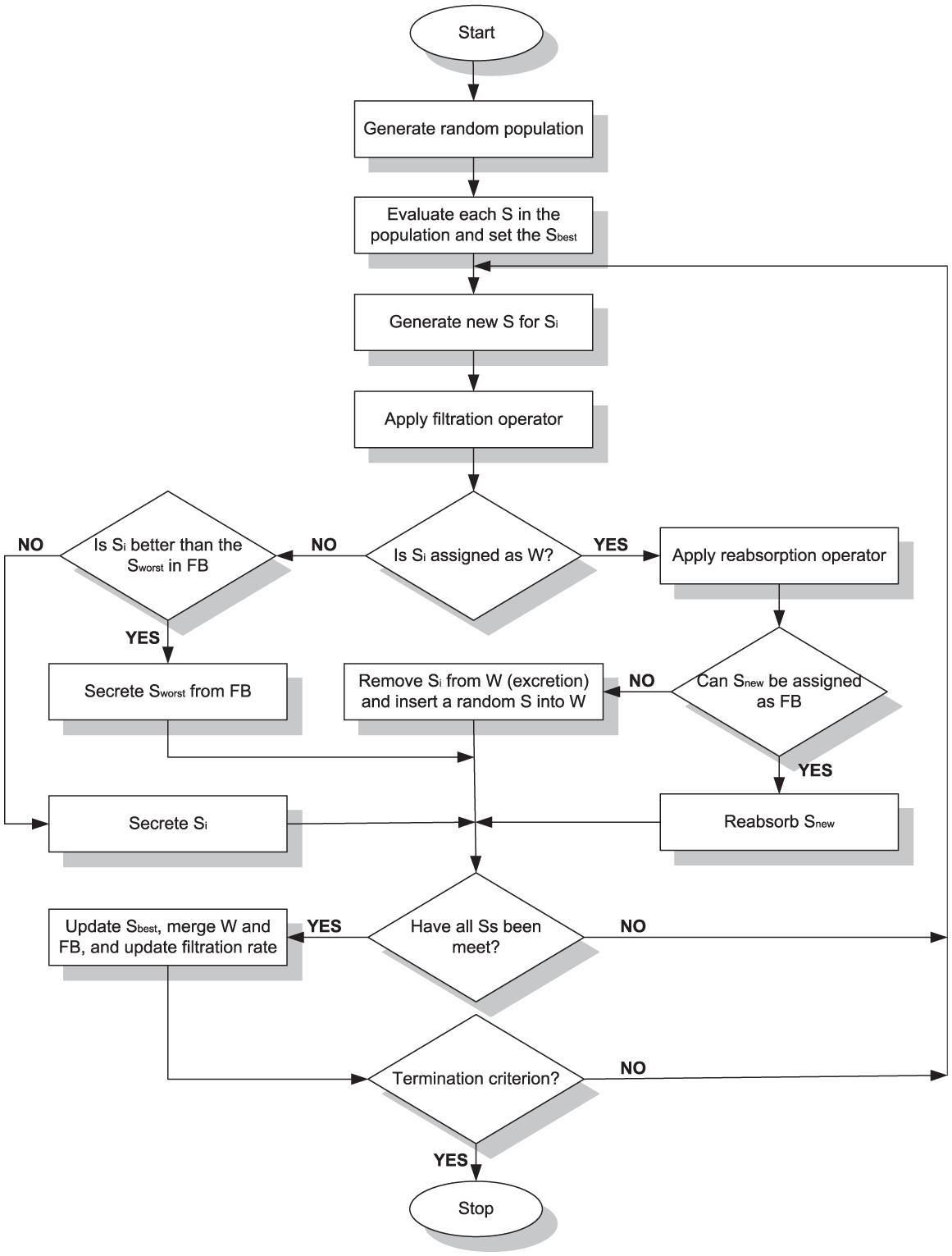
Flowchart of KA (Jaddi et al., 2017).
The components involved in the KA are simply introduced as follows (Jaddi et al., 2017).
Movement of virtual solutes
Each solution in the KA population can be regarded as a solute in the biological kidney. A new solution is produced by transferring the solution from the earlier iteration towards the best solution obtained by the algorithm so far. This transfer is formulated as follows

where S represents a solution in the population.
Filtration
By using a filtration rate, which is computed by a filtration function at each iteration, the solutions in the population are filtered. The fr (filtration rate) is computed as follows

Where
Reabsorption
The reabsorption operator is a process that provides a chance to a wasted solution W to become a portion of FB. After applying the transfer operator (Eq. 1) again, a solution appointed to W can be assigned back to FB if it fulfills the filtration rate.
Secretion
Secretion is an operator for solutions, which is appointed to FB. If a solution that is appointed to FB is not better than the worst solution in FB, it is secreted and is transferred to W; otherwise this solution stays in FB and the worst solution in FB is secreted and is moved to W.
Excretion
After giving a chance of reabsorption, if the solutions in W cannot fulfill the filtration rate to become a portion of FB, they will be excreted. After two times transferring, if these solutions do not have the capability of being FB then they are excreted. In this situation, a random solution will substitute such a solution in W. The continuous addition of solutes and water into the glomerular capillaries of the physiological kidney is mimicked by the addition of random solutions. Figure 3 depicts the schematic process of the KA. The solute in the first group (Figure 3(a)) is divided into FB and W by measuring the solute and filtration rate in the filtration stage (Figure 3(b)). Then, depending on FB or W, each solute and its values of the objective function reabsorbed, secreted or excreted by the associated operators (Figure 3(c)). In this process, some solutes that are strong enough to be distributed to W, and solutes that achieve reabsorption are discharged if they still cannot be distributed to FB, but some solutes can be successfully reabsorbed. After placing each solute (Figure 3(d)), FB and W are merged as a new group to study and to continue this iteration process until the termination condition is met (Figure 3(e)).
