
Abstract
This paper describes control issues of a general-class, single-input, unknown, nonlinear, non-affine system using dynamic sliding-mode control (DSMC). Chattering can be removed in DSMC with an integrator as a low-pass filter, placed before the input control signal of the plant. As a result, the augmented system (which contains the integrator) in DSMC has one more dimension than the actual system. Then the plant model must be completely known. To overcome this problem and to identify the plant model, an adaptive radial basis-function neural network has been employed and a robust procedure developed to train the parameters of a neural network based on Lyapunov theory. A smooth controller has been developed and some numerical simulations have been performed to verify the validity of the proposed approach. Two nonlinear systems were used for simulation: a Duffing–Holmes chaotic system and a switch reluctance motor. The advantage of the presented approach is that the system model can be considered unknown and can be in non-affine form.
Introduction
In the literature, sliding-mode control has been utilized as a powerful technique because of its invariance property in facing matched structured or unstructured uncertainties and disturbances that cause challenges in the realization of any proposed control law for real systems (Perruquetti and Barbot, 2002; Slotine and Li, 1991; Young et al., 1996). Invariance means insensitivity to parameter variations (Moghaddam et al., 2011) and is somewhat stronger than robustness (Perruquetti and Barbot, 2002). Chattering is the greatest disadvantage of sliding-mode control (Boiko et al., 2005; Lee and Utkin, 2007).
To solve this problem and remove chattering, five methodologies have been proposed. These are the boundary layer (Slotine and Li, 1991; Young et al., 1996), the adaptive boundary layer (Perruquetti and Barbot, 2002; Slotine and Li, 1991; Young et al., 1996), higher-order sliding-mode control (Bartolini et al., 1998; Levant, 1993, 2003, 2005), dynamic sliding-mode control (DSMC) (Chen et al., 2007; Karami-Mollaee et al., 2011) and an intelligent approach (Kaynak et al., 2001). The invariance property of slidingmode control could not be preserved in the boundary layer and adaptive boundary layer approaches (Chen et al., 2002). Higher-order sliding-mode control is proposed to reliably prevent chattering (Cavallo and Natale, 2003; Laghrouche et al., 2007). In higher-order sliding-mode control, the effect of switching can be completely removed by moving the switching task to the higher-order derivatives of the desired output (Moghaddam et al., 2011). Many algorithms have been proposed for the implementation of second- or higher-order sliding-mode control (Bartolini et al., 1998). However, calculation of the higher-order derivative of the plant model is the main drawback of these designed control laws (Bartolini et al., 1998; Cavallo and Natale, 2003; Laghrouche et al., 2007; Levant, 1993, 2003, 2005). It is well-known that when the relative degree is two, the plant model derivative must usually be known using some observers, for instance the sliding differentiator utilized by Levant (1998). In DSMC, an integrator (or any other strictly low-pass filter) would be inserted before the input control signal of the plant. In this way, switching would be removed from the input control signal, since the integrator filters the high frequencies, owing to the use of the signum function in sliding-mode control (Slotine and Li, 1991). However, to control the augmented system in DSMC, the plant model must be completely known, because the augmented system has one more dimension than the actual system (Karami-Mollaee et al., 2011). Therefore, in DSMC, the plant model is needed but in higher-order sliding-mode control the derivatives of the plant model must be known; this is the main advantage of the DSMC approach, compared with the higher-order sliding-mode control approach. For example, Chen et al. (2007) proposed a two-dimensional loop transfer recovery observer to estimate the uncertainty in the DSMC. In this work, Chen et al. (2007) assumed that the disturbance and its derivative were bounded, but this limited their work. To overcome this problem, Karami-Mollaee et al. (2011) introduced a new method based on DSMC using neural networks, based on the definition of a complicated sliding surface.
More recently, considerable effort has been made to solve the problem of chattering in sliding-mode control using an intelligent approach (Amer et al., 2011; Bouzeriba et al., 2016; Hao et al., 2016; Kaynak et al., 2001; Sun et al., 2011; Wu et al., 2017; Xu et al., 2016; Yang and Yan, 2016; Yildiz et al., 2007). Most of these methods are devoted to affine systems (Erbatur and Kaynak, 2001; Levant, 2005; Wong et al., 2001). The intelligent methods can be placed into two categories: direct methods and indirect methods (Norgaard et al., 2000). In direct methods, these approaches are applied to the controller itself; in indirect methods, these approaches play a secondary role in the controller (Norgaard et al., 2000).
We propose the use of an adaptive-neural-network observer to solve the estimation problem of the sliding surface in DSMC. The unknown part of the sliding surface can be estimated using this observer. As a result, the sliding surface would be available. Thus, the proposed adaptive-neural-network observer is an indirect approach. The structure of the proposed observer is based on a radial basis-function neural network (RBFN). We have proposed online estimation parameters based on the RBFN to guarantee the robustness of our proposed method. The stability analysis and the validity of convergence of the proposed neural model and the controller are demonstrated using Lyapunov functions. The use of both sliding-mode and adaptive techniques make the developed control law more robust and powerful for the control of non-affine uncertain systems. Thus, the proposed neural network observer is in the indirect category.
The remainder of this paper is organized as follows. The next section provides some preliminary details and gives the background for the work and the problem formulation. After this, an adaptive-neural-network observer is presented to overcome the problem of DSMC and the design of the control variable using the sliding surface is described. Then some numerical simulations are illustrated, to verify theoretical concepts presented in the previous sections. Finally, some concluding remarks are made. Some proofs are given in an appendix.
Plant and controller formulation
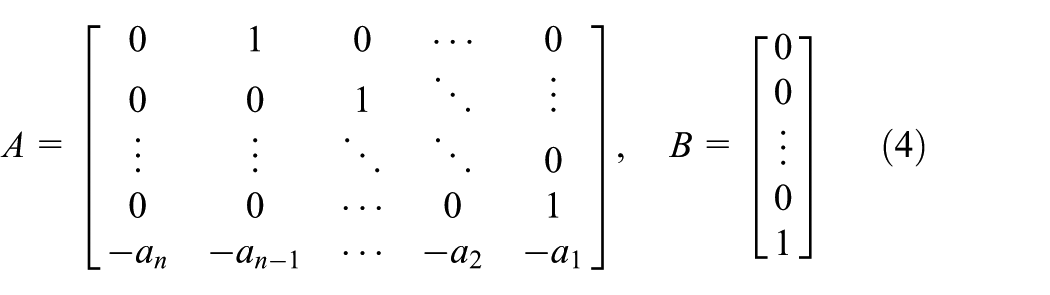
Consider a global structure of nonlinear non-affine system with state-space representation, as

