
Abstract
In this paper, a consensus problem is addressed for first-order multi-agent systems with unknown nonlinear dynamics under undirected graphs. Adaptive fuzzy wavelet networks are used to design two novel control algorithms for nonlinear systems without delays and nonlinear systems with state time delays. In these algorithms, adaptive fuzzy wavelet networks are employed to compensate for nonlinear dynamics of systems. Using proper Lyapunov functions, adaptive laws are obtained and the uniform ultimately bounded stability of closed-loop systems is proved. In addition, this paper uses Lyapunov–Krasovskii functions to handle unknown time delays. Three simulation examples are provided to illustrate the effectiveness of the proposed control schemes.
Introduction
In recent years, many researchers have developed distributed consensus algorithms for multi-agent systems (Olfati-Saber and Murray, 2004; Ren, 2008; Ren et al., 2005; Semsar-Kazerooni and Khorasani, 2009); this significant interest is due to multi-agent systems’ broad range of applications in different areas, such as transportation, sensor networks, unmanned air vehicles, robotics and underwater vehicles (Yu et al., 2009). Consensus in multi-agent systems is defined as the arrival of all agents of a group at a common agreement, using a local distributed protocol (Meng et al., 2011). Distributed controllers have many advantages, such as less system requirement, low operational cost, high level of adaptivity, strong robustness and scalability (Cao et al., 2013; Chen and Song, 2014).
Many remarkable achievements have been acquired regarding the consensus control problem of linear multi-agent systems (Olfati-Saber and Murray, 2004; Ren, 2008; Semsar-Kazerooni and Khorasani, 2009). Olfati-Saber and Murray (2004) studied three different cases of first-order multi-agent systems, including systems with directed networks and fixed topology, systems with directed networks and switching topology and systems with undirected networks and fixed topology, considering communication time delays. Ren (2008) analysed four algorithms for the consensus problem of second-order multi-agent systems, which include systems with a bounded control input, without velocity measurement, with a leader whose information is available to all members, and with a leader whose states are available to a subset of members while the control input is bounded. A game theoretic scheme was suggested by Semsar-Kazerooni and Khorasani (2009) for achieving consensus over a common value for a group of agents with general linear dynamics.
However, to reduce the gap between theoretical models of systems and their real-world dynamics, most recent studies propose and investigate control strategies for multi-agent systems with nonlinear dynamics (Fan et al., 2014; Mei et al., 2013; Wen et al., 2014; Yu et al., 2010). Various methods, such as neural networks and adaptive control, have been used to handle unknown nonlinear dynamics of multi-agent systems to reach consensus (Chen and Song, 2014; Chen et al., 2014; Hou et al., 2009; Yu et al., 2013). Hou et al. (2009) proposed an adaptive neural-network-based control approach to solve consensus problems of first-order multi-agent systems with nonlinear dynamics; this approach was then extended to address consensus problem of higher-order systems. Yu et al. (2013) considered leaderless and leader-following cases and suggested two adaptive strategies for tuning controllers’ gains of nonlinear second-order multi-agent systems. Neural networks were used by Chen and Song (2014) to compensate for nonlinear dynamics and to reach consensus in second-order multi-agent systems with dynamic leaders and under directed graphs.
Further developments in multi-agent systems and the need for mathematical models of systems that are close to real-world applications have led researchers to consider different kinds of time delay (Chen et al., 2014; Lin and Jia, 2009, 2010; Liu et al., 2013; Meng et al., 2011; Sun and Wang, 2009). Generally speaking, there are three types of time delay in multi-agent systems: communication delay, which causes a latency in information exchange between agents; input delay, which affects the control input of systems; and state time delay, which results from the inertia that exists in the dynamics of systems (Chen et al., 2014; Meng et al., 2011; Olfati-Saber and Murray, 2004).
In this study, owing to the complexity of nonlinear systems, only state time delay is considered. The appearance of state time delay in the dynamics of almost all practical systems is an inevitable problem; therefore, it is of paramount importance to address this problem in multi-agent systems. Several notable schemes have been proposed to overcome the consensus problem of time-delayed linear multi-agent systems (Lin and Jia, 2009, 2010; Meng et al., 2011; Sun and Wang, 2009). Meng et al. (2011) studied both first- and second-order linear systems under directed networks with communication and input time delays and proper controllers, suggested to cope with the consensus problem under some conditions. Lin and Jia (2010) used linear matrix inequalities to derive sufficient conditions to reach average consensus in linear second-order multi-agent systems with time delays and jointly connected network topologies. Lin and Jia (2009) studied second-order discrete time systems with communication time delays under changing topologies and derived sufficient conditions for reaching consensus using a proposed control algorithm. However, the complexity of nonlinear multi-agent systems prevents us from directly applying control strategies of linear multi-agent systems to nonlinear ones. Chen et al. (2014) used adaptive radial basis function neural networks (RBFNNs) to compensate for nonlinear dynamics of a class of first-order nonlinear multi-agent systems and a proper Lyapunov–Krasovskii function employed to handle unknown state time delays of the system. However, applying this method leads designers to select a large control gain, which is not desired. The consensus problem of second-order nonlinear multi-agent systems with time-varying delays was investigated by Liu et al. (2013) and an adaptive strategy was proposed for tuning coupling strengths and feedback gains of the controller. However, in this work, time delays should be in linear form. A control algorithm based on adaptive fuzzy wavelet networks (AFWNs) was proposed by Taheri et al. (2017) for the consensus control problem of second-order nonlinear multi-agent systems with state time delays but, because of the differences between first- and second-order systems, the proposed algorithms in that work cannot directly be applied to first-order systems and a compatible form of AFWNs should be developed.
Many different methods have been studied for approximating nonlinear dynamics of a system, such as fuzzy logic, adaptive fuzzy approach, neural networks and wavelet networks. Combination of adaptive theory, neural networks, fuzzy logic and wavelet theory results in the appearance of AFWNs. These combine the advantages of different methods, which give them some special properties, such as multiresolution capability. This multiresolution property is useful because at a coarse resolution, wavelets can easily approximate global (low-frequency) behaviour and at a fine resolution, they can approximate local (high-frequency) behaviour of the approximated function (Ho et al., 2001b; Zekri et al., 2008). Fuzzy wavelet networks, which form the structure of AFWNs, can have a fast convergence with a small number of fuzzy rules; in comparison, neural networks need a large number of neurons and may still stick in local minima (Abiyev and Kaynak, 2008). Because of several essential properties of AFWNs, such as approximating an extensive range of nonlinear systems, fast learning ability, multiresolution capability and desired accuracy, they have been used widely in designing nonlinear control systems (Ho et al., 2001a; Lin, 2006; Shahriari-kahkeshi and Sheikholeslam, 2014; Zekri et al., 2008). Nonetheless, AFWNs have not been applied to control first-order nonlinear multi-agent systems.
This study aims to develop two control strategies to address the consensus problem of first-order nonlinear multi-agent systems with or without state time delays and proposes novel approaches based on AFWNs. In the first approach, a new consensus algorithm is provided to reach a consensus in first-order nonlinear multi-agent systems without time delays; this approach is then improved to guarantee arrival at consensus in systems with state time delays. The proposed algorithms attempt to tackle two problems: first, the problem of nonlinear dynamics of systems, which is solved using AFWNs; second, the existence of unknown state time delays of systems, which are handled using an appropriate Lyapunov–Krasovskii function. The main contributions of this paper are the use of AFWNs for approximating nonlinear dynamics of first-order nonlinear multi-agent systems, and a new algorithm to solve the consensus problem of first-order nonlinear multi-agent systems with state time delays. To mention an application, the proposed control algorithms in this paper can be applied to the consensus control of a state time-delayed multi-agent system with nonlinear dynamics, such as a combination of collaborative manipulator systems that need to reach a consensus (Hou et al., 2009), in order to achieve a specific configuration and coordination, such as picking up or landing an object.
The rest of this paper is organized as follows. In the next section, some basic concepts of graph theory and first-order multi-agent systems and some necessary lemmas, definitions and typical fuzzy wavelet networks (FWNs) are introduced. The third section proposes a FWN for approximating nonlinear dynamics of an agent, then improves it to an AFWN and suggests a control approach to reach consensus in first-order nonlinear multi-agent systems. The proposed control approach is proved in Theorem 1. A consensus control algorithm for first-order nonlinear multi-agent systems with state time delays is presented and its stability is proved in Theorem 2, in the fourth section. Two simulation examples in the fifth section illustrate the efficiency of proposed control strategies. Finally, the last section provides conclusions for this study.
Preliminaries
In this section, some basic concepts of graph theory are mentioned for first-order multi-agent systems. Then some lemmas and assumptions are presented. Finally, the structure of FWNs is studied.
Graph theory
An undirected graph

