
Abstract
This paper proposes a non-iterative state feedback design approach for polynomial systems using polynomial Lyapunov function based on the sum of squares (SOS) decomposition. The polynomial Lyapunov matrix consists of states of the system leading to the non-convex problem. A lower bound on the time derivative of the Lyapunov matrix is considered to turn the non-convex problem into a convex one; and hence, the solutions are computed through semi-definite programming methods in a non-iterative fashion. Furthermore, we show that the proposed approach can be applied to a wide range of practical and industrial systems that their controller design is challenging, such as different chaotic systems, chemical continuous stirred tank reactor, and power permanent magnet synchronous machine. Finally, software-in-the-loop (SiL) real-time simulations are presented to prove the practical application of the proposed approach.
Keywords
Introduction
Stability analysis of nonlinear systems is a challenging problem attracting researchers’ attention in recent decades. Based on the Lyapunov function and storage function techniques, different approaches are proposed to handle the nonlinear system stability analysis and performance issues (Khalil, 2002). However, these approaches are generally analytically complicated, motivating numerical stability analysis approaches (Rakhshan et al., 2016; Tanaka, 2001).
Recently, linear matrix inequality (LMI) technique is widely used as a numerical approach which can be solved by convex optimization (Boyd et al., 1994). To derive the controller design of nonlinear systems in terms of LMIs, Takagi-Sugeno (TS) fuzzy or linear parameter varying (LPV) models are commonly used (Tanaka et al., 1998; Vafamand and Rakhshan, 2017). In these models, the original nonlinear system is described by a polyhedron region whose vertices are the local representation of the original system. Owing to the convex property of the obtained polyhedron, the controller design conditions are then formulated based on the vertices (Jaadari, 2013). However, in the majority of the existing proposed approaches, the information of fuzzy membership functions and the varying parameters are not considered in the controller design conditions, which yields to conservative results.
Recently, the sum of squares (SOS)-based decomposition approaches provide a method of designing controllers in a less conservative and less complex fashion through the semi-definite programming and defining polynomial matrix inequalities (PMIs) (Papachristodoulou and Prajna, 2005). Comparing with the LMI conditions, PMIs can be applied to a wider class of static and dynamic systems, particularly, polynomial systems. Furthermore, the TS fuzzy or LPV models that are obtained by sector nonlinearity concept or first-order approximation of Taylor series (Tanaka, 2001) only represent the original system in a local region. Meanwhile, the SOS-based approaches can be directly applied to such polynomial systems in a global fashion.
Polynomial models can effectively describe the behavior of a wide range of industrial applications, process plants, chaotic and hyperchaotic phenomena (Mardani et al., 2017; Pitarch et al., 2017, 2016; Rakhshan et al., 2017; Vafamand et al., 2017c). However, there are limitations in the controller design process; for example, in order to be able to exploit the convex optimization framework, some researchers try to constrain the Lyapunov function to be only a function of the states whose corresponding rows in the control matrix are zero, and its inverse has a specific form (Prajna et al., 2004; Tanaka et al., 2009). Furthermore, Papachristodoulou and Prajna (2005) proposed an iterative SOS approach in order to convert the non-convex optimization problem to a convex one. Although these approaches change the non-convex optimization problem into a convex problem, they increase the conservativeness of the solution.
In this paper, we present a non-iterative algorithm based on the SOS decomposition to solve the polynomial matrix inequalities in order to find a proper controller while reducing the conservativeness. Furthermore, we show that one can achieve a tradeoff between computational cost and controller structure simplicity using the polynomial static state feedback control law stated in terms of the polynomial matrix inequalities.
The main contributions of this paper can be summarized as follows:
Despite Prajna et al. (2004) and Tanaka et al. (2009), the Lyapunov function in the proposed control design does not require to be a function of those states whose corresponding rows in control matrix are zeroes.
This paper solves the problem of non-singularity of polynomial matrices that cannot be guaranteed in Ma and Yang (2009).
The proposed approach reduces the number of SOS variables and avoids the curse of dimensionality for high-order systems, which was encountered in Hindi (2002), Ma and Yang (2009) and Zhao and Wang (2009).
It is shown through numerical simulation that many systems with challenging stability analysis and controller design such as chaotic systems, chemical reactor systems, and electrical motors, can be controlled with a polynomial controller.
Finally, software-in-the-loop (SiL) real-time simulations are presented to prove the practical application of the proposed controller.
The rest of the paper is organized as follows: Section 2 provides the main concepts of the SOS decomposition and the system description. Stability conditions are discussed in Section 3. Simulation and comparison results are given in Section 4. Finally, conclusions are drawn in Section 5.
Preliminaries
In this section, a brief review of SOS decomposition and system description are provided. The reader can refer to Papachristodoulo and Prajna (2002) and Parrilo (2000) for more detail.
SOS programming
Generally, a SOS problem is to examine the non-negativity of a polynomial
A monomial in