where

such that

and
Assume that

Now, the objective is to utilize the DSMC to find an appropriate smooth input u such that the state vector
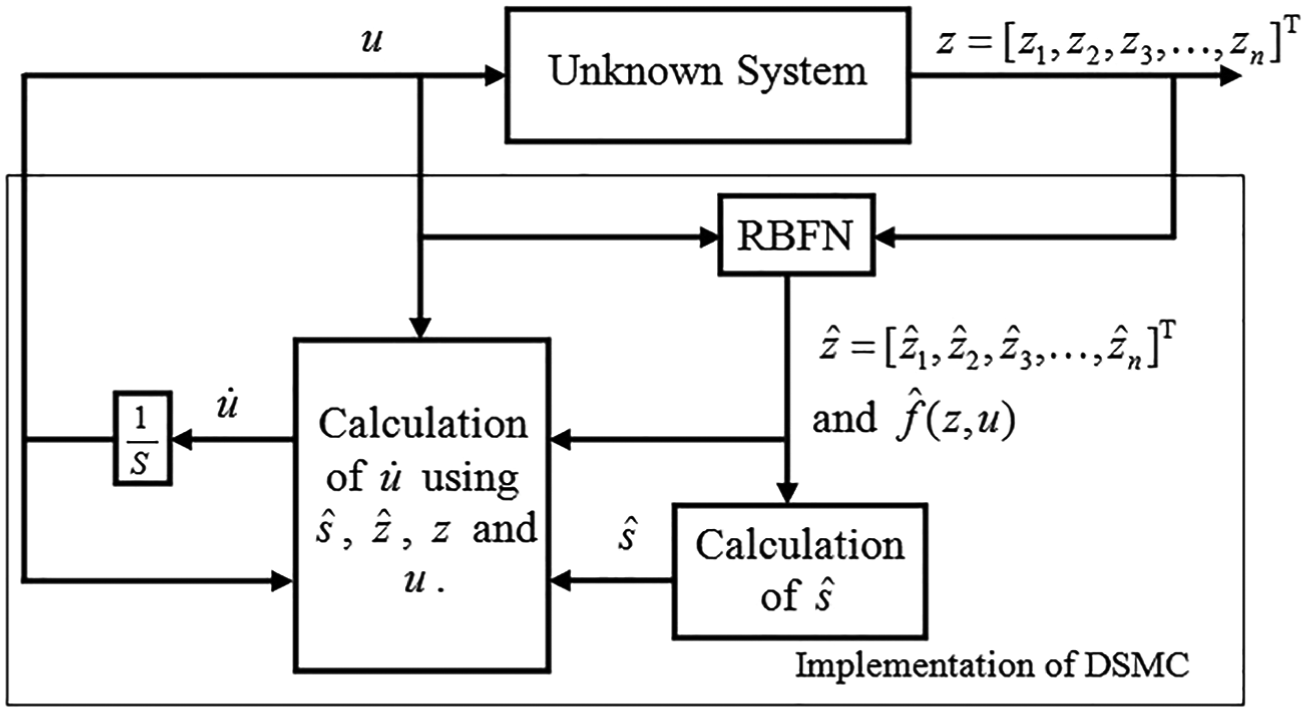
The proposed controller.
Neural observer for estimation of the plant model
According to the neural network theorems, RBFN can be approximated by any real continuous function with any arbitrary accuracy. In other words, the RBFN has a universal approximation property (Hovakimyan et al., 2002; Li, 2017; Lin and Hsu, 2004; Norgaard et al., 2000; Wang, 1997). Therefore, to estimate the nonlinear function g, a RBFN is used as follows

