
Abstract
The mission route plays an essential role for the mission security and reliability of an unmanned system. This paper gives a route planning method for autonomous underwater vehicles (AUVs) based on the hybrid of particle swarm optimization (PSO) algorithm and radial basis function (RBF). In the improved PSO algorithm, metropolis criterion is used to prevent the improved PSO algorithm from falling into local optimum and RBF is used to smooth the path planned by PSO algorithm. Compared with classic PSO algorithm, the hybrid algorithm of PSO and RBF can avoid falling into the local optimum effectively and plan an anti-collision route. Moreover, based on the simulation results, it can be seen that the approach presented here is more efficient in convergence performance, and the planned route requires lower performance of AUVs.
Keywords
Introduction
With the increasing demand for marine research and development, autonomous underwater vehicles (AUVs), as a new underwater transport platform with the capability of autonomous planning and navigation, have become an important unmanned carrier for the exploration and exploitation of marine resources (Blidberg, 2001). Owing to the complexity and variety of the marine environment, the abilities of route planning and obstacle avoidance are the foundation of autonomous navigation and operation of AUVs. Therefore, research on AUVs’ route planning method helps to raise the autonomy of AUVs and improve the efficiency of marine exploration (Das et al., 2015; Sahu and Subudhi, 2016).
Since the 1970s, the research of the AUVs route planning methods have been paid more attention by researchers, and a variety of AUVs route planning methods have been proposed. At present, the AUVs route planning methods are generally divided into two categories: the graph search method and the route search method.
When the AUVs are in a known environment without unknown obstacles, the route can be planned with the geometry based on the known environmental model. The geometric AUVs route planning methods including Free Space Method, Visibility Graph, Voronoi Graph Method, Grid Method, Cell Tree Representation, and so forth. For these methods, the mission space needs to be known, and the planned routes are based on the static environment model without considering the changes (Mahmoudzadeh et al., 2016; Petres et al., 2007).
As a result of the complex marine environment, such as incomplete seabed topographic map in AUVs working space, and the influence of marine biological swimming on the route and other conditions, the route search algorithms are usually adopted to plan the route for AUVs. At first, a rough global route is planned, and then gradually corrected the route during the movement. Such route planning algorithms are represented by heuristic search algorithms and artificial intelligence search algorithms. The common heuristic search algorithms include artificial potential field, A* algorithm and D* algorithm (Carrol et al., 2002; Cui et al., 2016). These heuristic search algorithms can find a feasible and optimal route without any collision with the environment model and have a simple and intuitive calculation process.
However, when the environment is complex and enormous, the calculation process is more complex and less efficient, and the search procedure can easily result in failure. Artificial intelligence (AI) algorithms include genetic algorithm, ant colony algorithm, simulated annealing algorithm, neural network algorithm, particle swarm optimization (PSO) algorithm, and so forth. But these artificial intelligence algorithms are prone to falling into the local optimal problem (Ding et al., 2005; Li et al., 2013; Liu et al., 2012; Zhang, 2006). Comparing these AI algorithms, PSO algorithm is simpler in computation and faster in convergence rate, which makes route planning more efficient. So, the PSO algorithm is always used as the basic algorithm for AUVs’ route planning (Clerc and Kennedy, 2002).
Because of the characteristics of the PSO optimization algorithm, the planned routes are mostly composed of discrete points. If these discrete points are not effectively smoothed, the route tracking control will be extremely difficult. Therefore, the planned route needs to be smoothed and the discrete control points need to be connected with continuous curves. At present, the most used curve fitting method is the B-Splines interpolation algorithm, but the B-spline interpolation can only be forward-smoothed, and only considers the influence of several points around the smooth point (Foo et al., 2009). Because the smooth is forward, which means the process is from the start point to the end, the smoothness for the route is not excellent. There are the same forward-smoothed problems in particle filter, Kalman filter, and so forth (Gadsden et al., 2009). In order to solve this problem, we introduce radial basis function (RBF) to interpolate the function. The RBF can approximate any continuous function with incredible precision (Er et al., 2002). Therefore, the smoothing effect is better than the B-splines. And RBF turns discrete solutions into continuous ones while preserving the original planning effect, eliminating random errors of discrete solutions, reducing the physical performance requirements, and forming the route of AUVs.
Aiming at the problem of route planning for AUVs, we propose the fusion algorithm of RBF and PSO to realize the route planning in the complicated marine environment, and plan the route for AUVs under the combination of mission constraints, unexpected threats and ocean current influence. In this paper, the second section expounds the mission environment model for AUVs, and designs the constraints model and the fitness function. Furthermore, Section III displays the fusion algorithm based on the basic PSO algorithm, metropolis criterion and RBF algorithm. In the fourth section, the simulation and analysis of the designed algorithm is carried out, and the correctness, feasibility and environmental adaptability of the algorithm are verified by simulation.
Mathematical description of the problem
Basic assumptions
Center of Mass (Centroid), Geometric Center, and Buoyancy Center are at the same point;
In the route planning process, only the movements of centroid in the horizontal orientation (yaw) and vertical orientation (pitch) are considered, the rest of the attitude movement is neglected (
In the route planning process of AUVs, set the movement for uniform movement, and the speed is
Figure 1 shows the AUV motion diagram, where
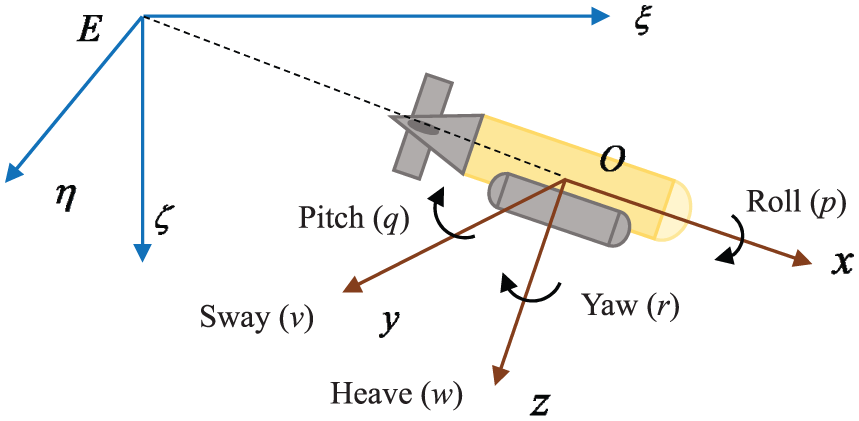
The AUV motion diagram.
The fixed coordinate system: the original point is optional for the earth,
The moving coordinated system: the gravity center of the AUV is generally selected as the origin O; axes ox, oy, oz respectively are the intersection of the horizontal, transverse and longitudinal sections through the O point of the AUV, and the heading of the ox pointing to the heading of AUV is positive, and others are according to the right hand rules.
Environment (constraint) modeling
Constraint modeling in the marine environment is to describe the mission environment using a functional simulation method prior to route planning. Because of the complicated marine environment, AUVs need to consider a variety of natural environment constraints (currents, storms, seafloor topography and moving fish) and mission environment constraints (such as ships, mines and other threats). In view of the above environmental constraints, the complex marine environment is expressed as the following categories of constrained regions, which are simulated respectively by using function models (Li, 2014; Qian, 2009).
(1) Restricted regions
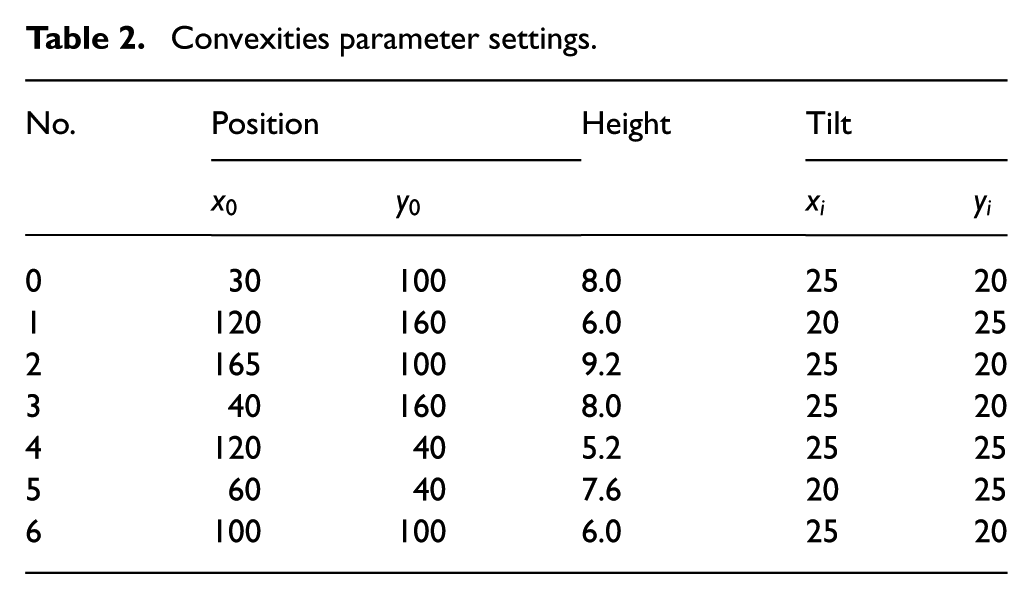
Restricted regions means a physical space where the AUVs cannot enter or pass through, such as islands, reefs, no-navigate region and underwater mountains. As shown in Figure 2, the restricted regions are represented by the convexities of the envelope according to equation (1), and the parameters are shown in Table 2. When the AUV is planning a route, the route cannot enter these bumps, so the route needs to pass around the restricted regions or pass through the bugle.