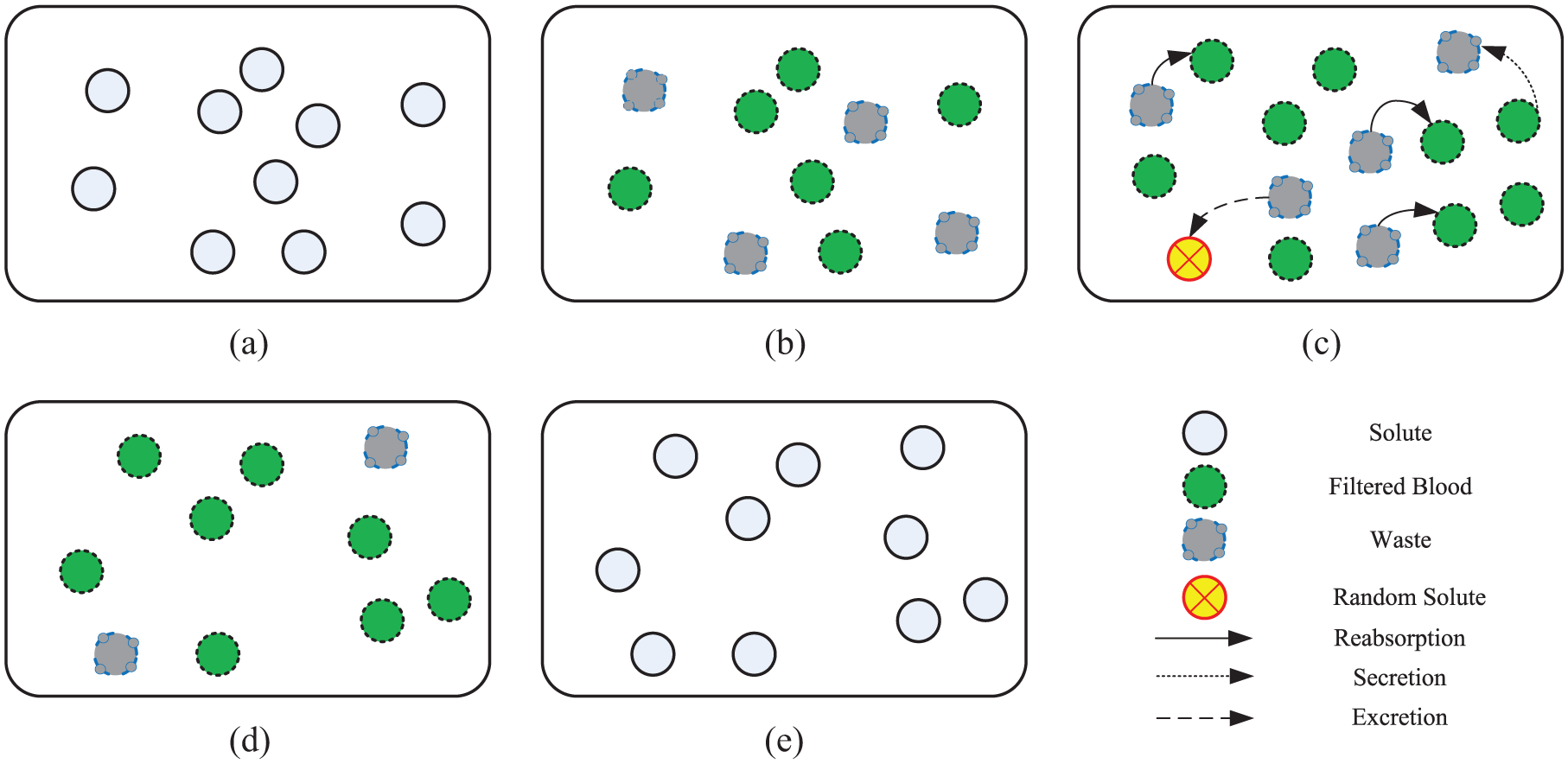
Schematic of KA process: (a) initial population, (b) filtration stage, (c) reabsorption, secretion and excretion, (d) new solutes placement, (e) new population (Jaddi et al., 2017).
Problem statement
Power system model
The complex nonlinear model related to an m machine interconnected power system can be described by a set of differential algebraic equations by assembling the model for each generator, load, and other devices, such as controls in the system, and connecting them appropriately via the network algebraic equations (Ekinci, 2015a). Nonlinear dynamic equations of each machine can be summarized as (Mondal et al., 2014)




where for the ith machine,
PSS structure
The main function of a PSS is to operate an auxiliary stabilizing signal through the excitation system in order to damp out the generator rotor oscillations (Sauer and Pai, 1998).
The structure of a widely used conventional lead-lag PSS is given by

This structure consists of a control gain
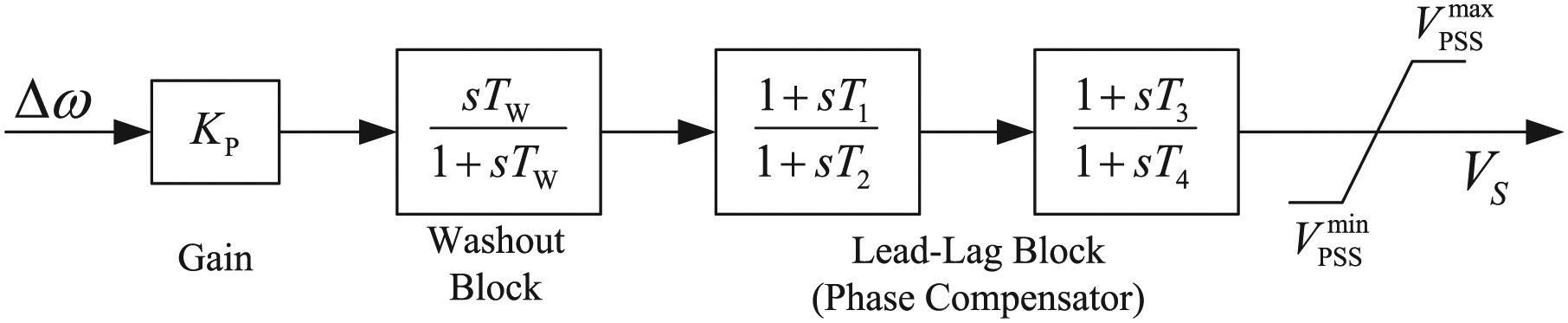
Structure of power system stabilizer.
Linearized system model
In the design of PSSs, typically the linearized incremental models around an equilibrium point are used (Mondal et al., 2014). By the linearization of the power system equations, as explained in Mondal et al. (2014), and by the addition of PSS equations, the linearized power system model yields the following state equation

where,

where

Objective function and PSS tuning using KA
For the linearized system model presented previously, all the eigenvalues of the system can be evaluated. The proposed method aims to search for the optimal parameters set of the PSSs so that a comprehensive damping index (CDI) (El-Zonkoly, 2006) can be minimized

where
Minimizing the CDI is subjected to the following boundaries
Typical ranges of the optimized parameters are
Considering the objective function given in (11), the proposed approach employs KA technique to solve this optimization problem and search for an optimal set of PSS parameters (
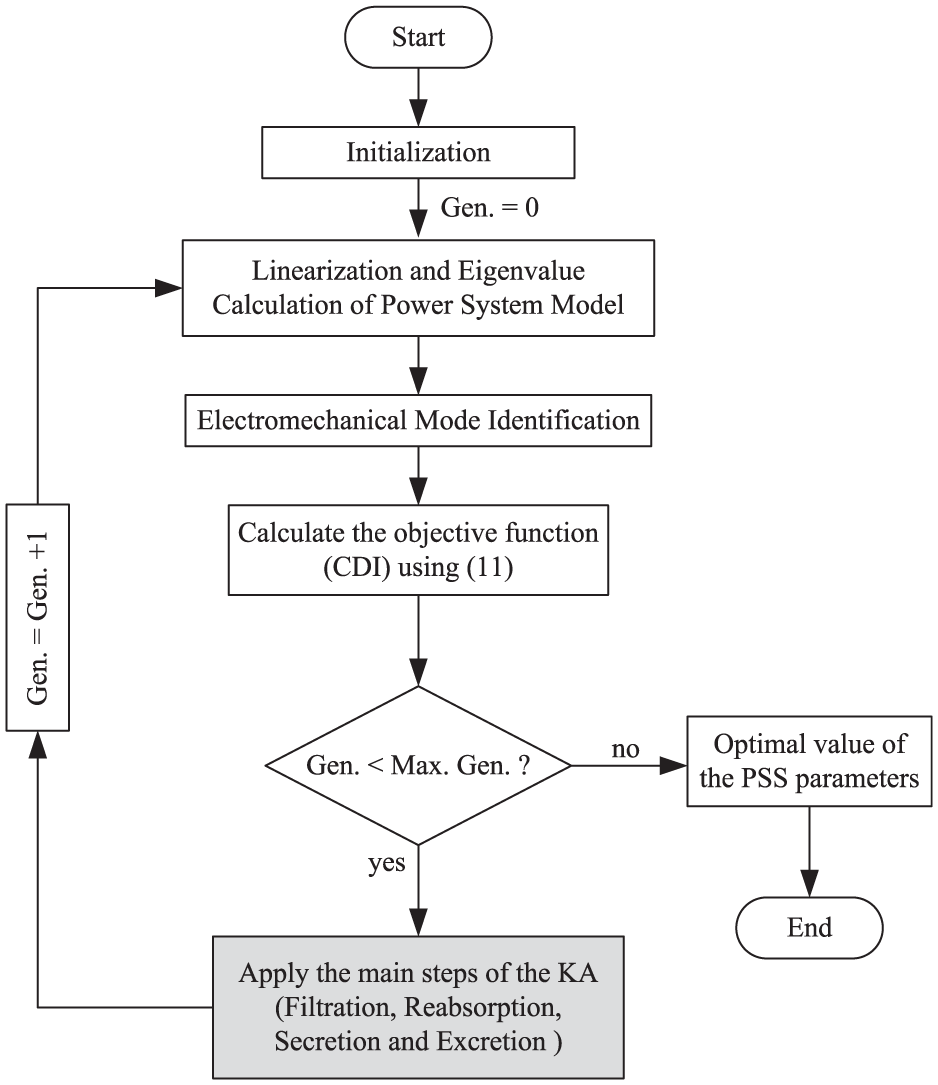
Flowchart of the proposed KA-based PSS design.