where

where

where

where

the estimation error

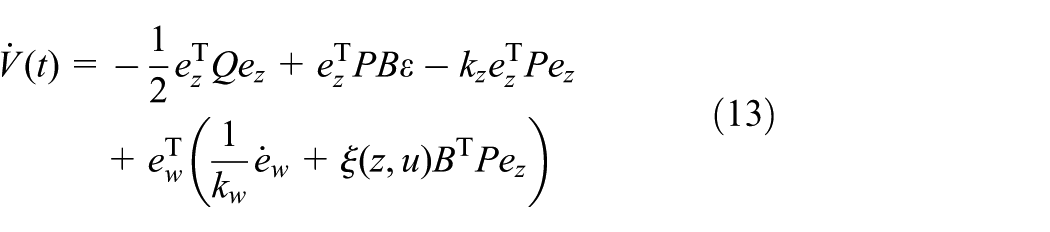
Then the time derivative of

Substituting equations (5) and (9) into equation (12), it follows that
using

Considering the properties of positive definite matrix Q and P, and using
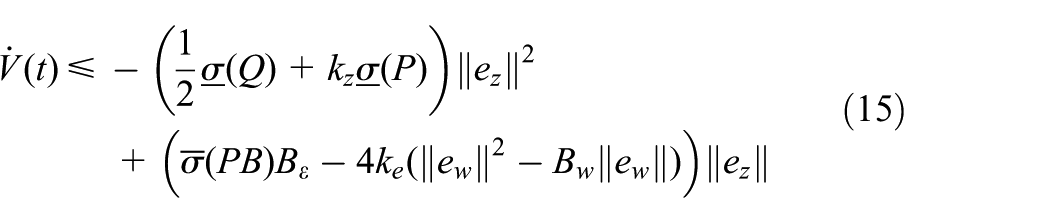
where
Now,

Therefore
or

Take

and suppose
With integration over the interval

When

Since

is greater than zero, equation (20) implies decreasing
Designing the proposed dynamic sliding-mode controller (DSMC)
The surface in conventional sliding-mode control can be defined as (Perruquetti and Barbot, 2002; Slotine and Li, 1991; Young et al., 1996)

where

where

where
Substituting equations (24) and (25) into equation (23) yields

where
Taking the derivative of equation (26), one has

where

Note that the function
whereas

and
Substituting equation (30) into this equation yields
This yields
Then one can write equation (34) as

Numerical simulations
In this section, two numerical examples are carried out by applying two different nonlinear non-affine systems to validate the effectiveness of these proposed methods. Both simulations are conducted using Matlab with a sampling time of 0.001s.
Example 1
Consider the following Duffing–Holmes chaotic system (Li et al., 2010)
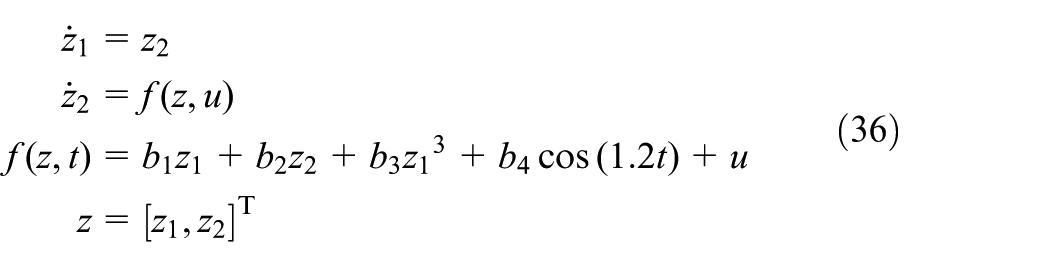
where