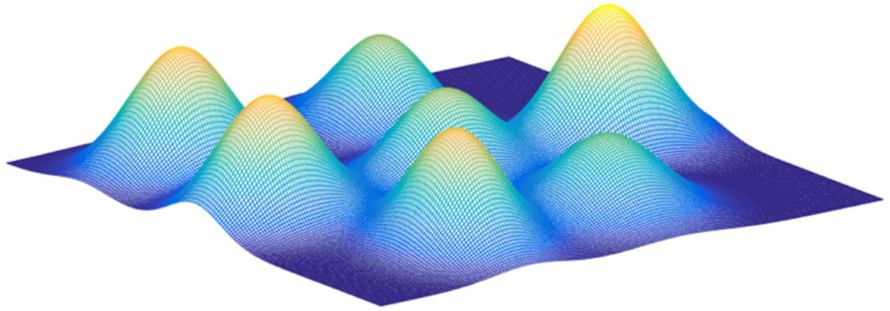
Digital map simulated by mathematical functions.
In this paper, the restricted regions are enveloped into mountain ridge, and a mathematical model is used to describe the digital terrain

Where
(2) Ocean current region
In the route planning of AUV, the existence of ocean current will have an impact on the direction and speed of AUV’s navigation, making the difference between its actual route and planned route, thus affecting the navigation of AUV. Therefore, it is necessary to take full consideration of the influence of the ocean current in the AUV route planning method. As shown in Figure 3, the horizontal flow of the currents is merely considered, without considering the vertical flow of current (Mao, 2006).
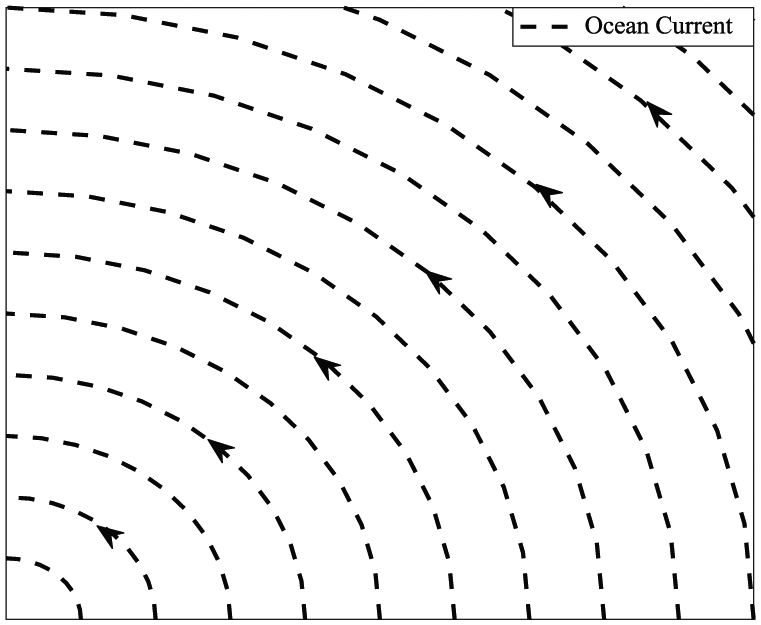
Horizontal ocean current model (the speed is
In this paper, the discrete function is used to represent the ocean current, and the working space of AUV is set as a two-dimensional discrete space in the Descartes coordinate system. In the plane space, any point Q can be defined as

Therefore, the velocities at
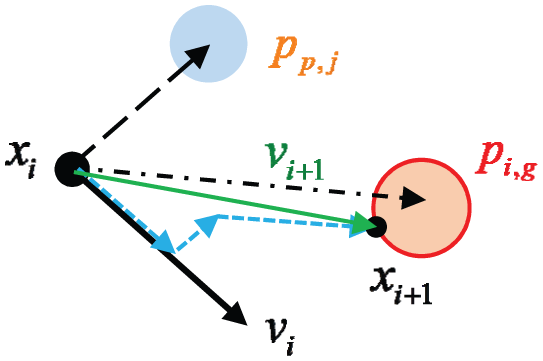
When the AUV passes through the ocean current area, the heading of the vehicle needs to adjust to complete the route assignment in the direction of the composite with the ocean current. When the AUV passes through the current area, the velocity is shown in Figure 4. AUV has uniform motion, with a velocity of
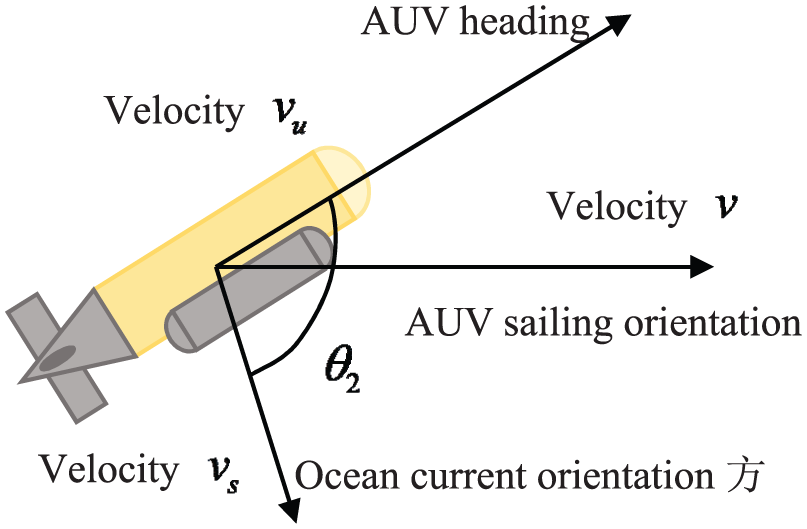
Schematic diagram of the velocity of AUV.
(3) Threat regions
In complex ocean environments, a large number of enemy forces (such as warships, submarines, etc.) deployed in the ocean often pose a threat to the safe navigation of AUV. Therefore, it is necessary to model the threat regions prior to the route planning, and to avoid the threats during the planning process. Some threats are shown in Figure 5. There are three main types of danger that may exist in the working ocean area of AUV according its working depth. The first type of threat comes from ships floating on the sea surface, such as ships with sonar, floating sonar, and so forth. The second type of threat is in the water, such as submarines, moving fishes, and so forth. The last type of threat is natural threats existing on the seabed. Therefore, there are three main threat models:
Lower half ellipsoid model

Ellipsoid model

Upper half ellipsoid model

Where,
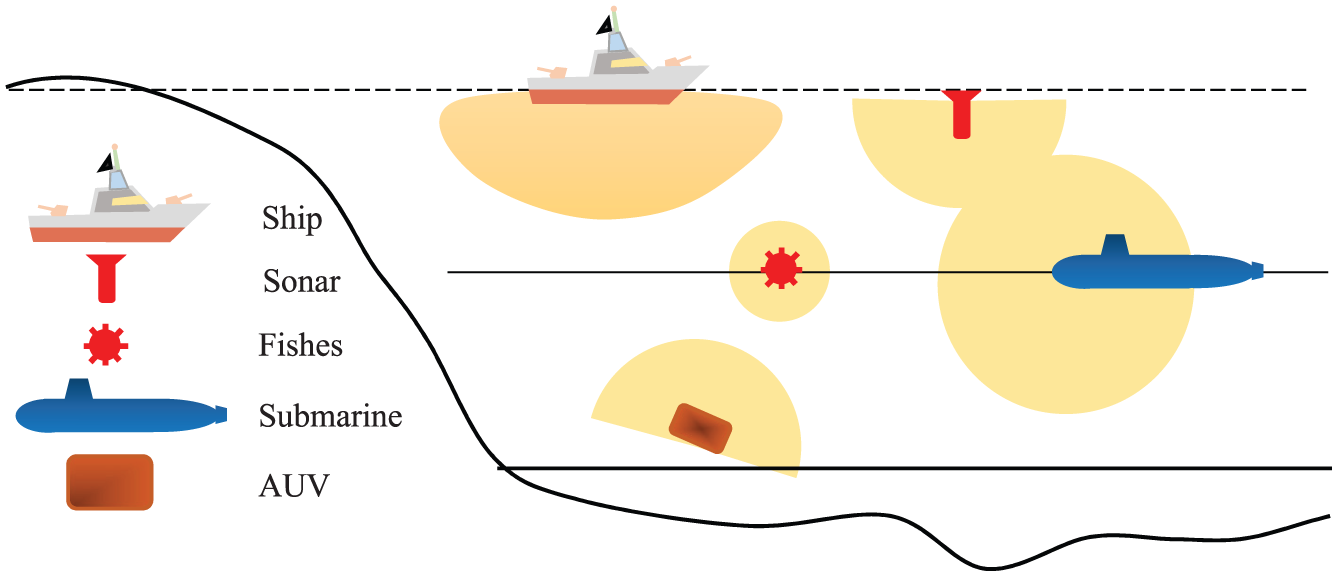
The threat model in the marine environment.