Case study
In this paper, the New England 16-machine, 68-bus system is used to illustrate the performance of the proposed algorithm. This system is large and close to actual power systems. A single line diagram of the test system is shown in Figure 6. It is a reduced-order model of the New England and New York interconnected power systems. The entire system can be divided into five areas: (i) New England (G1-G9), (ii) New York (G10-G13), (iii) Generator G14, (iv) Generator G15 and (v) Generator G16. The bus, line and generator data of the test system are all given in Rogers (2000), Pal and Chaudhuri (2005) and Ekinci (2015a).
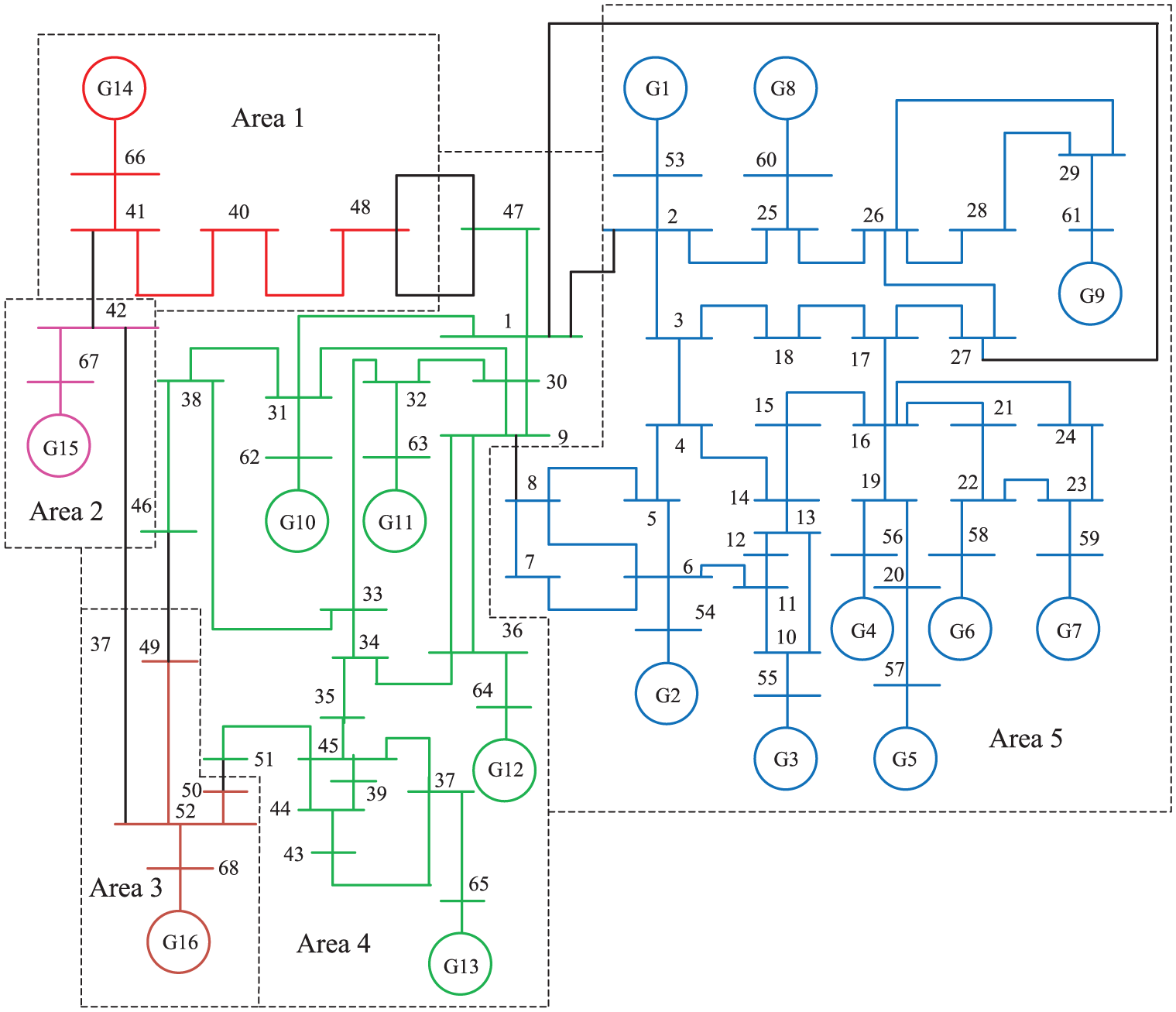
Single line diagram of 16-machine 68-bus New England and New York interconnected system.
System analysis without PSSs and optimal PSS location
By using PowSysGUI operated at MATLAB (Ekinci et al., 2017) we obtain the power system eigenvalues, whose dominant value, the damping coefficient and the natural frequency of oscillation associated with them are shown in Table 1. Besides the two zero eigenvalues (because of zero-damping), the system has 15 oscillatory electromechanical modes that are either unstable modes or have damping ratios less than 5%.
Dominant eigenvalues, damping ratios, oscillation frequencies in a 16-machine system.