Consequently, the scalar polynomial function

However, in many problems, we encounter with polynomial matrices and it is necessary to investigate the positivity of such matrix terms. Let
There exists a polynomial matrix
System description
Consider the following polynomial state space representation

where

where

The goal is to derive stabilization conditions in terms of polynomial matrix inequalities, which can be solved effectively by SOS techniques.
Stability conditions
To obtain stability conditions, the following polynomial quadratic Lyapunov function candidate is employed

where

where


where

Substituting the closed-loop system (5) into (10), results in:

Since

Substituting (12) into (11), one obtains:
By employing the congruence transformation (Vafamand et al., 2017a), the negative definiteness of

By defining

Since P is a polynomial matrix in x, therefore, based on the chain derivation law, one has

As a result, the product of unknown term

Therefore, the SOS decomposition condition (9) is obtained. Also, (8) is a sufficient condition to guarantee the positive definiteness of polynomial Lyapunov function (6).
Figure 1 summarizes the general approach of the proposed control strategy for polynomial systems. As is shown in this flowchart, first the dynamics of the desired system are considered based on (3). By applying Theorem 1 and using SOSTOOLS, we obtain
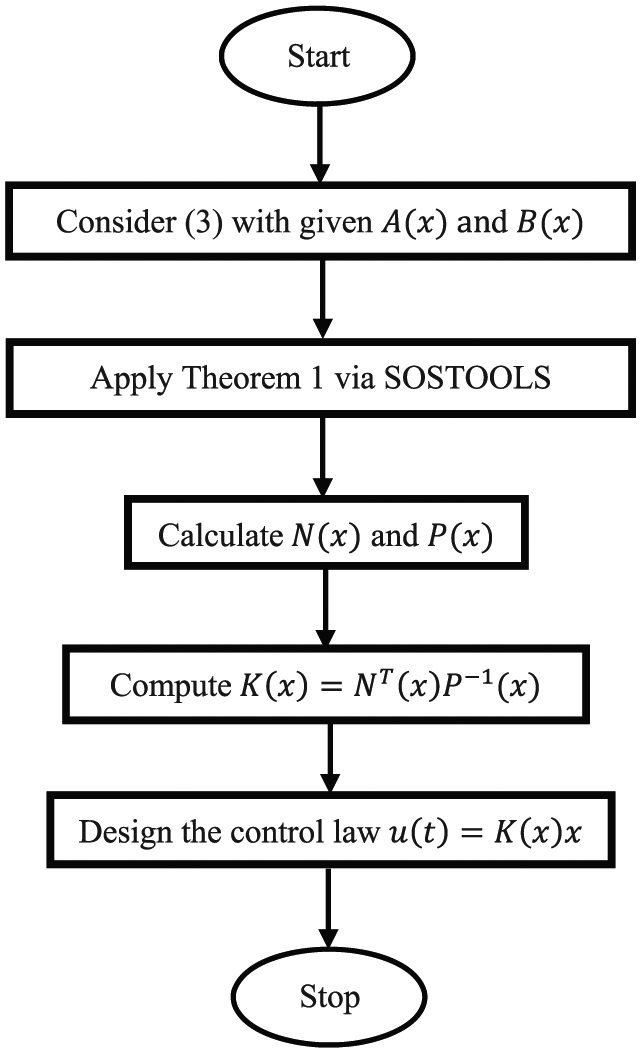
The design procedure of the proposed approach.
Simulation study
In this section, four control design examples for a chemical reactor, two chaotic systems, and an electric motor are discussed to demonstrate the effectiveness of the proposed methodology in the Software-In-the Loop (SiL) simulation technique. The structure of the SiL is shown in Figure 2, which consists of (1) OPAL-RT as a Real-Time Simulator (RTS) that simulates the proposed controller depicted in Figure 1; (2) a PC as the command station (programming host) in which Matlab/Simulink based code that is executed on the OPAL-RT is generated; and (3) a router used as a connector of all the setup devices in the same sub-network. The OPAL-RT is also connected to the DK60 board through Ethernet ports (Khooban, 2017, 2018).

