
Abstract
Magnetic micromanipulators with a wide range of force generating capabilities are able to manipulate micron size particles for various applications and measurements. These magnetic particles can be coated with receptors to specifically bind to target biomolecules. In this work, a horizontal magnetic micromanipulator is designed, modeled and controlled for single micron size magnetic particle manipulations. A method is presented for dynamic modeling of magnetic micromanipulators. A feedback control method is designed that allows direct linearization of the system. It is shown that the proposed controller guarantees the stability of the closed-loop system, and yields zero steady-state error in a wide range of operation conditions. We show that the micromanipulator is able to generate a wide range of piconewton (pN) scale forces on a superparamagnetic particle for single molecule separation, and biosensor developments.
Introduction
Generating molecular scale force has a crucial role for biological processes and motions such as cell separation and DNA segregation (Capitanio and Pavone, 2013). The most significant techniques developed in recent years are the magnetic micromanipulators, optical tweezers and atomic force microscopy (Neuman and Nagy, 2008). Other techniques for manipulating single molecules include micro-needle manipulation (Aziz et al., 2012), dielectrophoresis-based tweezers (Kodama et al., 2013; Luo et al., 2018), flow induced stretching (Smith et al., 1992) and biomembrane force probe (Ju and Zhu, 2017). The molecule/cell manipulation methods are in their infant stage and have a big potential for various practical applications in different fields. The general properties of the magnetic micromanipulation techniques are different than the macro-scale magnetic manipulators, for example, magnetic levitation systems (Eroğlu and Ablay, 2016). To manipulate single molecules/cells to distances ranging from nanometer to millimeter lengths, a relatively small amount of force in the range of 10−14–10−8 N must be generated by current methods (Neuman and Nagy, 2008). Manipulation of single molecules has been performed for investigating receptor binding strength or location (Litvinov et al., 2002) and for measuring adhesion forces (Prass et al., 2006). While the early applications were used for characterization of motor proteins (Svoboda and Block, 1994), the recent applications include elasticity measurements and manipulations in nucleic acids (Fuller et al., 2006), characterization of antibody binding (Li et al., 2013), and investigation of protein multi-state unfolding (Pelz et al., 2016).
Magnetic micromanipulators offer safe operations in biological environments and precise measurements can be obtained from permanent magnets or electromagnets to produce controlled forces and torques for various applications (Gosse and Croquette, 2002; Kriegel et al., 2017; Vlaminck and Dekker, 2012). While permanent magnets offer empirical study-based simple designs and do not need any feedback control action unless motorized, electromagnets offer a variety of different design options with controlled magnetic force generations.
In general, the magnetic micromanipulators can be designed in vertical or horizontal schemes. In vertical magnetic micromanipulators, the magnetic force strength is adjusted via magnet movements (either away or closer to the sample). Some applications in the literature report the measurement of DNA molecule from the tethered bead (Huhle et al., 2015; Klaue and Seidel, 2009; Smith et al., 1992; Strick et al., 2000). The vertical magnetic micromanipulators require complex and sophisticated calibration techniques. To eliminate the calibration requirements, horizontal magnetic micromanipulators have been reported (Fabian et al., 2018; McAndrew et al., 2016; Schwarz et al., 2013; Yan et al., 2004). However, the reported designs are based on permanent-magnets and the motion of these magnets are manually controlled by electric motors.
