
Abstract
In this paper, a novel discontinuous second-order sliding mode control approach has been developed to handle sliding mode dynamics with a nonvanishing mismatched disturbance by using Lyapunov theory and a finite-time disturbance observer. Firstly, the finite-time disturbance observer is designed to estimate the nonvanishing mismatched disturbance. Secondly, a virtual controller has been constructed based on the estimated value such that the sliding variable can be stabilized to zero in a finite time. Then, the real discontinuous controller is designed to guarantee that the virtual controller can be well tracked in a finite time. Lyapunov analysis also verifies the finite-time stability of the closed-loop sliding mode control system. The developed discontinuous second-order sliding mode control method possesses two appealing features including strong robustness with respect to the matched and mismatched nonvanishing disturbances, and relaxation on the constant upper bound of uncertainties widely used in a conventional second-order sliding mode. Finally, an academic example is illustrated to verify the effectiveness of the proposed method.
Introduction
There will always exist some discrepancies between an actual system and its mathematical model (Fu et al., 2015; Wang et al., 2018; Zhang et al., 2018). These discrepancies usually consist of exogenous disturbances, parameter perturbations and system uncertainties, which may bring some adverse effects on the control performance of closed-loop systems (Wang et al., 2017a; Xu et al., 2016; Yang and Ding, 2017). Aiming to diminish these negative effects, research on nonlinear systems with disturbances and uncertainties has been an active topic in past decades. Up to now, several control methods have been proposed, such as backstepping control (Xu et al., 2017; Yu and Zhong, 2011; Zhang and Shen, 2017), finite-time control (Fu et al., 2017; Shen et al., 2017), adaptive control (Sun et al., 2017), optimization (He and Gonzalez, 2017; Zhu et al., 2018), fuzzy control (Wang et al., 2017; Xie et al., 2014), nonlinear
The design of a SM controller contains two major parts, constructing the SM surface and designing reaching law. The SM surface is constructed to ensure the closed-loop system can possess the desired dynamic behaviour, while the reaching law drives the system states to the SM surface and then to stay on it. It is worth noting that conventional SMC algorithms always employ a linear switching surface, which offers exponential convergence at best. Since the convergence performance is one of the important indexes for a control system, a finite-time control technique has also been introduced in SMC (Zhao et al., 2018). By constructing a nonlinear switching surface, the terminal sliding mode (TSM) was developed by Man and Yu (1997), where the states can converge to the origin along the sliding mode surface in a finite time.
However, there exist two potential restrictions in widespread applications of conventional first-order SMC (Ding et al., 2015). On the one hand, conventional first-order SMC requires the relative degree of the sliding variable to be one, which brings some obstacles for choosing the desired SM surface. On the other hand, the chattering problem always occurs in conventional first-order SMC. It may cause structure damage, especially in mechanical and aerospace industries (Utkin, 2013). One solution to reduce the chattering is to replace the sign function with a saturation function, while the price is that the robustness of the closed-loop system will be significantly diminished. It should be pointed out that the disturbance observer (DOB) based SMC can compensate disturbances and uncertainties, which can be regarded as an alternative approach to reduce chattering (Wang et al., 2016, 2017b). In addition, the second-order sliding mode (SOSM) is also an effective method to overcome the chattering.
The SOSM control methodology was developed by Emelyanov et al. (1986); Levant (2005a). The basic idea of SOSM can be summarized as follows. Regarding the derivative of a real controller (i.e.
Nevertheless, there are also some problems in SOSM control methodology. Firstly, the dynamics of SOSM are always obtained by directly taking a two times derivative on the sliding variable. As a matter of fact, there always exists some system uncertainties and exogenous disturbances in the first-time derivative of a sliding variable (i.e.
Inspired by Ding and Li (2017); Ding et al. (2015), a novel SOSM control approach will be developed for a class of SM dynamics with nonvanishing matched and mismatched disturbances by using finite-time Lyapunov theory and Arie Levant’s differentiator (Levant, 2003; Shtessel et al, 2009). The detailed control design has three steps. Since the nonvanishing mismatched disturbance is always unknown, it will bring obstacles for control design. Arie Levant’s differentiator will be first used for estimating the nonvanishing mismatched disturbance in a SM dynamic system. And then, with the help of the estimated value, a virtual control law is constructed to compensate for the nonvanishing mismatched disturbance and stabilize the sliding variable in a finite time. Finally, the real controller is designed such that the virtual controller can be tracked in a finite time. Under the proposed discontinuous SOSM controller, the SM variable will be eventually stabilized to zero in a finite time. The contribution of this paper can be summarized as follows. Firstly, comparing with existing SOSM methods, the proposed discontinuous SOSM method can significantly reduce the uncertainties in the control channel such that the switching gain can be chosen to be a smaller one. Secondly, the given method can be used to deal with the nonvanishing mismatched disturbance existing in the SM dynamics. Thirdly, the uncertainties in SOSM dynamics considered in this paper are only required to be bounded by positive functions rather than positive constants.
The rest of the paper is organized as follows. The ‘Problem formulation’ section introduces the problem formulation briefly. The ‘Discontinuous SOSM controller design’ section shows the explicit steps of designing discontinuous SOSM controller. The ‘Example’ section gives an example system to verify the effectiveness of the proposed method. Finally, the ‘Conclusion’ section makes a concise conclusion.
Problem formulation
Consider the following nonlinear uncertain system described by

where
For the system given by equation (1), we assume that the sliding variable s has a relative degree of two with respect to controller u. Then, taking directly a two times derivative of s, we can obtain

with smooth functions

As we know, the SOSM controller u is utilized to eliminate the effect of uncertainties
It should be noted that

