
Abstract
Sensor fault estimation and isolation is significant for an attitude control systems model of a satellite, as it works in a complex environment. The standard unscented Kalman filter algorithm may lose its accuracy when the noise is considerable. Therefore, an adaptive filtering algorithm is proposed based on the sampled-data descriptor model. The performance of the unscented Kalman filter in sensor fault estimation is improved by the adaptive algorithm depending on innovation and the measurement residual, and its convergence is guaranteed. Combining the adaptive unscented Kalman filter with the multiple-model adaptive estimation, a sensor fault isolation method is proposed. Finally, simulation examples show that this algorithm has better estimating accuracy and isolation results.
Keywords
Introduction
Sensor fault estimation and isolation for the attitude control systems (ACSs) model of satellites is important for guaranteeing efficient work of the satellite. Recent studies on the fault estimation of ACSs models are as follows. Wang et al. (2014) proposed an orthogonal matching pursuit (OMP) algorithm for fault estimation of an ACSs model based on a sparse approximation algorithm for the flywheel faults. Gao and Duan (2014) proposed an unscented Kalman filter (UKF) algorithm for the fault estimation and fault tolerant control of an ACSs model. Wang et al. (2015) proposed a fault estimation observer for an ACSs model based on the observer redundancy. Cheng et al. (2016) proposed an incremental locally linear embedding (ILLE) algorithm for improving the fault estimation accuracy of an ACSs model with high-dimensional telemetry data. Chen et al. (2016) proposed a two-stage extended Kalman filter (TSEKF) for the actuator and sensor fault estimation of an ACSs model.
In practical studies, if one variable of the angular velocity is constant and the angular acceleration is set as zero, then the ACSs model is expressed as a descriptor system model. Descriptor systems, which are also defined as singular systems, are widely used in the expression of the actual system such as aircraft modelling (Stevens and Lewis, 1991), constrained mechanical systems (Liu et al., 2008) and electrical networks (Duan, 2010), and have received increasing attention in the past few decades.
In the domain of fault estimation for the linear descriptor systems, a robust fault estimation observer was designed in Brahim et al. (2016). For a Lipschitz non-linear descriptor model, Wang et al. (2014) proposed a novel structure robust observer for fault estimation. For linear parameter-varying (LPV) descriptor systems, Hamdi et al. (2012) designed a polytopic unknown inputs proportional integral observer (UIPIO) for LPV descriptor systems to realize the actuator fault estimation and isolation. Astorga-Zaragoza et al. (2012) designed a model-based fault estimation observer that meets the
However, in actual situations, the process noise and measurement noise often vary drastically, which makes the aforementioned methods inefficient. As the fault vectors are independent of those of the state, the sensor faults are seen as the added vectors of an augmented descriptor system with noise. Thus, the sensor fault estimation and isolation problem of the descriptor systems is transformed into the state estimation one of the augmented descriptor models. It is widely known that the Kalman filter method works well in accurate state estimation for a system with noise, so our work is based on this background and processed in a further study.
Some preliminary methods were proposed for state estimation of descriptor systems by Kalman filtering. Darouach et al. (1993, 1995) realized the state estimation of the descriptor systems by a Kalman filter. Nikoukhah et al. (1999) researched the state estimation of discrete-time linear descriptor systems based on a recursive restructuring algorithm by transforming the estimation problem into one in which the next state does not influence the present one. Ishihara et al. (2006) proposed a robust Kalman filter for descriptor systems with uncertainties in a dynamic model. Zhou and Zhang (2009) improved the filter’s performance in Ishihara et al. (2006) by off-line convex optimization.
In the aforementioned studies, the existence of the singular matrix E in the dynamic model could not avoid calculating the process of the Kalman filtering, which makes the solution of the optimal filter more complex. To solve this problem, in this paper, a pair of parameters is introduced for transforming the sampled-data descriptor system into a non-singular one.
As the UKF algorithm has a more accurate estimation and better convergence compared with the extended Kalman filter (EKF) algorithm, it is widely used in the fault estimation of an ACSs model. However, if the process or measurement noise becomes greater, the practical predicted or measurement covariance is enlarged, and as a result, the UKF algorithm loses its accuracy. To solve this problem, an adaptive algorithm is proposed based on the innovation and the measurement residual to improve the performance of the UKF algorithm. The core character of this algorithm is adjusting the theoretical prediction or the measurement covariance to be equivalent to the practical one. Our method is superior to former studies as it simultaneously reduces the increased error created by the variation of the process and measurement noise, and its convergence is guaranteed. Thus, an accurate fault estimation of the descriptor systems is implemented by our method. To isolate the sensor faults, a multiple-model adaptive estimation (MMAE) algorithm is proposed based on the adaptive unscented Kalman filter (AUKF); the corresponding conditional probability of each AUKF shows that when the difference between the estimation value and the real value of the sensor fault is minimal, the corresponding probability density function is the maximal, which denotes the occurrence of a sensor fault.
This paper is organized as follows. In the next section, an ACSs model of satellite with sensor faults is proposed based on a non-linear sampled-data descriptor system, parameters are introduced and, by the Euler discretization method, the descriptor model is transformed into a non-singular augmented discrete-time model. Then, considering greater noise, an AUKF algorithm is proposed to realize accurate sensor fault estimation and a theorem is given to guarantee the convergence of our method. An MMAE algorithm is proposed based on the AUKF to realize the sensor fault isolation. Simulation examples are given to show the effectiveness of this method and finally conclusions are drawn.
Non-singular equivalent system modelling
Symbols and abbreviations in this paper are given in appendix A.
First consider an ACSs model of a satellite. The dynamic model is given as follows:

where J denotes the inertia matrix of the satellite expressed in a body frame and is expressed as
Defining

where
According to Darouach et al. (1995), C and R satisfy

Because of the existence of the singular matrix E in the dynamic model of the system (2), the process of the Kalman filter is extremely difficult. To solve this problem, parameters are introduced for transforming the sampled-data descriptor model into a non-singular discrete time model.
As