In this work, a full automatic horizontal magnetic micromanipulator based on feedback controlled electromagnets is presented. A dynamic force model is provided based on the magnetic monopole and magnetic circuit approaches, and an automatic control method is also proposed for the horizontal magnetic micromanipulator. The powerful (robust and accurate) numerical solvers are used to quantitatively predict the magnetic forces, and systematically investigate the effects of different electromagnet geometries and configurations. Finally, a simple feedback linearizing controller is designed, and its implementation results are provided to show the effectiveness of the proposed design and control.
In the following sections, the fundamentals of magnetic particles and their applications, system modeling and control design approaches, and experimental results are provided.
Magnetic particles and their applications
Superparamagnetic particles are commercially produced in different sizes (from 120 nm to 10 µm), and are composed of iron oxide nanoparticles that are typically made of magnetite (Fe3O4) or maghemite (γ-Fe2O3), and polymer matrix coatings (Fonnum et al., 2005). The superparamagnetic materials are easily magnetized by external magnetic fields, but they exhibit a non-magnetic behavior in the absence of external magnetic field, namely, residual magnetization or hysteresis phenomenon does not occur. In addition, their relative magnetic permeabilities are as strong as the ferromagnetic materials.
Magnetic particles as a powerful non-invasive tool, find applications in various fields including biomedical, environmental and information storage systems (Gijs, 2004; Hermanson, 2013). Antibody-coated, streptavidin-dextran-coated and fluorescence-coated Fe3O4 magnetic particles are commercially available for versatile biomedical applications. As shown in Figure 1, the application areas can be grouped into two fields: diagnosis and therapy (Rahman et al., 2015). Below, some of the significant biomedical applications of superparamagnetic particles will be summarized.
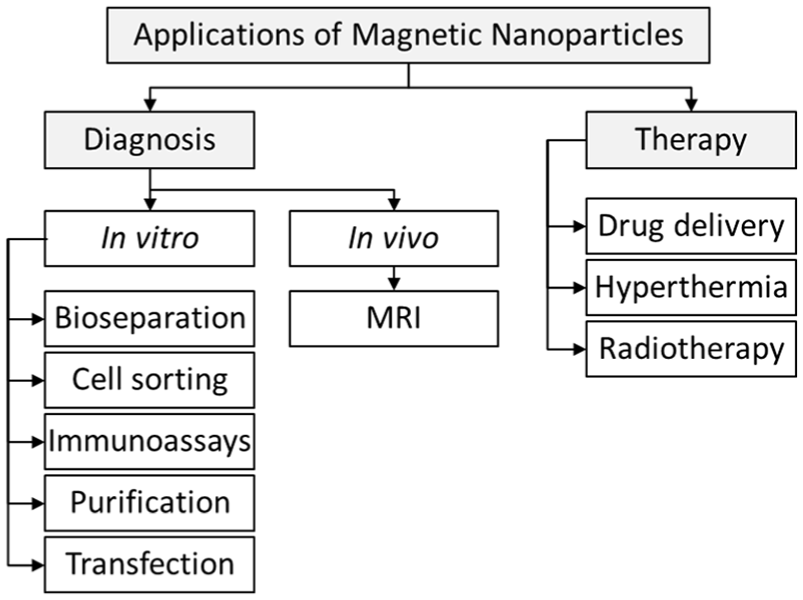
Usages of superparamagnetic particles.
Magnetic separation
Magnetic particles such as superparamagnetic particles have been used for separation of cells or molecules because of their small size, good dispersibility, and promising separation mood. One common magnetic separation method is based on antibodies conjugated particles that can specifically bind to their matching antigens on the surface of the target. To separate the labeled entities, a suitable external magnetic field must be applied to attract and carry the magnetically labeled entities in specific regions. In this way, separation of tumor cells from blood, isolation of certain enzymes, and extraction of DNA/RNA from body fluids can be possible (Plouffe et al., 2015).
Diagnostics
