The problem of adaptive sliding mode control is considered for a class of stochastic switched systems with actuator degradation. In this work, the input matrix for each subsystem is unnecessarily the same. Thus, a weighted sum approach of the input matrices is introduced such that a common sliding surface is designed. By online estimating the loss of effectiveness of the actuators, an adaptive sliding mode controller is designed. It can not only compensate the effect of the actuator degradation effectively, but also reduce the conservatism that the bound of the actuator faults should be known in advance. Moreover, it is shown that the reachability of the sliding surface can be guaranteed. Furthermore, sufficient conditions on the mean-square exponential stability of the sliding mode dynamics are obtained via the average dwell time method. Finally, a numerical simulation example is given to demonstrate the effectiveness of the proposed method.
In practical engineering systems, the occurrence of sensor/actuator faults is inevitable. To increase reliability and availability of the controlled systems, the need for maintaining an acceptable performance for the controlled systems against actuator or sensor failures is becoming more apparent in many complex safety critical systems, such as aircraft, spacecraft, and nuclear power plants (Veillette et al., 1992). Over the past few decades, many methods, such as linear quadratic regulator (LQR) (Veillette, 1995), robust control (Dong and Yang, 2015) and adaptive control techniques (Boskovic et al., 2009) have been proposed. Recently, Yang and Ye (2010) proposed an adaptive reliable controller for linear systems.
As is well known, sliding mode control (SMC) is an effective robust control method due to its strong robustness against parameter uncertainties and external disturbances. In recent years, the design of SMC subject to actuator faults has been receiving more and more attention (Alwi and Edwards, 2008; Liu and Shi, 2013; Niu and Wang, 2009). Alwi and Edwards (2008) proposed an online SMC allocation scheme, in which the effectiveness level of the actuators was used in the re-distribution of the control signals when faults occur. Moreover, SMC for uncertain time-delay systems with partial actuator degradation was investigated in Niu and Wang (2009). Later, the results were further extended into It stochastic systems (Liu and Shi, 2013). More recently, an adaptive sliding mode controller has been presented for Markovian jumping systems (Li et al., 2017), by which the controller parameters can be updated automatically to compensate for the actuator faults.
On the other hand, switched systems play an important role in the modelling of many real systems subject to known or unknown abrupt parameter variations and sudden change of system structures. Therefore, many results on stability analysis and stabilization (Liberzon, 2003; Zhang and Gao, 2010; Zhao et al., 2017), reduced mode control (Su et al., 2015), admissibility analysis (Darouach and Chadli, 2013), and optimal control (Colanerio et al., 2014) have been obtained. Recently, the SMC method has been extended into switched systems and many constructive results have been obtained (Liu et al., 2015; Wu et al., 2011; Wu and Lam, 2008). Among them, Wu and Lam (2008) investigated SMC for a class of uncertain switched systems with state delay, whose result was further extended to stochastic switched systems inWu et al. (2011). Later, Liu et al. (2015) further considered the switched systems with different input matrices and constructed a common sliding surface via a weighted sum approach. In recent years, the reliable control of the switched systems has drawn more and more attention (Lin et al., 2013; Yin et al., 2017a). Yin et al. (2017a) investigated the state and fault estimation problem for linear switched systems with simultaneous disturbances, sensor and actuator faults. Later, the results were further extended into nonlinear Markovian jump systems (Yin et al., 2017b). Recently, Lin et al. (2013) considered the reliable dissipative control of a class of discrete switched singular systems with stochastic actuator faults. More recently, Liu et al. (2017) further considered the robust control for a class of discrete switched systems with both random sensor and actuator faults. However, to the author"s best knowledge, the research on SMC of stochastic switched systems subject to actuator faults is still open. Moreover, the existing results (Liu et al., 2015;Wu et al., 2011;Wu and Lam, 2008) cannot be simply extended to stochastic switched systems due to their special structure characteristics.
Motivated by the above discussion, this paper considers adaptive SMC for a class of stochastic switched systems with actuator faults. Our main contribution consists of the following three aspects. (i) A weighted sum approach of the input matrices is utilized to construct a common sliding surface since there may be different input channels for each system. (ii) To compensate for the effects of the actuator degradation, an adaptive SMC law is designed. It not only ensures the reachability of the specified sliding surface, but also attenuates the effect of the actuator degradation by online estimation of the bounded actuator degradation. (iii) By employing the average dwell time approach, sufficient conditions are obtained to guarantee the mean-square exponential stability of the sliding motion.