The general solution of H and G defined as

where
By Equation (4), system (2) is transformed into an equivalent non-singular augmented system with the number of q.

where
The transformation from (2) to (6) is seen in appendix B.
Sensor fault estimation and isolation by AUKF algorithm
Sensor fault estimation by AUKF algorithm
In this section, filters with a number of q are proposed for the equivalent system (6) to realize the sensor fault estimation of the ACSs model. Without considering the variation of noise, the UKF algorithm estimates the sensor fault effectively. However, if there exist greater processes or measurement noises in system (1), at this time the practical output of the predicted or measurement covariance is enlarged by its equivalent system (6), and as a result, the practical predicted or measurement covariance is not equivalent to the theoretical one, which makes the estimation inaccurate. To solve this problem, the AUKF algorithm is proposed.
Define the predicted mean error and the state estimation error as


Define the innovation and the measurement residual as


where
The real value of innovation covariance is expressed as the following equation:

where N denotes the width of the estimation window.
Based on the residual and the innovation, the AUKF algorithm is expressed as the following steps.
Step 1: Initialization.
where
Step 2: Prediction. Each of the sigma points is instantiated through the dynamic model to yield a set of transformed samples

The predicted mean error and its corresponding covariance are updated by the following equations

where
Step 3: Update. As the measurement equation of the system (6) is a linear one, the measurement update has the same form as the standard Kalman filter, shown as follows.
The sigma points of the measurements are expressed as

The weighed mean and covariance of the predicted measurements are calculated as

where
The cross-covariance between the predicted state and measurements is obtained as
The Kalman gain is determined by the following equation



Step 4. Repeat steps 1–3 for the next samples.
When the sensor fault occurs, its estimation is obtained as

In (15) and (18),
From Equations (7) and (9),


Substituting (11) and (18) into (25),

From Equations (9) and (10),

Using a post-multiplication for

Salahshoor et al. (2008) argued that the innovation and the residual obey the law of orthogonality with each other. So from Equation (28),
In Equation (29),

Substituting Equations (11), (15) and (30) into (29),
Thus, substituting the obtained
Step 1: Initialization. Implement Equation (12).
Step 2: Prediction. First, implement Equations (13) and (14).Then, substitute
Step 3: Update. First, implement Equation (17). Then, substitute
Step 4. Repeat steps 1–3 for the next samples.
The real sensor fault estimation is obtained by Equation (23).
Theorem 1 is proposed for guaranteeing the convergence of our method.

where

where

The proof of Theorem 1 is seen in appendix C.
Sensor fault isolation by AUKFMMAE algorithm
In this section, the AUKF algorithm is combining with the MMAE for isolating the sensor fault of the ACSs model. The state vectors of each AUKF were weighted by their corresponding probability and summed to calculate the estimated system state vector as follows:

where

in which

where
Simulation
In this section, simulation examples are given to verify the effectiveness of our method.
Case 1
Firstly, consider the ACSs model of a satellite that satisfies Equation (1), and assume
The theoretical covariance matrix of the process noise and the measurement noise are
Real parameters of the inertia matrix