It can be clearly seen from Assumption 2 that the uncertainty
Nevertheless, the two times derivative on s in SOSM dynamics will bring the certainties/uncertainties into the control channel. It implies that

where

As a matter of fact, the uncertainties
The following is a simple example to illustrate the above descriptions.

where
we can let

where
As a comparison, we will use the method proposed by Ding and Li (2017) to obtain other SM dynamics. Let

with
It can be clearly seen that the uncertainty
However, it should be pointed out that the method proposed by Ding and Li (2017) cannot be applied in the presence of nonvanishing mismatched disturbances, because the disturbances will not vanish as the states approach zero. To tackle this problem, we further consider the following SOSM dynamics with a nonvanishing mismatched disturbance

where

The goal of this paper is to design a suitable discontinuous SOSM controller for the system given by equation (7) such that
Finally, three lemmas that serve as the basis of the key tools for the main results are listed. To simplify the expression, we denote

with any



Discontinuous SOSM controller design
In this section, the SOSM control scheme will be proposed for the sliding mode dynamics given by equation (7) by using a backstepping-like method. The sketch of the control design can be summarized as follows. First of all, design a disturbance observer to estimate the unknown disturbance
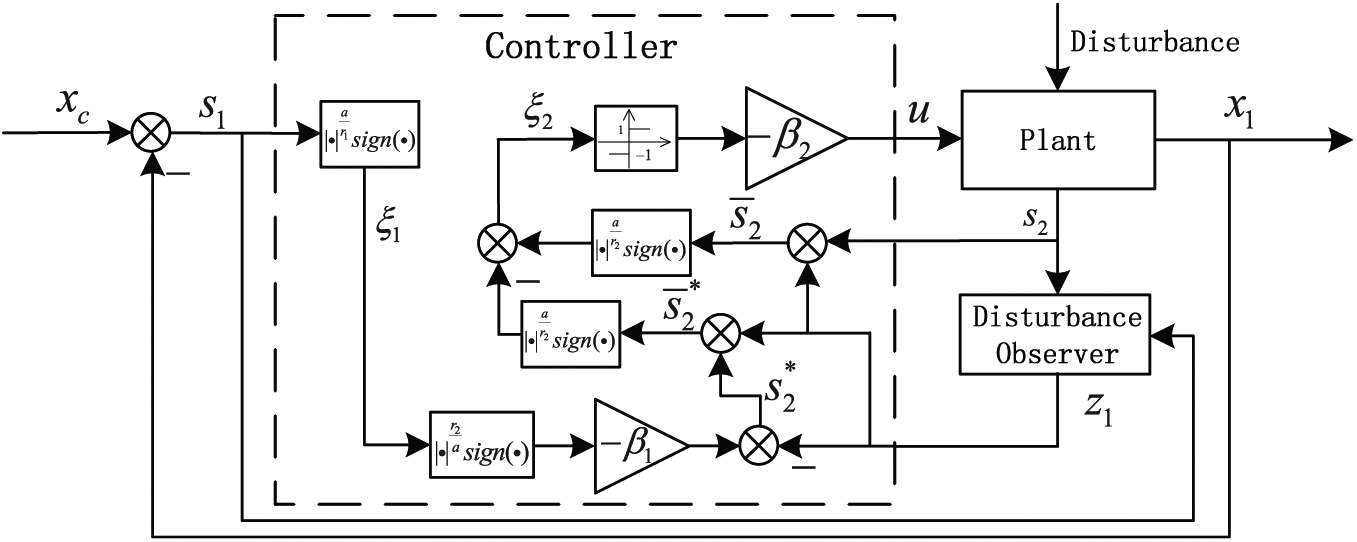
Block diagram of the controller design.
Finite-time disturbance observer design
The finite-time disturbance observer can be designed by modifying Arie Levant’s differentiator (Levant, 2003; Shtessel et al, 2009) as follows

where
Similarly, we also have

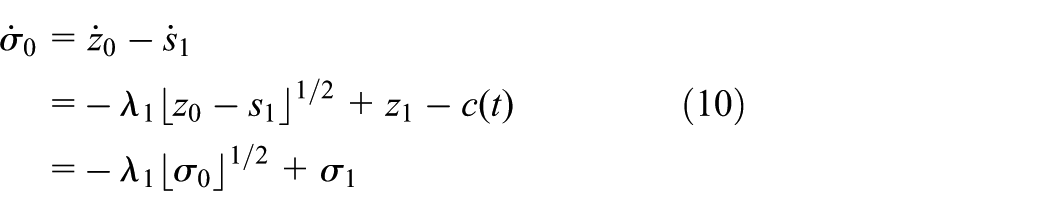
which is understood in the Filippov sense (Filippov, 1988). Combining equations (10) and (11), we have the following differential inclusion

The rest of the proof actually does not differ much from that of Theorem 6.4 in the work by Shtessel et al. (2013) and thus is omitted here. This completes the proof.▪
Controller design
Note that

If we can design a SOSM controller to stabilize the system given by equation (12), then the system given by equation (7) can also be stabilized by the same controller.
From Lemma 4, it can be concluded that the observation error

On this basis, we will propose the following main result of the paper.