The real-time setup.
The model-to-data workflow of the system model under the test is shown in Figure 3. To make the Simulink model of the complete system, including the proposed method compatible with the Opal-RT, the model is discretized and compiled with the help of MATLAB and the Opal RT-Lab library. After editing, the complete system model is split into three subsystems as master, slave and console for RT-Lab simulation. In the master subsystem, the system’s model excluding the controllers and the scope is kept. The controllers are kept in the slave subsystem and the visual output devices such as scopes kept in the console subsystem. After compilation, the complete model including all three subsystems is loaded to the Opal-RT server for converting to the equivalent ‘C’ code of the model under the test.
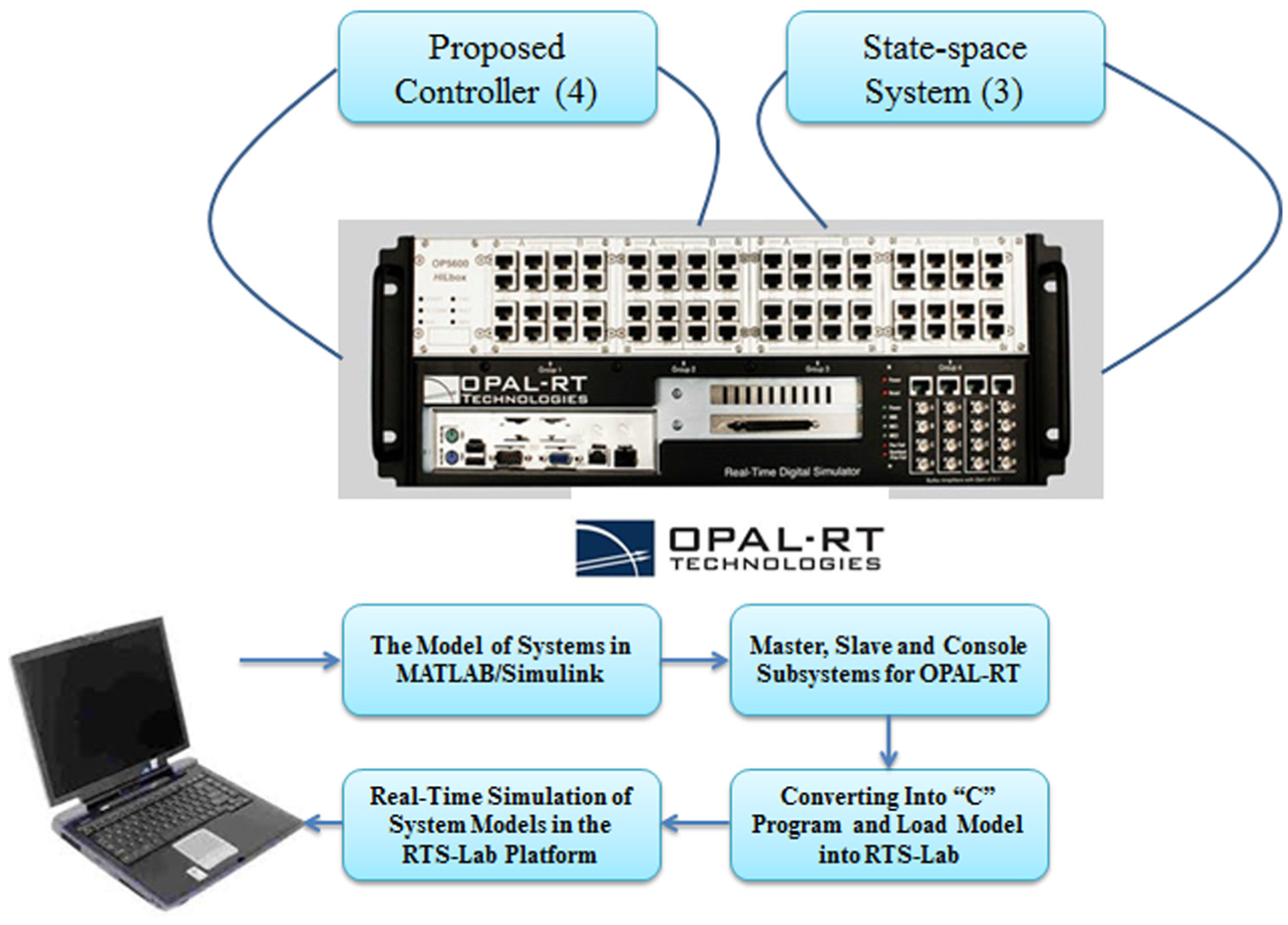
The real-time setup.