Consider Equation (2), where
Choosing

and using Equation (5), H and G are obtained as
It is verified that H is a non-singular matrix.
First consider the discretized incipient faults in the sensor of the satellite as
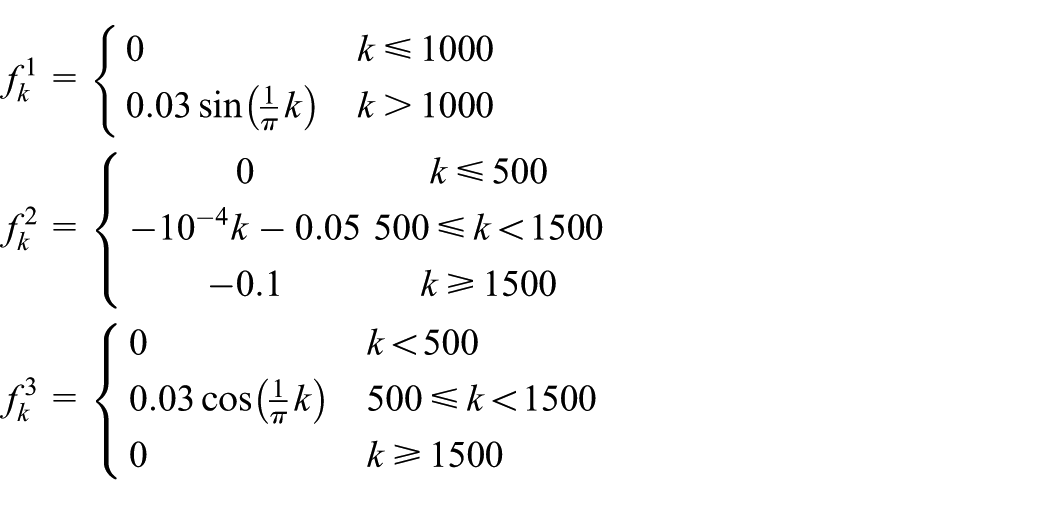
Figures 1(a1)–(c1) show the fault estimation in gradual scenario when
Fault estimation results by adaptive unscented Kalman filter (AUKF) and unscented Kalman filter (UKF) in gradual scenario: (a1)
Then we consider the discretized abrupt faults in the sensor of the satellite as
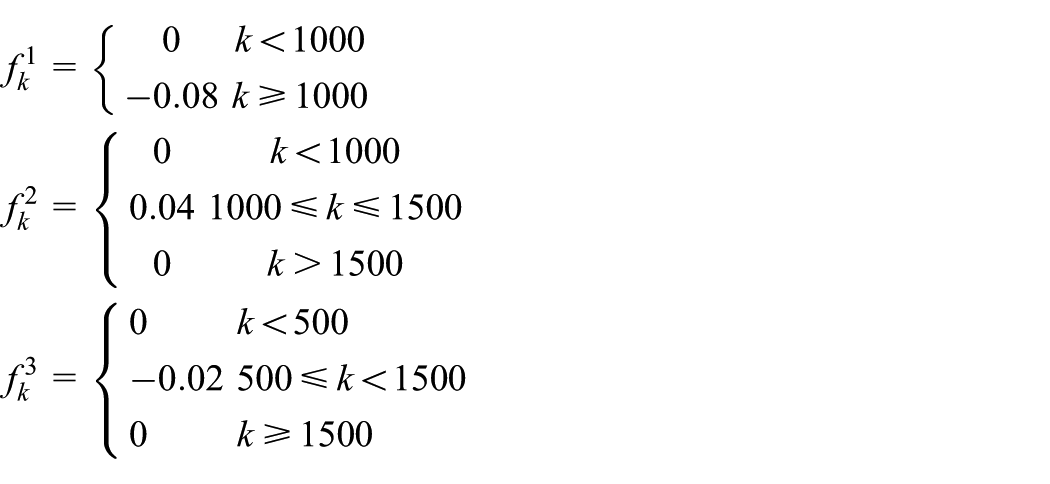
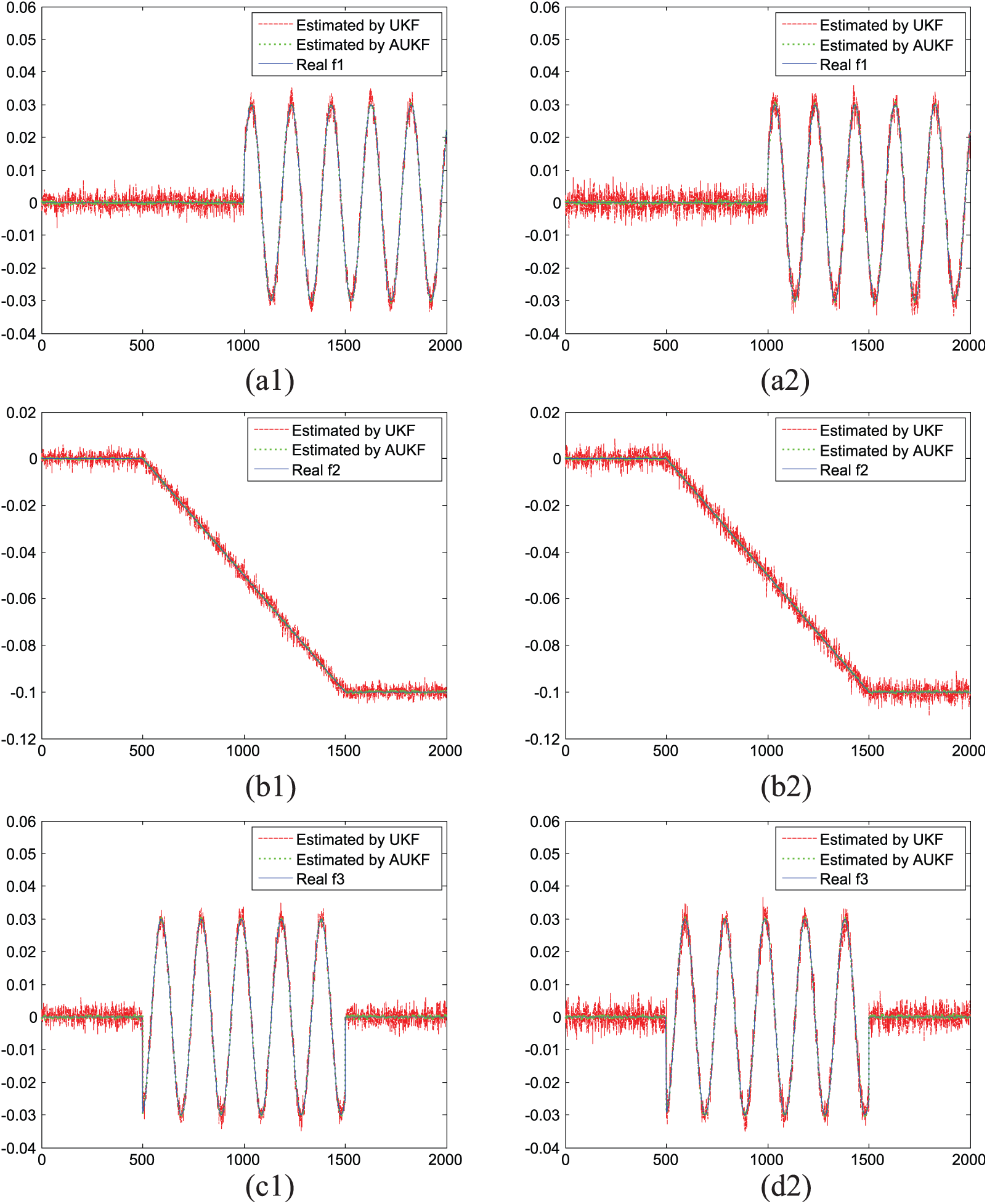
Figures 2 (a1)–(c1) show the fault estimation results in an abrupt scenario when
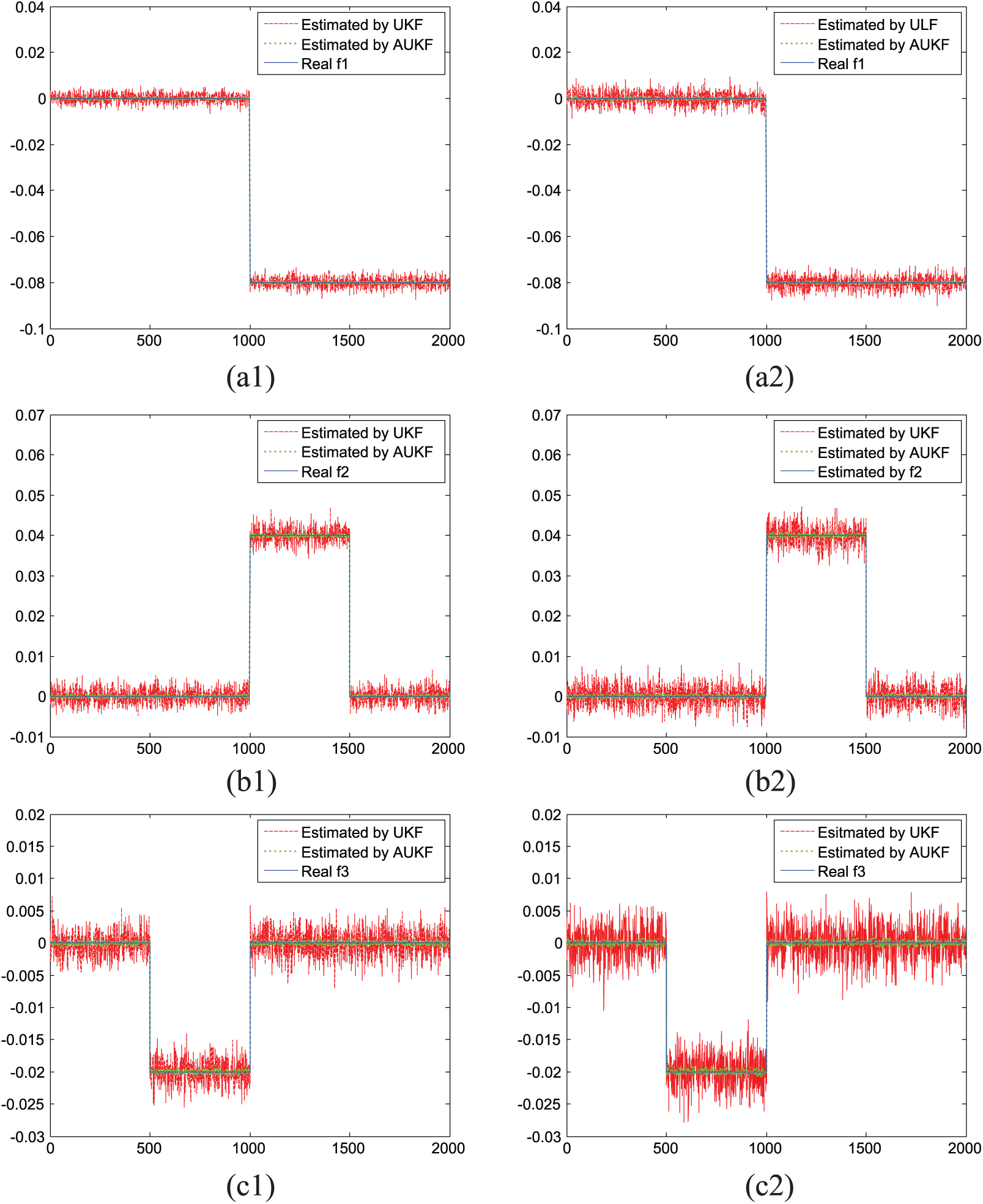
Faults estimation results by adaptive unscented Kalman filter (AUKF) and unscented Kalman filter (UKF) in an abrupt scenario: (a1)
Table 2 shows the root mean square error (RMSE) of