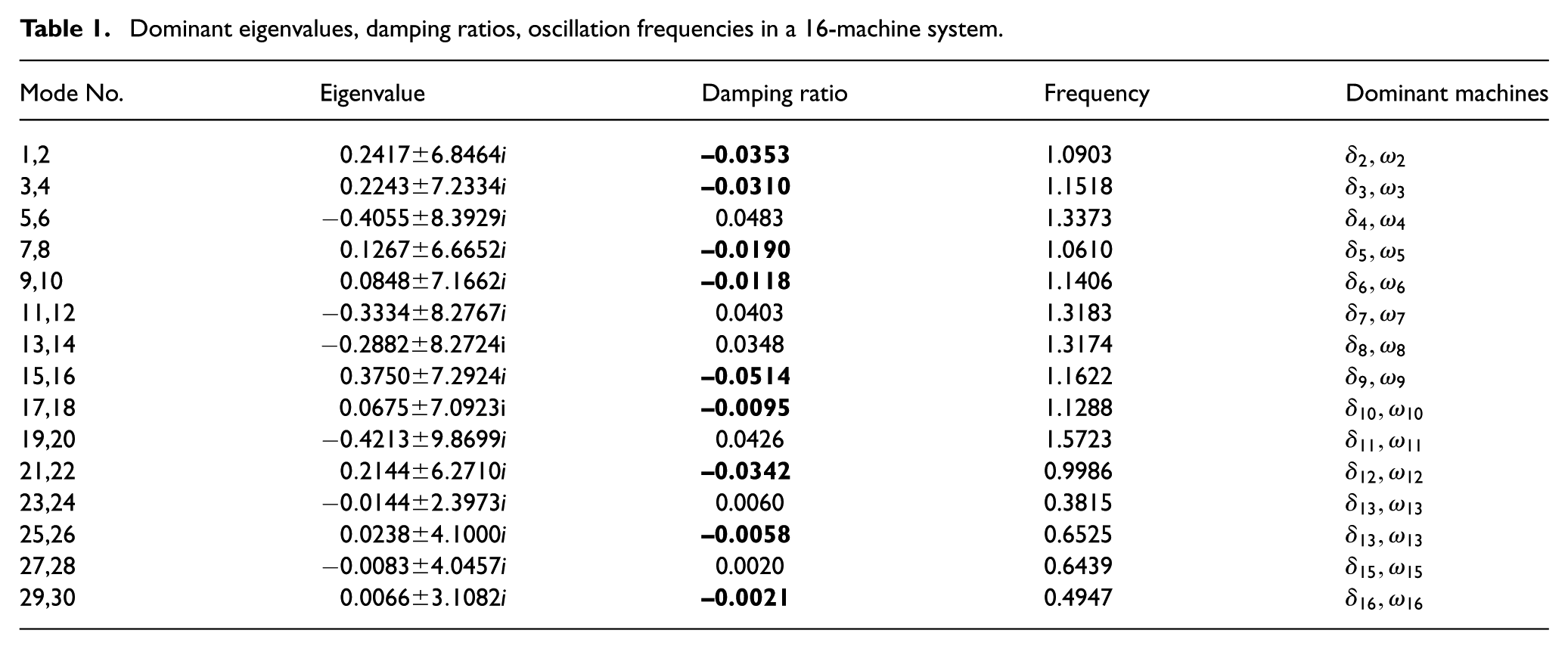
Without PSSs, the system is unstable. In order to lead the system to stability, it is proposed the inclusion of PSSs, whose parameters will be adjusted in accordance with the procedure described previously. The participation factor method is widely used to find the optimum PSS locations (Hsu and Chen, 1987; Keumarsi et al., 2014). Using the participation factor analysis, the dominant machines for each mode are also shown in Table 1. In this study, only the participation factors greater than 0.7 are taken into account. Table 1 shows that generators 1 and 14 does not have maximum participation in any mode. Therefore, the PSSs will be ineffective if they are installed in these generators. Based on the discussion above, 14 generators are mainly involved in the system dominant modes and they must be equipped with PSSs.
Application of KA technique to PSS design
In this paper, there are
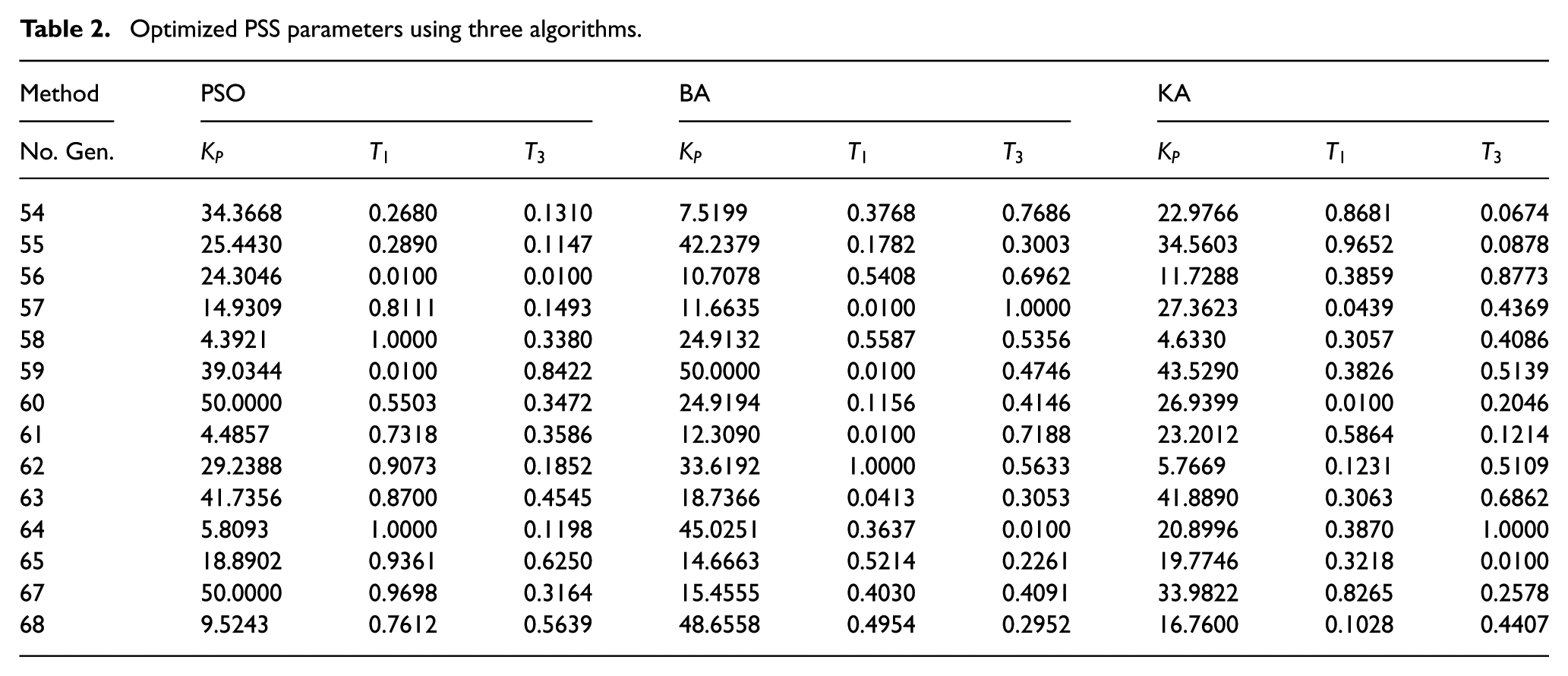
The KA was implemented in MATLAB software to resolve the optimization problem and examine the optimal set of stabilizers parameters. It is significant to underline that KA is run a number of times and later the optimal set of PSS parameters is selected. The optimization of PSSs parameters is performed through the assessment of the objective function as given in (11) and the final values of the optimized PSSs parameters using PSO, BA (see Kennedy and Eberhart (2001), Panda et al. (2008), Yang (2010) and Elsisi et al. (2016) for more details about the problem solution for PSO and BA) and the proposed KA methods are shown in Table 2.