with
In the following, the discontinuous SOSM controller will be constructed by using the adding a power integrator technique (Qian and Lin, 2001). The proof will be given in three steps.
(1) Step 1. We choose a

with
where

with

(2) Step 2. Constructing

where

Taking the derivative of
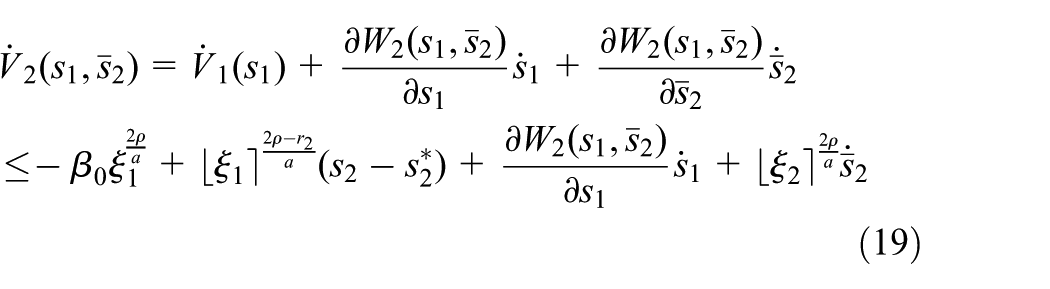
where
Note that

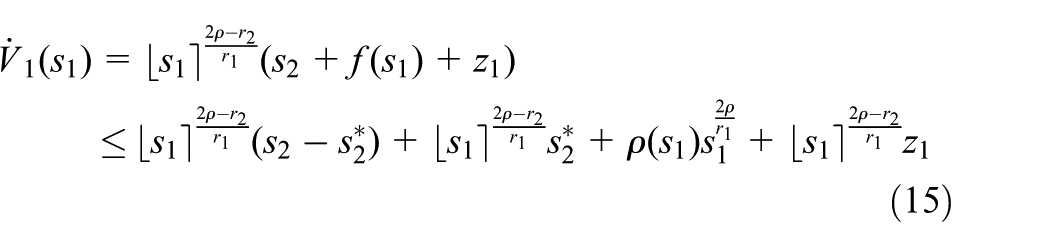
From Lemma 1, one has

This implies that the following estimate holds

Applying Lemma 2 to equation (20), it can be concluded that

with any

By a simple calculation, we have

with

On the other hand, note that
By Lemma 1, we can get

Taking

By using Lemma 3, we also have
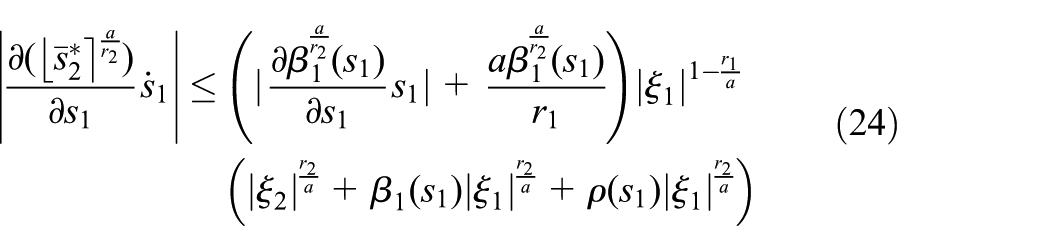
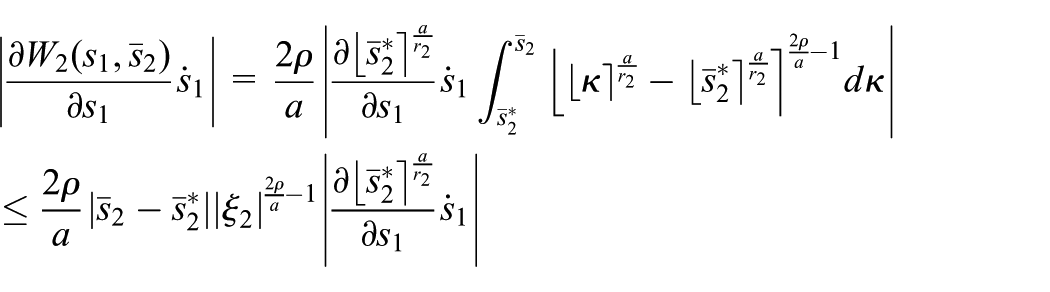
Applying Lemma 2 to equation (24), it can be concluded that there exist two positive functions

From equations (22) and (25), one obtains
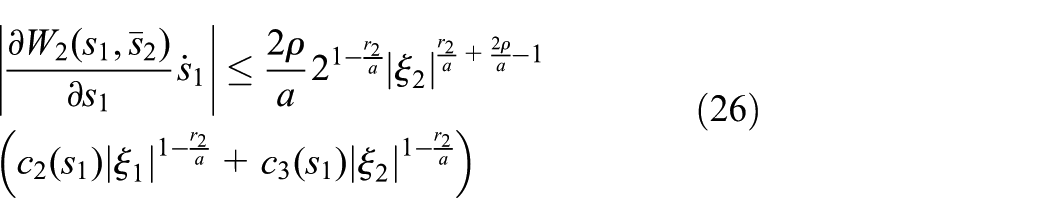
Applying Lemma 2 again to equation (26) yields
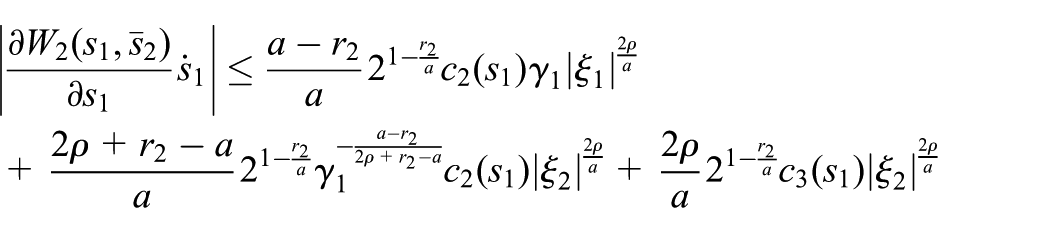
with any