Root mean square error (RMSE) of fault estimation by adaptive unscented Kalman filter (AUKF) and unscented Kalman filter (UKF) in case 1 (
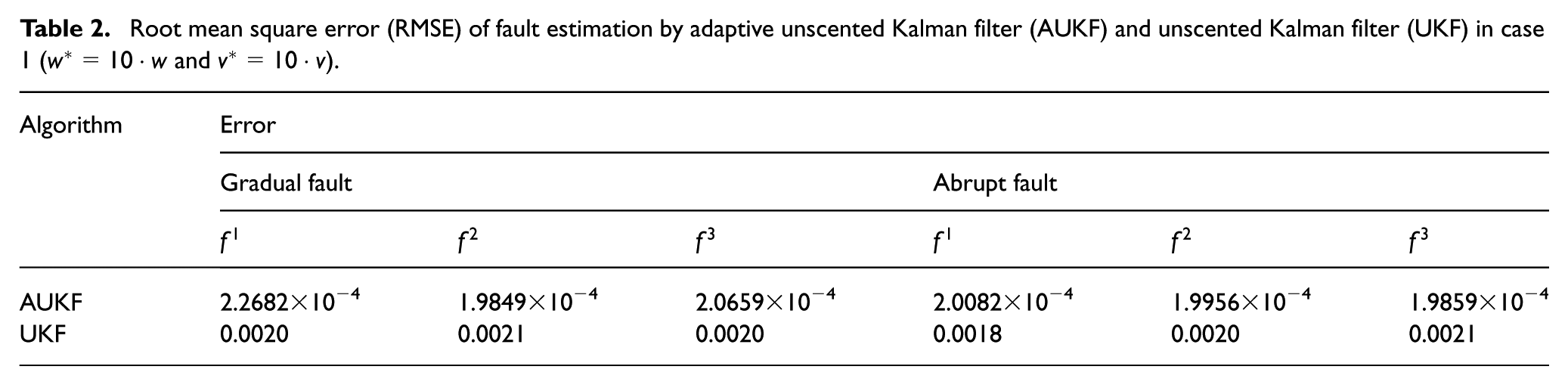
From Figures 1(a1)–(c1) and 2(a1)–(c1), it may be seen that, for both gradual and abrupt faults, when the process noise and the measurement noise are greater, the UKF algorithm loses its estimating accuracy. Conversely, as the AUKF algorithm adjusted the theoretical predicted covariance and measurement residual covariance based on the innovation and measurement residual, it has a robustness against the increasing of the process and measurement noise, and accurate sensor fault estimation is implemented by this method. RMSE results in Table 2 also imply this efficiency.
The performance of the three filers by the conventional UKF and proposed AUKF are shown in Figures 3 and 4 with different noise levels.
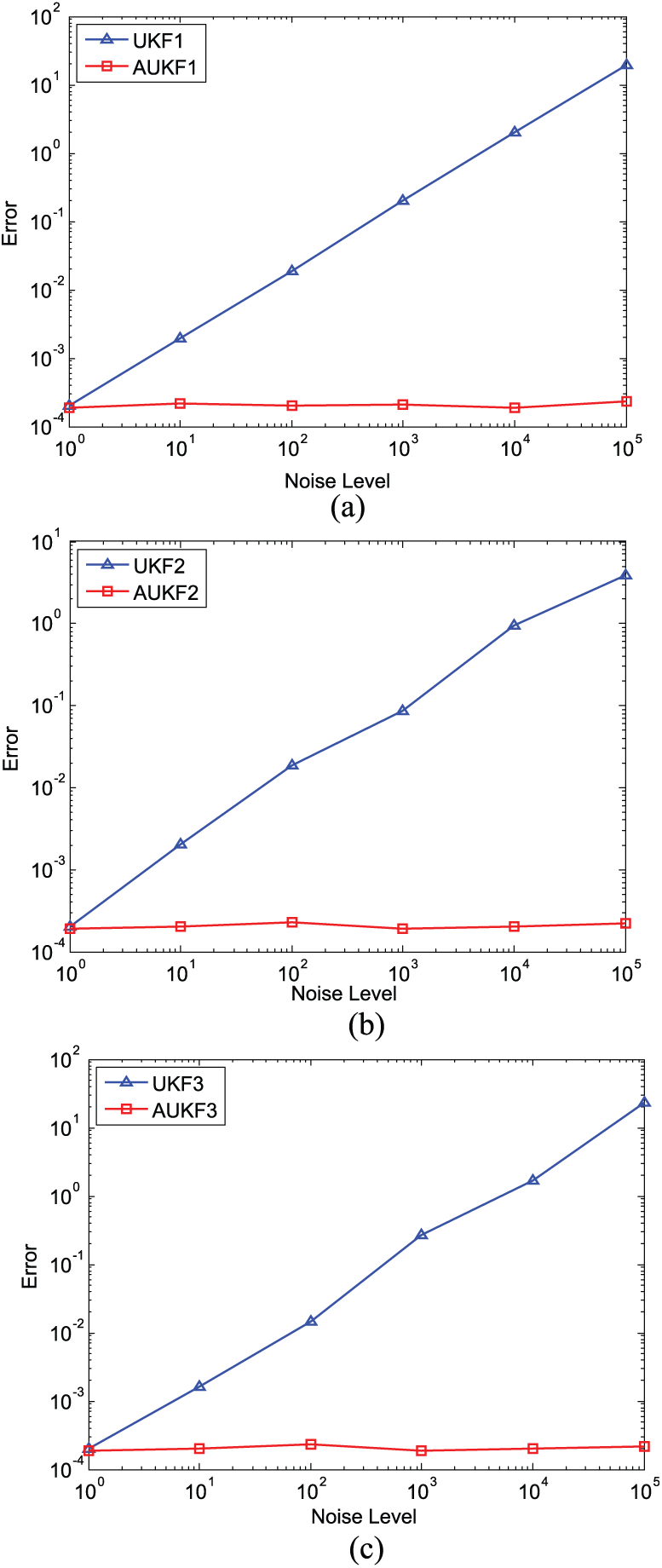