The superparamagnetic nanoparticles can be used to enhance magnetic resonance imaging (MRI) contrast. The applied magnetic field causes a small fraction of protons to line up parallel to the field. Once the magnetic field is turned off, the amplitudes of magnetic moments relax back to their initial values. During this relaxation, the signal variation is measured. The magnetic nanoparticles are used to reduce this relaxation time of protons. If the relaxation time in a region tagged by magnetic particles is lower than the untagged regions, a strong contrast is obtained. This is the basis of the MRI contrast enhancement between the different types of cells (Kim et al., 2003; Lawaczeck et al., 1997). This method can be used to diagnose malignant tumors (Agostini et al., 2016).
Therapy
Magnetic nanoparticles can be used to kill malignant cells by heating the target tissue to temperatures around 43oC. This targeted treatment technique is known as hyperthermia. The principle of the concept is based on the heating of magnetic particle by hysteresis loss when located in a high frequency (∼1 MHz) magnetic field (Stauffer et al., 1984). The heating mechanism for ferromagnetic materials can be explained with hysteresis losses, while for superparamagnetic particles the heating can occur by the rotation of the particles (Rosensweig, 2002). It is possible to apply the magnetic particle heating any depth in the human body for the treatment of tumors. In addition, magnetic nanoparticle hyperthermia can also be used as an adjuvant therapy method for chemotherapy and radiotherapy.
Drug delivery
Chemotherapy is a non-specific method because the drugs are not specifically distributed to the required areas (resulting in undesirable side-effects). On the other hand, magnetic nanoparticles have been developed for localizing drug delivery to tumors (Tietze et al., 2015). The magnetic nanoparticle behaves like a drug carrier. The drug is attached to the outer surface of the magnetic particle, or it is dissolved in the coating. First, the drug coated magnetic particles are introduced into the bloodstream of patient, and then the external magnetic field is applied to retain these particles at the specified region. Finally, the drug is released via an enzymatic activity or a controlled triggering mechanism. In addition, radionuclides such as β–emitters can be bonded to the magnetic particles for targeted delivery.
Sensors
Magnetic particles have different composition, size, and magnetic properties. Using these features of magnetic particles, the biosensors can be functionalized to recognize specific molecular targets, and a time and cost-efficient signal amplification can be achieved. Magnetic particles are linked to other molecular labels such as antibody to improve sensitivity and provide signal amplification for the biological measurements (İçöz and Mzava, 2016; Icoz and Savran, 2010). The sensitivity and signal amplification of biosensors can be used to address some unmet clinical needs, such as discriminating benign prostatic hypertrophy from prostate cancer via a piezeoelectric/magnetic particle-based assay (Jokerst et al., 2015).
Artificial muscle
Artificial muscles can be developed from soft actuators including ferrogels, magnetic gels, magnetic field sensitive gels, magnetorheological elastomers, and magnetoactive polymers (Nguyen et al., 2012). These materials contain magnetic nanoparticles such that the particles respond to the external magnetic field and change the position of the surrounding polymer chain, hence the overall shape of the composite changes. By designing and using a suitable magnetic actuator, different actuation mode for the artificial muscle can be obtained such as elongation, contraction, deflection, and coiling.
System modeling and controller design
System and device