equation (26) can be estimated as

with

Finally, substituting equations (21) and (27) into equation (19) gives

It can be easily verified from equation (9) that

with

Putting equation (29) into equation (28) obtains

By the fact that

it can be verified that

Letting

we can obtain

Note that

It follows from the finite-time Lyapunov theory given by Bhat and Bernstein (2000) that the system (13) can be globally finite-time stabilized by the discontinuous controller (29). Note that the discontinuous controller (29) can be written as equation (14). It also implies that the reduced system (13) can be globally finite-time stabilized by the discontinuous controller (14).
(3) Step 3. Note that the system (7) can be rewritten as the system (12) by using the finite-time disturbance observer (9). Moreover, the disturbance
Choose a Lyapunov function as

Taking a derivative of

By the fact that the variables

It can be concluded from equation (30) that the system (12) will not escape to infinity during the time interval
Example
Consider a nonlinear system with a nonvanishing mismatched disturbance as follows

where
Choose the sliding variables as

Based on equations (31) and equation (32), we can obtain the SOSM dynamics described by

with

with

Meanwhile, the twisting algorithm is employed here to show a comparison. From the conventional SOSM theorem, by letting

with

where

with
Simulation with a bounded disturbance d2(t)
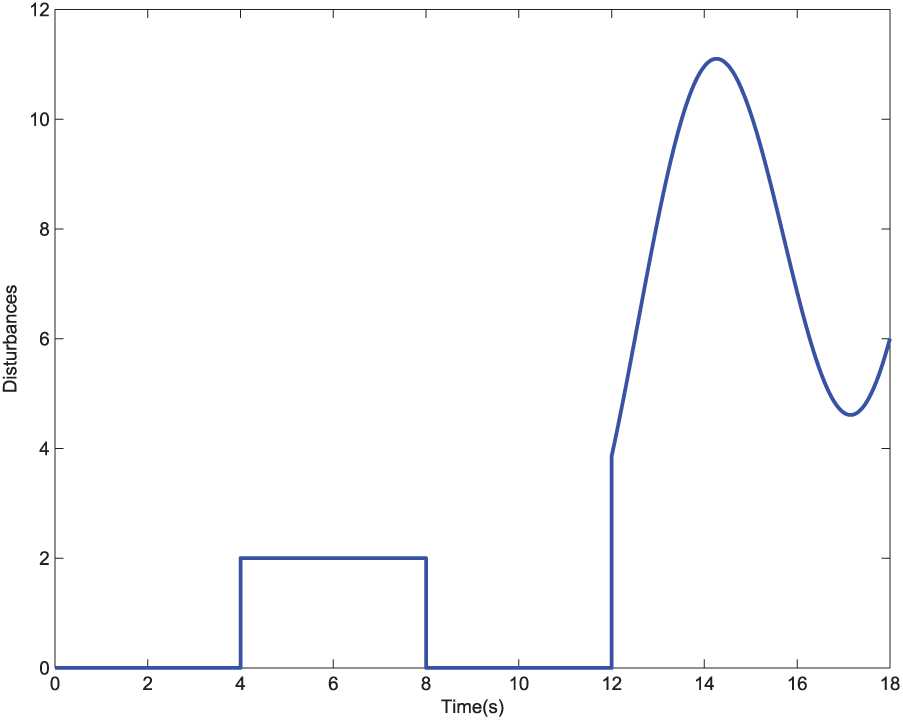
It is assumed that
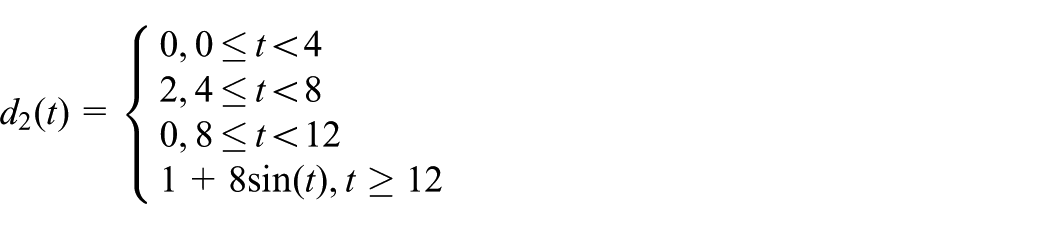
as shown in Figure 2. The parameters of the controller (33) are chosen as
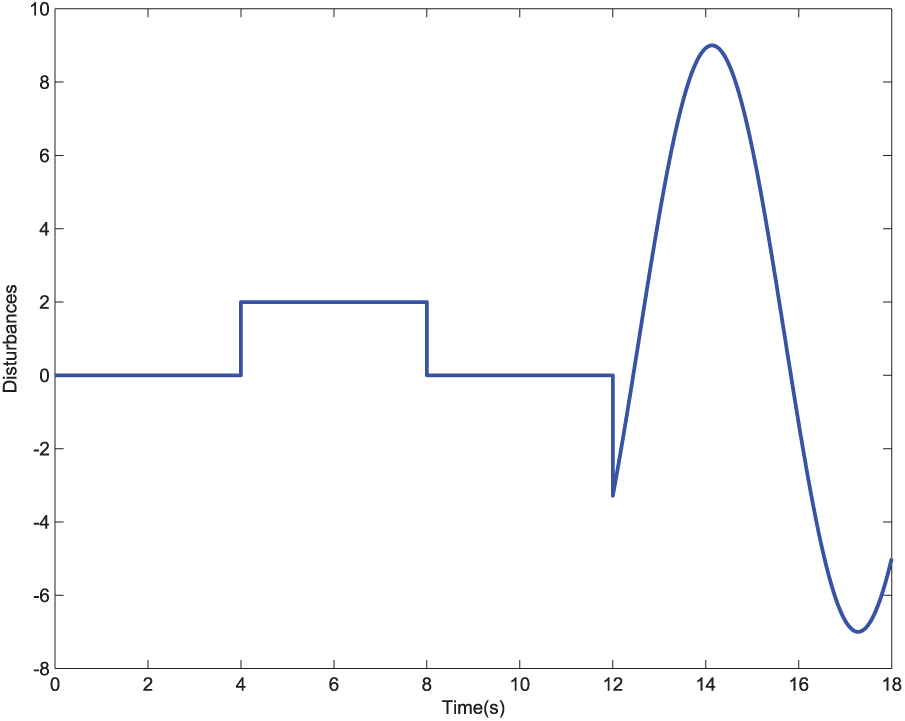
Time history of the bounded disturbance
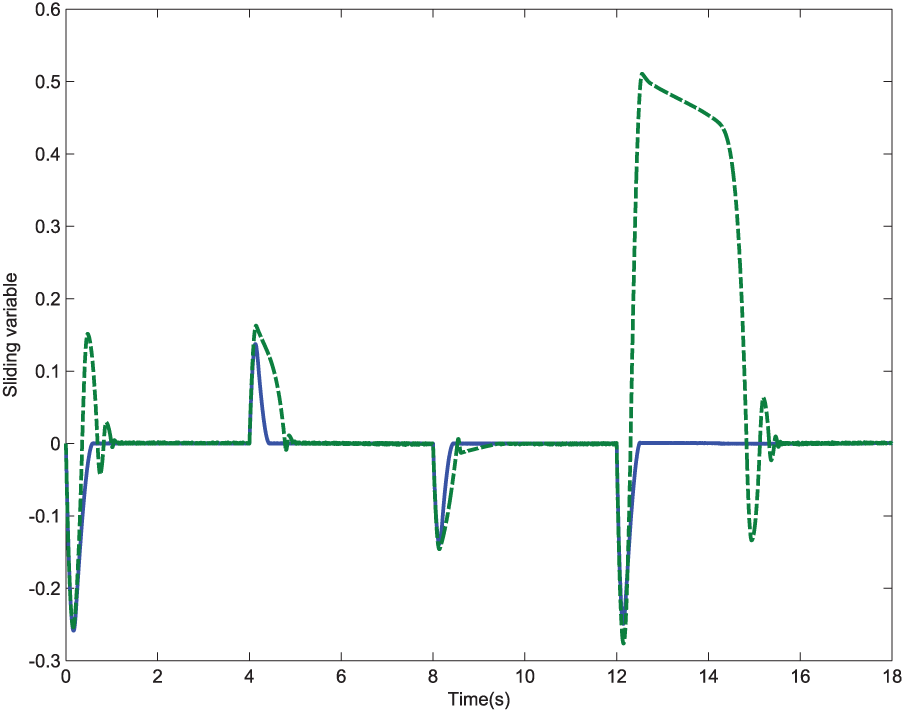
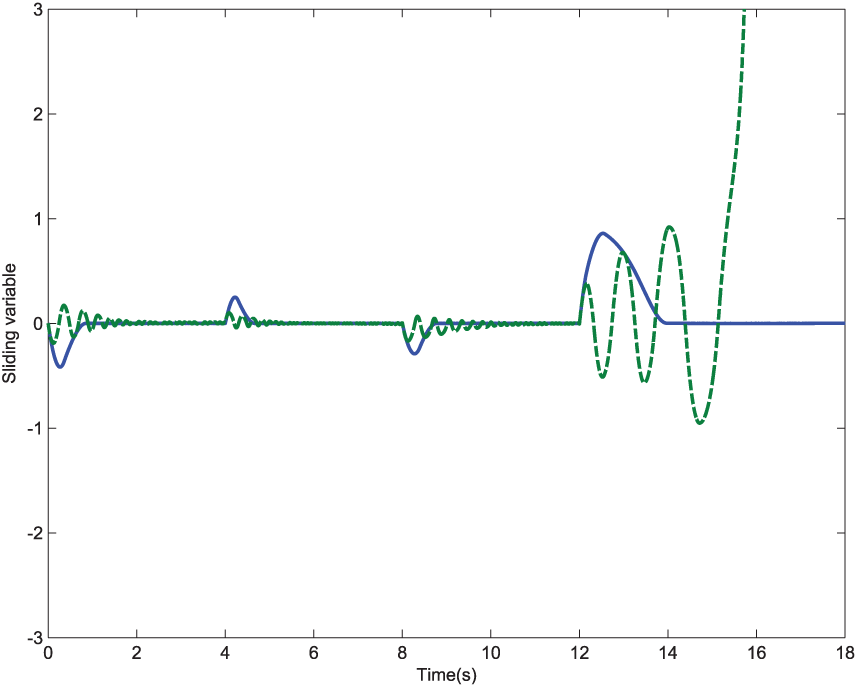
Time history of a sliding variable under the controllers given by equations (33) (solid line) and (34) (dotted line) with initial states
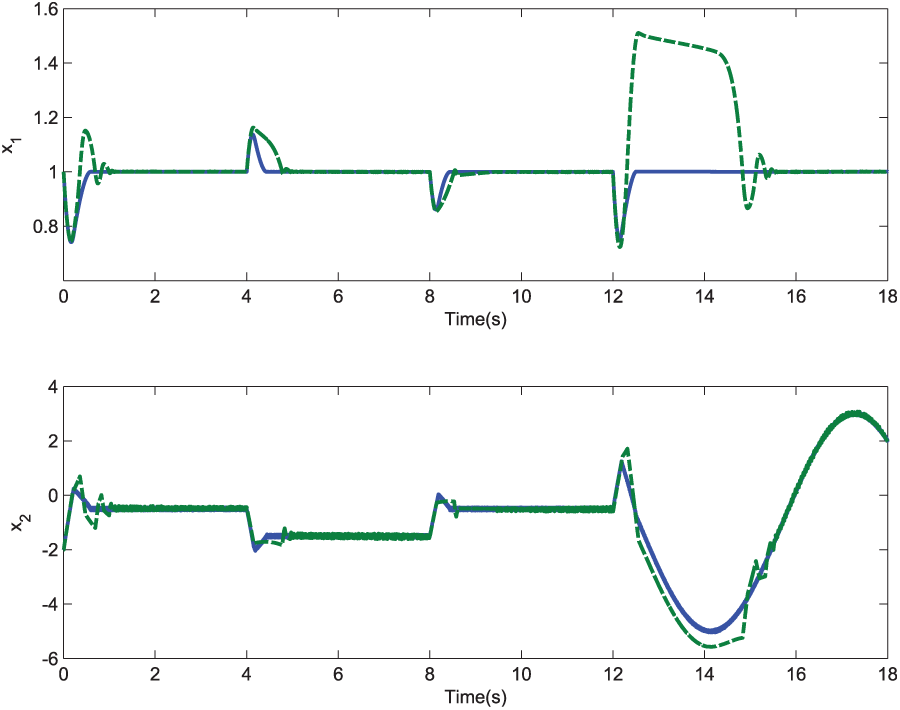
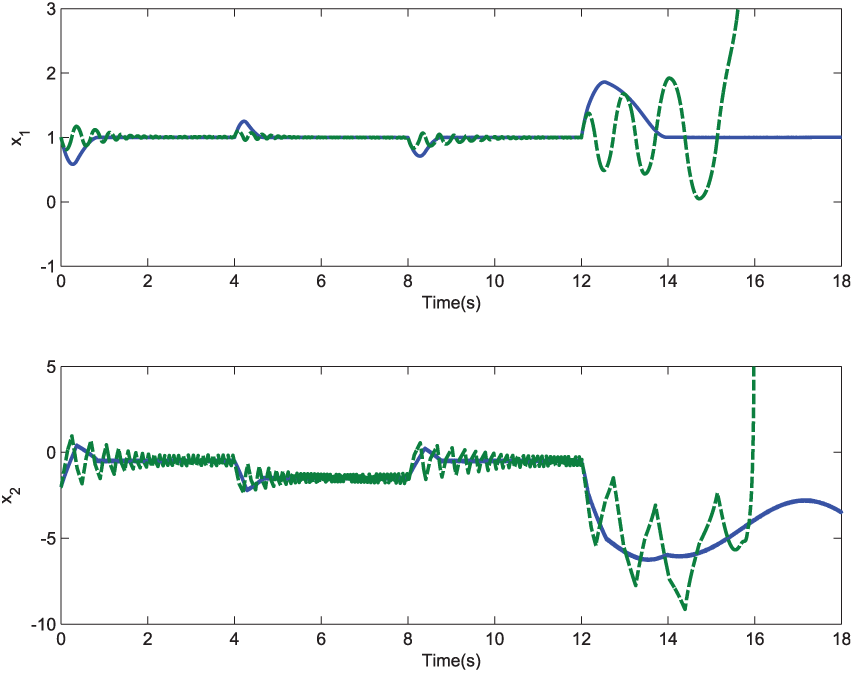