The rest of this paper is organized as follows. Section ‘Problem statement’ formulates the problem under consideration. A common sliding surface is designed in section ‘Design of the sliding surface’. Section ‘Reachability analysis’ presents an adaptive SMC law and discusses the reachability of the sliding surface. The stability of the sliding motion is analysed in section ‘Stability of the sliding mode dynamics’. A simulation example is given in section ‘Numerical simulation’. The final section gives the conclusion.
Notation: denotes the real n-dimensional space; denotes the real matrix space. For any vector , denotes the Euclidean norm or its induced matrix norm. For a real symmetric matrix M, means positive (negative) definite, and I is used to represent an identity matrix. and denotes the maximum and minimum eigenvalue of a matrix, respectively, is the mathematical expectation, rank (·) represents the rank of a matrix, and the part in a matrix induced by symmetry is denoted by *. Matrices, if not explicitly stated, are assumed to have compatible dimensions.
Problem statement
Consider the following stochastic switched systems
where is the state, is the control input subject to actuator faults, is the external disturbance, is a one-dimensional Brownian motion, , and are known matrices, and are parameter uncertainties, , , is a family of matrices depending on an index set , and is a piecewise constant function of time t called as switching signal that is characterized by the switching sequence . Moreover, means that the th subsystem is being activated when .
For each possible value , the parameters associated with the ith subsystem are denoted as
In this work, it is assumed that the admissible uncertainties and satisfy
where , , and are constant matrices, and are unknown matrix functions satisfying and .
Besides, the disturbance is assumed to be norm bounded, that is, , with a known constant.
In this work, the actuator degradation model is adopted as follows
with satisfying
where the unknown parameter denotes the loss of effectiveness of the jth actuator. The lower and upper bounds , of are supposed to be known. For convenience of later development, define , and .
Then, the system (1) with actuator degradation (2) is described by
Remark 1.It is noted that the actuator model (2) covers the non-faulty case and partial degradation case . However, it should be mentioned that the outage case is not considered. Actually, if this case happens, the full column rank condition of the control matrix cannot be guaranteed, which is a general assumption in SMC. Hence, this work does not consider this case.
The control objective of this work is to design an adaptive SMC law such that the stability of the switched system (4) can be guaranteed despite the presence of actuator degradation, uncertainties and stochastic disturbances. To this end, some preliminaries are first introduced, which are useful for the development of the main results.
Assumption 1.The matrix is full column rank, that is, .
Definition 1.(Liberzon, 2003) For any , let denote the number of switchings of over . If
holds for and , then is called the average dwell time.
In this work, let , as is usually used in the previous works.
Definition 2.(Wu et al., 2011) The equilibrium of system (4) is said to be mean-square exponentially stable if the solution satisfies
for scalars and .
Design of the sliding surface
In this section, a common sliding surface will be designed. It is worth noting that, in system (4), the input matrix for each subsystem is not necessarily the same. Hence, the proposed method in this work has a much wider application than some existing ones as in Wu and Lam (2008) and Wu et al. (2011). However, it also brings challenge in designing a common sliding function. To overcome this difficulty, the following weighted sum of the input matrices, as in Liu et al. (2015), is introduced
where is a parameter satisfying , with and being known constant.
Remark 2.It is noted from (5) that the weighted coefficients , , are required to be bounded, which is a relaxed condition in the controller design. Moreover, it is shown from Assumption 1 that, for general choice of scalars , B is full column rank.
Then, a common sliding function is constructed as
where . It can be seen from Remark 2 that B is full column rank generally, which implies that the non-singularity of can be guaranteed.
Remark 3.The sliding surface (6) is a common sliding function, that is, it is mode-independent. By designing such a sliding surface, the jumping of the state trajectories from different sliding surfaces can be avoided in the stability analysis.
Reachability analysis
In the sequel, an adaptive SMC law will be designed such that the state trajectories of system (4) can be driven onto the specified sliding surface .
In this work, the online estimation mechanism Yang and Ye (2010) is adopted. This can not only compensate the effect of the actuator degradation effectively, but also reduce the conservatism that the bound of the actuator failure should be known in advance. An adaptive SMC controller is designed as follows
with
where
is a positive scalars, is the Moore-Penrose inverse of the matrix D, , and is the estimation of . updates adaptively according to the following rule
where , is the updating gain, and denotes the projection operator (Ioannou and Sun, 2010), whose role is to project the estimation to the interval , and the matrix will be designed in Theorem 2. It is shown from (3) that the non-singularity of the matrix can be guaranteed.