The initial conditions for the neural network are
(a) The chaotic behaviour of the system. (b) The bounded nonlinear system.
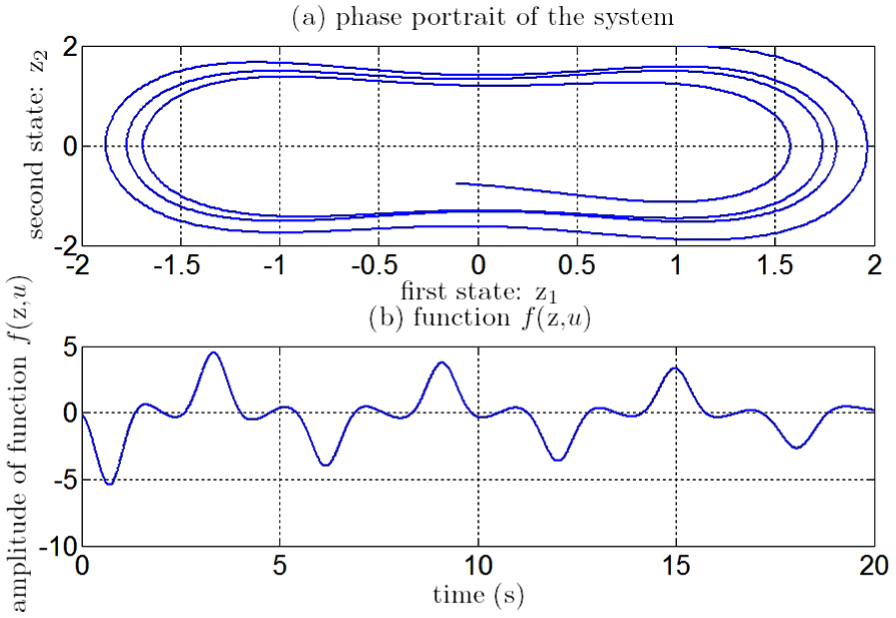
Tracking performance of first state in Duffing–Holmes chaotic system.
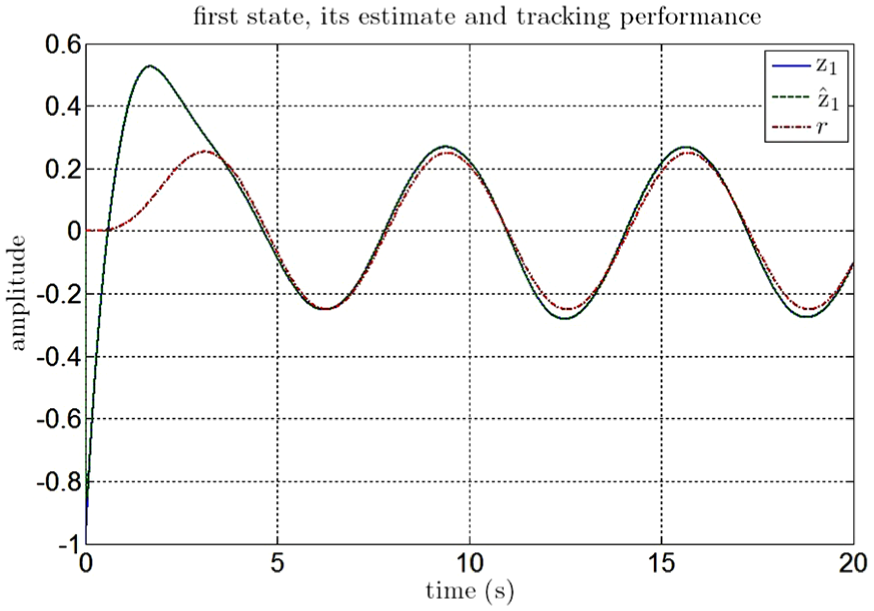
Tracking performance of second state in Duffing–Holmes chaotic system.
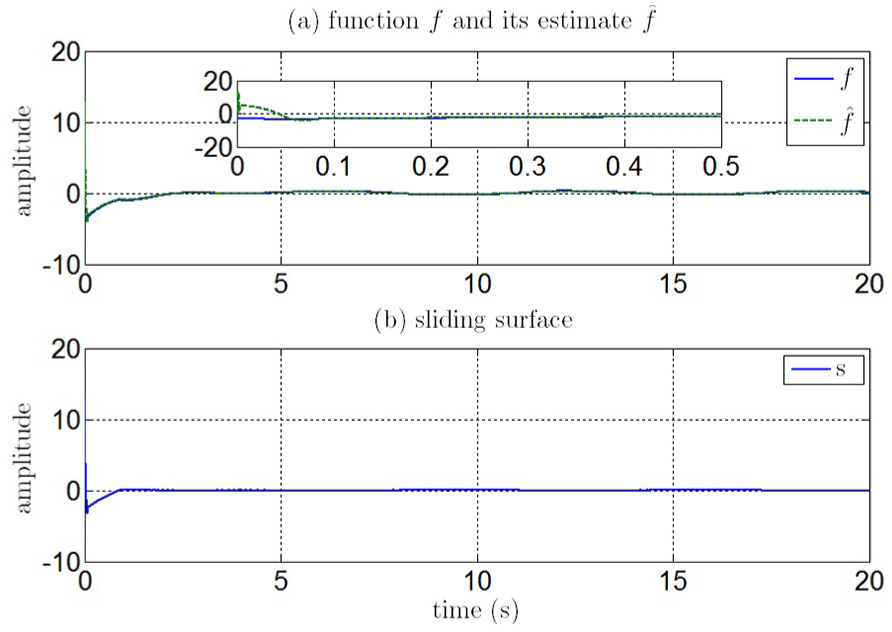
(a) Duffing–Holmes chaotic system estimation model. (b) Convergence of sliding surface to zero in finite time.
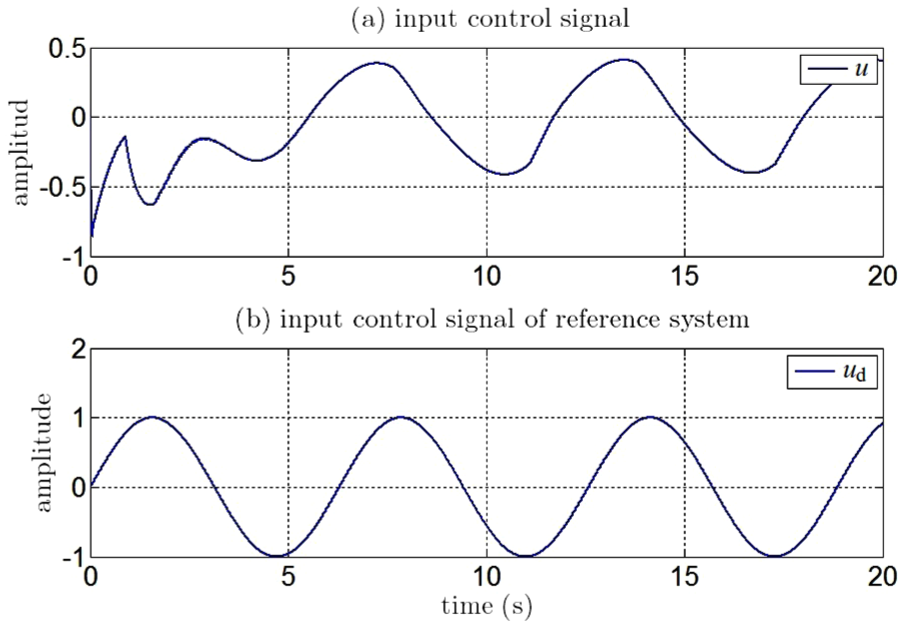