Time history of system states under the controllers given by equations (33) (solid line) and (34) (dotted line) with initial states
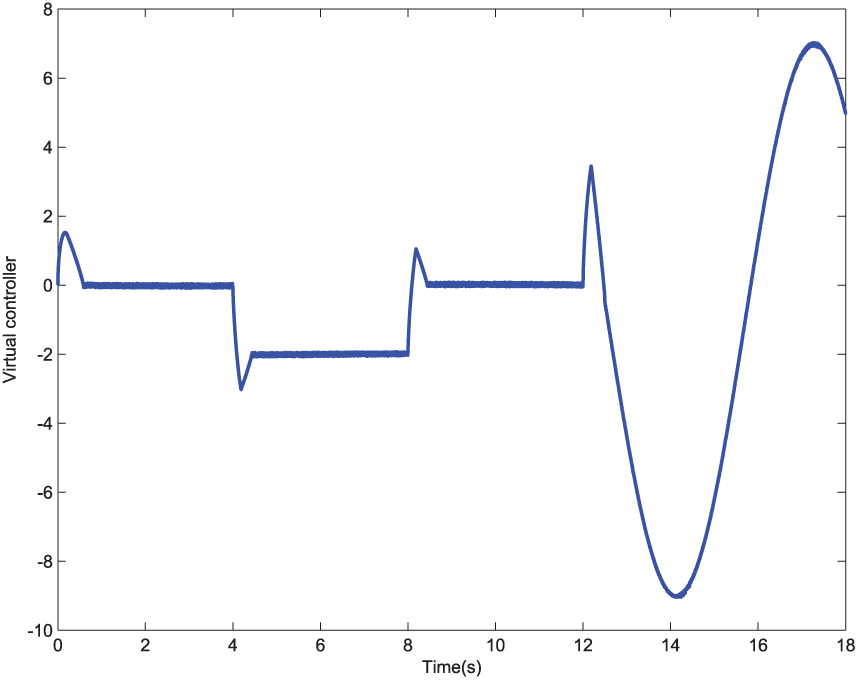
Time history of the virtual controller given by equation (16) with initial states
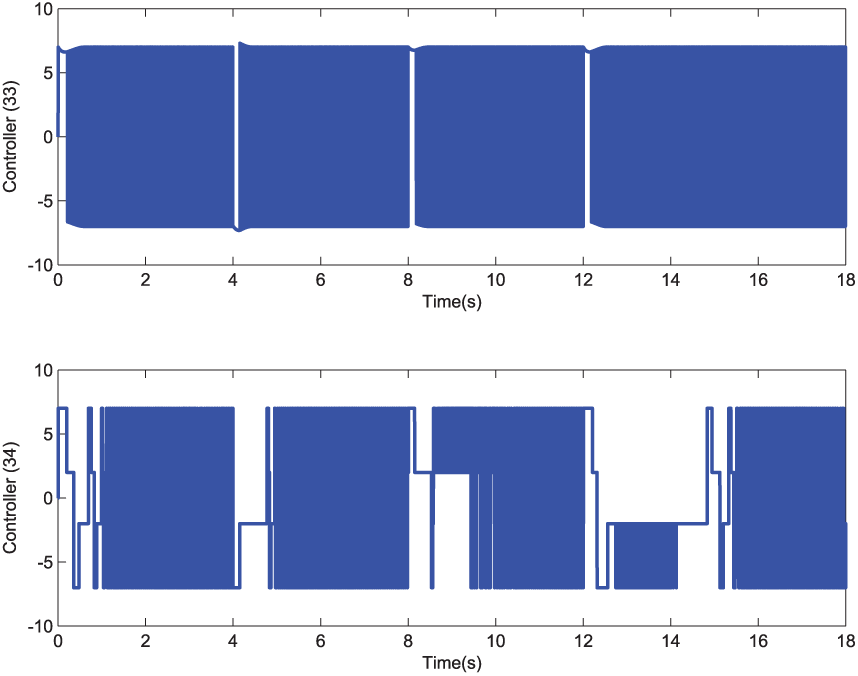
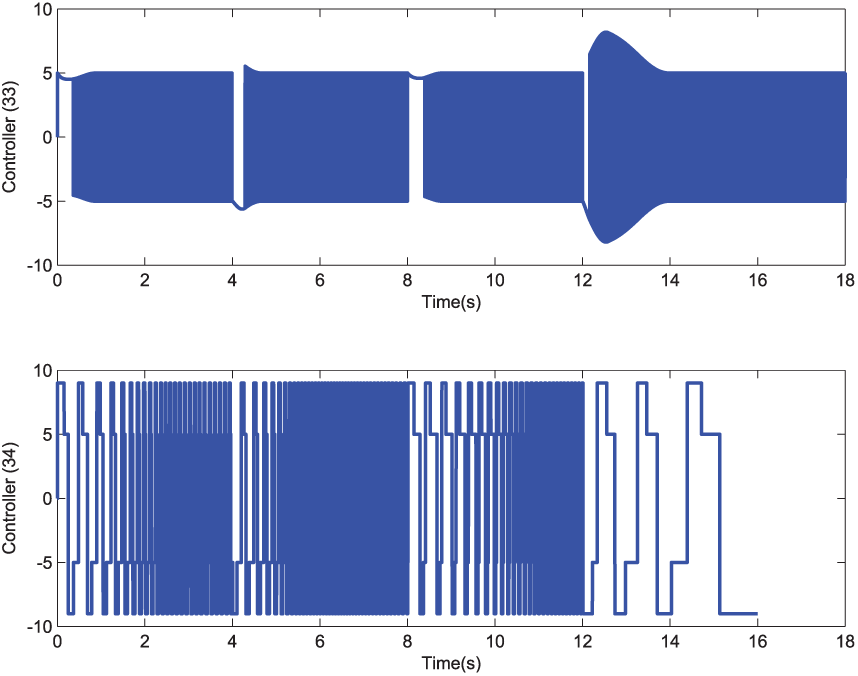
Time history of the controllers given by equations (33) and (34) with initial states
Figure 3 shows the response curves of the sliding variables and Figure 4 gives the response curves of the state variables. Figure 5 shows the response curve of the virtual controller given by equation (16), while Figure 6 shows the time history of the controllers. It is seen from Figure 3 that both controllers possess some robustness properties while the proposed controller given by equation (33) obtains better tracking performance than the twisting controller given by equation (34) in the presence of nonvanishing mismatched disturbance. Figure 3 also shows that the controller (33) provides a faster convergence rate and a smaller overshoot when compared with the twisting controller (34). These properties in Figure 3 can also be reflected in Figure 4.