A magnetic micromanipulator generates an external force on the superparamagnetic particle proportional to the gradient of the square of the magnetic field. Large magnets generate strong magnetic fields, but weak field gradient, and thus slowly changing forces in a large area. It is possible to produce strong magnetic forces and sharp field gradients with small magnets, but the magnetic force diminishes fast with the distance. Figure 2 illustrates these features for different sizes of N52 grade neodymium magnets (where R is the radius), and these results are compatible with electromagnets. Hence, it is desirable to apply magnetic force in the close neighborhood of magnets. Magnetic force can be produced by single or multiple electromagnets. To meet different application requirements of single-molecule manipulation, such as spatial control and torque production, different configurations of electromagnets should be considered.
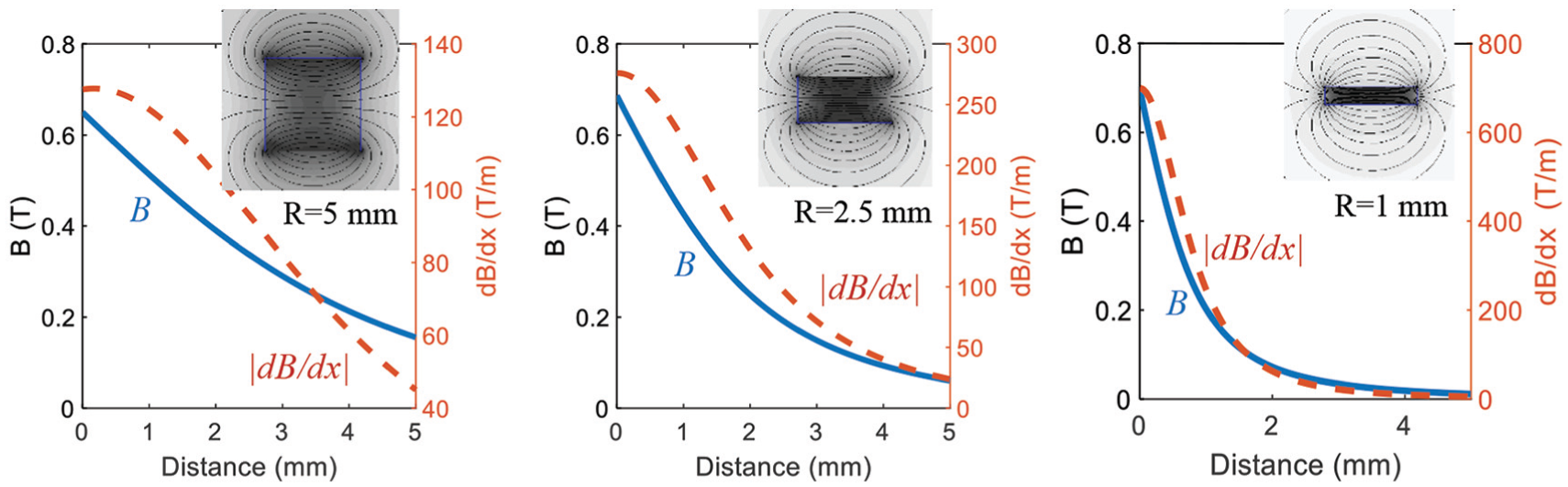
Magnetic field and field gradient variations with magnet size.
In this work, a horizontal micromanipulator system is designed, as illustrated in Figure 3. In the design, we have considered the significant factors related to the magnetic particle behavior. There are key factors affecting the behavior of magnetic particles in a fluidic environment. Some of these factors can be observed and controlled. Viscosity, size, and magnetic content of the particle, temperature and ionic force effect, and magnetic force have direct impact on the designs. To produce adequate magnetic force to attract the particle, the electromagnets are strengthened with ferromagnetic core structures in the designs. The core is constructed with soft iron or steel for generating strong magnetic forces. In addition, in the design the effects of material saturation and hysteresis (and possible heating issue) are taken into account for healthy operations. A camera attached microscope system is used to detect and measure the position of the magnetic particles.
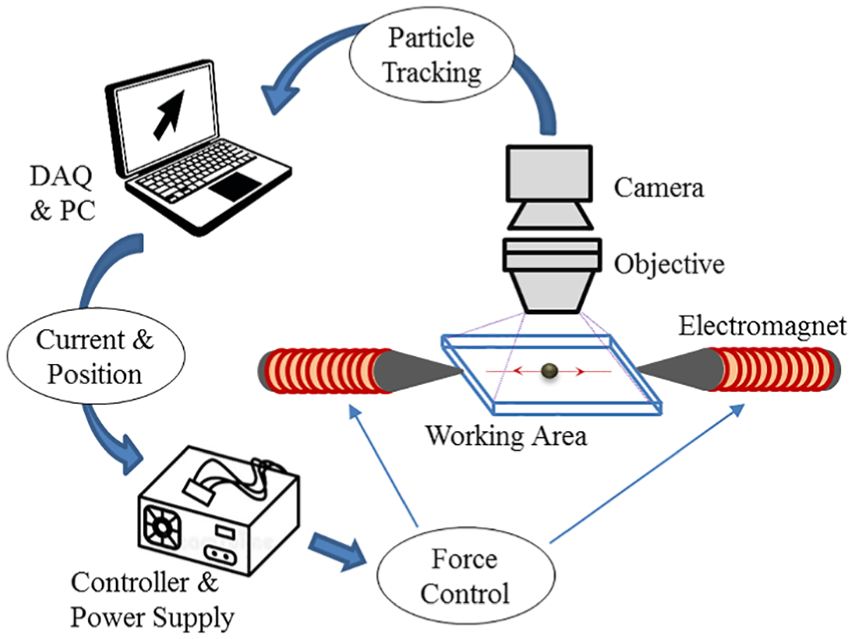
Horizontal magnetic micromanipulator setup.
Fluidic reservoir (working area) is made of Polymethyl methacrylate (PMMA) material, a plastic material known as Plexiglas. A piece of PMMA is cut and shaped using a laser cutter, and then placed in the central area of the magnetic pole tips. A motorized manipulator used to adjust position of micromanipulator and camera system in xyz directions. The fine motor resolution, around several micrometers, allows focusing on particles with different sizes. For data acquisition and processing, a workstation equipped with high performance CPU and Matlab software is used. An image-based particle detection and tracking system is developed in Matlab. Center of mass particle detection and tracking algorithm is developed, and a threshold filter is used to separate the brightness differences between the particle and the background. For actuating and controlling the electromagnets, microcontrollers, power mosfet drivers and adjustable DC power supplies are used.
In general, a feedback control mechanism is needed to be developed for precise and fast control actions. The effective stiffness of the magnetic micromanipulator is determined by feedback control system. For analysis, calibration and control design goals, the first principles approach is used to obtain the system model. This model is also used to calculate the force and current needs, and to estimate the control parameters.
Magnetic particle dynamics
By considering Newton’s second law of motion and independent motion in x direction, the magnetic particle dynamics in fluidic environment is given by