Furthermore, for any
First-order multi-agent systems
The first-order nonlinear multi-agent systems are described as

where

where ∥.∥ denotes the two-norm (Chen et al., 2007).

If the dynamics of agents include state time delays, then the related multi-agent system can be described as

where
The following lemma, assumptions and definition are needed to obtain the main results of this paper.
FWNs
A representative FWN with N fuzzy rules can be shown in the format (Lin, 2006; Shahriari-kahkeshi and Sheikholeslam, 2014)
where

where

The output of the FWN can be shown as

Consensus protocol of first-order nonlinear systems using AFWN
In this section, a FWN is described to illustrate the method of approximating the unknown nonlinear function of the ith agent of a first-order nonlinear multi-agent system. Then a proper AFWN is derived from the mentioned FWN. Finally, a control algorithm for reaching consensus using AFWN is expressed and the stability of the closed-loop system is proved in Theorem 1.
FWN for ith agent of multi-agent system
The original FWN with N fuzzy rules for approximating unknown nonlinear functions of the ith agent of equation (1) can be described in the following format
where

where

The output of the FWN can be shown in the following format

To avoid complexity in the notation, the output of FWN is shown in the following matrix form

where the translation parameter vector is

where
The estimate of

where
Since the accuracy of estimation depends directly on weights, dilation and translation matrices and their parameters, so as to attain the favourite efficiency, it is not proper to choose FWN parameters manually. Therefore, the AFWN should be employed to adjust the parameters of the FWN under appropriate adaptive laws. Adaptive learning laws are derived from a Lyapunov direct method to adapt all parameters of the FWN.
Consensus in multi-agent systems using AFWN
In this subsection, the previous FWN is developed to an AFWN for a multi-agent system with n agents, and a proper control input is proposed to attain consensus between all agents. The proposed control input is described as

where

Let us define the consensus error as


where
To attain adaptive laws,

where

where




where
where
Using algebraic graph theory, it can easily be concluded that zero is an eigenvalue of order m in matrix

where
where
The derivative of the Lyapunov function is
By substituting equations (12) and (18) to (20) into equation (23), and using equation (17), the derivative of

For any positive constant

where
Consensus protocol of first-order nonlinear systems with state time delays
This section addresses the problem of consensus in first-order multi-agent systems with nonlinear dynamics and state time delays. All notation is according to that in the last section. The proposed control input and time-delayed multi-agent system are described in equations (26) and (27), respectively


Substituting equation (26) into equation (27), the closed-loop system can be recast as

where



where
where
The derivative of
By substituting equations (26), (29) to (31) and (17) into equation (33) and using the property
The following inequality always holds
Then

holds for any arbitrary positive constant of
Simulations
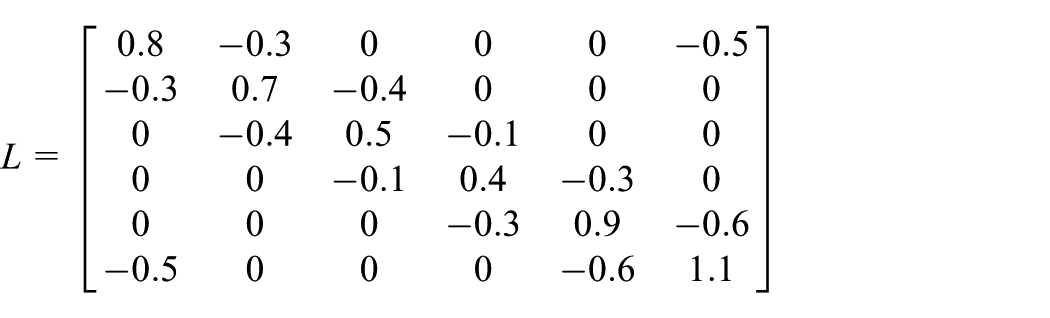
In this section, three simulation examples are presented. The first example illustrates the effectiveness of the proposed control algorithm in the consensus control of first-order nonlinear multi-agent systems, the second example investigates the capability of the control method suggested in the fourth section for controlling time-delayed systems, and the third example shows a real-world application of the proposed control algorithm given in Theorem 2; in this example, the problem of reaching consensus in velocity of six two-link manipulators is addressed. In all of the examples, the network topologies are the same and the following Laplacian matrix is used
Example 1
Consider the adaptive laws in Theorem 1 with five fuzzy rules for each agent, i.e.