Remark 4.It can be seen from the SMC law (7) that the matrix is required to be non-singular. As discussed in Remark 2, by selecting the parameters properly, the above non-singular condition can be guaranteed generally.
In the following theorem, we will analyse the reachability of the sliding surface .
Theorem 1.Consider the switched system (4) satisfying Assumption 1. The adaptive SMC law is designed as (7) and (8), then the state trajectories can be driven onto the specified sliding surface in finite time almost surely.
Proof. In view of (4) and (6), we have
Choose the Lyapunov function as
where . It can be derived from (9) and (10) that
Substituting (7) into (11) yields
Considering the adaptive law (8), we have
Denote . Combining (12) and (13), we have
In view of (14), it can be obtained that
This implies that
Then, considering the switching sequence and integrating (15) from to t and to it can be verified that there exists a time instant such that , and consequently , for (Huang and Mao, 2010). This implies that the state trajectories will be driven onto the specified sliding surface in finite time almost surely, which completes the proof.
Stability of the sliding mode dynamics
In the above section, we have discussed the reachability of the sliding surface. It is shown that the state trajectories of the system (4) can be driven onto the specified sliding surface . In the following part, we proceed to consider the stability of the sliding mode dynamics.
Substituting the adaptive SMC law (7) and (8) into system (4), the closed-loop system is obtained as follows
Now, the results on mean-square exponential stability of the sliding motion will be presented in the following theorem.
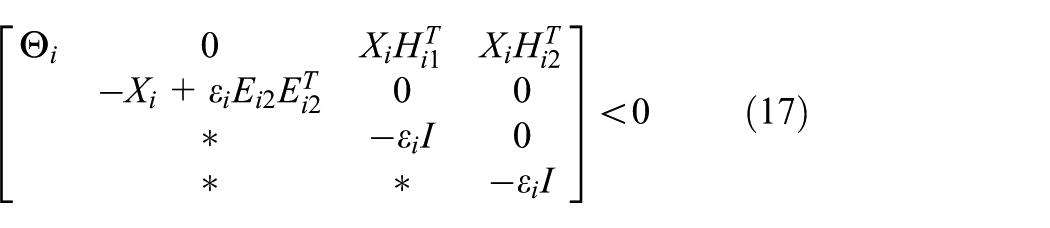
Theorem 2.Consider the system (4) satisfying Assumption 1. Given the scalar , if there exist matrices , , and parameters , , satisfying the following linear matrix inequalities (LMIs) with equality constraints
with
and the average dwell time satisfying
with the parameter
the sliding mode dynamics of the system (4) is mean-square exponentially stable for arbitrary switching signal . Furthermore, the norm of the state obeys
where
Moreover, the gain matrix in (7) is designed by .
Proof. Consider the Lyapunov function of the ith subsystem as
Thus, along the state trajectory of system (16), we get
It can be obtained from (18) that
Thus, when the system states are driven onto the sliding surface , we have , which yields
It is noted that is equivalent to the following LMI
By Schur’s complement, it can be seen that (24) is implied by the following LMI
Let and . Multiplying and its transpose on the left and right side of (25) yields
which is equivalent to
where , , and .
In view of Schur’s complement, it is shown that (26) is implied by (17), which together with (24) gives
Thus, it can be obtained that
which means that each subsystem of the closed-loop system (16) is mean-square exponentially stable.
Suppose that , is the switching instant and the system switches from the jth subsystem to the ith subsystem. Hence, we have and . In view of (20) and (27), we get
Considering (28), we have
In view of (21), the following holds
Therefore, it follows from (29) and (30) that
According to (19) and (31), it is shown that the sliding mode dynamics of the system (4) is mean-square exponentially stable, which completes the proof.
Remark 5.It can be seen from Theorems 1 and 2 that if the LMIs (17) and the equality constraint (18) are feasible, the adaptive SMC law (7) and (8) can guarantee the mean-square exponential stability of the switched systems (4). Moreover, it is worth noting that the equality constrains (18) is introduced such that the stability of the closed-loop system (16) can be analysed on the sliding surface . Accordingly, the result on stability of the sliding mode dynamics is obtained.
Next, a simple algorithm is proposed to solve LMIs with equality constrains as (17) and (18). Consider the equality conditions
with satisfying LMIs (17), which can be equivalently converted to
For , , consider the following LMIs
By using Shur’s complement, (32) is equivalent to
Hence, the stochastic stability problem of the sliding mode dynamics is converted into the problem of searching the global solution of the following minimization problem
This is a minimization problem involving linear objective and LMI constrains that can be solved by using LMI tools in Matlab.