Other constraints
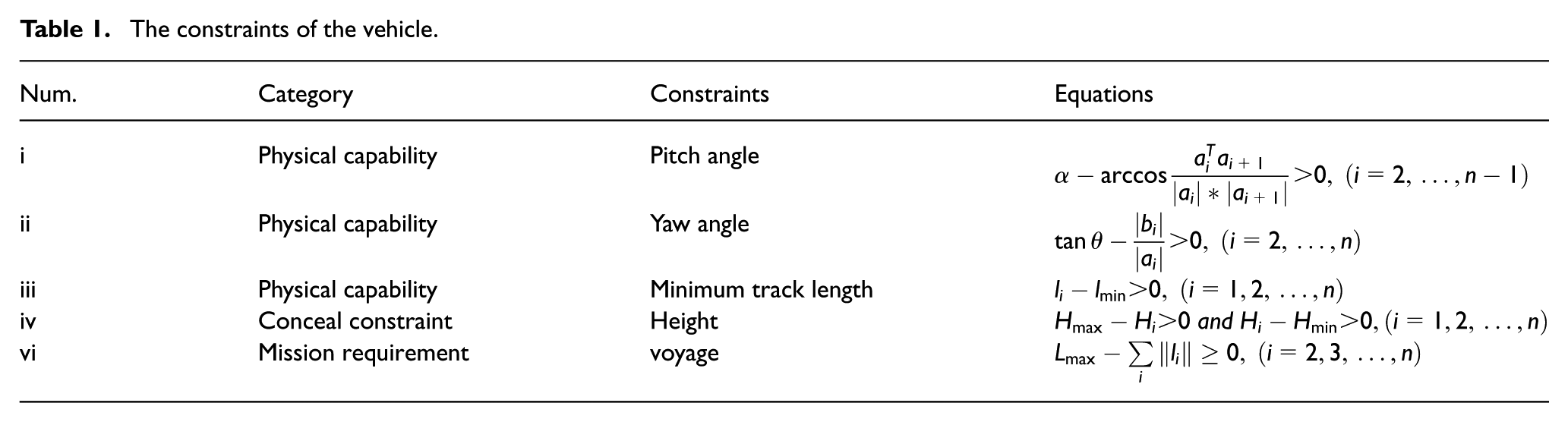
In the process of AUV route planning, except considering the environment, threats, terrain and other factors, it is necessary to consider the physical performance, the safety of navigation, concealment and so on. Therefore, the planned route needs to satisfy many factors as shown in Table 1.
The constraints of the vehicle.
Convexities parameter settings.
where
Fitness function
The aim of route planning is to find a optimal route from the starting point to the destination with shortest navigation time and maximum survival probability. It takes a lot of factors into consideration, such as real time, comprehensive effects of threats, topographies, AUV’s performance, mission requirements for example. Therefore, the fitness function must consider the sailing time, route safety, and so forth.
Therefore, the fitness function f is designed as

Where n denotes the number of nodes in the planned route,
PSO algorithm and RBF
PSO has the advantages of less parameter setting, simple structure and inherent parallelism. Therefore, it is especially suitable to solve complex optimization problems with a lot of nonlinear, non-differentiable and multi-peaks. However, the PSO easily falls into the local optimal solution and the solutions are generally discrete (Rajabi et al., 2014).
In this paper, aiming to solve the problems of PSO algorithm during the route optimization, the PSO algorithm is improved to adapt to complex marine environment and emergencies. The proposed route planning method which is based on PSO algorithm, Metropolis criterion and RBF is shown in Figure 6, which divides the improved PSO (IPSO) algorithm into GPSO (Global PSO algorithm) and LPSO (Local PSO algorithm) according to the route optimization scope. These two PSO algorithm processes are the same and the difference is granularity while dealing with the problem. In this paper, the Metropolis criterion is proposed as the new acceptance criterion of PSO to improve the PSO problem of easily falling into the local optimal problem. Then we use the RBF to interpolate the planned route and reduce the physical performance requirements to AUV. The same for the complex and volatile marine environment characteristics, a local PSO algorithm is designed. In the event of a sudden threat, the route planning algorithm turns into the LPSO processing flow, the re-planning route without entering the threat region will be planned.
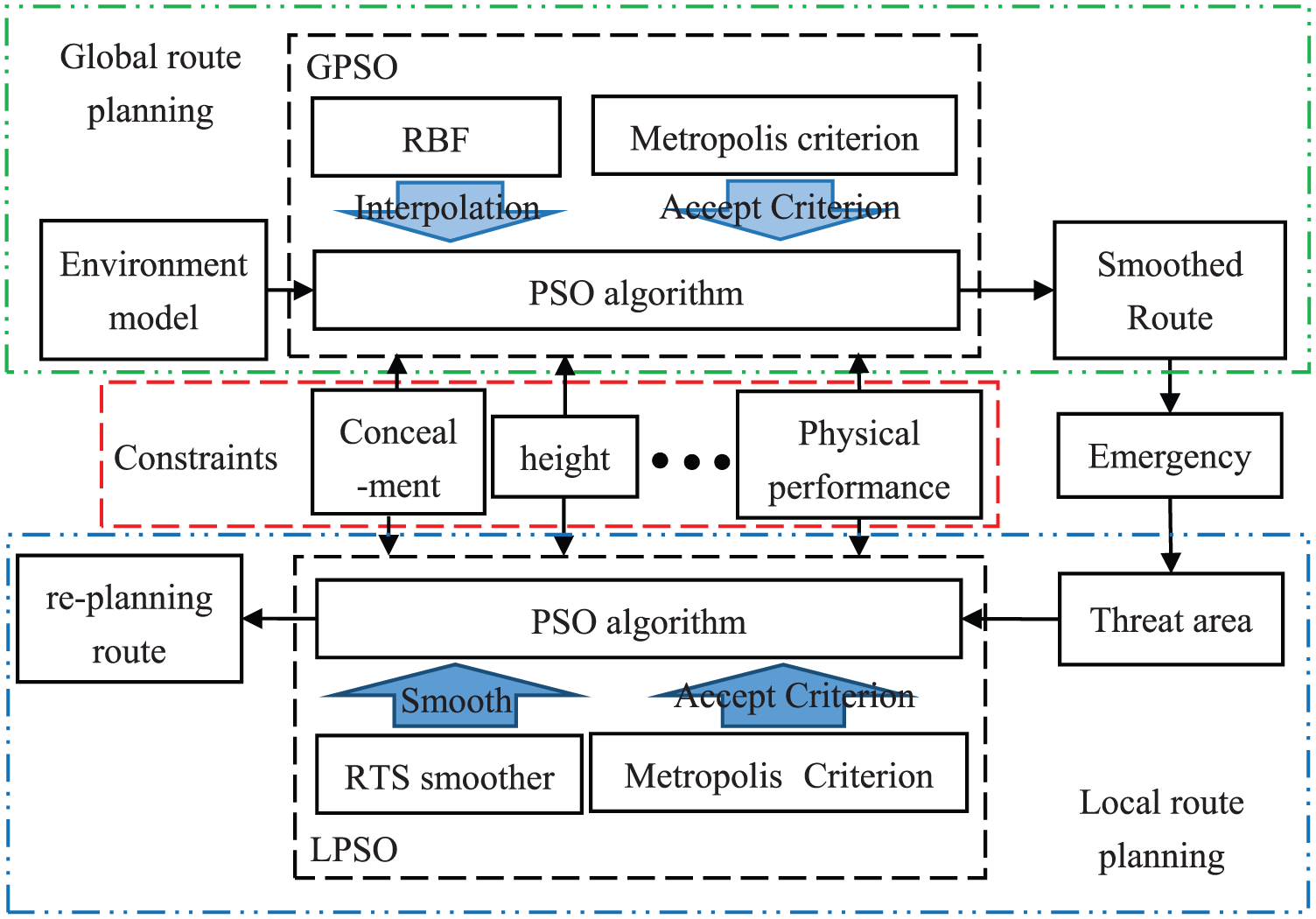
Route planning algorithms diagram.