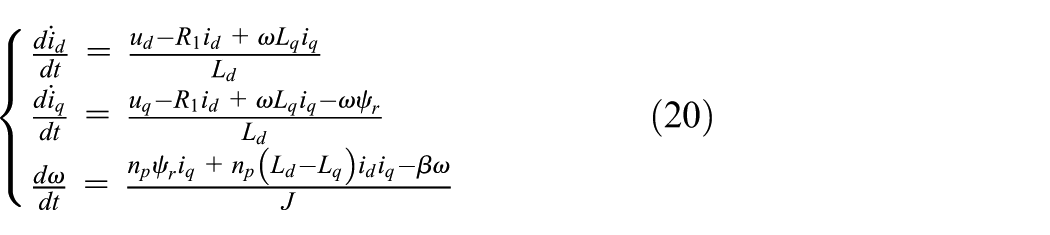
where the states

The parameters
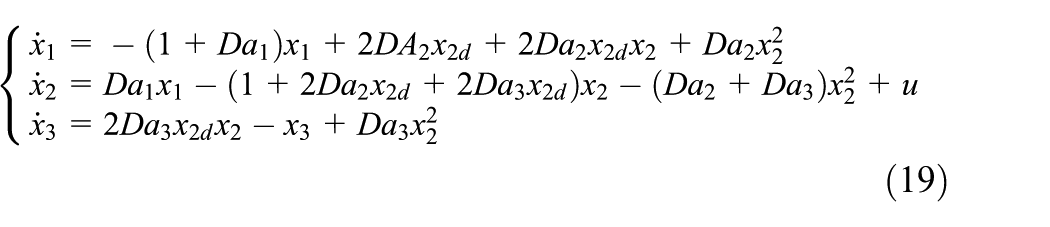
where
Simulation is done with the initial condition
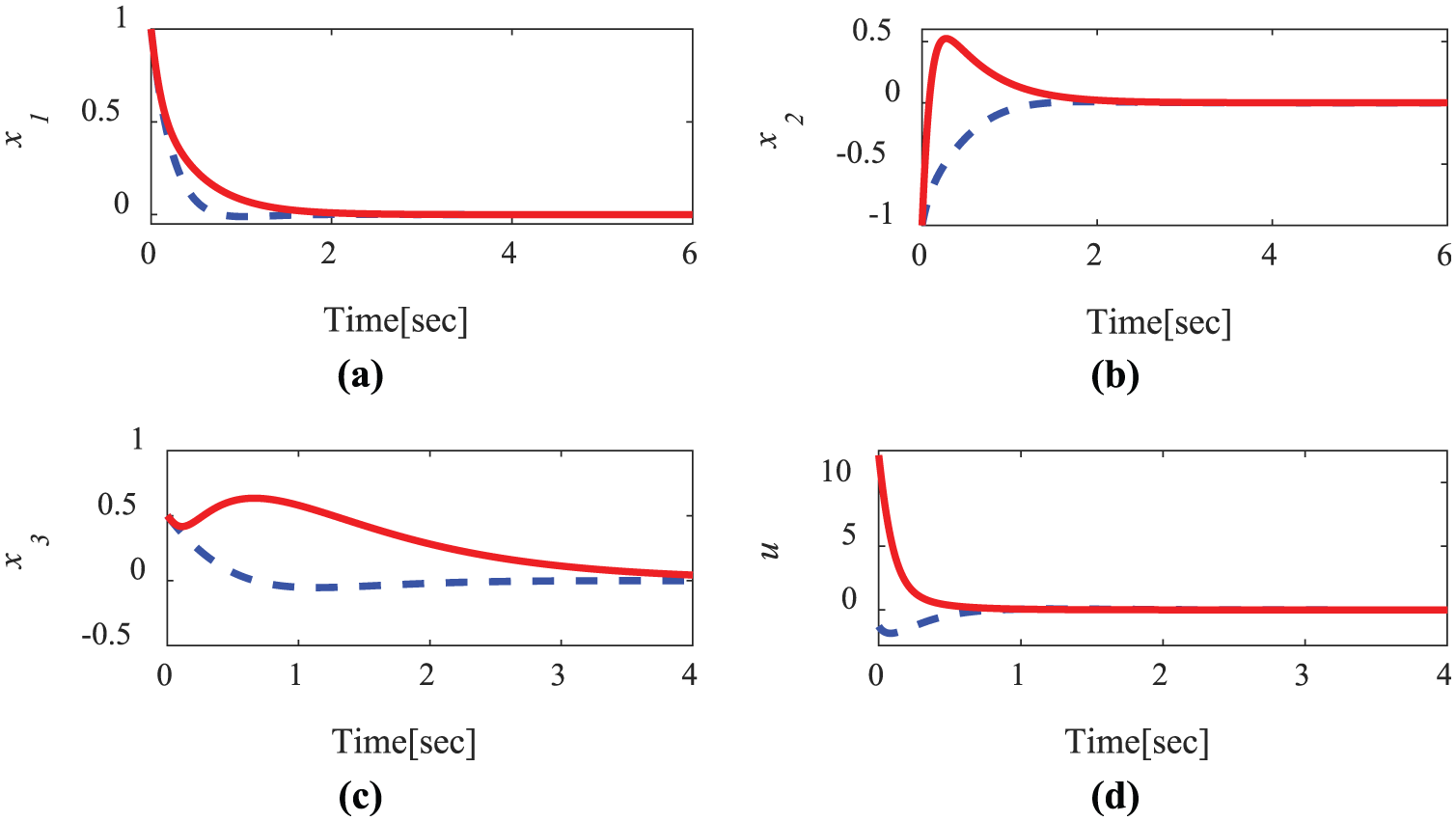
Closed-loop CSTR system (the proposed approach “blue dashed line” and Ghaffari et al. (2013)“red solid line”). (a). The state
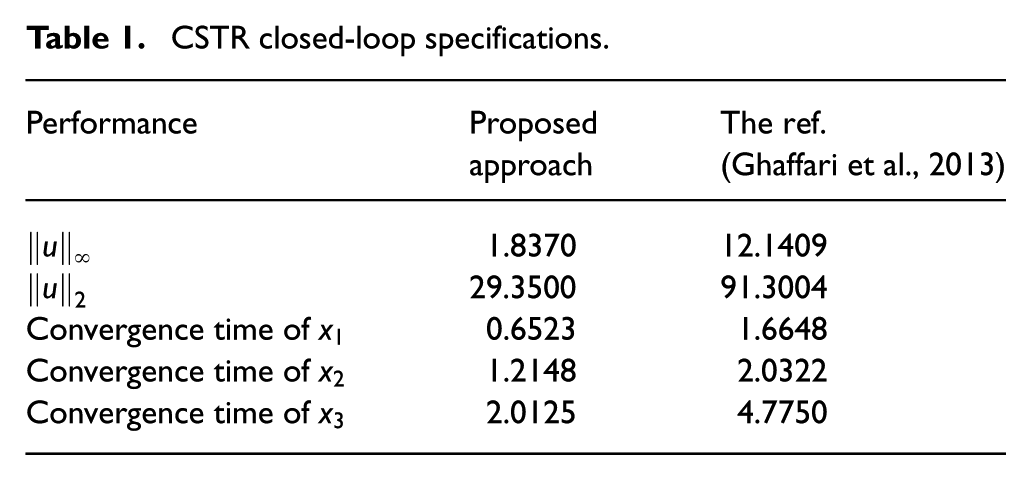
As it can be seen in Figure 4, the proposed approach provides a better performance and faster closed-loop states convergence and consumes less control signal amplitude compared with Ghaffari et al., 2013). Furthermore, the input signal norm specification and closed-loop states convergence times (2%) based on the proposed approach and Ghaffari et al. (2013) are given in Table 1.
CSTR closed-loop specifications.