Numerical simulation
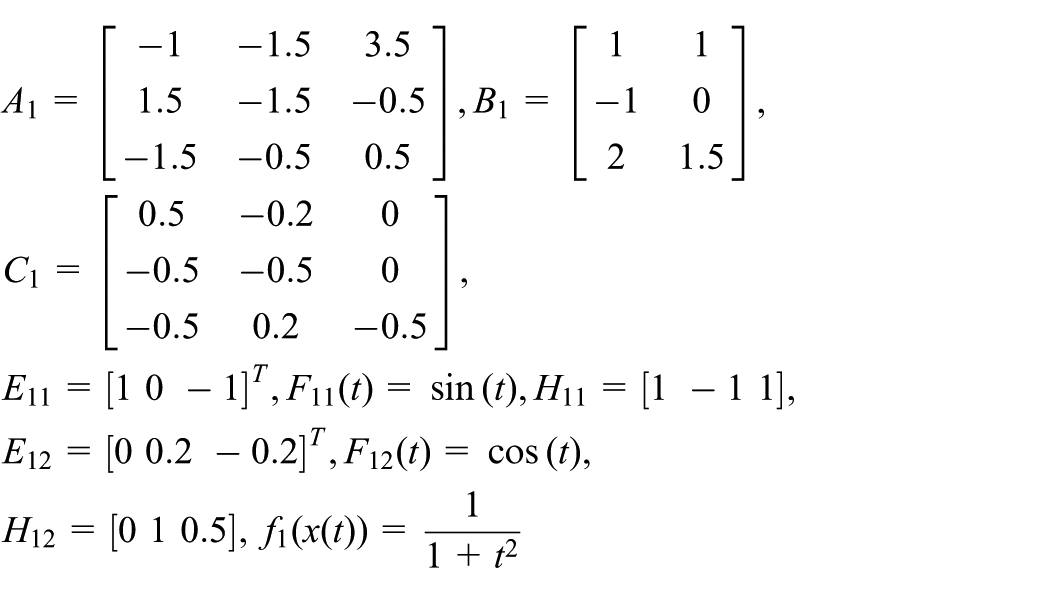
In this section, a numerical example is given to illustrate the effectiveness of the designed method. Consider the switched systems (4) with two modes and parameters as in the following.
Subsystem 1:
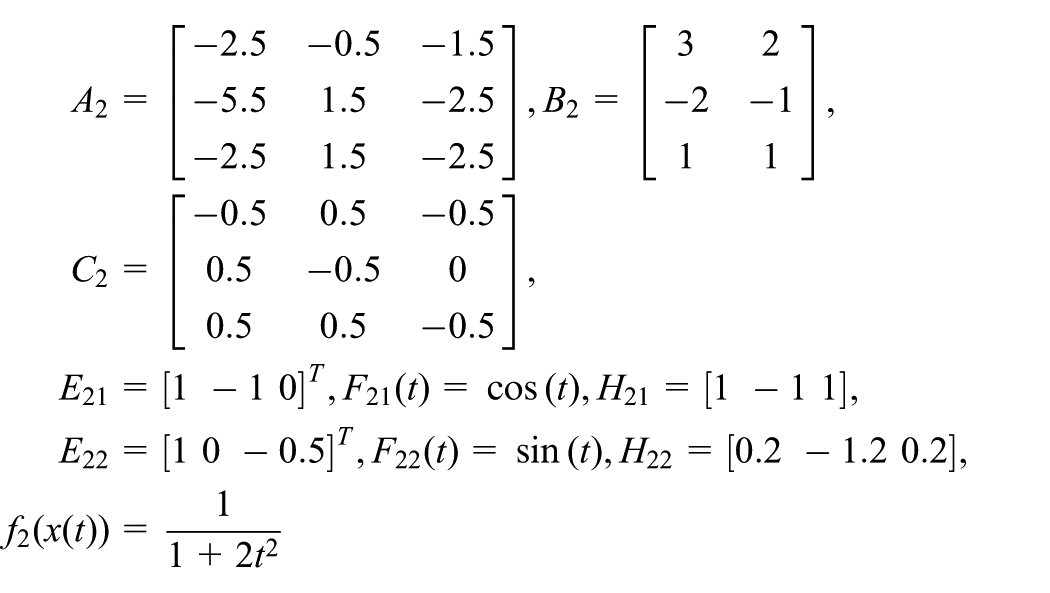
Subsystem 2:
The actuator faults are supposed to happen all the time. Moreover, assume that the actuator degradation model in (2) is as follows
By choosing , it can be easily shown that is non-singular. Thus, the desirable sliding function (6) is designed as
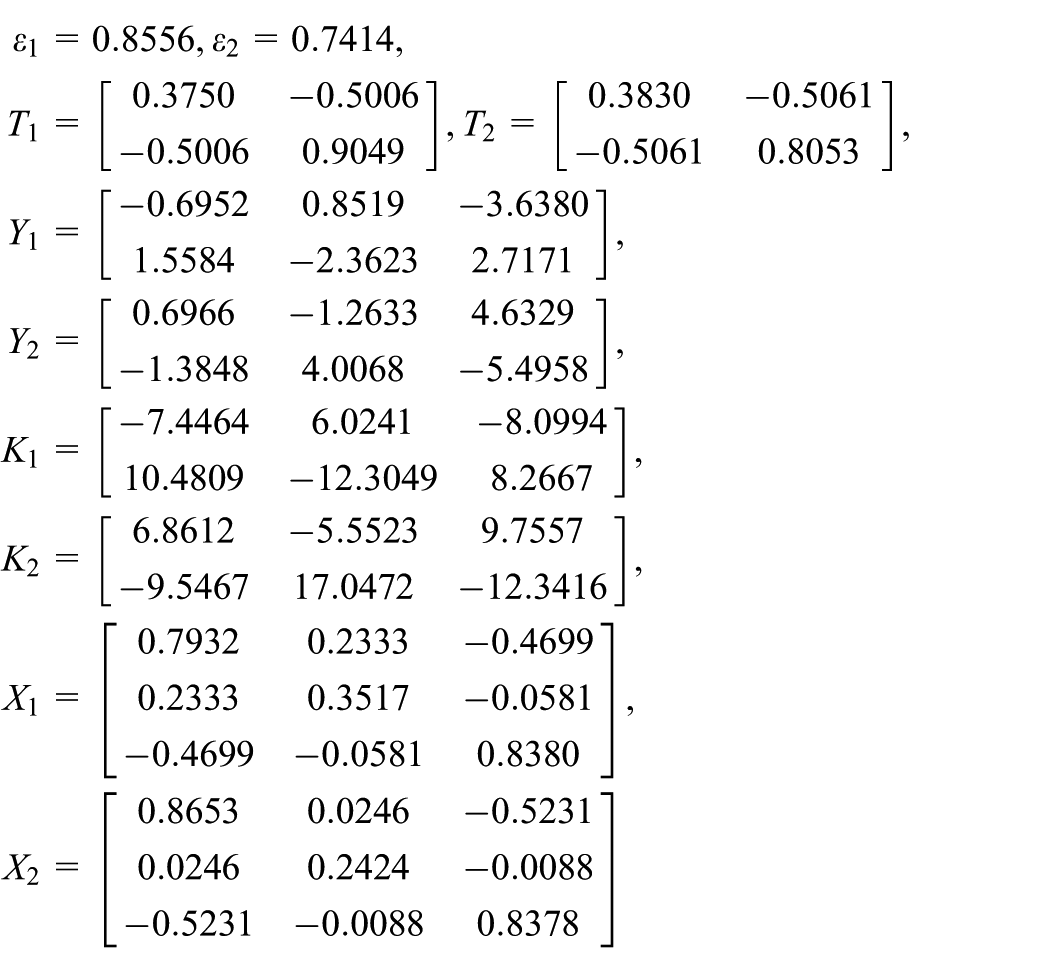
Moreover, for , solving the minimization problem (34) yields
, and (that is the constrains , are satisfied).