Particle swarm optimization algorithm
The PSO algorithm can be described as: there are m particles in the D dimension space to search, and the velocity and position of


Where
Figure 7 shows the particle’s position update process according to the updated equations (7)–(8).
Particle position update in PSO algorithm.
There are three parts on the right side of equation (7) according to Figure 7. The first part is the velocity part
Because of the inherent characteristics of PSO algorithm, such as easily falling into local optimum, and incomplete of the local search, scholars proposed various improvements, mainly to adjust the inertia weight and learning factor so that the algorithm can balance between global search and local search.
The inertia weight, which determines the particle’s convergence rate, is represented by w. When w decreases with the increase of the iterations number, the changing w is conducive to improving the performance of the algorithm, and the equation is as follows (Vafashoar and Meybodi et al., 2016)

Where
The improvements of learning factors are introduced in the same way, and the equations are as follows


Where,
The improved strategy of the PSO algorithm in this paper can effectively improve the situation of local convergence, and it has significantly improved in the optimization accuracy and stability.
Metropolis criterion
Metropolis criterion is a strategy for receiving new states. And the process is described in a thermos physical method. The physical system tends to be in a lower energy state, but the heat movement prevents it from falling into the lowest state. Therefore, we need to focus on those important contributions to achieve better results.
First, initializing particle state as the particle’s current state, and the energy is

where
Compared with the state i, if the new state j is more important, the new state will be the real-time state instead of state i, otherwise, maintain the original state.
The above new accept criterion is called metropolis criterion, which can significantly improve the artificial intelligence algorithm to fall easily into the local optimum.
RBF
RBF can approximate any non-linear function and can handle difficult-to-interpret regularities in the system. And it has good generalization ability and fast learning convergence speed. Therefore, it has been successfully applied in nonlinear function approximation, time series analysis, data classification, pattern recognition, information processing, image processing, system modeling, control, fault, and so forth (Deng et al., 2013; Su et al., 2013).
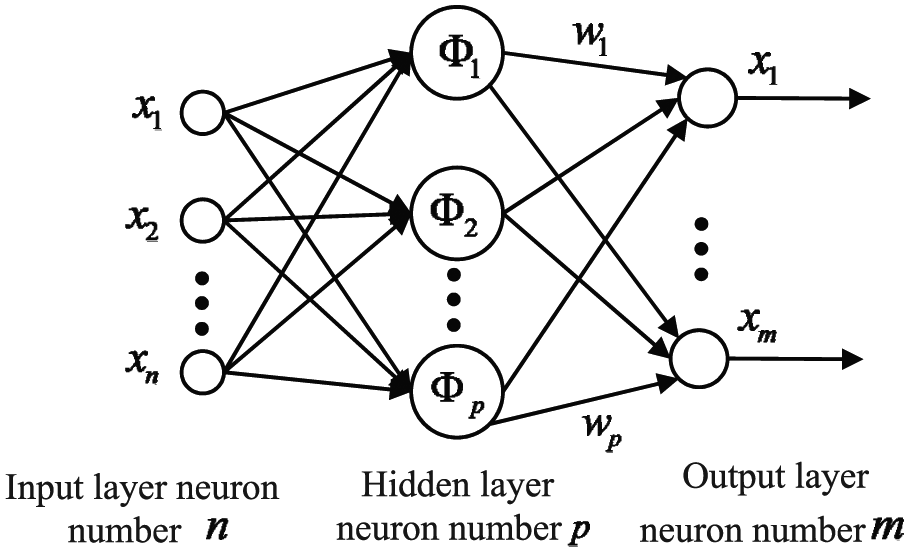
The structure of an RBF neural network consists of three layers, as shown in Figure 8:
The input neuron layer;
The hidden neuron layer;
The output neuron layer.
RBF neural network structure.
During the learning process, RBF neurons firstly calculate the distances between input nodes and center nodes and then non-linear transformations will be applied to this distance. Output layer and hidden layer perform different learning tasks. Output layer is to adjust the linear weights, using a linear optimization strategy, and thus learn faster. The hidden layer is to adjust the parameters of the transfer function, using a non-linear optimization strategy, which has a slow learning speed.
The Guass function is used as the transfer function of the RBF

where x denotes the input vector;
RBF uses Guass function as the transfer function of hidden layer, and the hidden layer is used to achieve the non-linear mapping of

Where
To illustrate the advantages of RBF, several filter algorithms, such as Kalman filter, B-Spline interpolation and RBF interpolation are compared. It can be seen clearly that the RBF has the best performance in interpolation fitting both linear and non-linear functions in Figure 9. And the Kalman filter has a better performance than B-Spline interpolation in linear function, while the B-Spline performs better in the non-linear function.
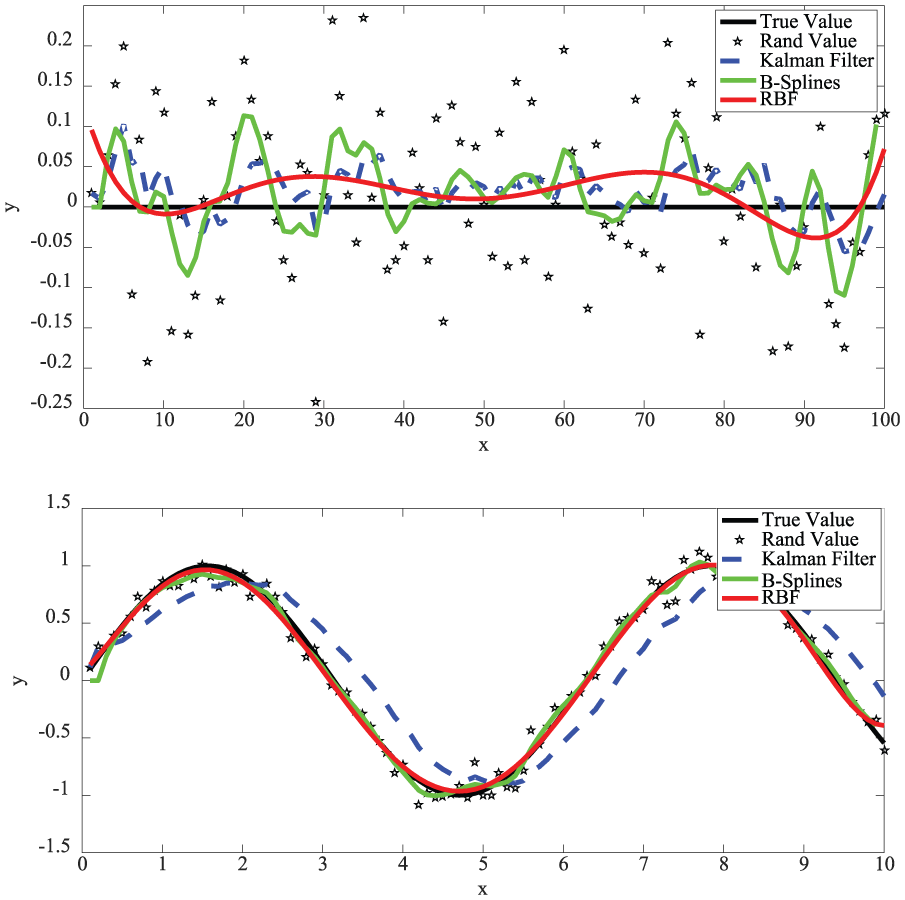
Compare among RBF, Kalman filter and B Splines on smoothness.
Route planning algorithm based on improved PSO
Global route planning algorithm
Although the PSO algorithm has many advantages, such as easy to understand, fast convergence and less parameter settings, there are still some problems such as easy to fall into the local optimum, the planned route is not smooth, and so forth. We proposed a fusion algorithm based on PSO algorithm, metropolis criterion and RBF. The metropolis criterion is used as new acceptance criterion to improve the problem of easily falling into local optimum. RBF is used to interpolate the planned route, which can not only change the discrete points into a continuous route, but also eliminate the random errors caused by the discreteness.