where
According to Stokes’ law (Happel and Brenner, 1983), the damping coefficient for a spherical object in a viscous fluid is given by

where

where
The gravitational force due to the gravity and buoyancy can be given by (Hejazian et al., 2015)

where
Some other forces can also have an effect on the micro-particle including lift force, particle–particle interaction force, magnetic interaction force, van der Waals attraction force, thermophoretic force, and electrostatic interaction force between particles. Depending on the application, some of these forces can be added to the model.
While there exist various forces acting on the micro-particle, it is possible to neglect most of these forces depending on the particle size, working environment, and magnetic force level. Since the electromagnets produce a relatively high magnetic field, the magnetic force and the drag force are the most dominant forces for magnetic particles whose diameter is around 1 to 10 µm (Hejazian et al., 2015), and thus, all other forces might be neglected in system design and analysis. Specifically, the magnetic force must be generated adequately to satisfy desired control actions because it is the control input of the magnetic particle dynamics given in (1).
Magnetic force on a magnetic particle
The magnetic force acting on a magnetic particle is dependent on the magnetic moment

The second part of the equation holds when the magnetic moment of the particle is not varying in space (i.e. no current density on the particle). This expression is a strong function of spatial coordinates. The magnetic dipole moment of a weakly magnetic particle can be given by (Shevkoplyas et al., 2007)

where

To calculate the magnetic force, the components of the magnetic field vector are needed to be known. On the other hand, the magnetic force calculations can be specified and simplified by using some assumptions, that is, using the empirical results and magnetic dipole (point magnetic charge) approach. The magnetization or magnetic moment of the magnetic particles have been determined experimentally in some studies (Fonnum et al., 2005).
While equation (7) can be used for force calculations, the effect of demagnetization field should be included in the magnetization process. When a particle is magnetized by an external magnetic field, a self-field develops within the particle that opposes to the external magnetic field. This effect is called the demagnetizing field and defined by (Furlani, 2001)

where the demagnetizing field is given by

The magnetization inside the particle is then

The magnetic moment of a magnetic particle is then obtained as

where
Now, the magnetic field

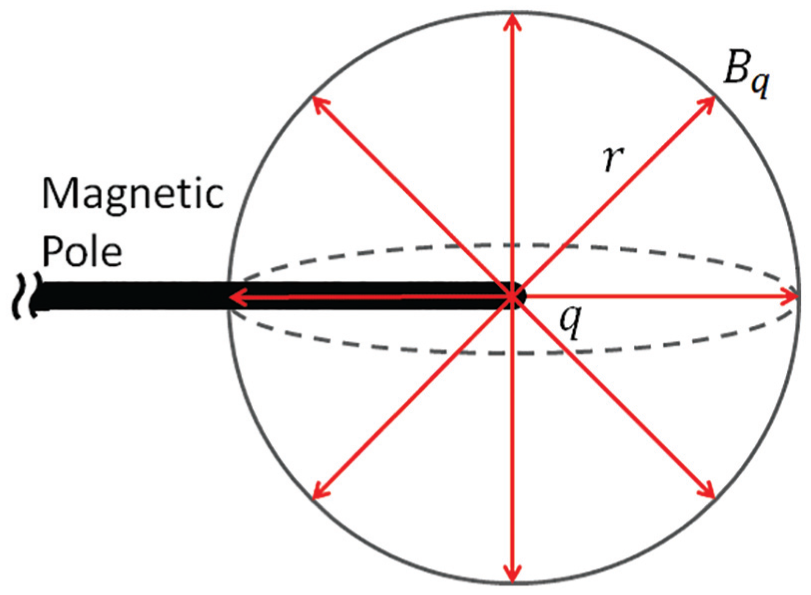
Magnetic monopole approach.
where

where

where

where

By considering the magnetic circuit, the electromagnets based magnetic actuator is characterized by reluctance

where

where the permeability of air is given by
By substituting the magnetic flux

Substituting (19) into force equation (15), the magnetic force model for each electromagnet is obtained as

It is clear that, by considering forces of all magnets, the magnetic force at the center of workspace

with

The model is simplified by eliminating the spatial dependence.
Model analysis
The electromagnets are designed with the same parameters and symmetrically located to pull the superparamagnetic particle in x-direction. The working area has a length of

where
The other significant part of the system is related to the dynamic behavior of the electromagnets. The electrical model of electromagnets can be written as

where the parameters of the electrical part of the system model are assumed to be equal due to the symmetric and identical coil designs, in which
A feedback linearizing controller design using offset current
A state feedback controller can be defined by using an offset current to effectively linearize the magnetic force model. Offset current based control design is based on changing variables with respect to the electromagnet currents. First, consider the magnetic force to current relation equation (21). Then, define current variables