Optimized PSS parameters using three algorithms.
Convergence test and computation time
The convergence characteristics of PSO, BA and proposed KA methods are shown in Figure 7. From the convergence plot, the KA technique has better convergence rate (159 iterations) than PSO (176 iterations) and BA (180 iterations).
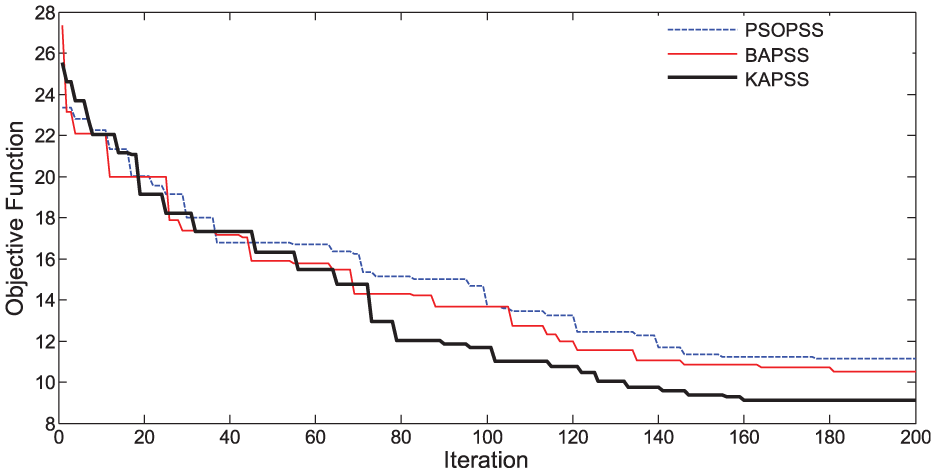
Objective function variations with different algorithms.
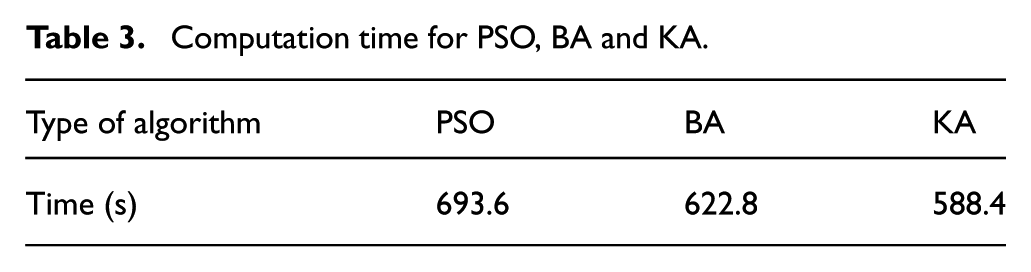
The computation time of the 16-machine, 68-bus power system is shown in Table 3. As can be seen from Table 3, the simulation time of KA is less than PSO and BA methods. This clearly shows that the KA has got a faster convergence. Thus, systems employing KA technique can save considerable amount of time and therefore are more feasible than other techniques for online optimization with high speed processors.
Computation time for PSO, BA and KA.
Eigenvalue analysis
The eigenvalue analysis investigates the dynamic behavior of a power system under different characteristics frequencies (‘modes’) (Afzalan and Joorabian, 2013). The eigenvalues indicate the system stability and how it is becoming unstable. In addition, it is not only required that all modes are stable in a power system but also desired that all electromechanical oscillations are damped out as quickly as possible. In this paper, when viewed from this aspect the eigenvalue analysis is used to show the robustness and improvement of power system stability using the proposed KA-based stabilizers.
Figures 8(a)–(d) give the damping ratios and oscillation frequencies of electromechanical mode eigenvalues without PSSs and with the optimized PSSs (PSOPSS, BAPSS and KAPSS), respectively. When PSS is not installed, it can be seen from Figure 8(a) that some of the modes are poorly damped
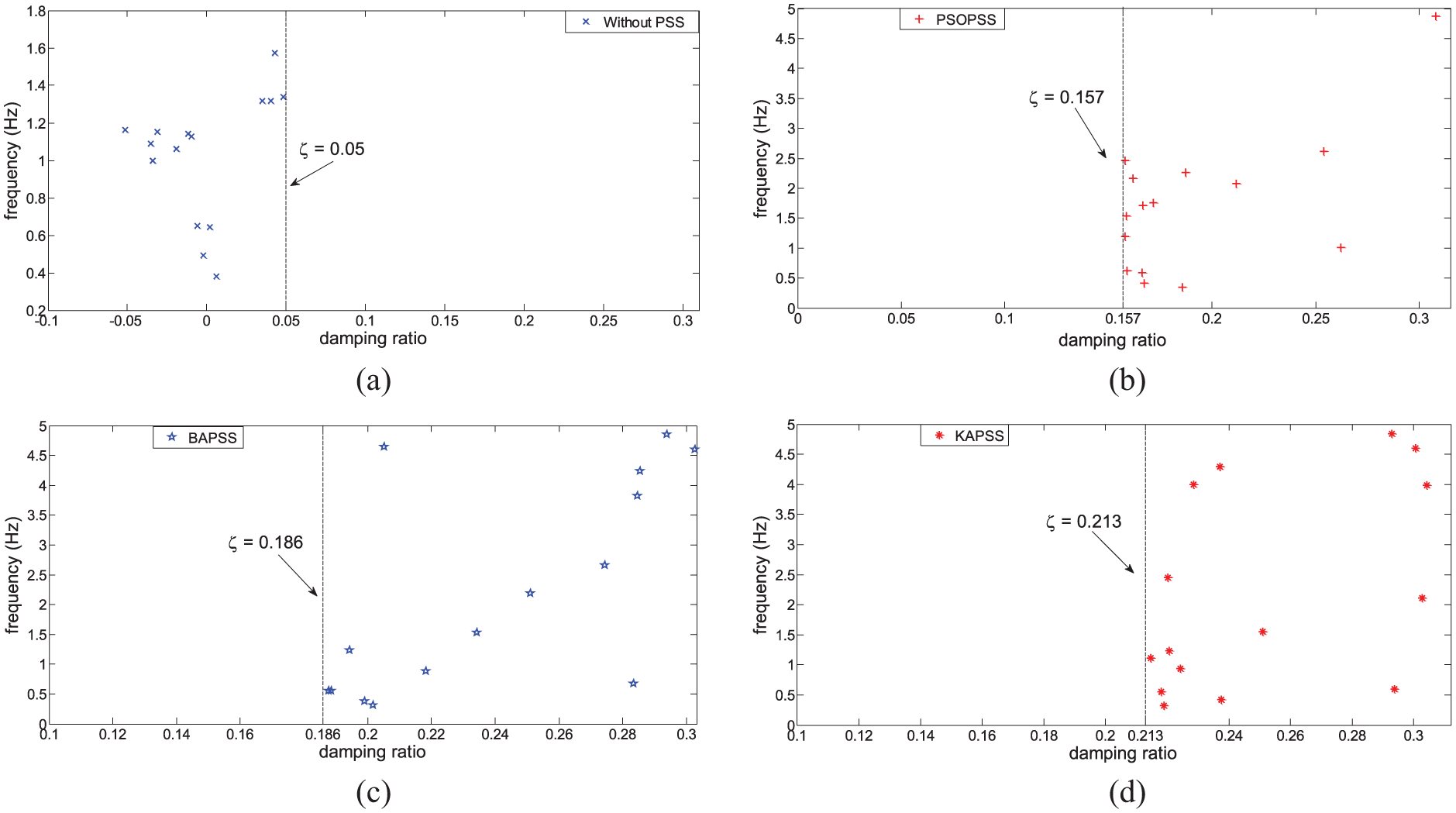
Dominant eigenvalues (a) without PSSs, (b) with PSOPSS, (c) with BAPSS and (d) with KAPSS.