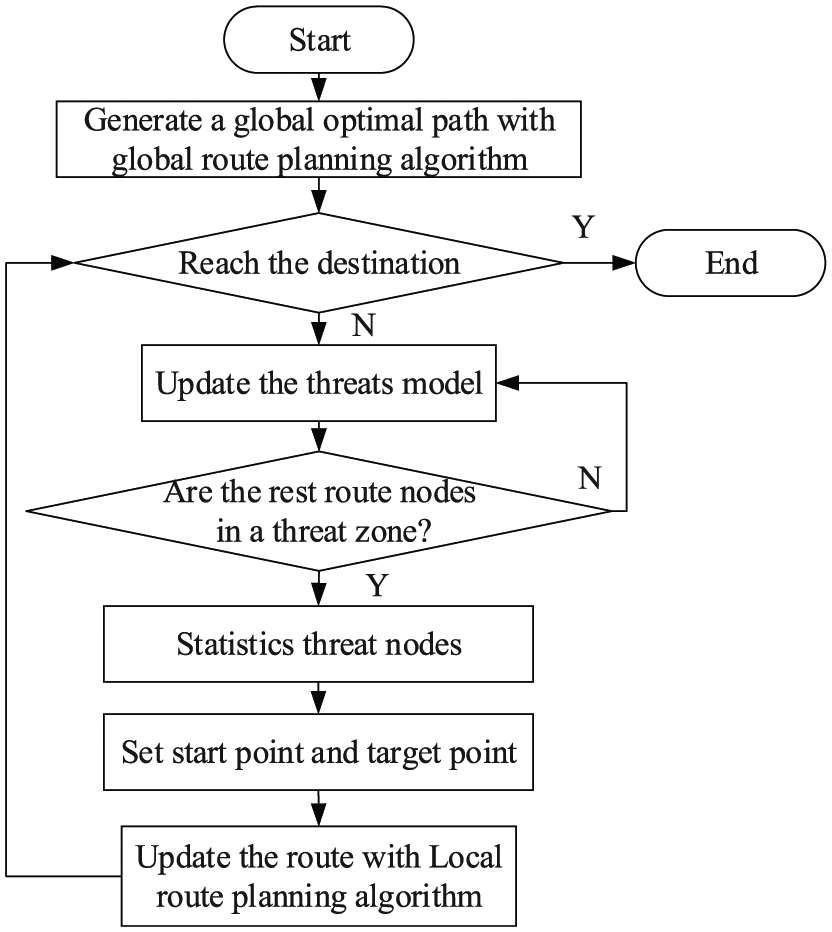
Based on the contents introduced above, we apply the fusion algorithm based on the PSO algorithm and RBF to AUVs’ route planning, and the algorithm has been summed up by the flow chart shown in Figure 10. Also, the proposed distributed algorithm for AUV is implemented in the following specific steps:
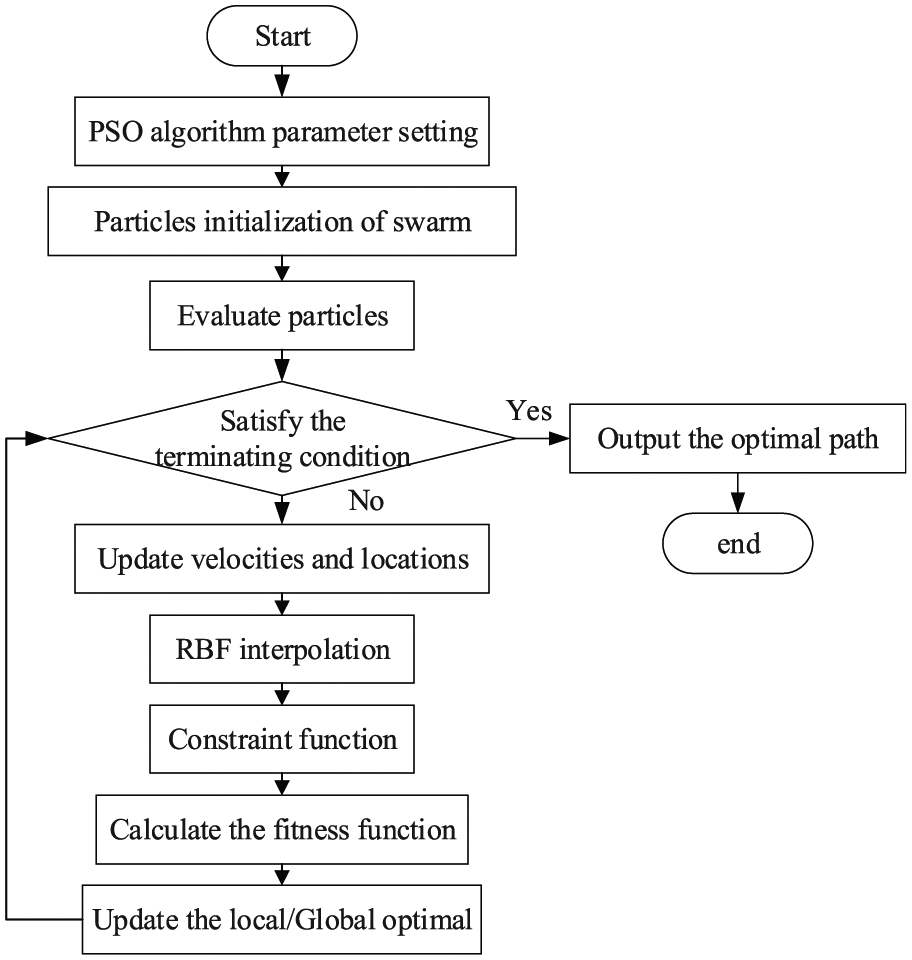
Flow chart of global route planning algorithm based on the fusion algorithm.
Local route planning algorithm
Compared with the global route planning algorithm, the coordination of optimization of the route and route planning time is the key to the online local route planning. Based on improved PSO algorithm, the global route planning algorithm provides a global optimization reference route for online planning. In actual route planning, with the guidance of the global route, AUV can avoid various obstacles that threat the safety of the route as early as possible. However, in practice, AUVs do not strictly operate on the reference route. According to the current environment probed by the sensor and the feedback running state from the control system, the route planning system determine the front route whether there are emergent threats and obstacles. And then the probed data will be transmitted into the digital map as obstacles. Local route planning will work, re-planning a local route, completing the modification of waypoints and control instructions before the AUVs reach new threat areas. This can improve the response ability of AUV to the surrounding and changing situation and avoid new threats. As shown in Figure 11, the broken line in the picture is the predetermined route, and the solid line is the re-planning route.
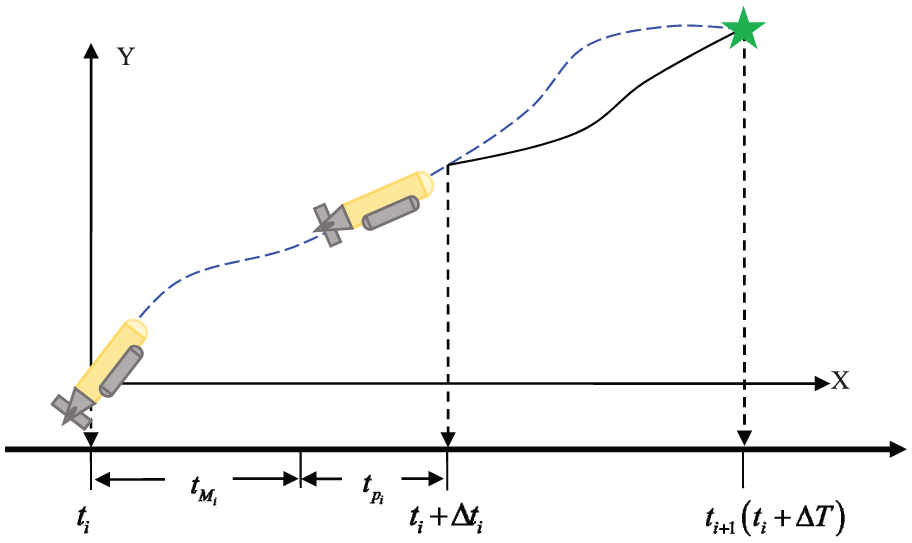
Re-planning scheme.
Where
To solve the problem, this paper designs a fast, local route planning algorithm for emergent environmental threats. Based on the global optimization route, the local route planning algorithm is to determine whether the route is safe under the emergent threat, and re-planning the threatened route segments. The re-planning method adopts the improved PSO route planning method with the RTS smoother. The specific algorithm flow chart is shown in Figure 12.
Local route planning algorithm.
Simulation
In this paper, the function simulating method of digital elevation map is used to establish the threats models. And the AUV route planning is implemented with GPSO modified by RBF and LPSO modified by RTS smoother. In order to verify the accuracy of the designed algorithm, simulation parameters are designed based on the built virtual model, as shown in Table 3 (Zhang et al., 2015).
PSO parameters settings.