(a) Input control signal of Duffing–Holmes chaotic system. (b) Input control signal of reference system.
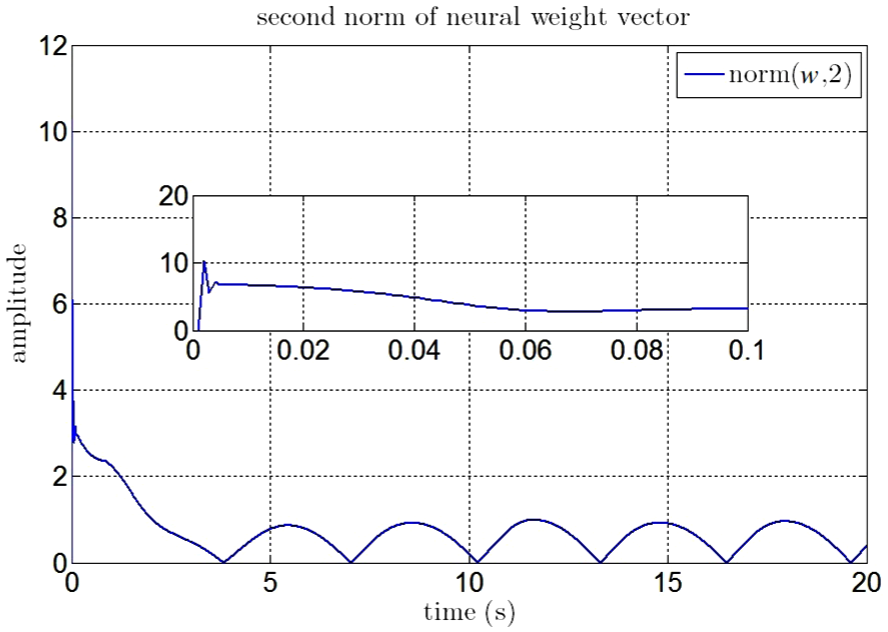
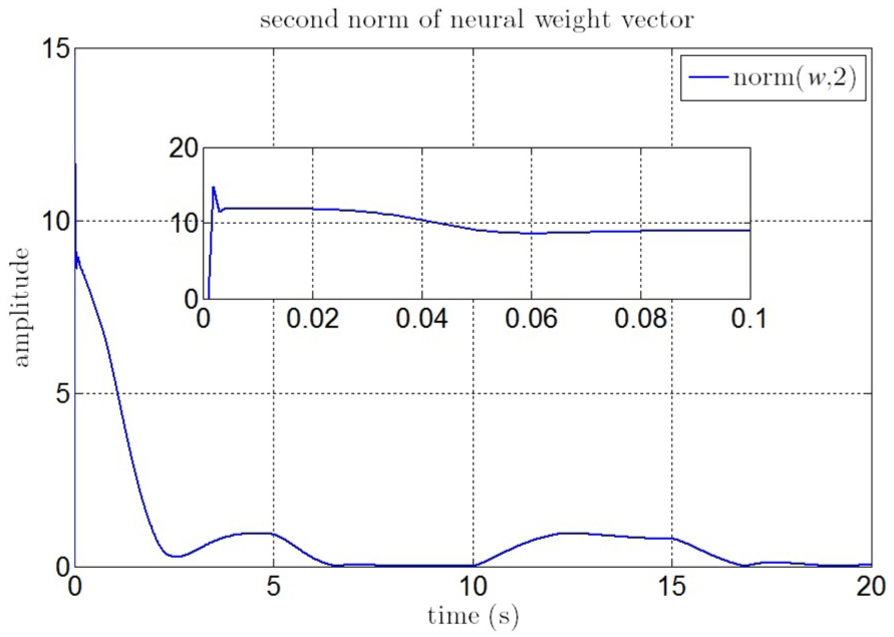
Convergence of second norm of neural network weight vectors for Duffing–Holmes chaotic system.
Figures 3 and 4 show the capability of the proposed RBFN to produce first and second estimates of the system. Moreover, as is apparent from these figures, the reference trajectory is tracked. Figure 5(a) demonstrates the simulation result of the neural network to approximate the unknown nonlinear functions. As can be seen, the