Simulation results
In this paper, the effectiveness of the proposed KA-based PSS has been studied through detailed non-linear time domain simulation studies under large and small disturbances. The simulation studies have been carried out in the MATLAB/Simulink environment. For illustrating the efficacy of the proposed stabilizer in this work, the results pertaining to four different situations are presented. The situations are: (a) study system without any PSS, (b) study system with PSO-based PSS, (c) study system with BA-based PSS and (d) study system with KA-based PSS. The following types of disturbances are considered:

Power angle response of G6 (relative to G1) for large disturbance.
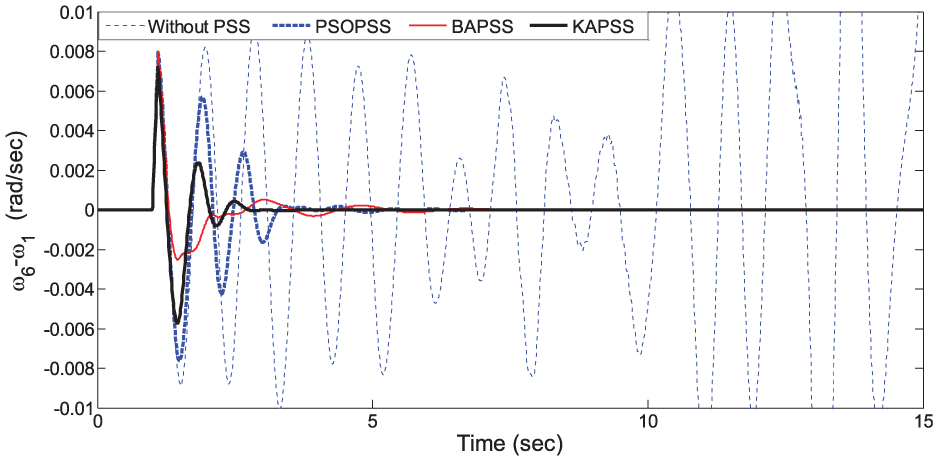
Speed deviation response of G6 (relative to G1) for large disturbance.
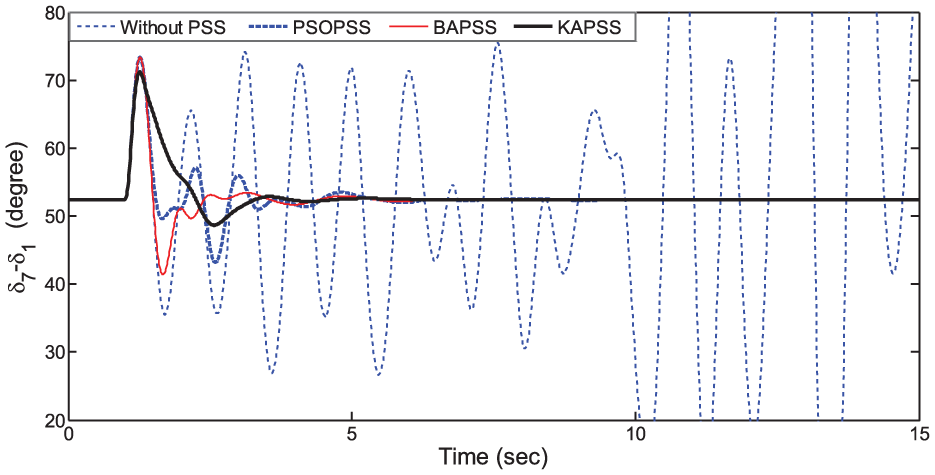
Power angle response of G7 (relative to G1) for large disturbance.
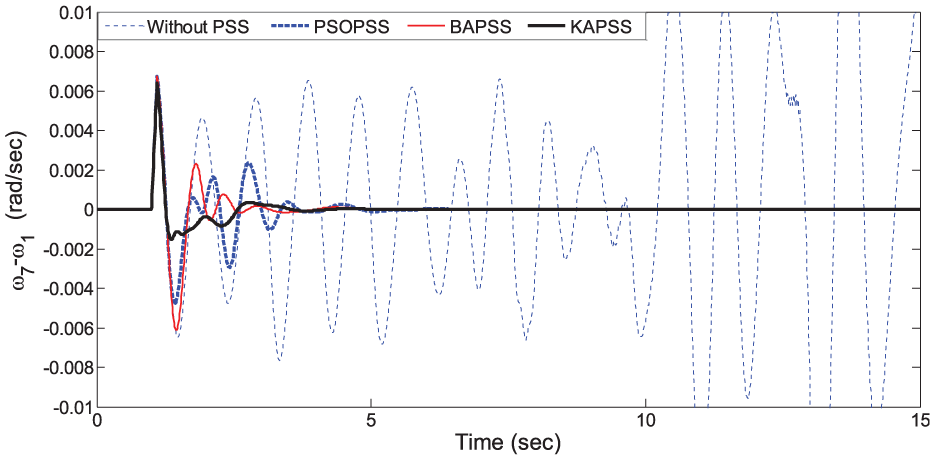
Speed deviation response of G7 (relative to G1) for large disturbance.
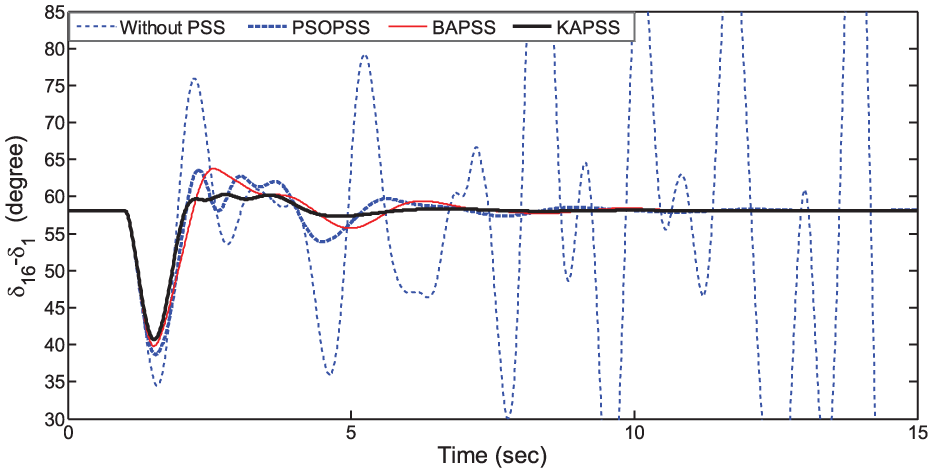
Power angle response of G16 (relative to G1) for large disturbance.