where

In this simulation, we choose
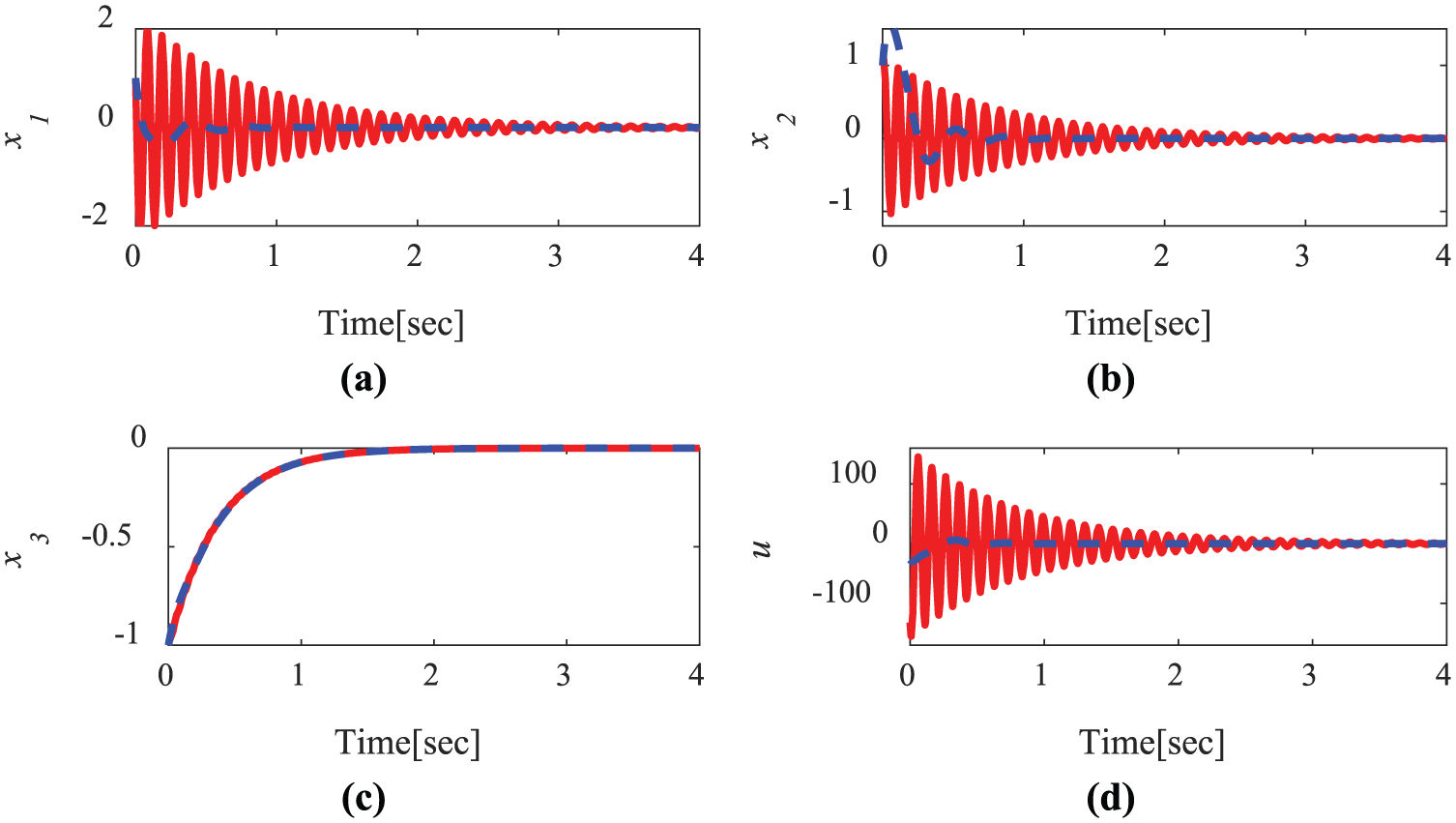
Closed-loop Lorenz system (the proposed approach “blue dashed line” and Tanaka (2001)“red solid line”). (a). The state
As shown in Figure 5, the control signal based on the proposed method has acceptable characteristics. Compared with the similar researches that are using SOS with different approaches like the one in Papachristodoulou and Prajna (2005), the states are stabilized more quickly and the control signal has better norm quantities. Moreover, the system is stabilized using the Lyapunov function with a less degree of complexity. Figure 5 reveals that the close-loop state evolutions and the control signal of Tanaka (2001) experience highly oscillatory behaviors thay deteriorate the performance of Tanaka (2001). This deficiency comes from the concept of the TS fuzzy model that defines a local convex region for the polynomial plant and the fuzzy controller is designed based on the vertices of the convex region. However, the proposed method uses the original polynomial system and fully exploits the polynomial terms to design a polynomial controller. This fact improves the performance of the proposed controller over the TS fuzzy based techniques for the polynomial plants.