On the other hand, the twisting algorithm is designed based on the assumption that the uncertainties should be bounded by some positive constants, which is usually a local condition. This implies that the twisting control method can only obtain a local result. In other words, if the initial states are very large, the system states may diverge to infinity. However, this issue will not happen in the proposed controller (33), since it is a global controller. Let the initial values be
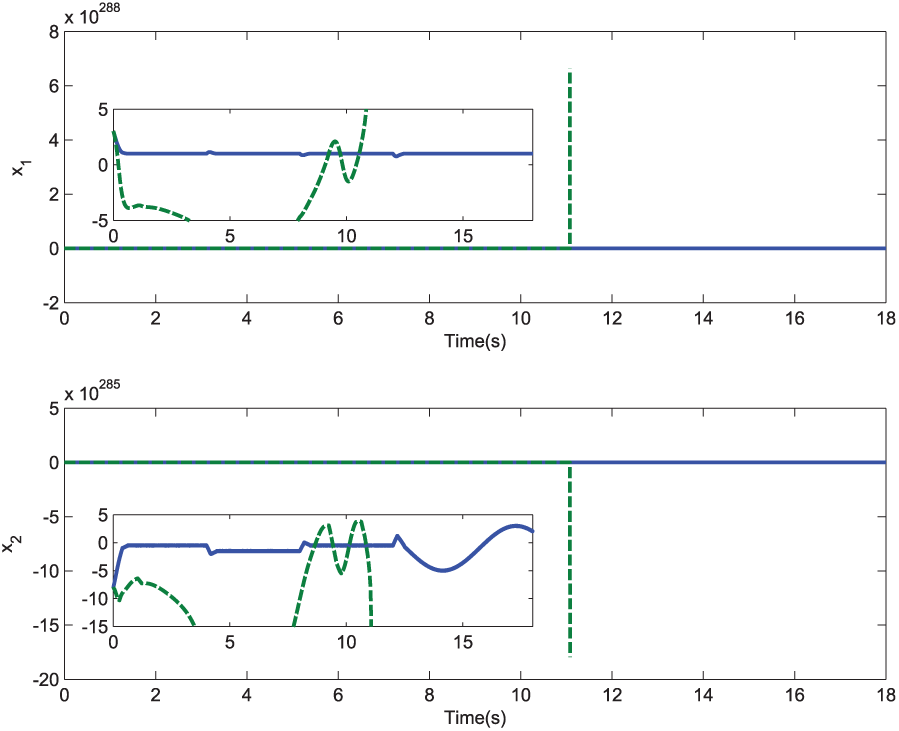
Time history of system states under the controllers given by equations (33) (solid line) and (34) (dotted line) with initial states
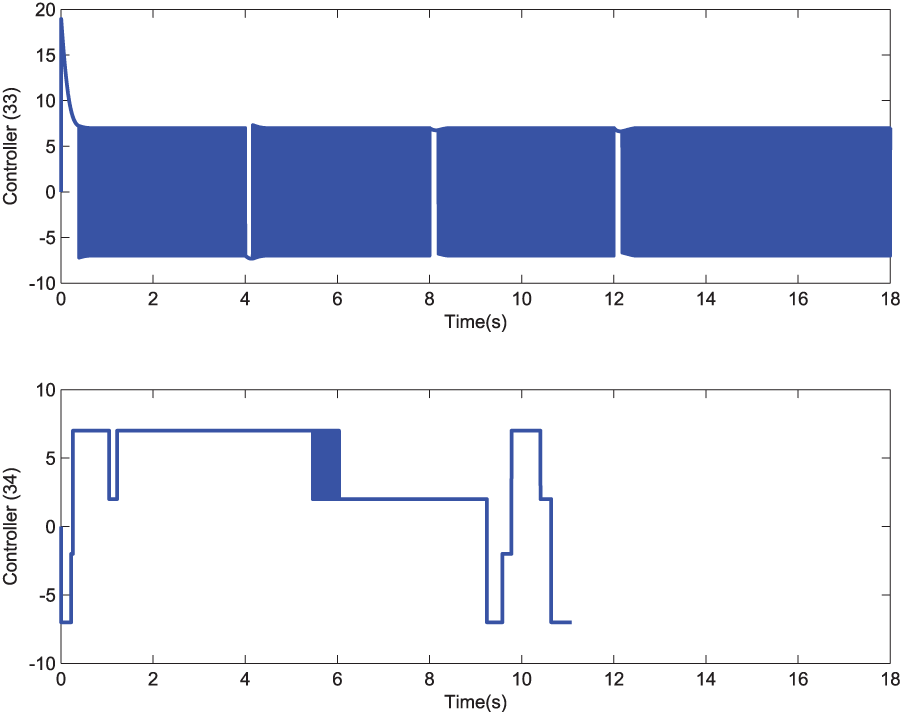
Time history of the controllers given by equations (33) and (34) with initial states
Simulation with an unbounded disturbance
It can be clearly observed that the above chosen disturbance