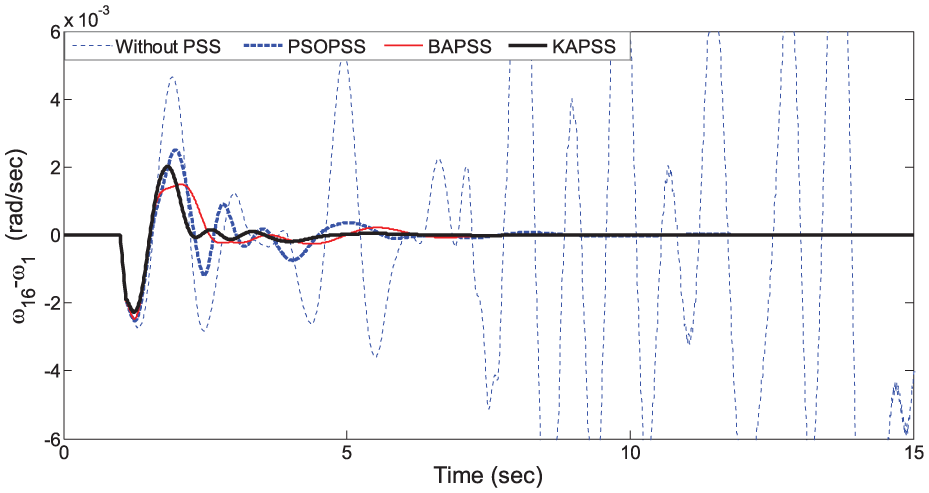
Speed deviation response of G16 (relative to G1) for large disturbance.
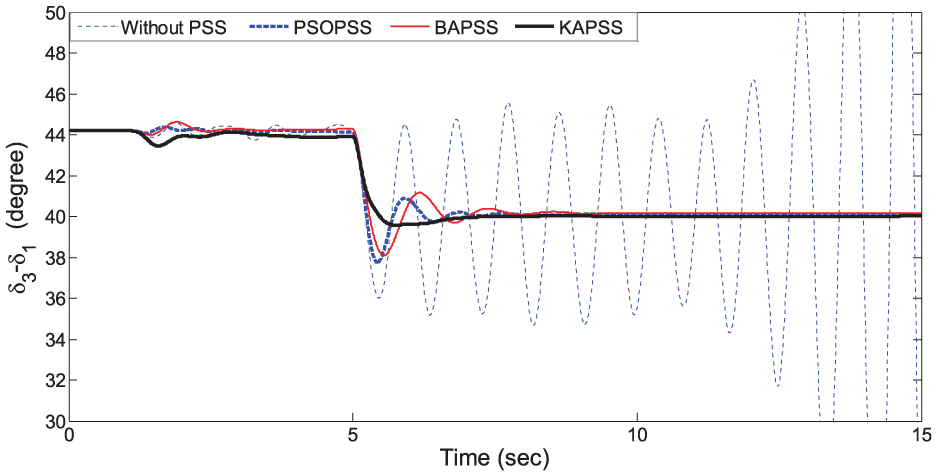
Power angle response of G3 (relative to G1) for small disturbance.
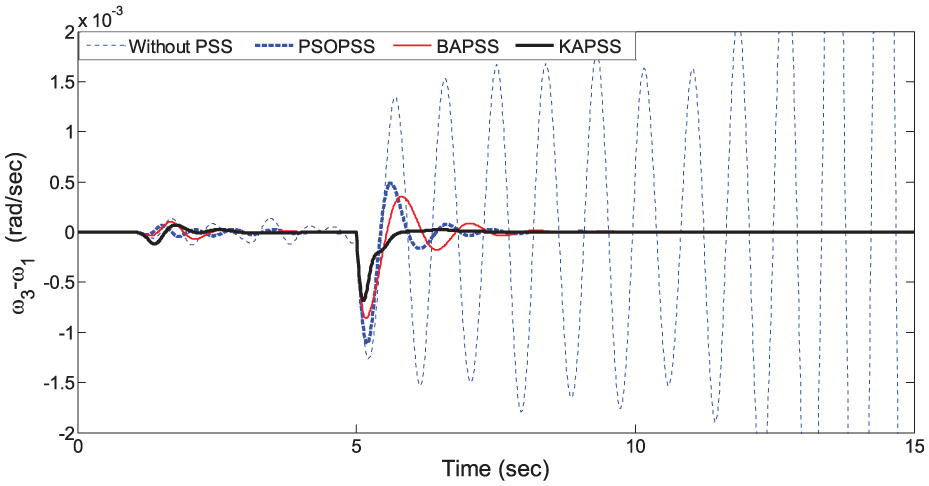
Speed deviation response of G3 (relative to G1) for small disturbance.
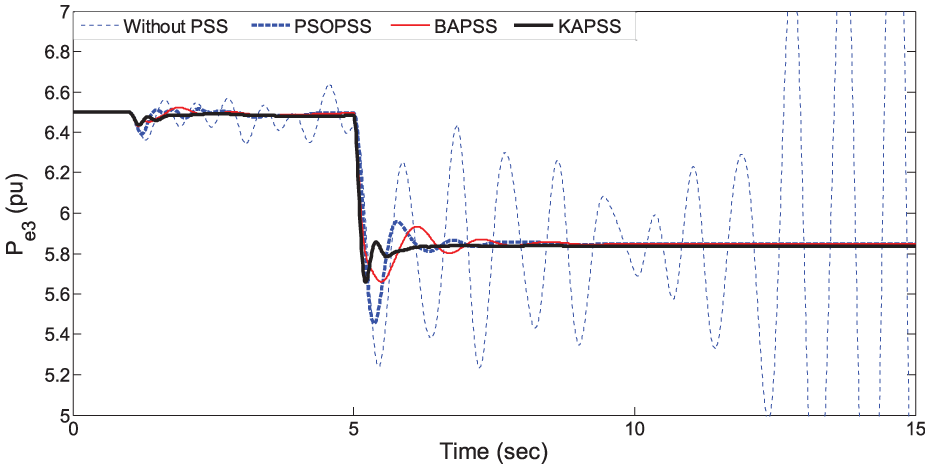
Electrical power response of G3 for small disturbance.
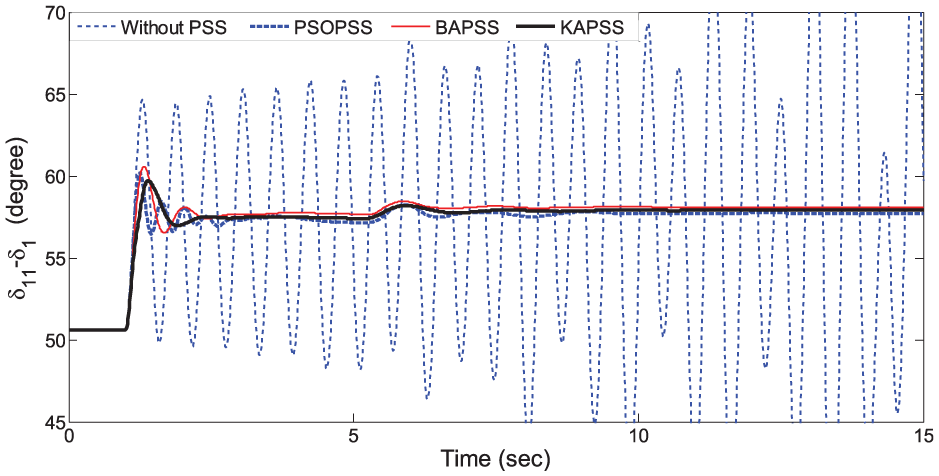
Power angle response of G11 (relative to G1) for small disturbance.