where
In this example, the effect of selecting the degrees of states for the matrices P and K is studied. The feedback gains of the controller (6) are derived for the degrees 2, 4 and 6 of states, and provided in Appendix C. The initial condition is assumed to be
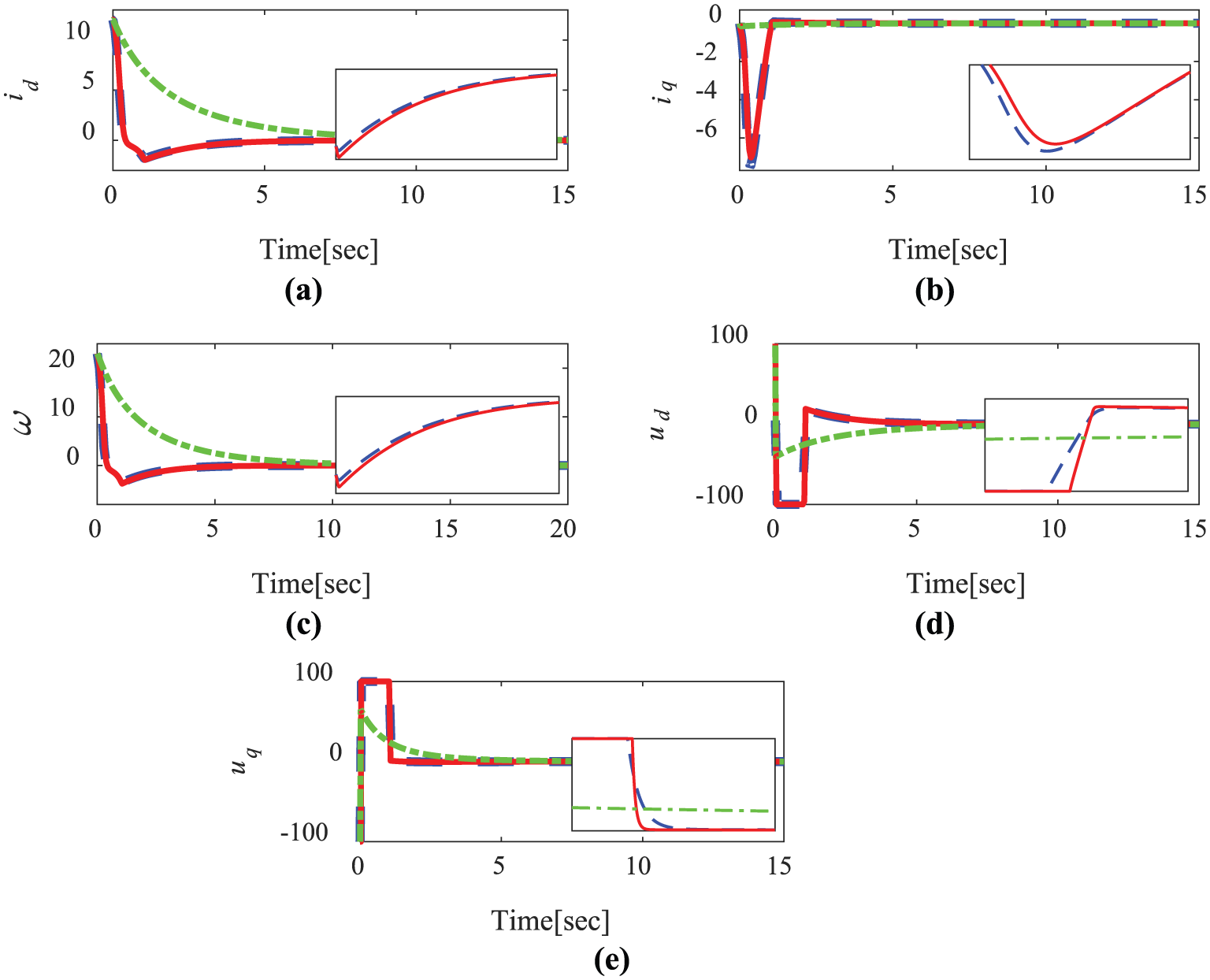
Closed-loop PMSM system (degree 6 “blue dashed line”, degree 4 “red solid line”, and degree 2 “green dot dashed line”). (a). The state
As it can be seen in Figure 6, all of the controllers with saturation constraint can effectively stabilize the PMSM plant. However, by selecting higher degree for the states of the matrices P and K, the obtained control input experiences the saturation more. The reason is that the matrices P and K comprises higher degrees of states and higher amplitude control signal is achieved. However, the closed-loop PMSM system based on the degree 2 of states, does not reach the saturation limits. Furthermore, the convergence speed of-the PMSM closed-loop system, associated with higher degree of states, is faster than those of smaller degree of states.