According to Theorem 2, the parameters , and are designed, respectively, as follows
Therefore, it can be obtained that
and the average dwell time can be designed as
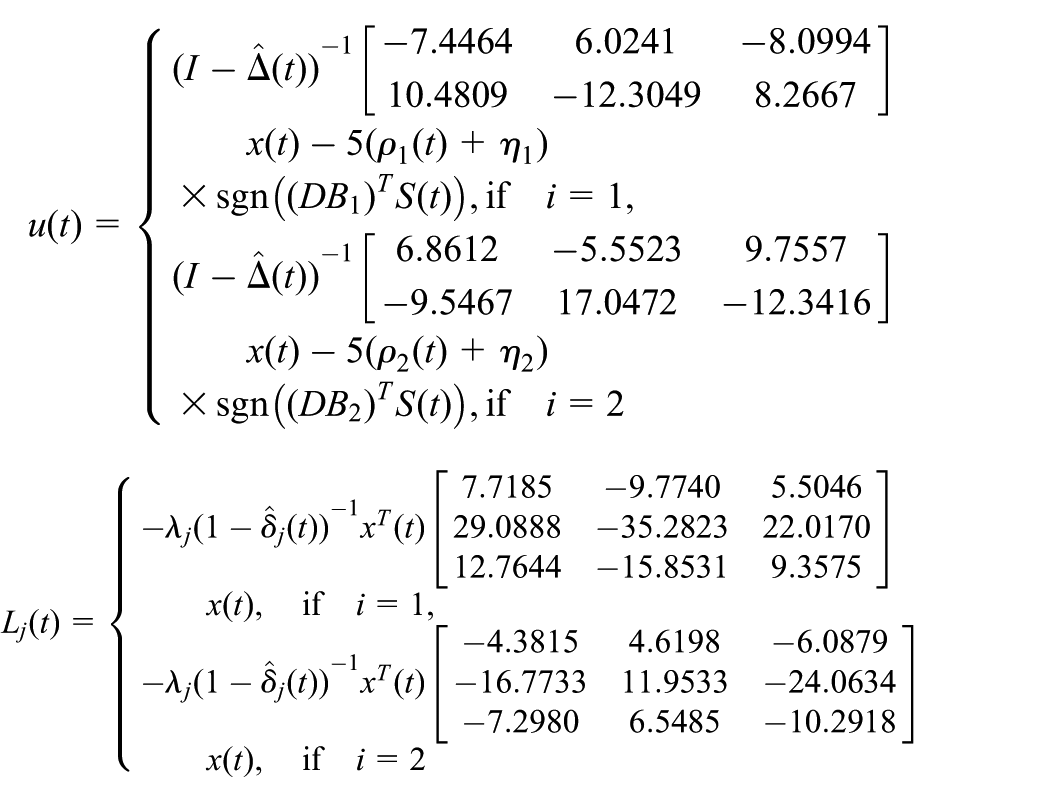
In view of (7) and (8), the adaptive SMC law is designed as
where
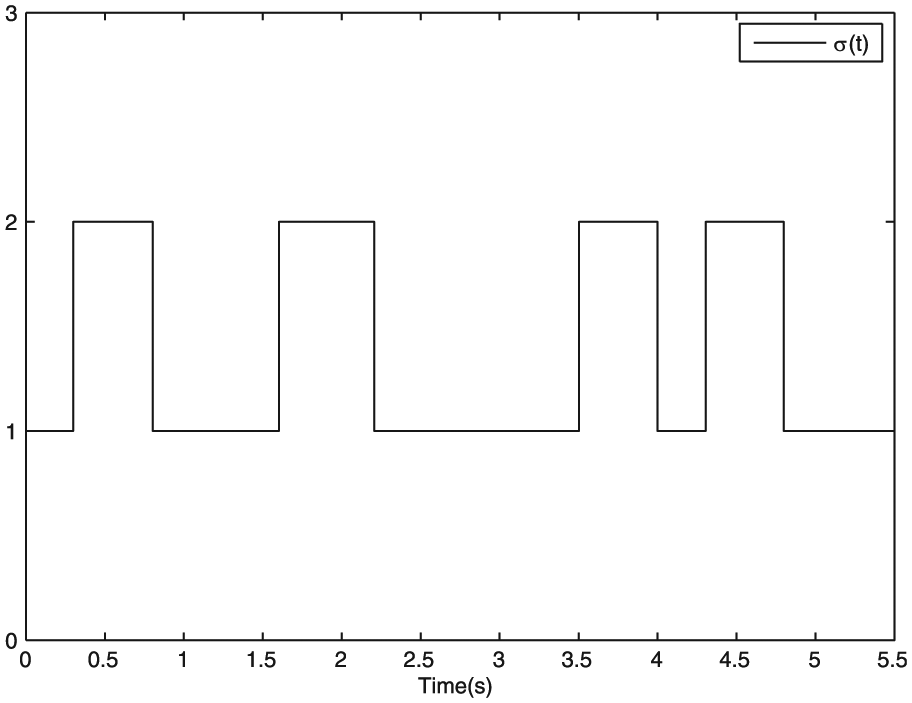
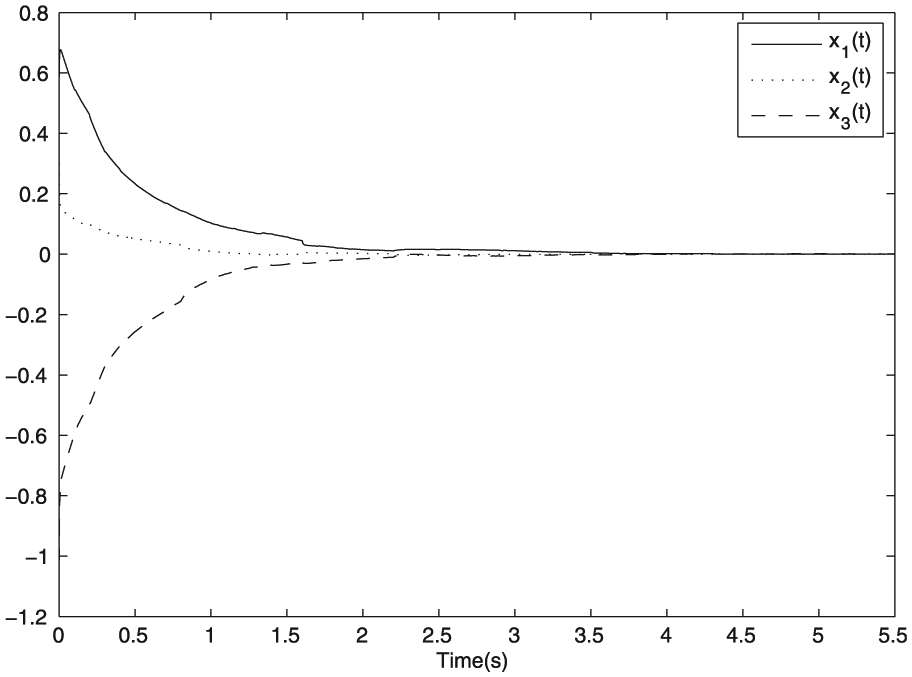
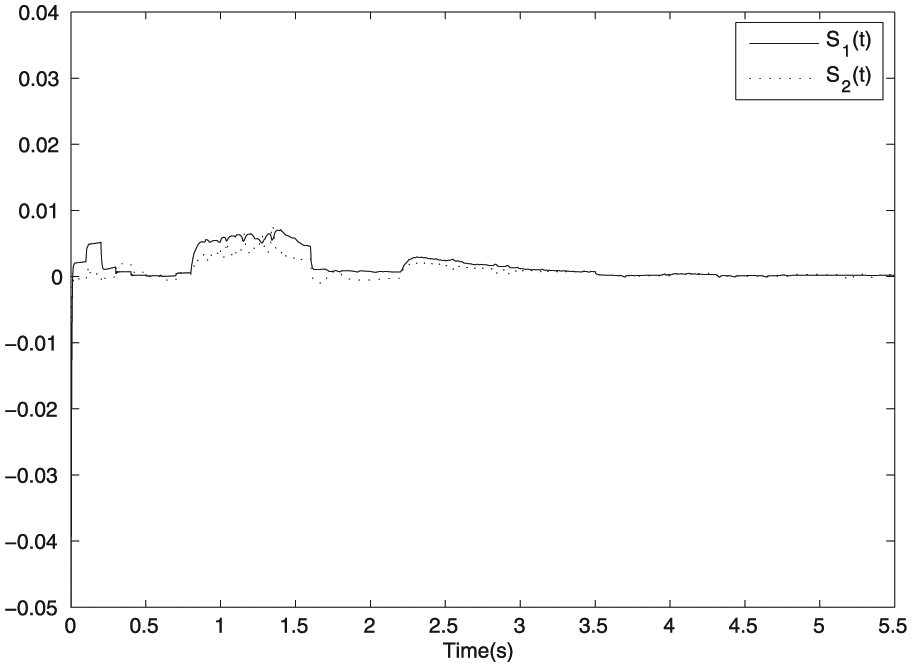
Then, choose the parameters , , , and . For the initial state , the simulation results with the proposed adaptive sliding mode controller are illustrated in Figures 1 to 4. The switching signal is given in Figure 1. The control signal is depicted in Figure 4. It can be seen from Figures 2 and 3 that the states , and will be driven onto the domain of the sliding mode and exponentially tend to zero. The state trajectories are attracted towards the designed sliding surface, which shows that the proposed method in this paper can effectively cope with the effects of actuator faults.