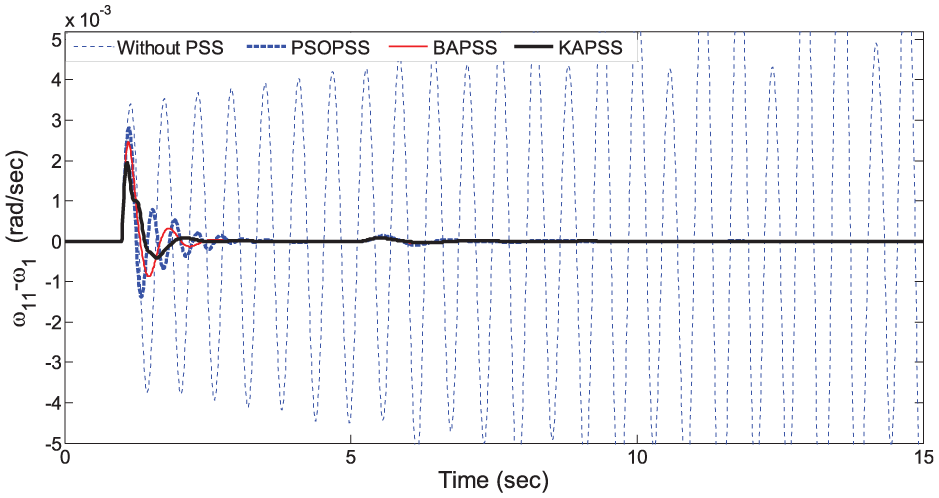
Speed deviation response of G11 (relative to G1) for small disturbance.
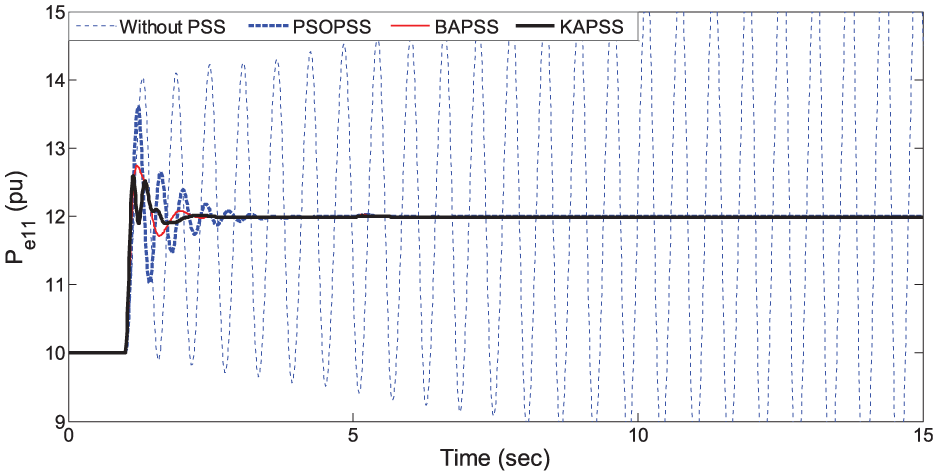
Electrical power response of G11 for small disturbance.
Investigation of robustness
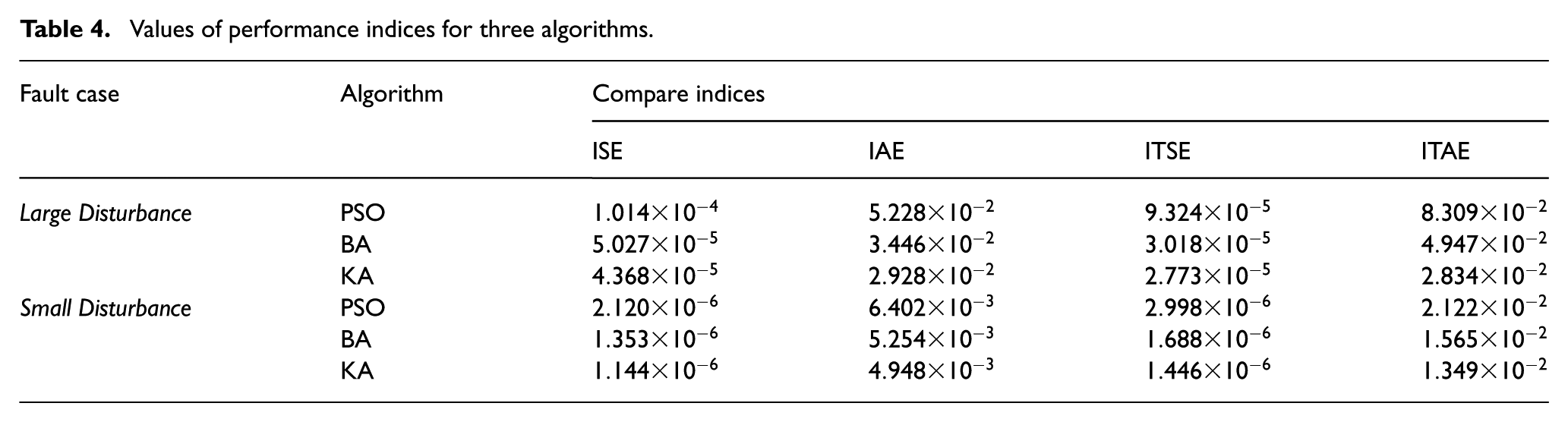
The robustness of the proposed controller is demonstrated through four performance indices. Integral of squared error (ISE), integral of absolute error (IAE), integral of time weighted squared error (ITSE) and integral of time multiplied absolute error (ITAE) are being used as follows (Dorf and Bishop, 2010; Ekinci and Demiroren, 2015)




It is noteworthy that the lower the value of these indices are, the better the system response in terms of time domain characteristics. The numerical results of the performance and robustness for large and small disturbances are listed in Table 4. It can be seen that the values of these system performance indices with the KAPSS are smaller compared with those of PSOPSS and BAPSS. This demonstrates that the overshoot, settling time and speed deviations of all units are greatly decreased by applying the proposed KA-based tuned PSSs.
Values of performance indices for three algorithms.
Conclusions
In this paper a new meta-heuristic optimization technique constructed based on the functionality of the kidney in a human body is proposed for optimal designing of PSSs parameters. For the design problem of the PSSs parameters, a parameter-constrained, eigenvalue based objective function is used to improve the dynamic performance of power system. Then, KA is successfully applied to seek for optimal parameters. The performance of the proposed controller is tested on a multi-machine power system and compared with PSO and BA methods. It was observed from eigenvalue analysis and nonlinear time-domain simulation results that the KAPSS significantly suppressed the electromechanical low frequency oscillations of the power angle and rotor speed with respect to the PSOPSS and BAPSS. Finally, the system performance characteristic regarding ‘ISE’, ‘IAE’, ‘ITAE’ and ‘ITSE’ indices reveal that by using the proposed KAPSS, the overshoot, settling time and power system low frequency oscillations are immensely diminished during large and small disturbances.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.