The control input

where
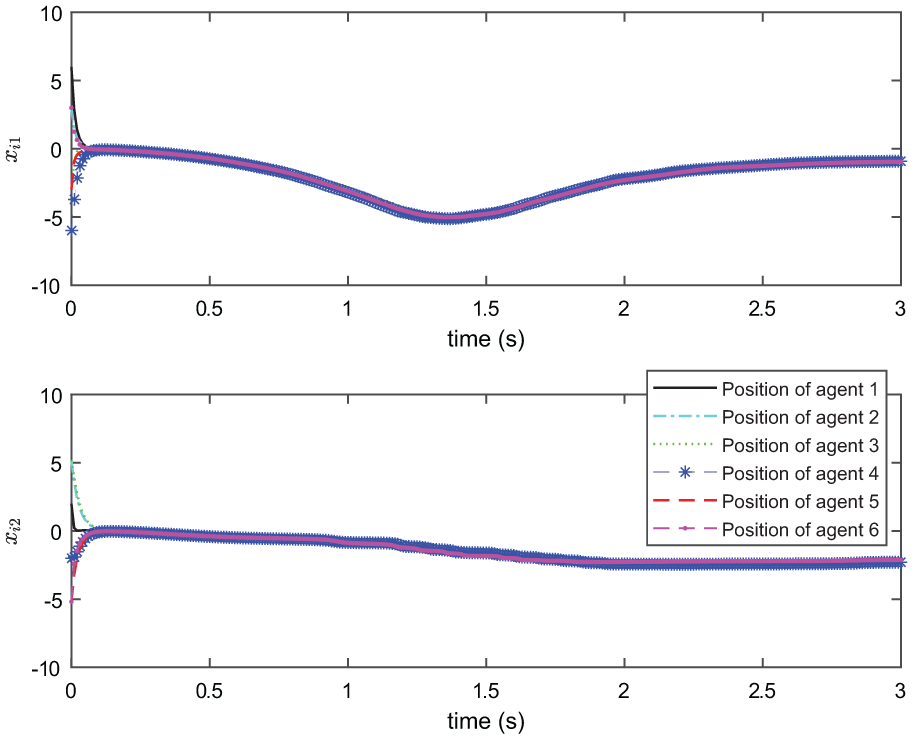
Position of agents in Example 1.
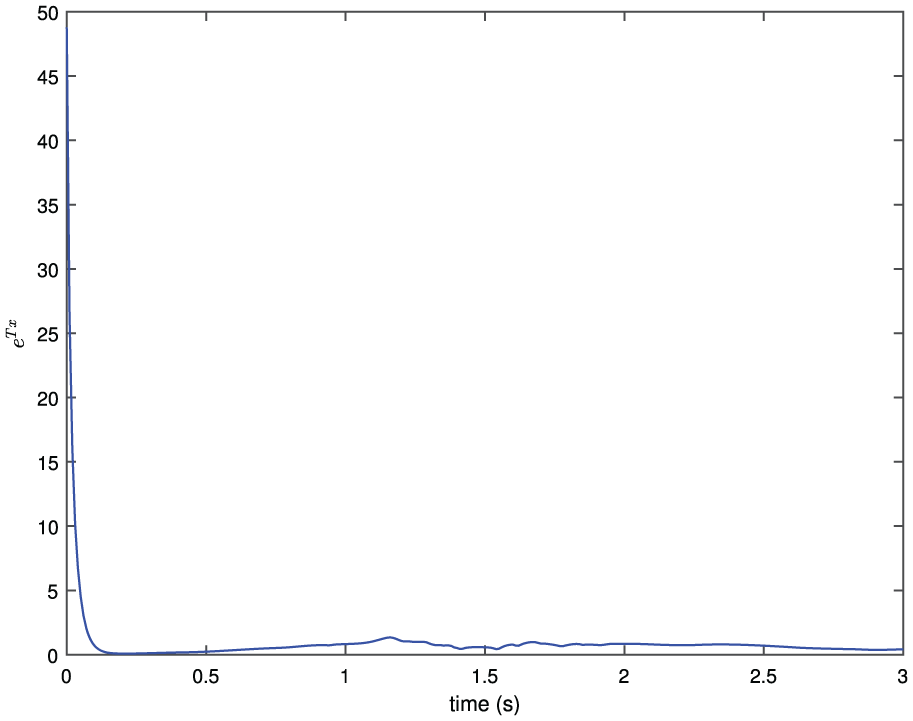
Total consensus error
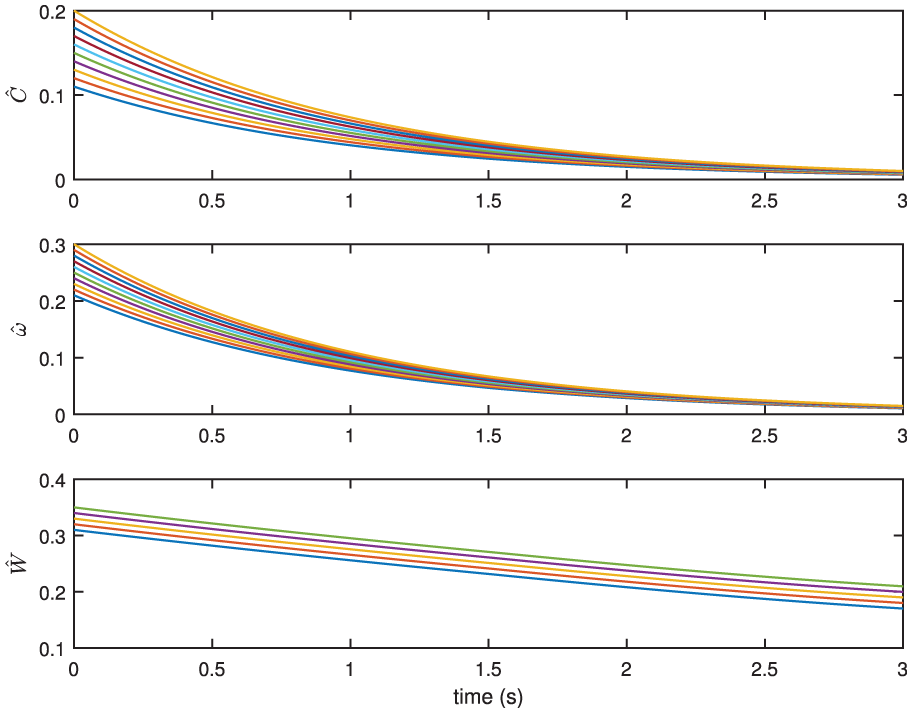
Adaptive fuzzy wavelet network parameters of agent 1 in Example 1.
As a comparison, the consensus control problem in this example is solved using adaptive RBFNNs. This method was used by Chen et al. (2014) and, with little change, we apply it to Example 1. The controller is the same as equation (12) and its parameters are equal to the parameters in Example 1, except for