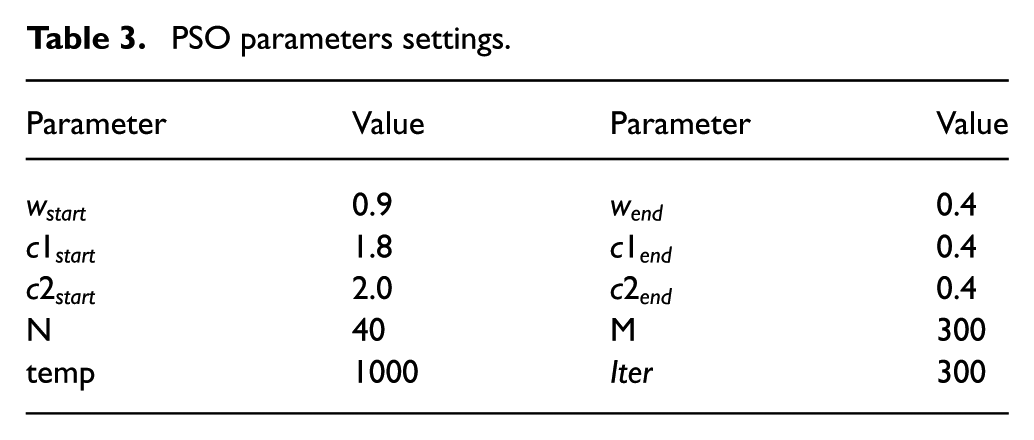
where w represents the inertia weight,
The specific parameters descriptions are shown in section 2.2. The size of the mission space is
RBF adopts MATLAB’s newrb function to design an approximate RBF. Its invocation format is

where P is a matrix composed of input vectors, T presents the matrix consisting of target classification vector, Goal represents the mean square error goal, SPREAD means the spread speed of RBF, MN means the maximum number of neurons.
In this paper, the parameters are set as [net]=newrb(P,T,0,100,10) after testing many times.
To discuss the superiority of the proposed algorithm (improved PSO with RBF interpolation, IPSO), this paper introduces three other comparing algorithms, including basic PSO algorithm, improved PSO algorithm with B-spline interpolation (BPSO), and improved PSO algorithm based on Kalman Filter (KPSO). These four algorithms are compared with each other to illustrate the superiority.
Route planning without considering the impact of ocean current
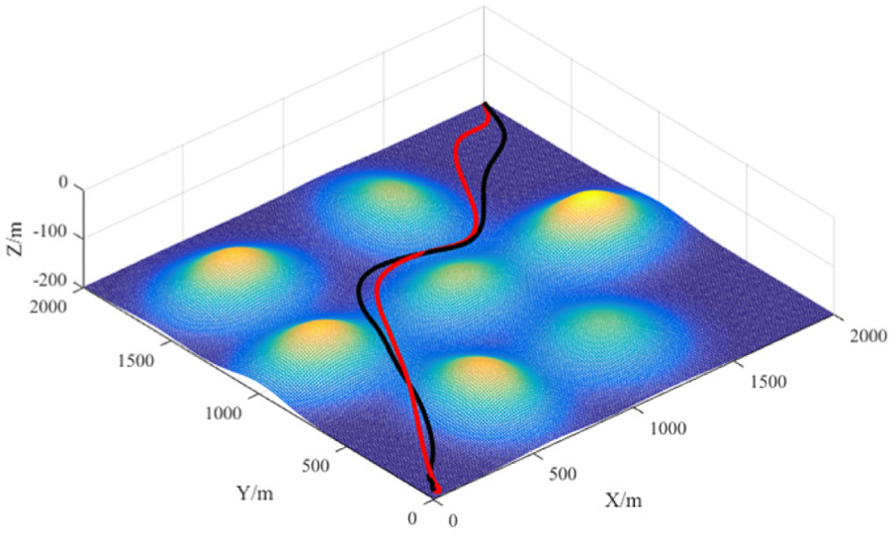
Considering the environment model constraints without the influence of ocean current, the results based on the fusion algorithm of RBF and PSO algorithm (IPSO) are shown in Figures 13–16. Figure 13 is a three-dimensional schematic diagram of the route planned by the proposed global route planning algorithm. It can be clearly seen from the figure that the proposed algorithm can plan a collision-free route under the environment model and constraint conditions. And compared with other algorithms, the smoothest route is planned by IPSO algorithm. As can be seen from Figure 14, among the 100 iterations, the route planned by IPSO is significantly better than the other three algorithms, and the final solution is also the best among these four algorithms. Figure 15 shows the three-dimensional view of the route planned by IPSO and the projection in the three planes. It is more intuitive that the route planned by IPSO is smooth in the three planes, which means the route requires a lower performance for the AUVs. Also, in Figure 16, the variations of yaw and pitch angles with turning nodes are displays to evaluate the smoothness of the planned route by several algorithms. It is obvious that the angles of the route planned by IPSO, which is improved with RBF, are smaller than others. In other words, the route planned by IPSO is the smoothest, indicating that the IPSO algorithm is the best algorithm within these several algorithms for AUVs’ route planning.
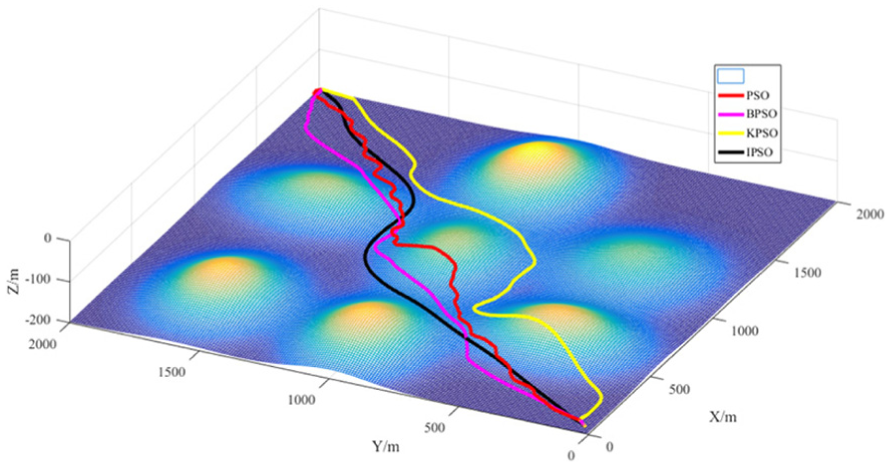
Three-dimension route planned by AUV.
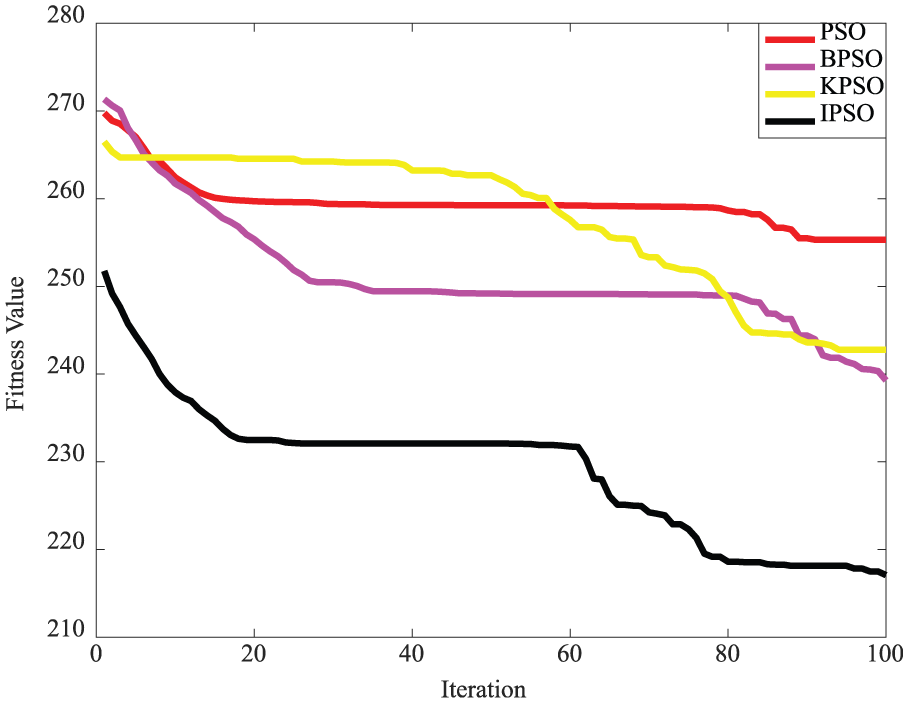
Fitness value of iterative.