Performance of adaptive unscented Kalman filters (AUKFs) and unscented Kalman filters (UKFs) in different noise levels (fault in gradual scenario): (a) AUKF1 and UKF1; (b) AUKF2 and UKF2; (c) AUKF3 and UKF3.
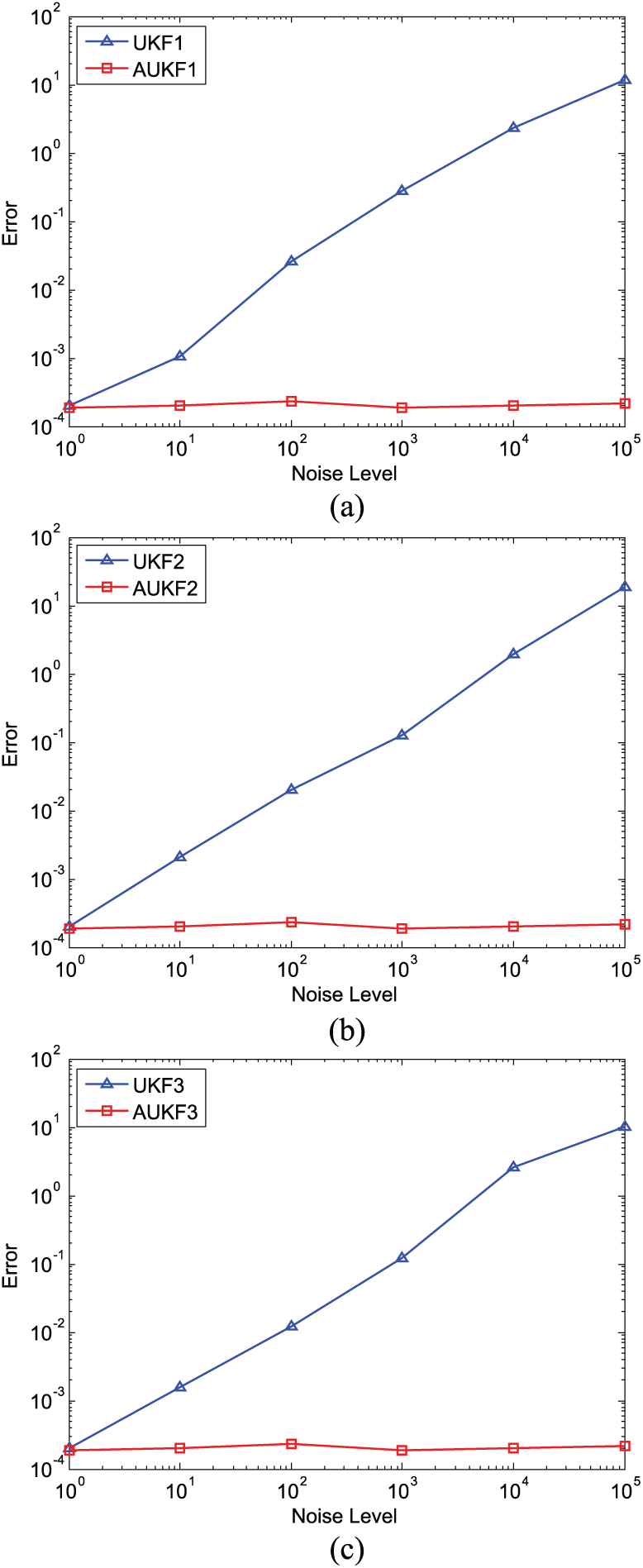
Performance of adaptive unscented Kalman filters (AUKFs) and unscented Kalman filters (UKFs) in different noise levels (faults in abrupt scenario): (a) AUKF1 and UKF1; (b) AUKF2 and UKF2; (c) AUKF3 and UKF3.
From Figures 3 and 4 it may be seen that the estimation error in conventional UKF increases synchronously as the greater noise exists in the dynamic model and measurement. On the contrary, the AUKF algorithm still maintains a smaller estimation error.
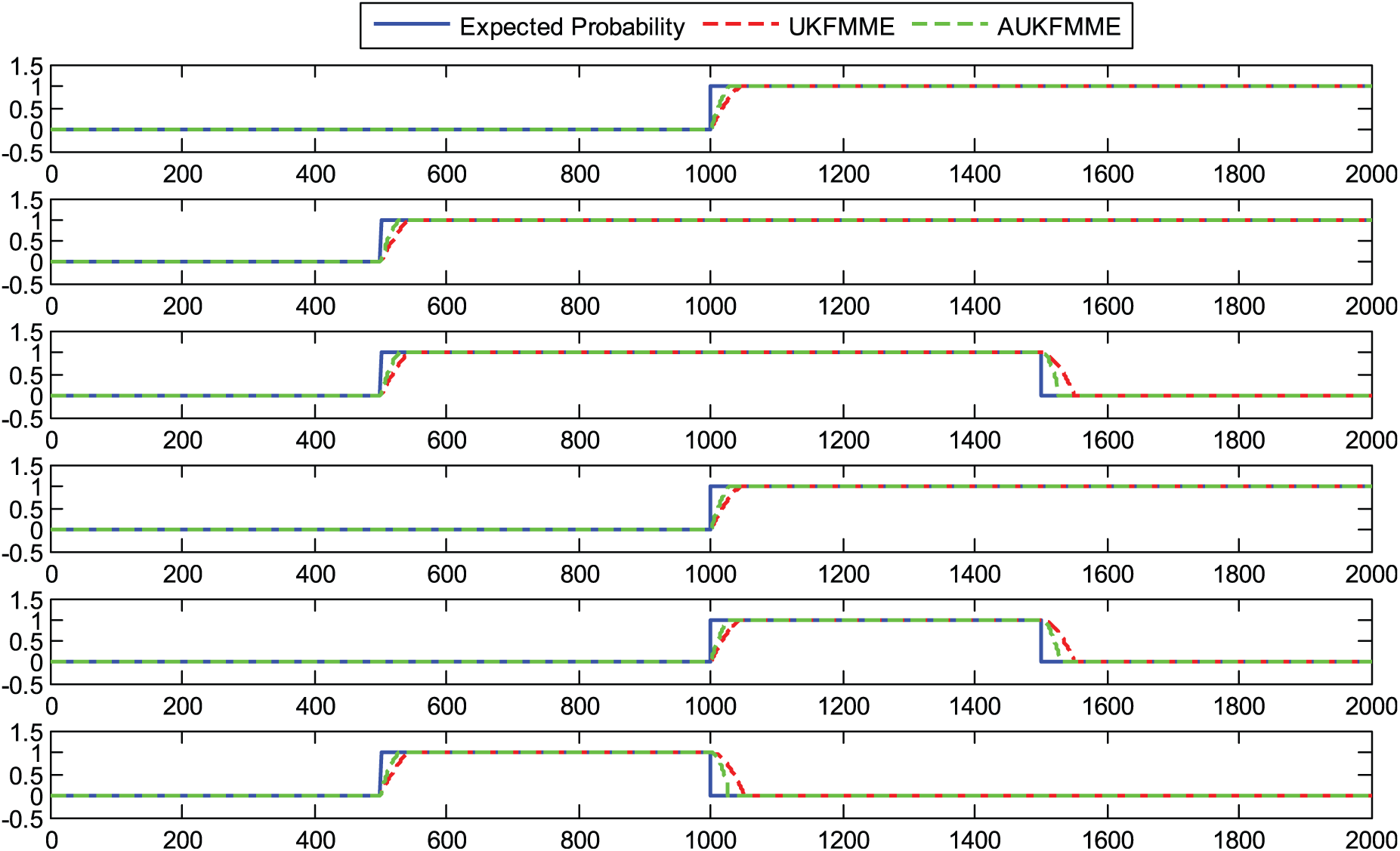
Figure 5 shows the faults probability results detected by the AUKFMMAE and the UKFMMAE algorithm in case 1. From Figure 5, it may be seen that the probability results detected by the AUKFMMAE were closer to the expected probability compared with the UKFMMAE, as the increase in the process and