as shown in Figure 9. With the unbounded disturbance, the initial states of the system (31) are still chosen as
Time history of the unbounded disturbance
Time history of the sliding variable under the controllers given by equations (33) (solid line) and (34) (dotted line) in the presence of an unbounded disturbance
Time history of system states under the controllers given by equations (33) (solid line) and (34) (dotted line) in the presence of an unbounded disturbance
Time history of the controllers given by equations (33) and controller (34) in the presence of an unbounded disturbance
Conclusion
A control problem of sliding mode dynamics with nonvanishing mismatched disturbance has been addressed in this paper. Based on the Lyapunov-based technique, a backstepping-like discontinuous SOSM controller has been developed, which can be used to handle nonvanishing mismatched disturbance. Meanwhile, the finite-time Lyapunov analysis, instead of finite-time convergence, has been given for the closed-loop system. As a byproduct, the frequently-used constant-upper-bound hypotheses of conventional SOSM dynamics has been relaxed to the state-dependent hypotheses in this paper. The extension of the proposed SOSM control method to a higher-order case can be considered as our future research.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation of China (grant numbers 61573170 and 31571571), the Priority Academic Program Development of Jiangsu Higher Education Institutions, the Jiangsu Natural Science Foundation for Distinguished Young Scholars (grant number SBK2018010063), the Six Talent Peaks Project in Jiangsu Province(grant number XNYQC-006) and the Graduate Scientific Research innovation Program of Jiangsu Province (grant number KYCX17_1781).