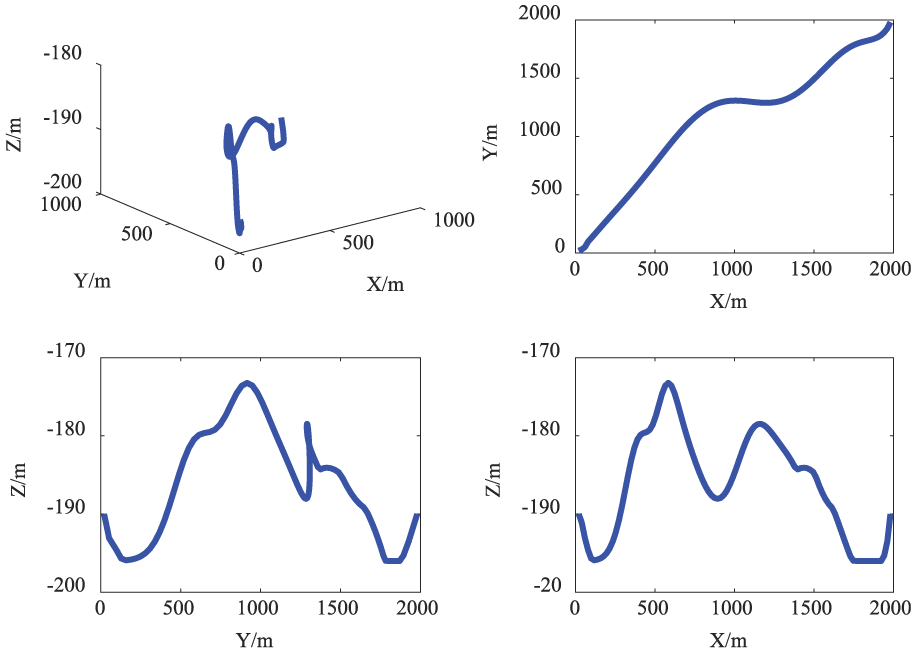
The projection of planned route.
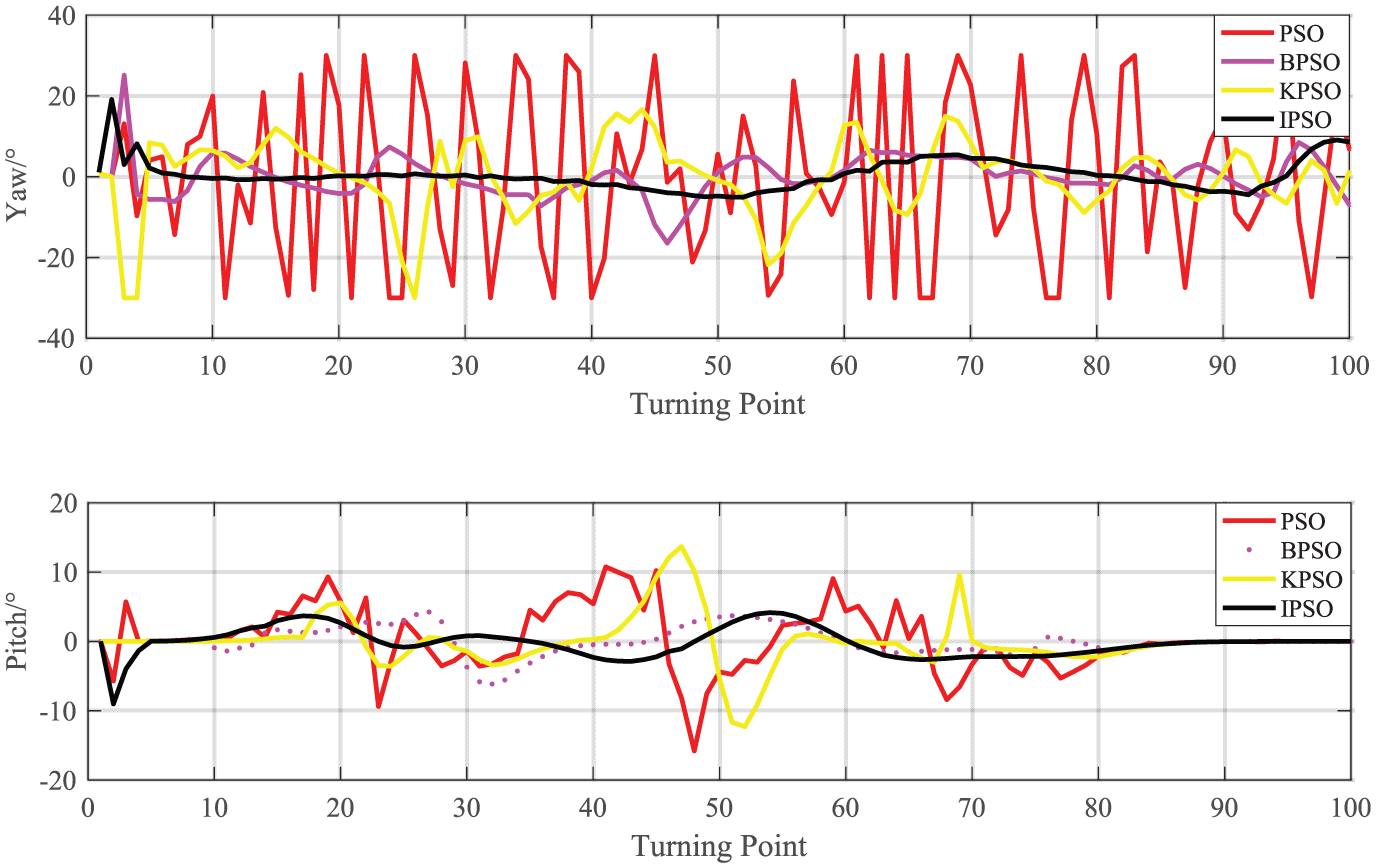
The variations of yaw and pitch angles with the nodes.
Consider the effects of currents
Under the existing environment models and constraints, the proposed algorithm can still complete the corresponding route planning mission considering the influence of ocean current. Figure 17 is a schematic plan of the proposed algorithm. The dotted curve in the figure is the result of the route planning of the AUV considering the influence of the ocean current and the solid curve is the result without considering the ocean current. It can be clearly seen that in the first half of the AUV routes are similar under the strong environmental model and constraints. But under the weak environment constraints, the route planning considering the influence of the current can make adaptive adjustments to the current, so that it can reduce the impact of ocean currents on AUV route planning. Figure 18 shows the projected contrast of the planned route in three planes in both cases, so as to better characterize its planning features. Figure 19 shows the extra energy (higher fitness value) consumed to overcome the effects of ocean currents to reach the destination.
The planned route considering current influence.
Projection comparison.
Fitness value of iterative process.
Route planning method in case of sudden threat
When encountering an emergent threat, it is necessary to re-plan the route that was in the threat area. The local route planning algorithm has been introduced in section 3.4.2. And some simulation has been done to verify the accuracy of the algorithm.
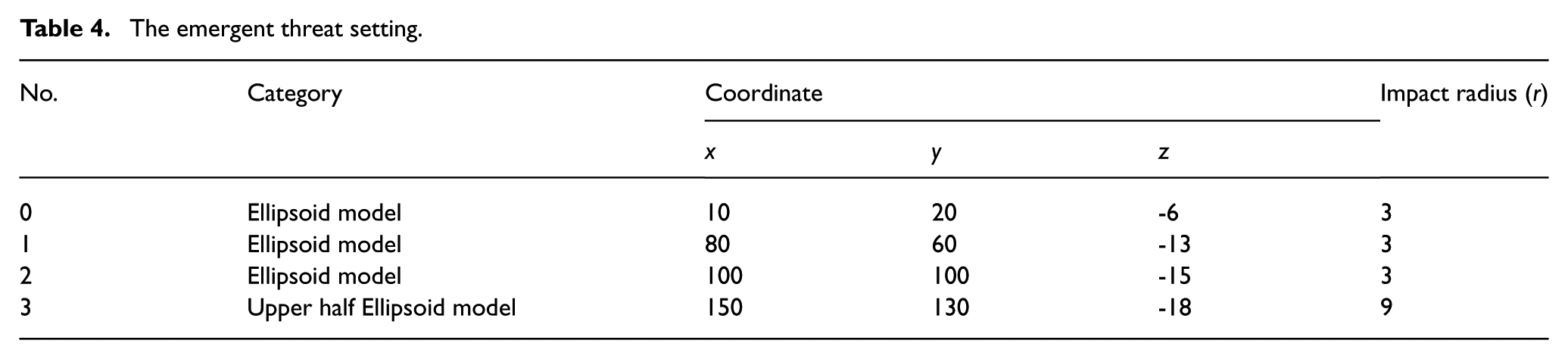
The emergent threat setting is shown in Table 4.
The emergent threat setting.