measurement noise was considered in the scheme of the AUKFMMAE algorithm. Thus, we realize a better sensor fault isolation of an ACSs model of a satellite by the AUKFMMAE algorithm.
Probability of each fault by adaptive unscented Kalman filter combined with multiple-model adaptive estimation (AUKFMMAE) and unscented Kalman filter combined with multiple-model adaptive estimation (UKFMMAE) in case 1.
Case 2
For further verification of our methods, choose
Root mean square error (RMSE) of faults estimation by adaptive unscented Kalman filter (AUKF) and unscented Kalman filter (UKF) in case 2 (
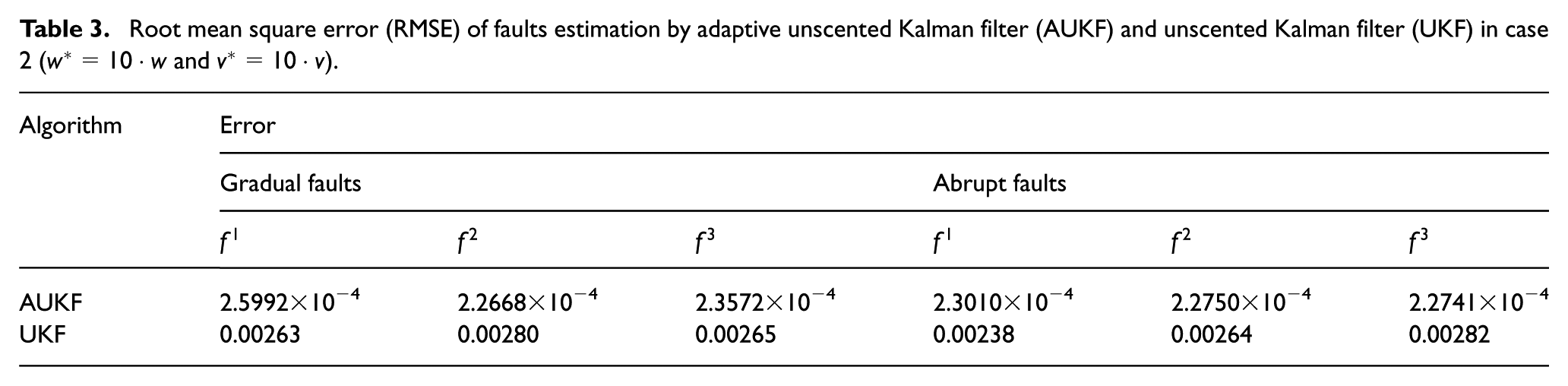
Table 4 shows the increasing percentages of RMSE in case 2 compared with in case 1. It may be seen that, when the inertia matrix is twice as large as that in case 1, the estimation error of the faults in UKF algorithm increases by more than 30% compared with case 1 and the increasing percentages by the AUKF algorithm are less than 15%, which shows the effectiveness of our method for sensor fault estimation in different situations of an ACSs model.