where
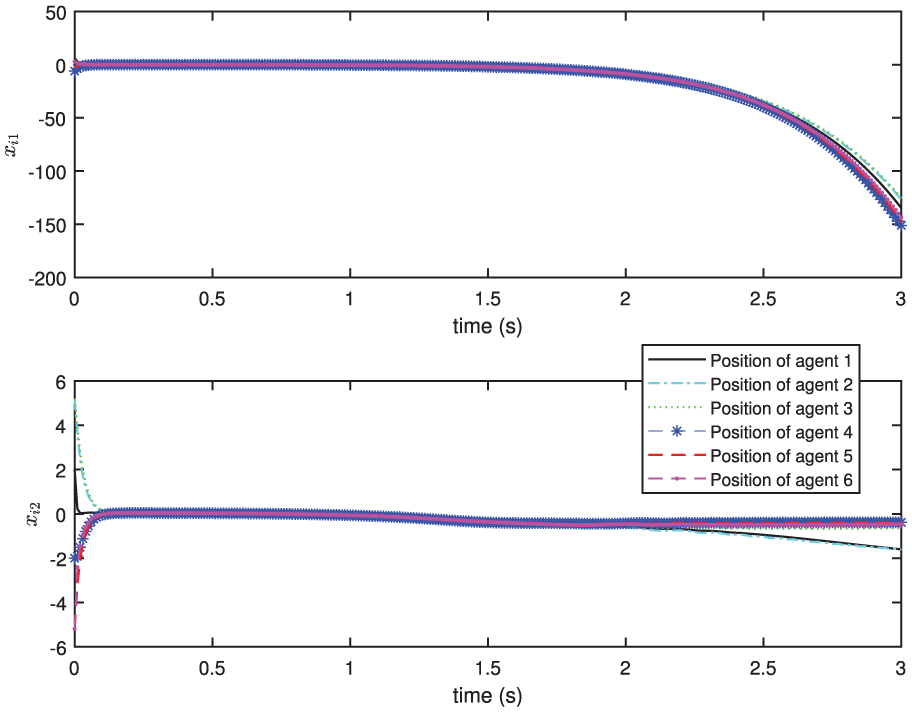
Position of agents in Example 1 using method based on adaptive radial basis function neural network.
Total consensus error
Both the proposed methods in this paper, which are based on AFWNs, and the method used for comparison, which is based on an adaptive RBFNN, have similar structures. Therefore, the computational complexities of the proposed algorithms in this paper and the adaptive RBFNN-based approach are similar. The computational complexity of our proposed method can be shown as