where

The goal of this example is to show that the stability of the polynomial systems can be also guaranteed by non-polynomial matrices P and/or K. We set
The open-loop trajectory of the Rossler system is extremely unstable; however, using the proposed approach, it becomes asymptotically stable. The simulation is done for the initial states of
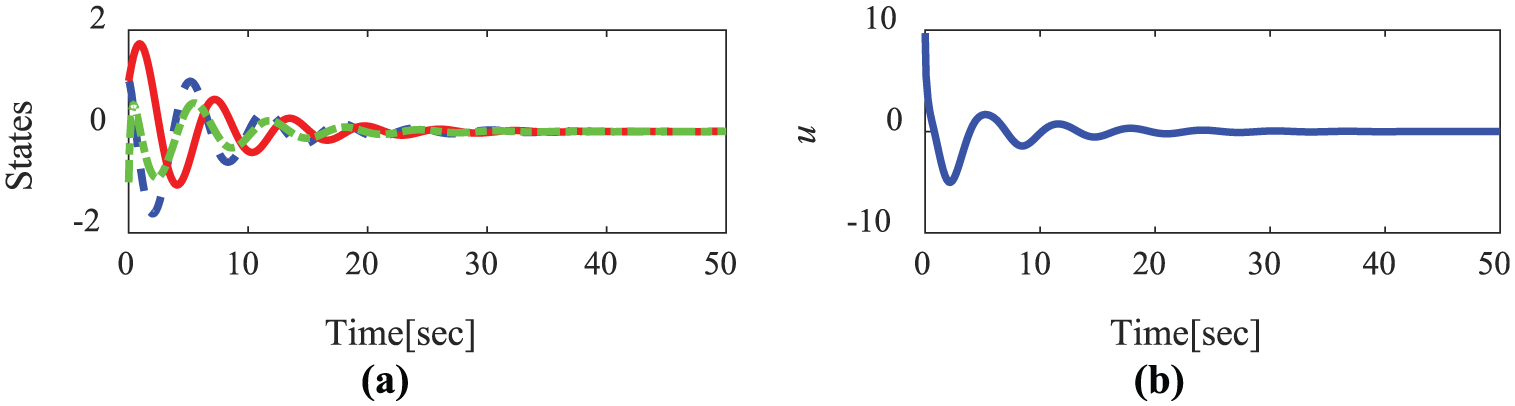
Closed-loop Rossler Chaotic system. (a). The states
Conclusions
In this paper, a polynomial state feedback control design for polynomial systems is proposed. The constraints for stability and the performance of the system are translated in terms of the polynomial matrix inequalities. A non-iterative approach based on the SOS decomposition is presented to solve the polynomial matrix inequalities and convert the non-convex problem to the convex one while reducing the conservativeness. We illustrated that through the suitable selection of the polynomial degrees, we can have a tradeoff between simplicity of the controller and the computational cost of the design. To show the effectiveness and applicability of the proposed approach, different classes of the systems including the chaotic systems, power plant, and chemical process were provided. Simulation results illustrated that the presented approach has superiorities over the other numerical-based methods in reducing the control effort and the closed-loop oscillation behavior. There are some ideas that can be followed in future; the extension to the H∞ problem, robust and/or guaranteed cost controller design, and delayed polynomial systems can be good research areas for this methodology. Furthermore, the proposed method can be further optimized using generalized Eigenvalue problem (GEVP) to find the maximum bound that we set in the theorem for the time derivative of the Lyapunov function. In addition, deriving the sufficient conditions to guarantee the boundedness of the Lyapunov matrix time derivatives and compute the local stability region are of great importance.
Footnotes
Appendix A
The CSTR plant of example 1 is stabilized via the following proposed controller
where the feedback gains are partitioned as
with
Also, the controller designed in Ghaffari et al. (2013) is as follows
Appendix B
The Lorenz system of example 2 is stabilized via the following proposed controller
where the feedback gains are partitioned as
with
Also, the controller designed in Tanaka (2001) is as follows
with
Appendix C
The PMSM plant of example 3 is stabilized via the following proposed controller
where
However, for brevity, only the controller characteristics for the degree 2 of states are provided below
Appendix D
The Rossler system of example 4 is stabilized via the following proposed controller
where
with
The dimensions and number of equations in the resulting semi-definite programing (SDP) and the computation time of each example are given in Table 2. The computational time is obtained through numerical simulations in Matlab 2012a environment in a computer with 5-core CPU processor.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.