Switching signal .
State trajectories .
Sliding variables .
Control signals .
Conclusion
In this paper, the problem of adaptive SMC for a class of stochastic switched systems subject to actuator degradation has been studied. By employing the weighted sum approach, a common sliding surface is designed. Moreover, to compensate the loss of effectiveness of the actuators, an adaptive sliding mode controller is designed. It is noted that in this work only the actuator faults have been considered. In future research, simultaneous sensor and actuator fault phenomena, as in Youssef et al. (2017), may be further considered.
Footnotes
Conflict of interest
The authors declare that there is no conflict of interest.
Funding
This work was supported by the basic research project of Shanghai Dianji University (A1-0227-18-016-04).
References
1.
AlwiHEdwardsC (2008) Fault tolerant control using sliding modes with on-line control allocation. Automatica44(7): 1859–1866.
2.
BoskovicJDJacksonJAMehraRKet al. (2009) Multiple-model adaptive fault tolerant control of a planetary lander. Journal of Guidance, Control, and Dynamics32(6): 1812–1826.
3.
ColanerioPMiddletonRHChenZet al. (2014) Convexity of the cost functional in an optimal control problem for a class of positive switched systems. Automatica50(4): 1227–1234.
4.
DarouachMChadliM (2013) Admissibility and control of switched discrete-time singular systems. Systems Science & Control Engineering1(1): 43–51.
5.
DongJYangG (2015) Reliable state feedback control of TCS fuzzy systems with sensor faults. IEEE Transactions on Fuzzy Systems23(2): 421–433.
6.
HuangLMaoX (2010) SMC design for robust H∞ control of uncertain stochastic delay systems. Automatica46(2): 405–412.
LiHShiPYaoD (2017) Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults. IEEE Transactions on Automatic Control62(4): 1933–1939.
9.
LiberzonD (2003) Switching in Systems and Control. Boston: Birkhäuser.
10.
LinJShiYFeiSet al. (2013) Reliable dissipative control of discrete-time switched singular systems with mixed time delays and stochastic actuator failures. IET Control Theory & Applications7(11): 1447–1462.
11.
LiuMShiP (2013) Sensor fault estimation and tolerant control for Itȏ stochastic systems with a descriptor sliding mode approach. Automatica45(9): 1242–1250.
12.
LiuYHNiuY (2017) Robust H∞ control for discrete switched systems with random sensor and actuator faults. Journal of Control, Automation and Systems15(6): 2660–2668.
13.
LiuYHJiaTNiuYet al. (2015) Design of sliding mode control for a class of uncertain switched systems. International Journal of Systems Science46(6): 993–1002.
14.
NiuYWangX (2009) Sliding mode control design for uncertain delay systems with partial actuator degradation. International Journal of Systems Science40(4): 403–409.
15.
SuXWuLShiPet al. (2015) Model approximation for fuzzy switched systems with stochastic disturbance. IEEE Transactions on Fuzzy Systems23(5): 1458–1473.
VeilletteRJMedanicJVPerkinsWR (1992) Design of reliable control systems. IEEE Transactions on Automatic Control37(3): 290–304.
18.
WuLHoQWCLiCW (2011) Sliding mode control of switched hybrid systems with stochastic perturbation. Systems and Control Letters60(8): 531–539.
19.
WuLLamJ (2008) Sliding mode control of switched hybrid systems with time-varying delay. International Journal of Adaptive Control and Signal Processing22(10): 909–931.
20.
YangGYeD (2010) Reliable H∞ control for linear systems with adaptive mechanism. IEEE Transactions on Automatic Control55(1): 242–247.
21.
YinSGaoHQiuJet al. (2017a) Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults. Automatica76: 282–292.
22.
YinSYangHKaynakO (2017b) Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults. IEEE Transactions on Automatic Control62(7): 3551–3558.
23.
YoussefTChadliMKarimiHRet al. (2017) Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. Journal of the Franklin Institute354(6):2524–2542.
24.
ZhangLGaoH (2010) Asynchronously switched control of switched linear systems with average dwell time. Automatica46(5): 953–958.
25.
ZhaoXShiPYinYFet al. (2017) New results on stability of slowly switched systems: A multiple discontinuous Lyapunov function approach. IEEE Transactions on Automatic Control62(7): 3502–3509.