Example 2
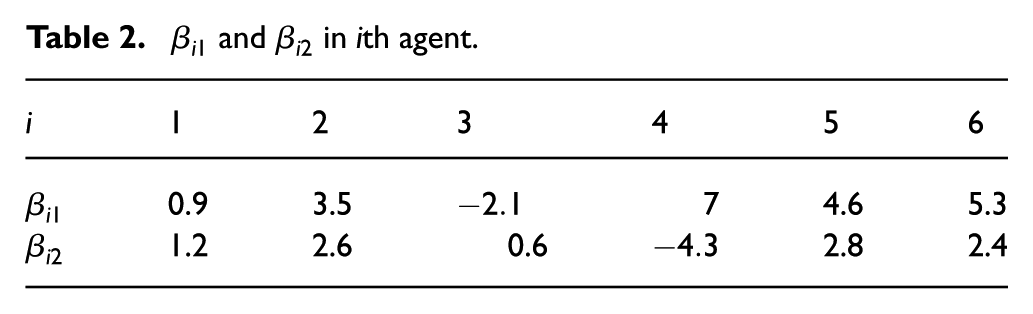
In this example, the dynamics of the agents include a state time delay. Assumptions 1 to 4 hold and the parameters of the agents are the same as in Example 1. Consider equations (27) and (26) and the adaptive laws in Theorem 2. The nonlinear functions are given as
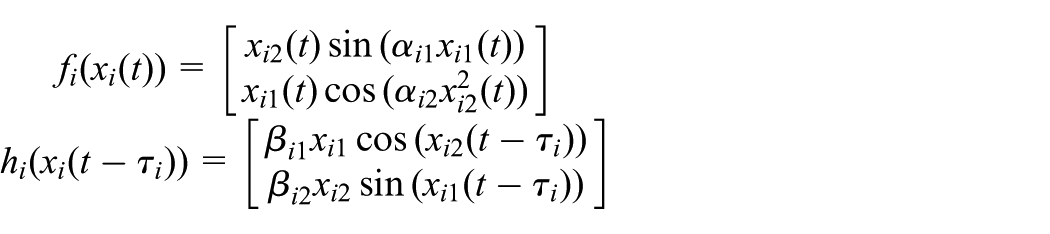
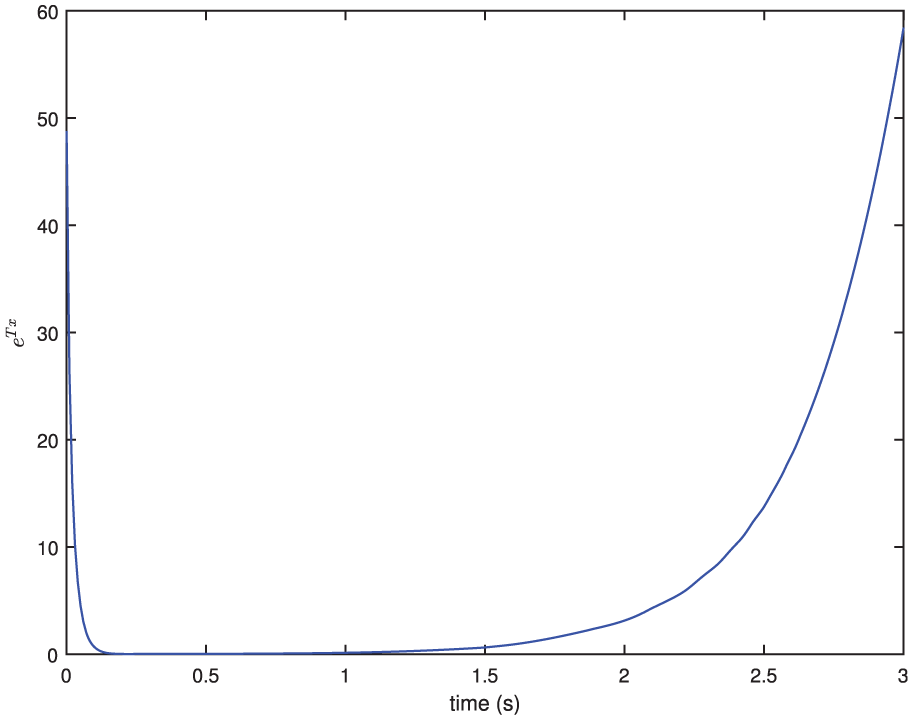
The maximum time delay is
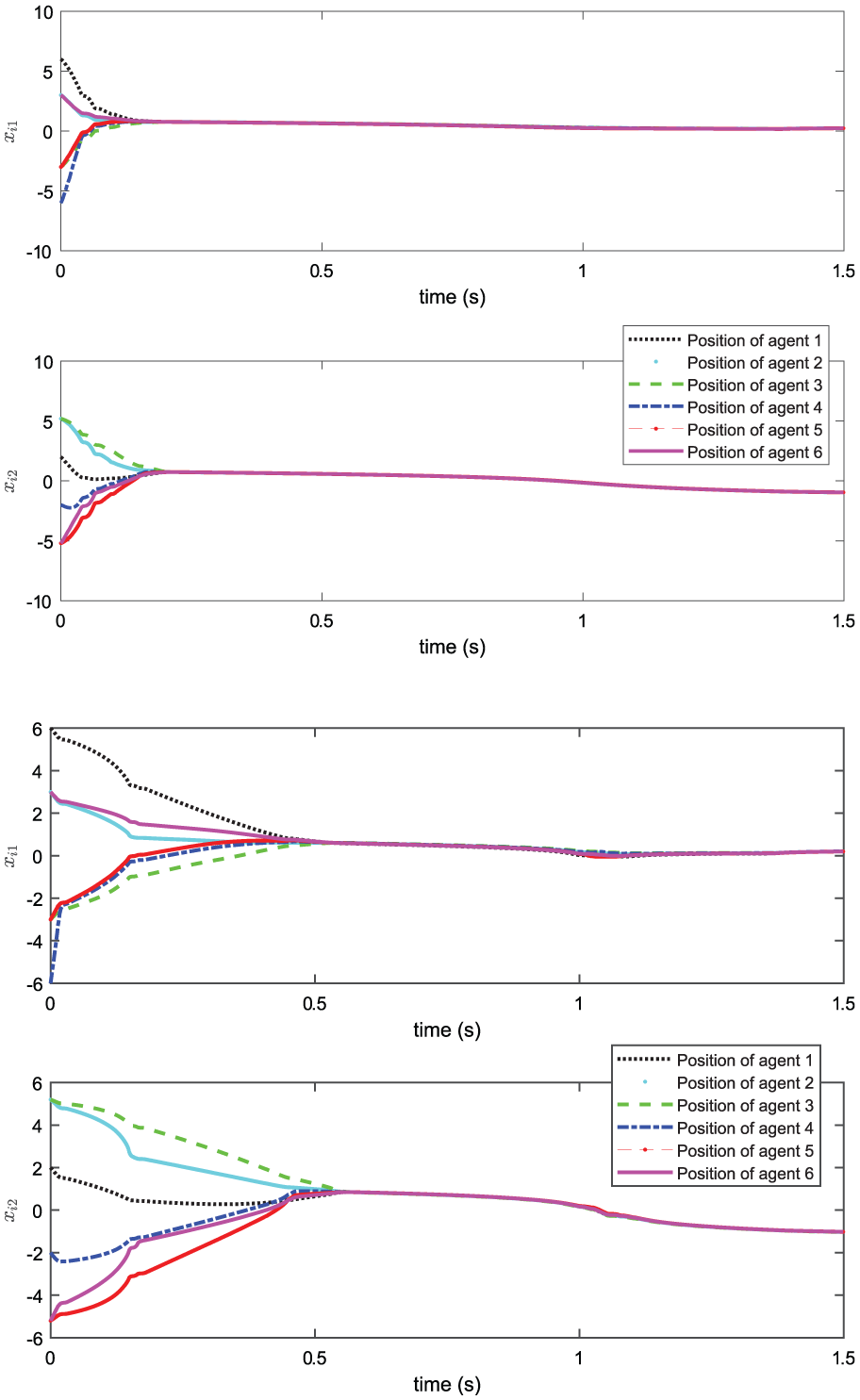