output of RBFN follows the output of nonlinear function. From Figure 5(b), we can see that the convergence to the sliding surface occurs in finite time. The input control signal of the nonlinear Duffing–Holmes chaotic system is shown in Figure 6(a), which is smooth and does not show any switching. The estimation convergence of the proposed neural network weight vector is included in Figure 7 to show the performance of the proposed method.
Example 2
Assume the one-phase model of a switch reluctance motor (Xu and Tan, 2002), as
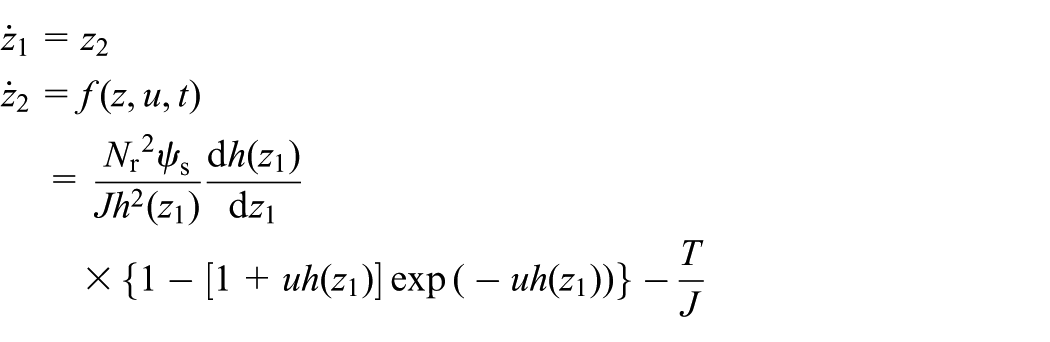