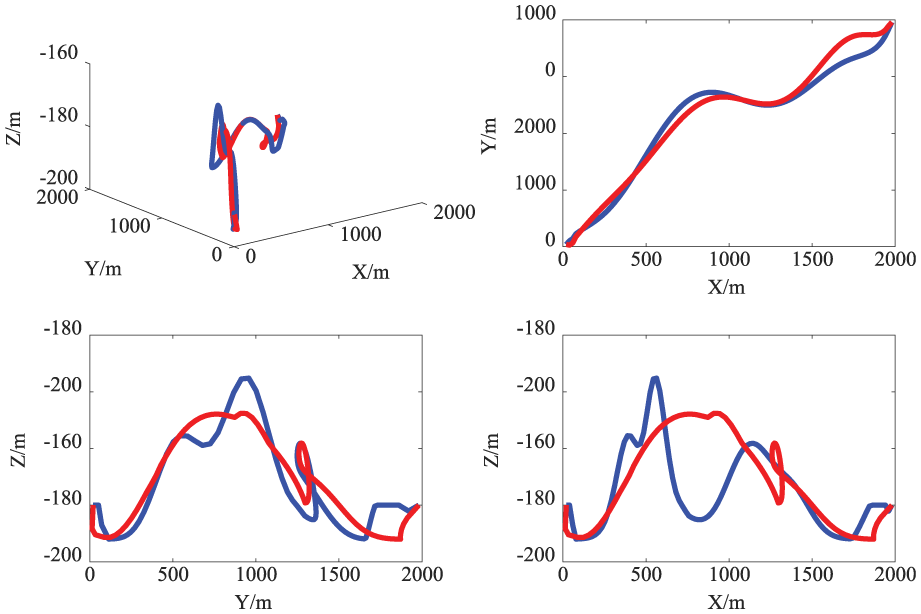
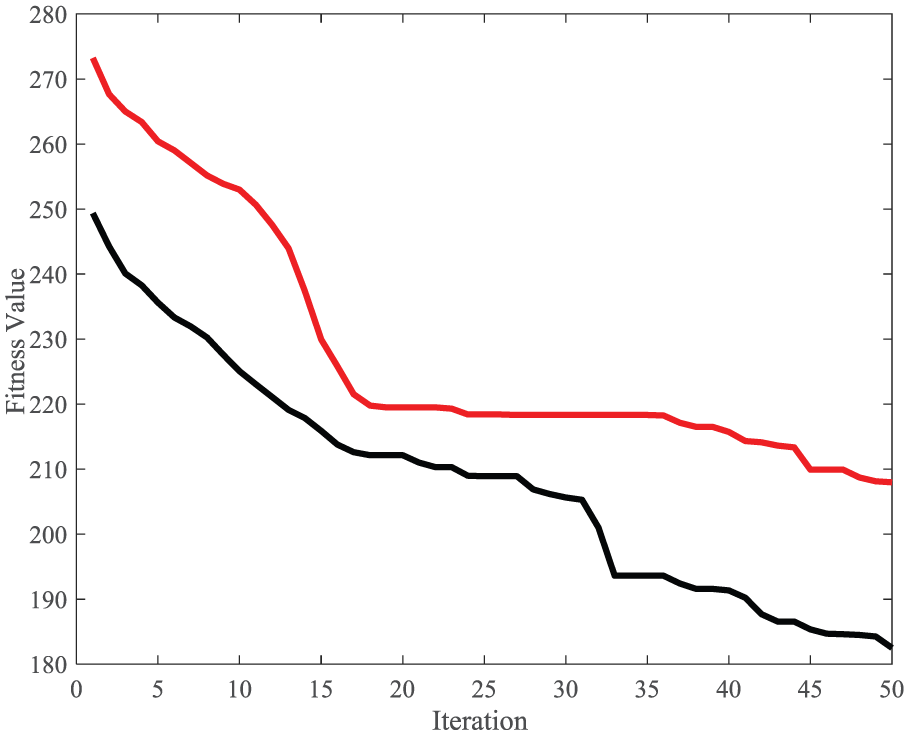
As shown in Figure 20 (three-dimension graph), the route can be planned by the proposed local route planning algorithm in emergent threats. The dotted line in the figure shows the re-planning route when the planned route (the solid lines) encountered emergent threats. It can be seen in Figure 20 that the planned route does not intersect with the emergent threat, and the entire planned route is smooth and reliable, which means that the proposed algorithm is feasible and effective. As shown in Figure 21, the planned route is smoother and still within the AUV physical performance constraints at the point of attachment, which can satisfy the physical performance requirements of the AUVs. Figure 22 shows the variation of the fitness value with the increase of iteration number in re-planning process.
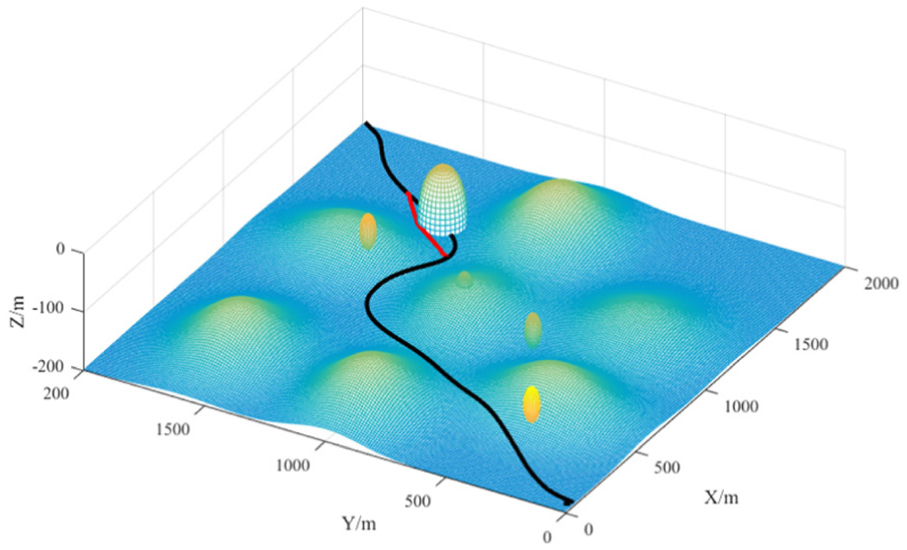
The IPSO route planning result for emergent threats.
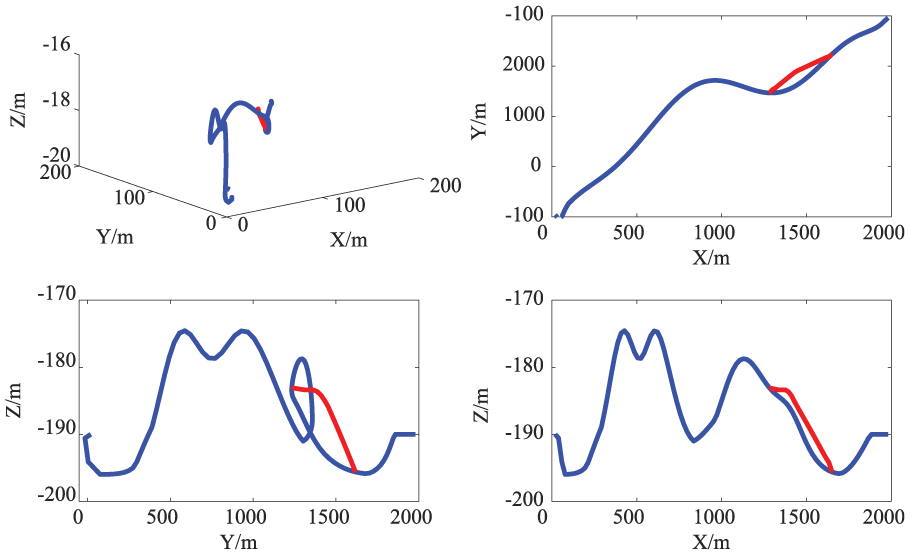
Projection of local route planning algorithm for unexpected threat.

Fitness value curve with iterations in re-planning.
Conclusions
In this paper, a modified PSO algorithm is proposed for AUVs to plan the mission route in a complex marine environment. The proposed algorithm based on the fusion of RBF and PSO algorithm can plan the path for AUVs. Compared with BPSO and KPSO, the planned route is relatively smooth, which can satisfy the requirements of tracking control for AUVs. Besides, the fusion of PSO algorithm with RBF can complete the AUVs global route planning, and the comprehensive performance of the planned route is better; the fusion of PSO algorithm with RTS smoother has higher computational efficiency and can quickly plan out near-optimal routes for AUVs to avoid emergent threats.
Footnotes
Declaration of conflicting interest
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Fundamental Research Funds for the Central Universities (No. HEUCFP201770), the Natural Science Foundation of Heilongjiang Province (No. F2017005), the National Natural Science Funds (No.11772185), the Harbin Science and Technology Innovation Talent Youth Fund (No.2015RQQXJ003), Shanghai Talent Plan Project (No. 16QB1403500).