Position of agents in Example 2: (a)
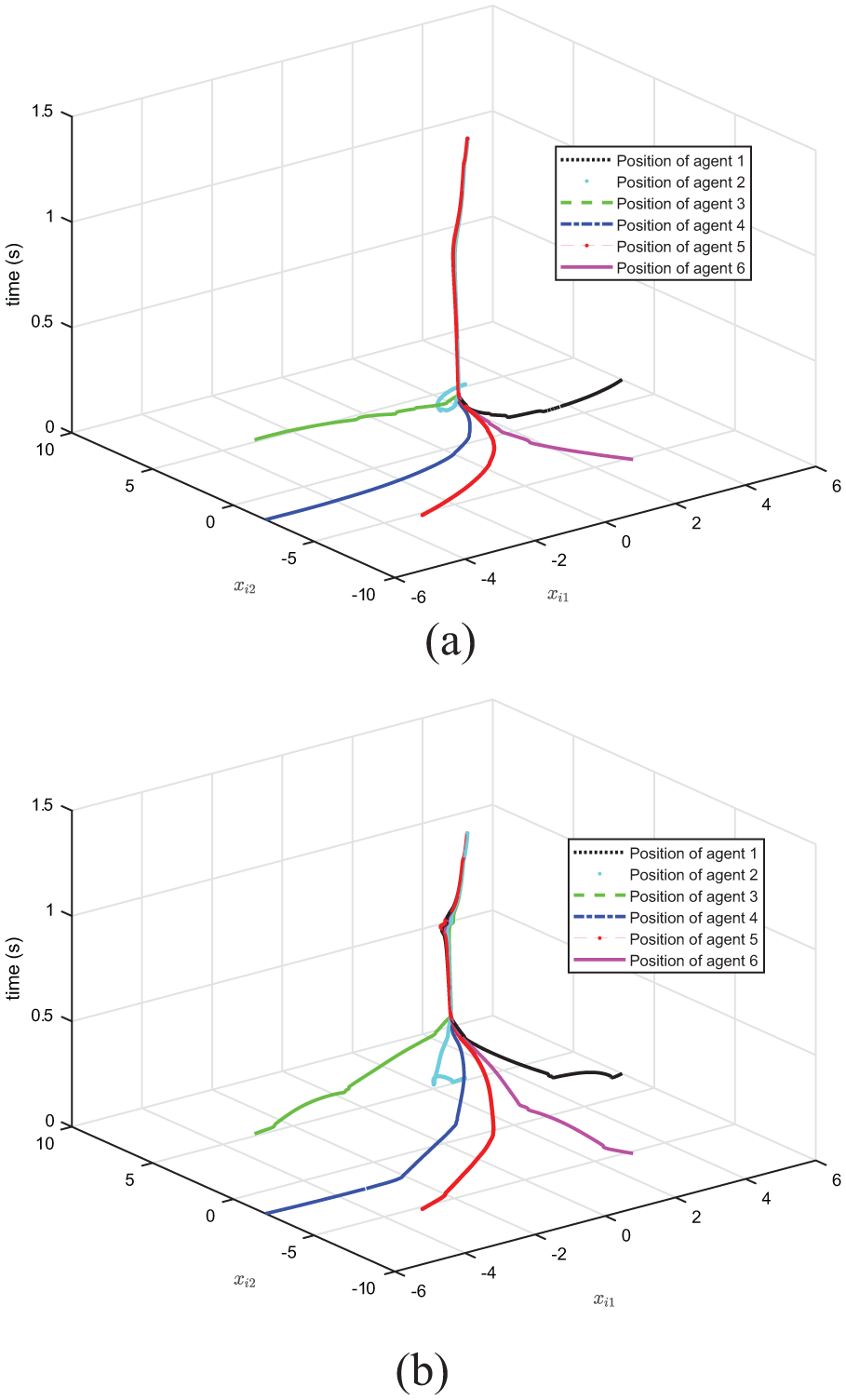
Position of agents in Example 2 in three-dimensional view: (a)
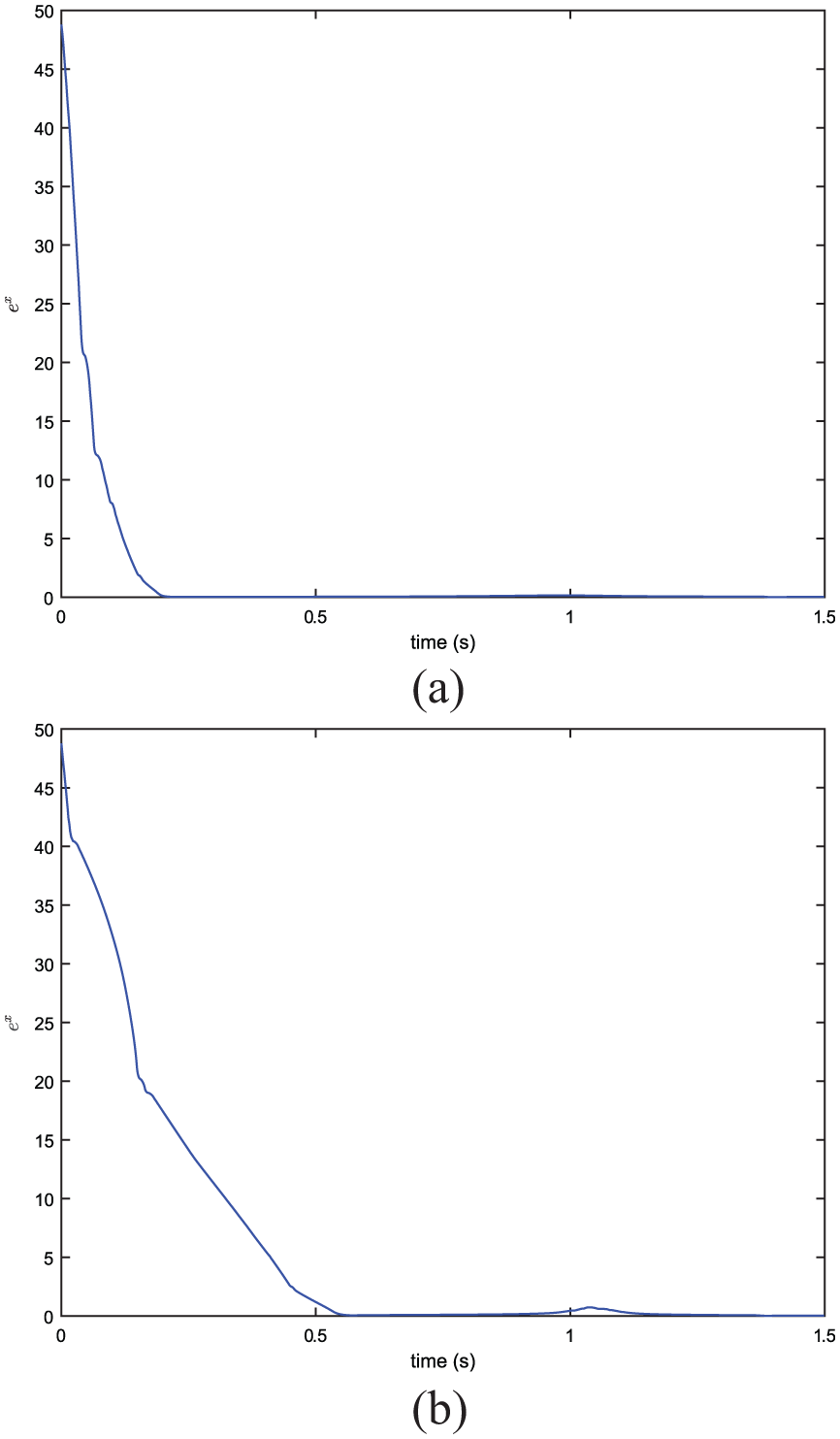
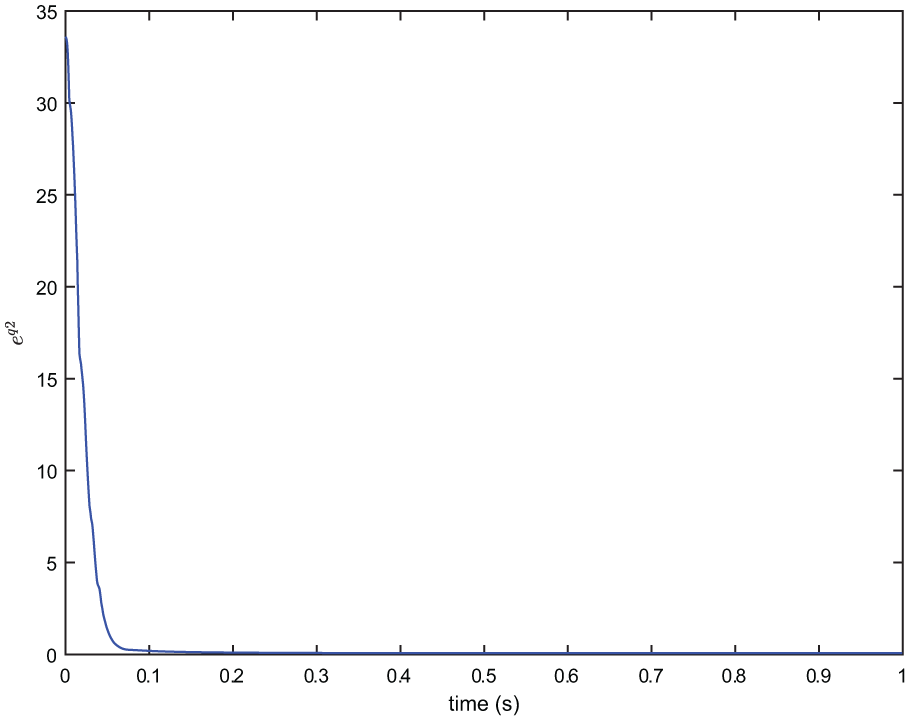
Total consensus error
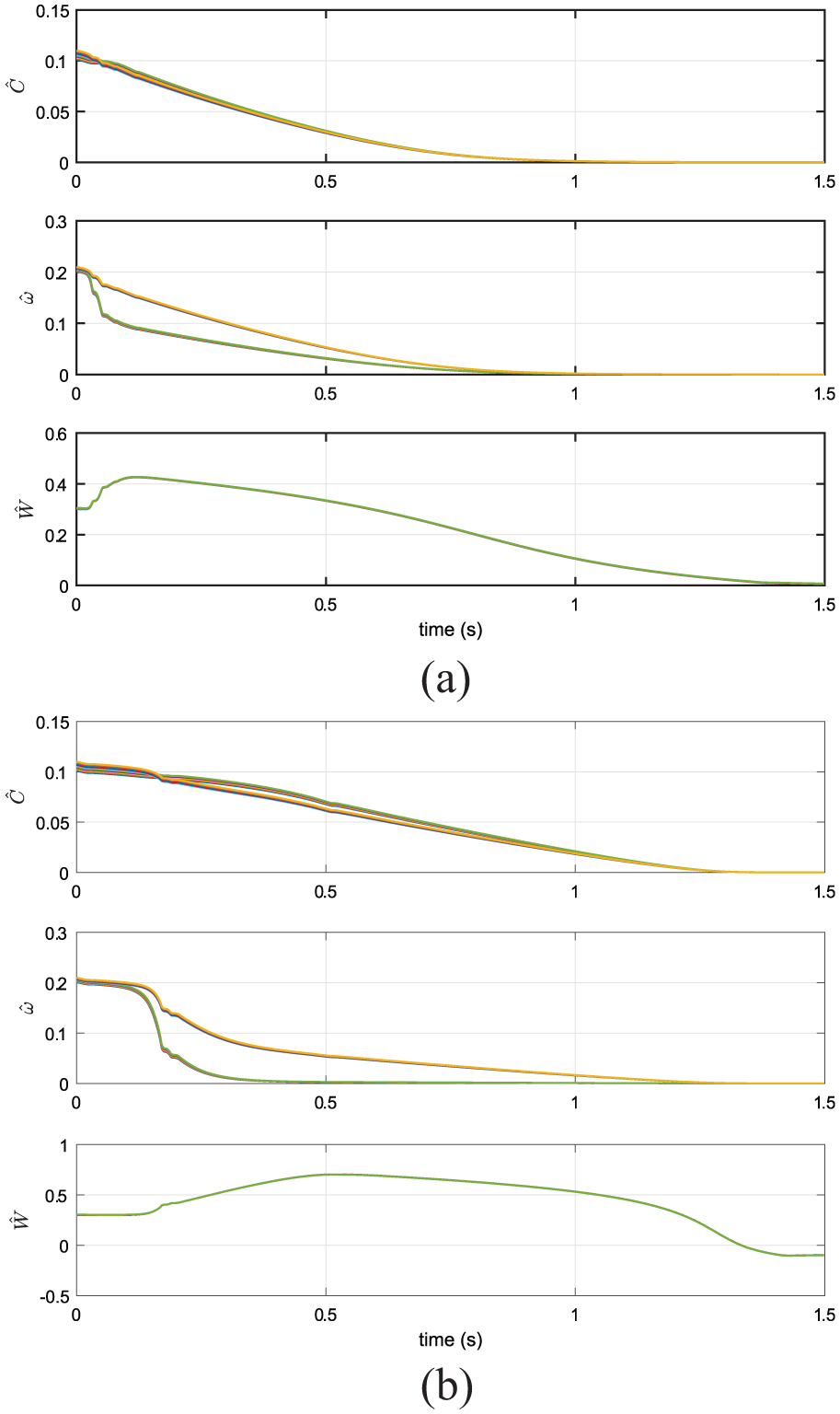
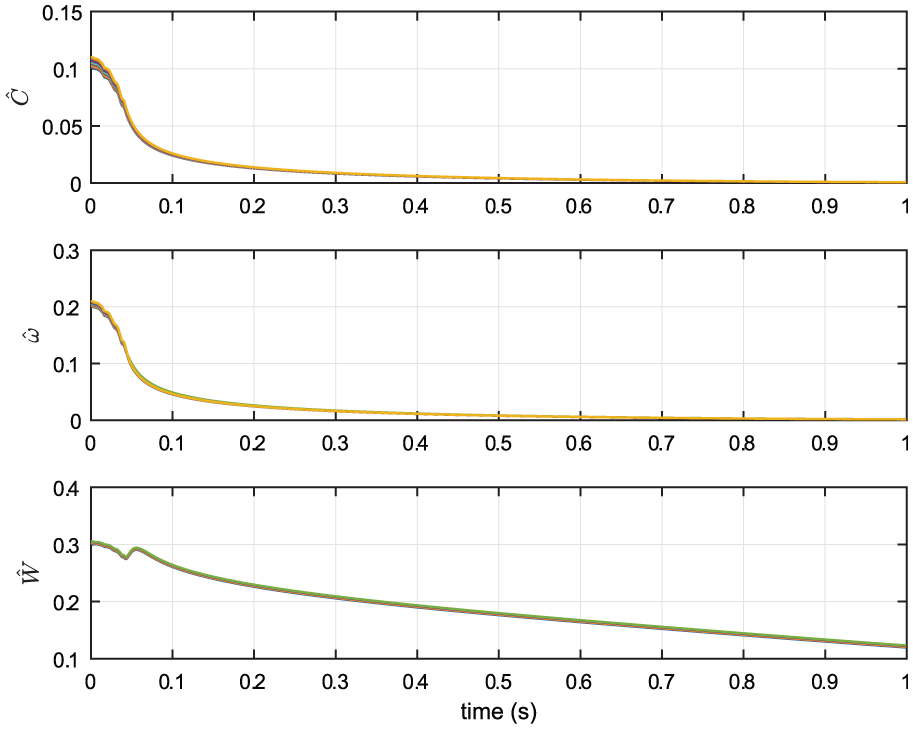
Adaptive fuzzy wavelet network parameters of agent 1 in Example 2: (a)
To study the effect of varying the controller parameters, the control gains are chosen as