Substituting (25) into (21), the force becomes

Now, when the magnitude of

where

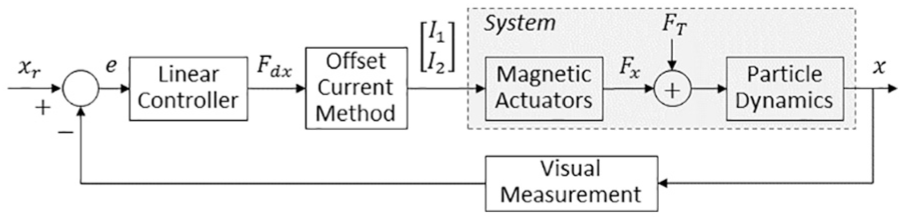
A feedback linearizing controller using offset current.
where
Since the controller linearizes the system, the linear analysis methods can be used for stability analysis of the closed-loop system. By substituting (27) into (23), the closed loop system becomes

By taking Laplace transform of (29) with the controller (28), we get the closed-loop transfer function as

From (30), the closed-loop system is stable if
Results
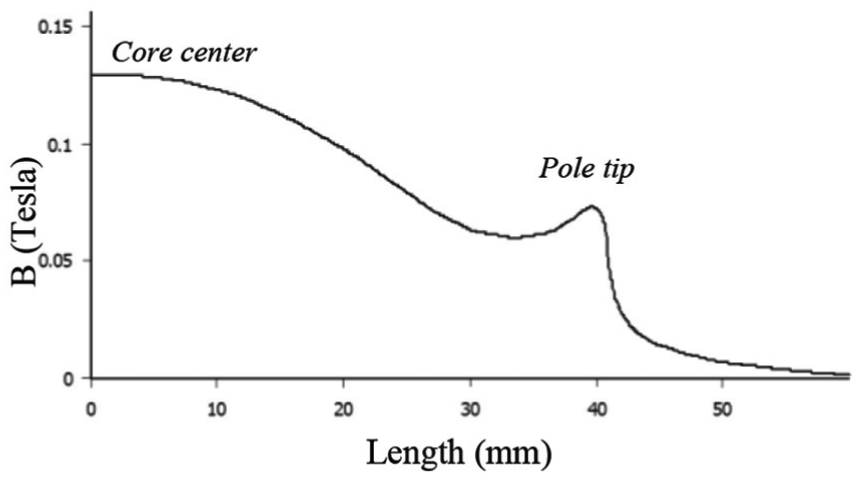
To get the suitable design for micromanipulation of a superparamagnetic particle, the COMSOL Multiphysics software is used as an advanced finite element numerical solver. In the final design, the coil is designed to have 2000 copper turns with a core of 75 mm length. The core is built with a Nickel-Iron alloy material due to its strong magnetic permeability and high saturation values (Davis, 2001). Different types of materials, such as Mu-metal, are considered as core material, but the Nickel-Iron alloy is used due to its low-cost price, easy accessibility, and high magnetic saturation current. The superparamagnetic particle has a radius of 5 µm, and the distance between the particle and coil tip is around 5 mm. The tip of the core material is designed to be circular. The magnetic flux density of an electromagnet is shown in Figures 6 and 7. It is seen that the magnetic flux density is strong at the core tip, but it decreases as a function of