Where


Then, one has

where

Then we have
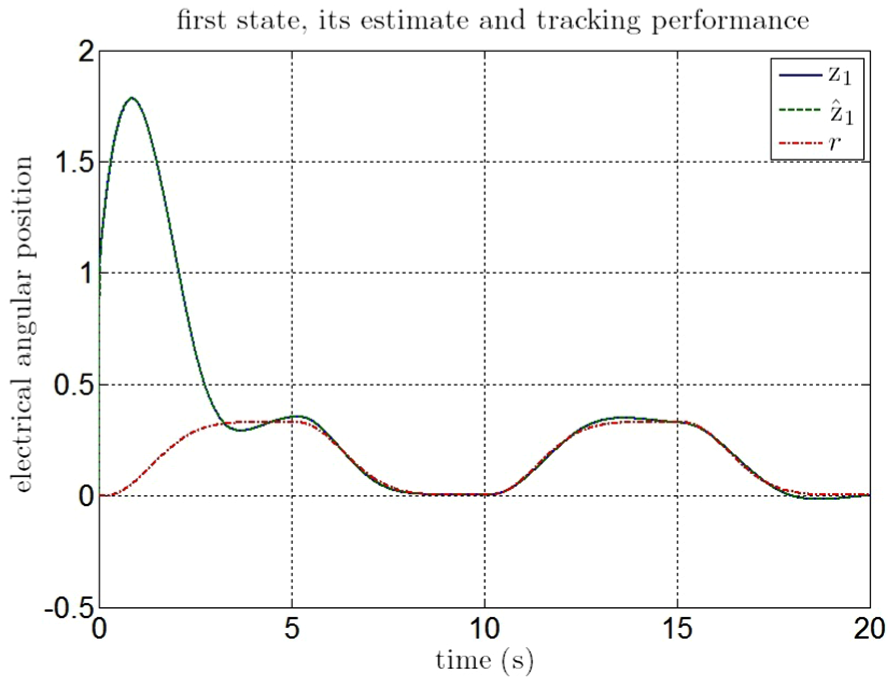
Tracking performance of first state in switch reluctance motor.
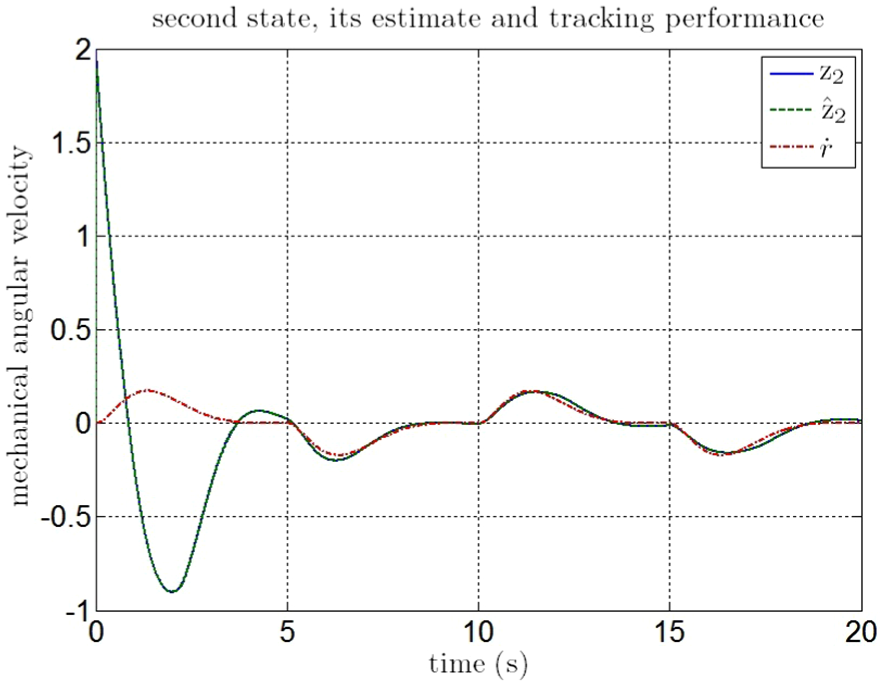
Tracking performance of second state in switch reluctance motor.
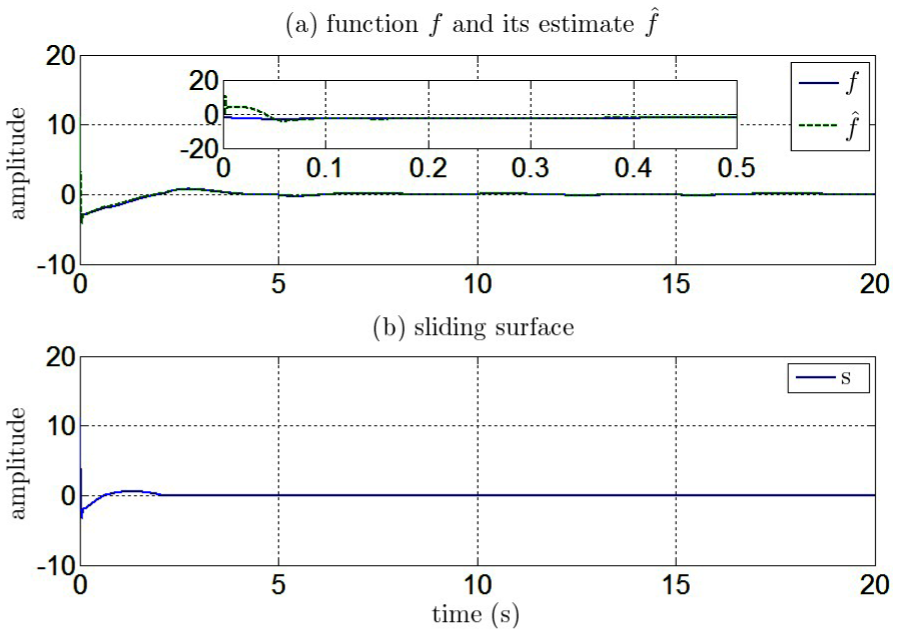
(a) Switch reluctance motor estimation model. (b) Convergence of sliding surface to zero in finite time.
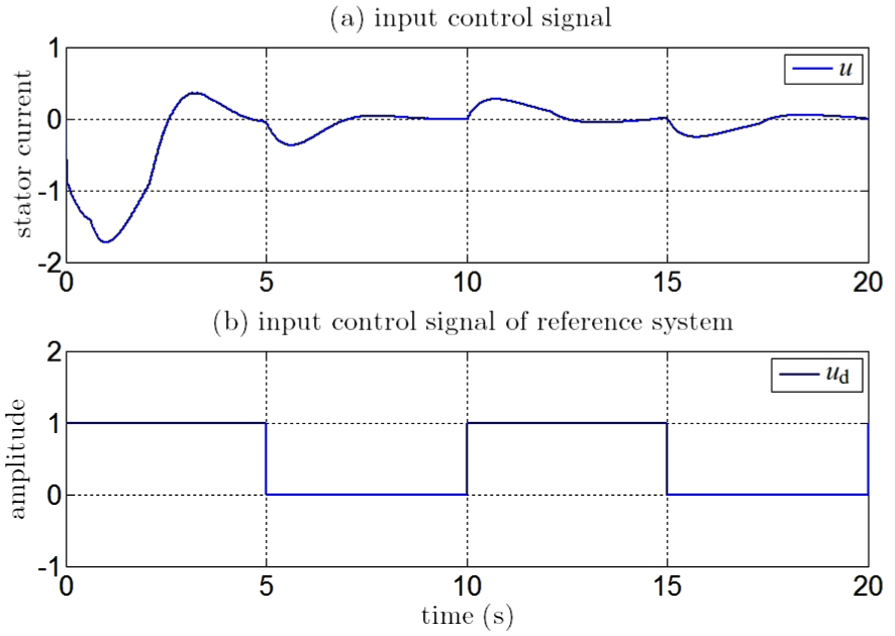
(a) Input control signal of switch reluctance motor. (b) Input control signal of reference system.
Convergence of second norm of neural network weight vectors for switch reluctance motor.
The results of these two simulations illustrate good transient performance; the tracking error is small with all signals in the closed loop system being bounded.
Conclusion
In this study, a robust adaptive DSMC is developed for tracking control of a dynamic, non-affine, nonlinear, unknown system using RBFNs. By using a robust adaptation law, a model is obtained for the unknown nonlinear function of the plant. By adding the nth-order derivative term of the error to the sliding surface, it is possible to incorporate the approximate information of the plant (i.e., the plant neural model) in deriving the nonlinear adaptive controller. Moreover, the tracking error vector was driven to the sliding manifold with a smooth control effort. This method does not require any off-line training phase for the neural network. The developed control structure has fast convergence and removes the chattering problem without degrading the tracking performance. To verify the effectiveness of the approach, two nonlinear examples are given; a Duffing–Holmes chaotic system and a switch reluctance motor.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.