Example 3
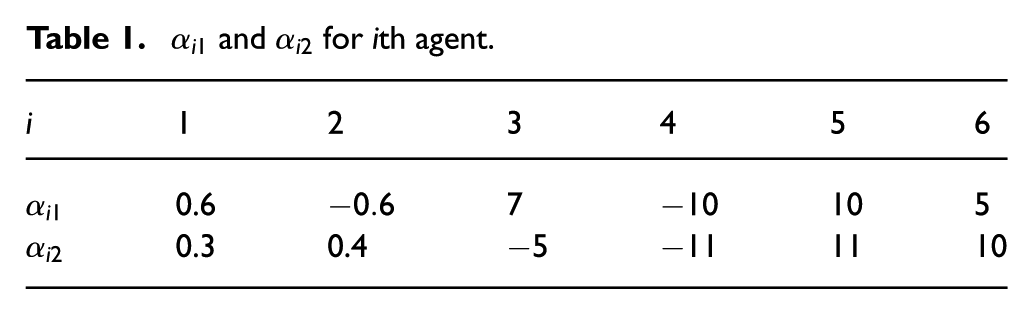
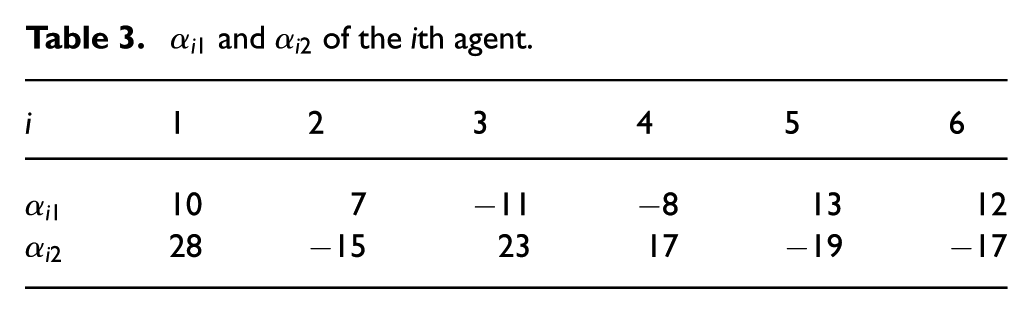
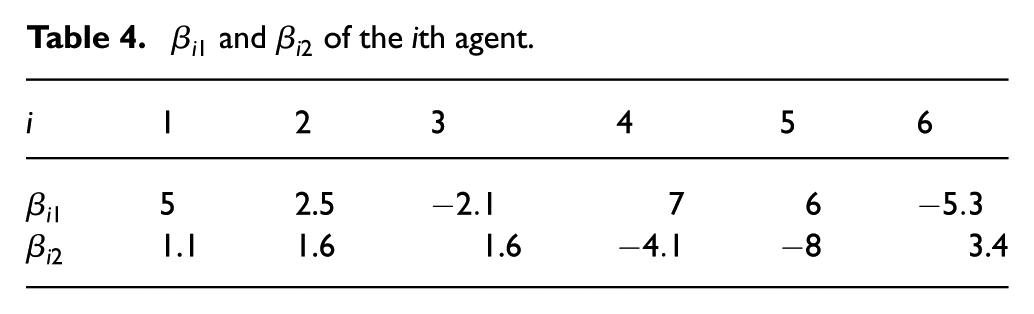
To show the effectiveness of the proposed control algorithm in Theorem 2, a group of two-link manipulators is studied in this example. The objective of this group could be to load a workpiece or hold up an object. Six agents, with the following system dynamics, are considered (Chen et al., 2014)
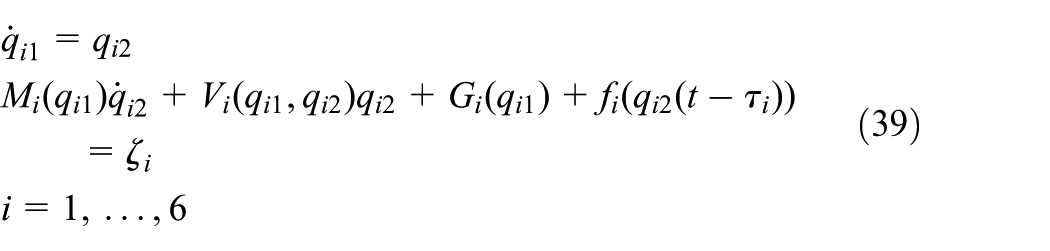
where