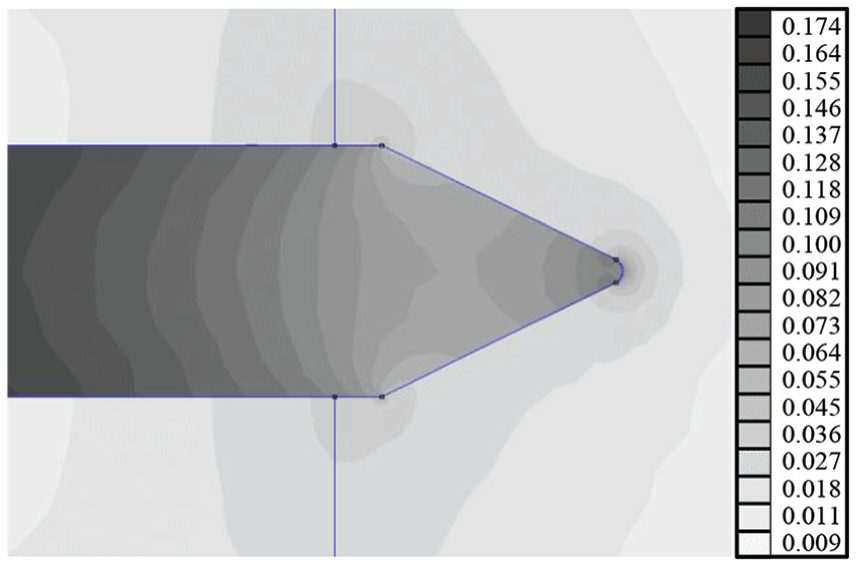
Magnetic flux density of an electromagnet, B (Tesla).
Distribution of the magnetic flux density.
A photo of the experimental setup of the horizontal magnetic micromanipulator is given in Figure 8. The superparamagnetic particles are controlled in a workspace whose radius is 500 µm. The sampling rate of the industrial camera is 53 frames per second (when the camera resolution is 640x480 pixels). The magnetic microparticle is detected as a circle with a particle detection and tracking algorithm, which is seen on the computer screen in Figure 8. An adjustable multichannel DC power supply with 0-30 V and 0-3 A outputs, power MOSFET driver circuits and PWM outputs of a microcontroller are used to produce the time-varying currents to control the electromagnets. The other details of the system are explained in Section 3.1.
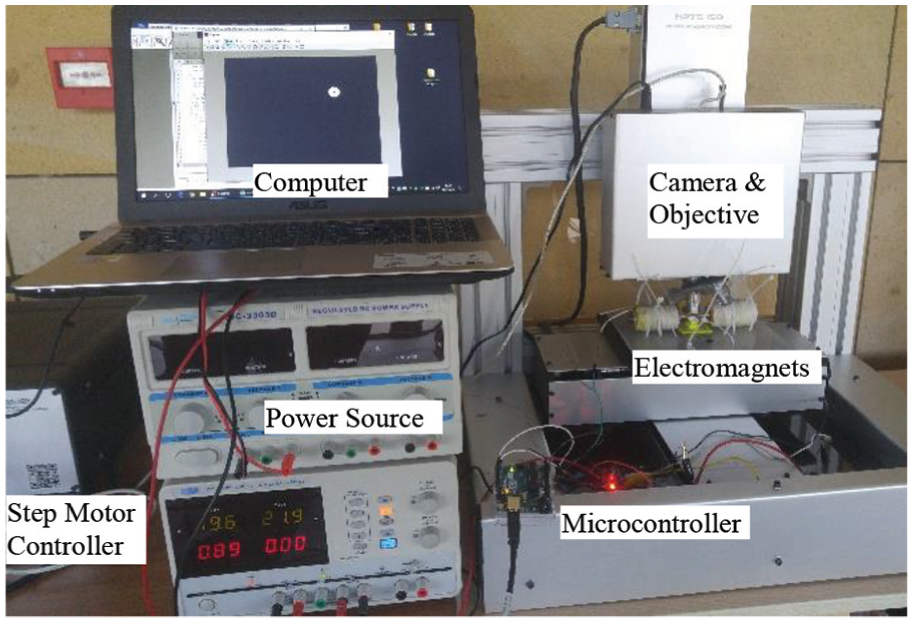
The experimental setup.
The horizontal position control experiments are done with step and sinusoidal setpoints. Figure 9 shows the step response of the horizontal micromanipulator. The model parameters are calculated as
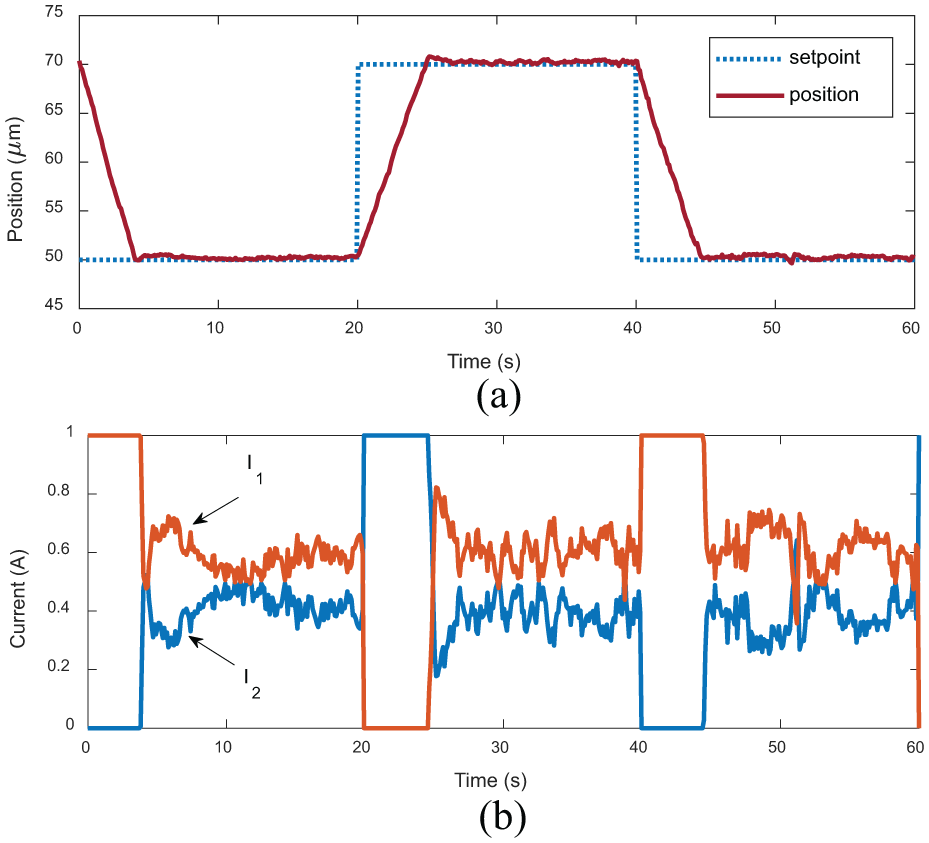
Experimental control results for step setpoint, (a) particle position and (b) control currents.
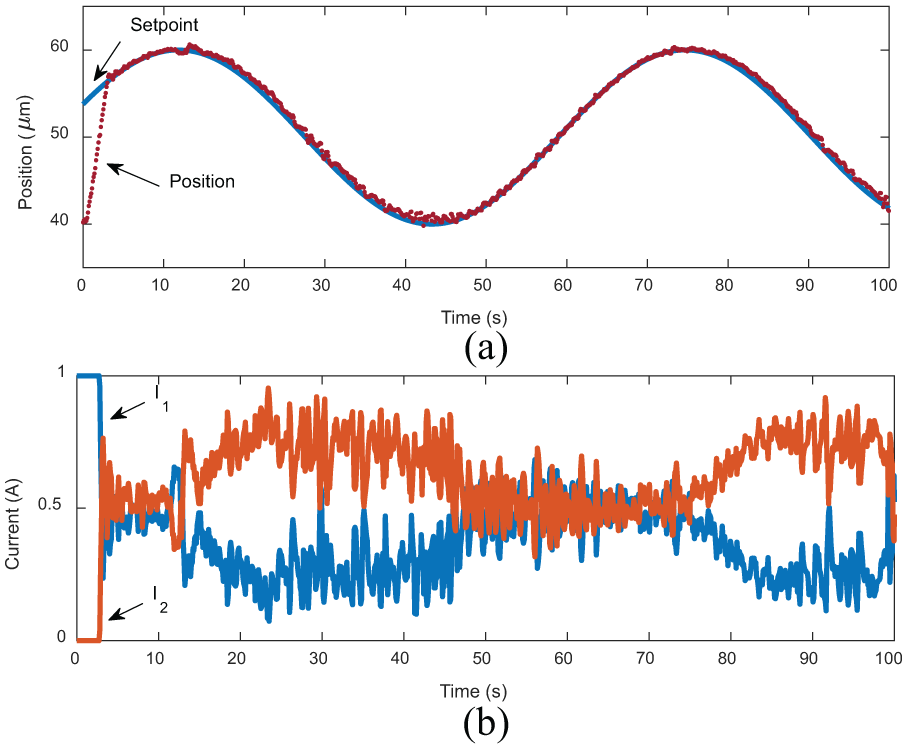
Experimental control results for sinusoidal setpoint, (a) particle position and (b) control currents.
Conclusion
A full automatic horizontal magnetic micromanipulator is developed and implemented in aqueous solution to manipulate superparamagnetic particles. A dynamic model of the system is developed using magnetic monopole and magnetic circuit approaches, and this model is used to develop a feedback linearizing controller for precise positioning. A visual particle detecting and tracking algorithm is developed to measure the position of the target superparamagnetic particle. The proposed controller benefits from system model, offset current, and linear controller, and effectively eliminates the input nonlinearity and position dependency of the micromanipulator to perform a satisfying control performance within the workspace. The applied control current is limited to maximum 1 A to avoid saturation and hysteresis of magnetic materials. The magnetic micromanipulator is able to generate up to 24 pN force on the magnetic particle whose radius is less than 5 µm, which allows a full automatic control in the workspace with a maximum particle speed of 5 µm/s at the center. The developed system can be used in applications in cell/molecule manipulation, DNA extraction and biosensors.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflict of interests with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Turkish Scientific and Research Council (TUBITAK) under project number 116E168.