Increasing percentages of root mean square error (RMSE) in case 2 (
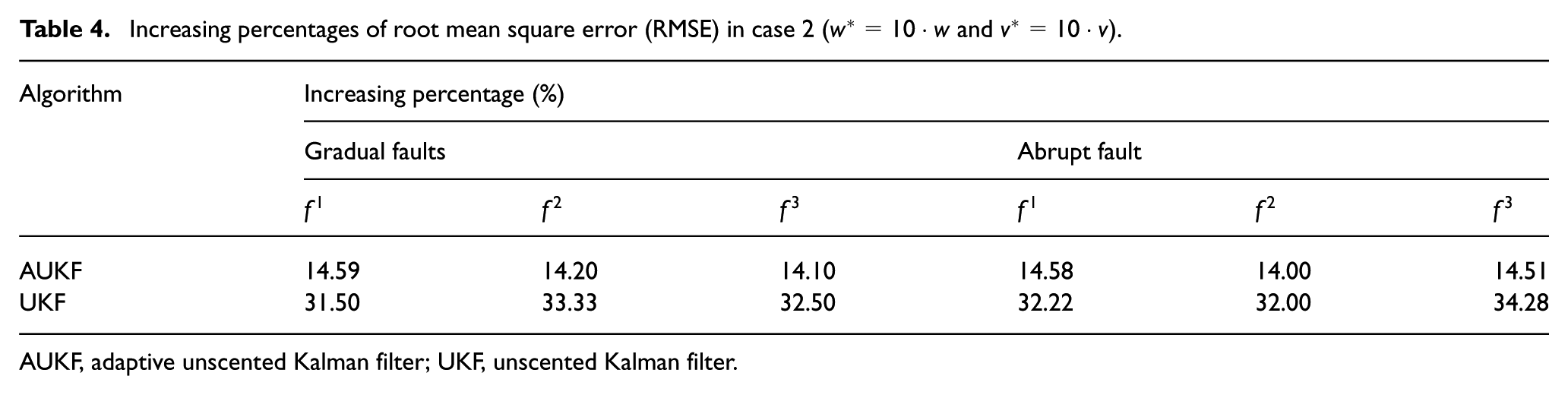
AUKF, adaptive unscented Kalman filter; UKF, unscented Kalman filter.
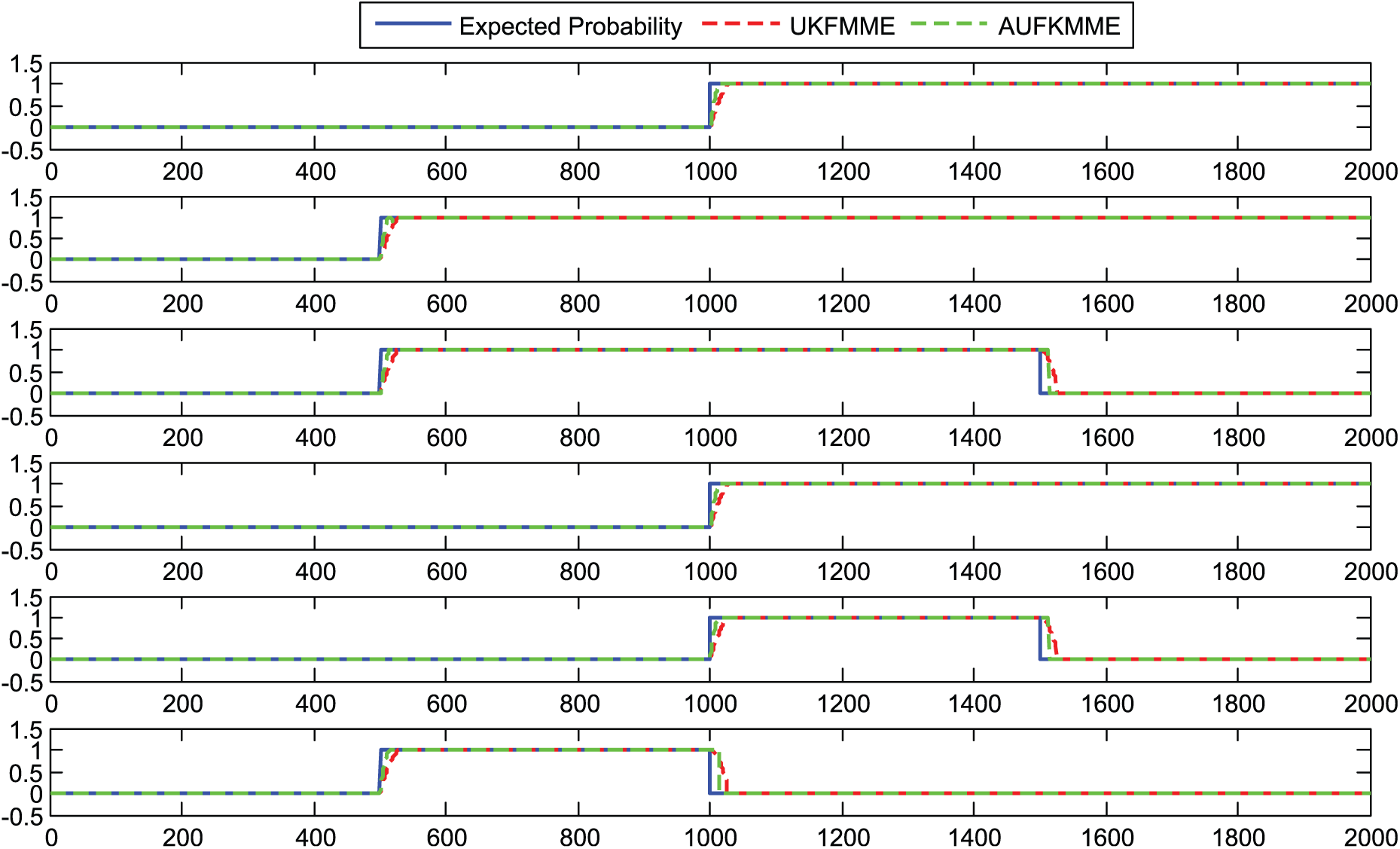
Figure 6 shows the fault probability results detected by the AUKFMMAE and the UKFMMAE algorithms in case 2. As the inertia matrix becomes larger, the probability results detected by both of the AUKFMME and UKFMME are further from those expected in case 2 than in case 1. Furthermore, the AUKFMME algorithm implemented more accurate fault isolation results compared with the UKFMME.
Probability of each fault by adaptive unscented Kalman filter combined with multiple-model adaptive estimation (AUKFMMAE) and unscented Kalman filter combined with multiple-model adaptive estimation (UKFMMAE) in case 2.
Conclusion
In this paper, for an ACSs model of a satellite on a sampled-data descriptor system, an adaptive algorithm is proposed for sensor fault estimation and isolation of its equivalent non-singular system, considering the greater system process and measurement noise influencing the estimation accuracy. The performance of the UKF algorithm is improved by this algorithm and the convergence of the AUKF algorithm is guaranteed. For both incipient and abrupt fault scenarios, the simulation results show that the AUKF algorithm has more accurate estimating results compared with the UKF algorithm. Using the MMAE algorithm with the AUKF, faults probabilities are closer to those expected, which denotes better sensor fault isolation efficiency by AUKFMMAE. Simulations in different situations further verify the effectiveness of our method compared with that of the UKF.
Footnotes
Appendix
Declaration of conflicting interest
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.