shows the centripetal Coriolis matrix of the ith agent, where

indicates the friction force of the system,
Initial values of states in ith agent,
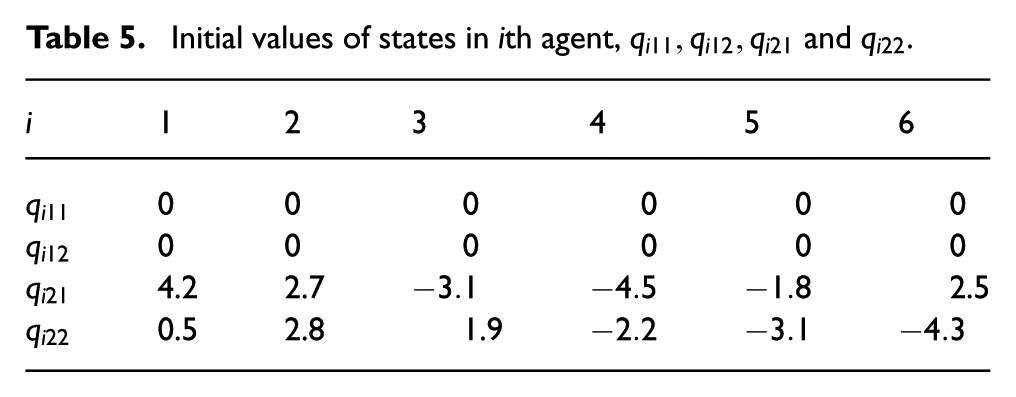
Equation (26), and the adoptive laws in Theorem 2 are used to design a proper controller for the six manipulators to reach consensus in their velocity. In this example, the control gain is chosen as
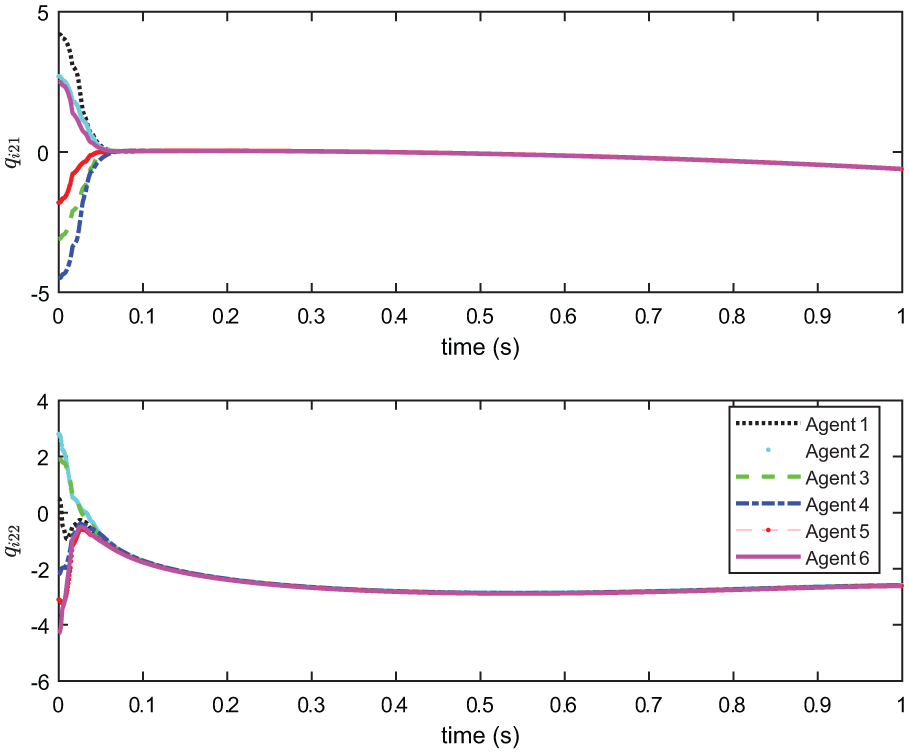
Trajectories of velocities of first and second joints of manipulators in Example 3.
Total velocity consensus error
Adaptive fuzzy wavelet network parameters of agent 1 in Example 3.
Conclusion
Two novel control algorithms were presented in this paper. The first scheme tackles the consensus control problem of first-order nonlinear multi-agent systems and uses AFWNs to compensate for nonlinear dynamics. The second control algorithm copes with consensus control problems of time-delayed multi-agent systems with uncertain nonlinearities. In the second algorithm, appropriate Lyapunov–Krasovskii functions are applied to deal with unknown state time-delayed terms. Finally, the uniformly ultimately bounded stability of both control approaches was proved. Simulation results were obtained to illustrate the effectiveness of the presented methods; then a performance measure was employed to show the total consensus error of closed-loop systems. However, there are numerous challenging problems, such as consensus control of nonlinear multi-agent systems with switching topologies and control in the presence of a fault, which we face in real-world applications. It is intended that future works will address the consensus control problem of time-delayed nonlinear multi-agent systems with switching topologies under disturbances and fault conditions. Moreover, the problem of communication time delay in multi-agent systems is another interesting research topic for future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.